






专利摘要
在一个实施方案中,致动器包括移动框架,其通过多个细长的平行运动屈曲部耦联到固定框架以相对于固定框架在制造位置和展开位置之间进行大致平行的运动。屈曲部布置成当移动框架布置在制造位置中时,相对于垂直于移动框架和固定框架延伸的线呈第一角度,并且当移动框架布置在展开位置中时,相对于同一线呈第二角度。通过将第一角度的值约束成小于第一和第二角度总和的大约一半,来控制第一框架相对于第二框架的弧形运动。
权利要求
1.一种致动器,包括:
移动框架,其通过多个细长的平行运动屈曲部耦联到固定框架以相对于所述固定框架在制造位置和展开位置之间进行大致平行的运动,
屈曲部,其布置成当所述移动框架布置在所述制造位置中时,相对于垂直于所述移动框架和所述固定框架延伸的线呈第一角度,和当所述移动框架布置在所述展开位置中时,相对于同一线呈第二角度,
其中所述第一角度小于所述第一和第二角度的总和的大约一半。
2.如权利要求1所述的致动器,其中所述第一角度在所述第一角度和第二角度的总和的大约0.32和大约0.42倍之间。
3.如权利要求1所述的致动器,还包括多个相互交叉的齿,其固定部分附接到所述固定框架,其移动部分附接到所述移动框架。
4.如权利要求1所述的致动器,其中所述移动框架、所述固定框架和所述平行运动屈曲部在配置上均是大致平面的并且布置成彼此大致共面。
5.如权利要求3所述的致动器,其中所述移动框架、所述固定框架、所述平行运动屈曲部和所述齿利用光刻技术由硅晶片制造为单个整体件。
6.如权利要求1所述的致动器,还包括一机构,该机构用于:
将所述移动框架从所述制造位置推到所述展开位置;和
将所述移动框架保持在所述展开位置。
7.一种包括权利要求1所述的致动器的微型相机。
8.一种包括权利要求7所述的微型相机的电子设备。
9.如权利要求8所述的电子设备,其中所述电子设备包括移动电话、计算机、膝上型电脑、个人数字助理PDA或监控摄像机。
10.一种方法,包括:
提供致动器,其配置成控制所述致动器中的弧形运动,其中:
所述致动器是包括移动框架的类型,所述移动框架通过至少两个细长的平行运动屈曲部耦联到固定框架以相对于所述固定框架在完全关闭位置和完全打开位置之间进行大致平行的运动,和
所述至少两个屈曲部布置成当所述移动框架布置在所述完全关闭位置中时,相对于垂直于所述移动框架和所述固定框架延伸的线呈第一角度,和当所述移动框架布置在所述完全打开位置中时,相对于同一线呈第二角度,
将所述第一角度限制为一值,其导致所述移动框架在所述关闭位置处的最小横向位移。
11.如权利要求10所述的方法,其中所述限制包括导致所述移动框架在所述完全打开位置处的最大横向位移和当所述移动框架布置在所述完全打开位置和所述完全关闭位置之间的位置处时所述移动框架的中间横向位移的值,所述中间横向位移小于所述最大横向位移并大于所述最小横向位移。
12.如权利要求11所述的方法,其中所述方法包括将所述第一角度限制为一值,该值导致当所述移动框架布置在所述完全打开位置和所述完全关闭位置之间的距离的大约三分之二的位置处时,所述中间横向位移是所述最大横向位移的大约四分之一。
13.如权利要求10所述的方法,其中所述方法还包括将所述第一角度限制为一值,该值导致当最小致动电压施加到所述固定框架和移动框架时,所述移动框架具有最大横向位移,当最大致动电压施加到所述固定框架和移动框架时,所述移动框架具有最小横向位移,和当小于所述最大致动电压并大于所述最小致动电压的中间致动电压施加到所述固定框架和移动框架时,所述移动框架具有小于最大横向位移并大于所述最小横向位移的中间横向位移。
14.如权利要求10所述的方法,其中所述方法包括将所述第一角度限制为小于所述第一角度和第二角度的总和的大约一半的值。
15.如权利要求10所述的方法,其中所述方法包括将所述第一角度限制为在所述第一角度和第二角度的总和的大约0.32和大约0.42倍之间的值。
16.一种用于制造致动器的方法,该方法包括:
形成大致平面的移动框架和大致平面的固定框架;和
通过多个细长的大致平面的屈曲部将所述移动框架耦联到所述固定框架以使得:
所述移动框架是可移动的,可相对于所述固定框架在第一位置和第二位置之间进行大致共面的、平行的运动;
所述屈曲部布置成当所述移动框架布置在所述第一位置中时,相对于垂直于所述移动框架和所述固定框架延伸的线呈第一角度,和当所述移动框架布置在所述第二位置中时,相对于同一线呈第二角度;和
所述第一角度小于所述第一角度和第二角度的总和的大约一半。
17.如权利要求16所述的方法,其中所述第一角度在所述第一角度和第二角度的总和的大约0.32和大约0.42倍之间。
18.如权利要求16所述的方法,其中所述形成还包括在所述固定框架和所述移动框架上形成各自的多个齿,所述齿布置成彼此相互交叉并且在所述移动框架相对于所述固定框架移动的情况下大体上彼此平行地移动。
19.如权利要求16所述的方法,其中所述形成还包括在所述固定框架和所述移动框架上形成大致平面的机构,用于使所述移动框架从所述第一位置转移到所述第二位置并用于将所述移动框架保持在所述第二位置中。
20.一种包括权利要求16所述的致动器的微型相机。
21.一种包括权利要求20所述的微型相机的电子设备。
说明书
相关申请的交叉引用
本申请是申请日为2013年3月15日、申请号为13/843817的美国专利申请的后续申请,其是申请日为2013年3月15日、申请号为13/843107的美国专利申请的部分继续申请,它们的全部内容通过引用的方式并入本文中。
技术领域
本发明的一个或多个实施方案总的涉及静电致动器,更特别地例如,涉及用于控制它们中不希望有的弧形运动的方法和装置。
背景技术
用于微型相机和其他设备中的致动器是众所周知的。这种设备通常包括音圈,其用于移动透镜以便聚焦、变焦或光学图像稳定。
微机电系统(MEMS)致动器也是公知的,MEMS致动器的例子包括静电梳状驱动器、刮板式驱动器和热驱动器,超小型静电MEMS致动器可以用众所周知的晶片级集成电路(IC)制造技术来制造,并且可用于各种应用中。例如,静电MEMS致动器可用于移动物镜以便实现微型相机中的自动聚焦、变焦和图像稳定功能,微型相机在各种主机设备中都是有用的,例如移动电话、计算机、膝上型电脑、个人数字助理(PDA),监控摄像机等等。因而,所希望的是,为这样的应用提供改进的静电MEMS致动器装置。
静电MEMS致动器容易遭受被称为“弧形运动”的问题。特别地,这种致动器的梳状驱动器包括多个相互交叉的指或齿,其一部分附接到固定台架或框架,一部分附接到移动框架。期望的是,梳状驱动器的齿在操作期间基本上彼此平行地移动以避免接触、干涉、“卡住”和“颤动”问题,这又要求移动框架的移动基本上平行于固定框架。然而,由于将移动框架偶联到固定框架的弹性平行运动屈曲部的特性,移动框架在运动期间必然相对于固定框架经历一些二阶弧形运动,如果不加以控制,这可以导致上述和其它问题。
因而,对于用于控制、补偿和/或调节静电致动器的梳状驱动器中的弧形运动的便宜又可靠的方法和装置存在长期以来感受到但仍未得到满足的需求。
发明内容
根据本发明的一个或多个实施方案,提供了方法和设备用于控制静电致动器的梳状驱动器中的弧形运动,其便宜、可靠且在制造过程中相对容易实施。
根据一个实施方式,致动器包括移动框架,其通过多个细长的平行运动屈曲部耦联到固定框架以相对于固定框架在制造位置和展开位置之间进行大致平行的运动。屈曲部布置成当移动框架布置在制造位置中时,相对于垂直于移动框架和固定框架延伸的线呈第一角度,当移动框架布置在展开位置中时,相对于该线呈第二角度。通过将第一角度的值约束成小于第一和第二角度总和的大约一半,来控制第一框架相对于第二框架的弧形运动
改进的致动器特别好地适合于制造在电子主机设备,如移动电话、计算机、膝上型电脑、个人数字助理(PDA)、监控摄像机等等,中所使用类型的各种微型透镜镜筒和微型相机模块。
本发明的范围是由后面所附的权利要求限定,其通过引用方式纳入本节中。通过考虑下面提出的一些示例性实施方案的详细描述,特别是如果结合下面简要描述的附图进行这种考虑,则对用于控制致动器中的弧形运动的新方法和装置和用于制造和使用它们的方法的特征和优点的更完整的理解将被提供给本领域技术人员,在附图中相同的附图标记用来表示在其一个或多个相应的图中所示的相同元件。
附图说明
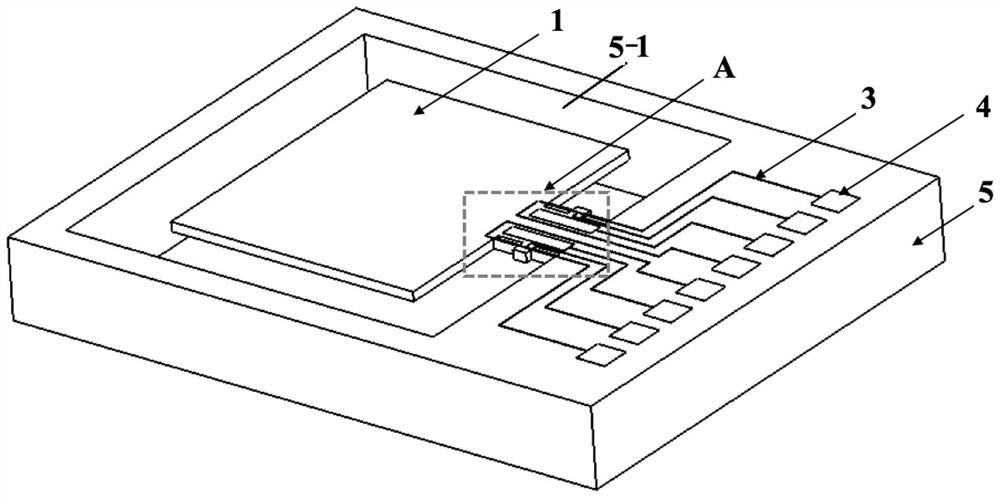
图1A是示例性静电致动器的俯视图,其中可以有利地使用本发明的方法和装置的实施方案,该致动器被表示为处于制造状态中且在其展开以便操作使用之前。
图1B是根据本发明实施方案的图1A的示例性致动器设备的俯视图,其被表示为在被展开以便操作使用之后。
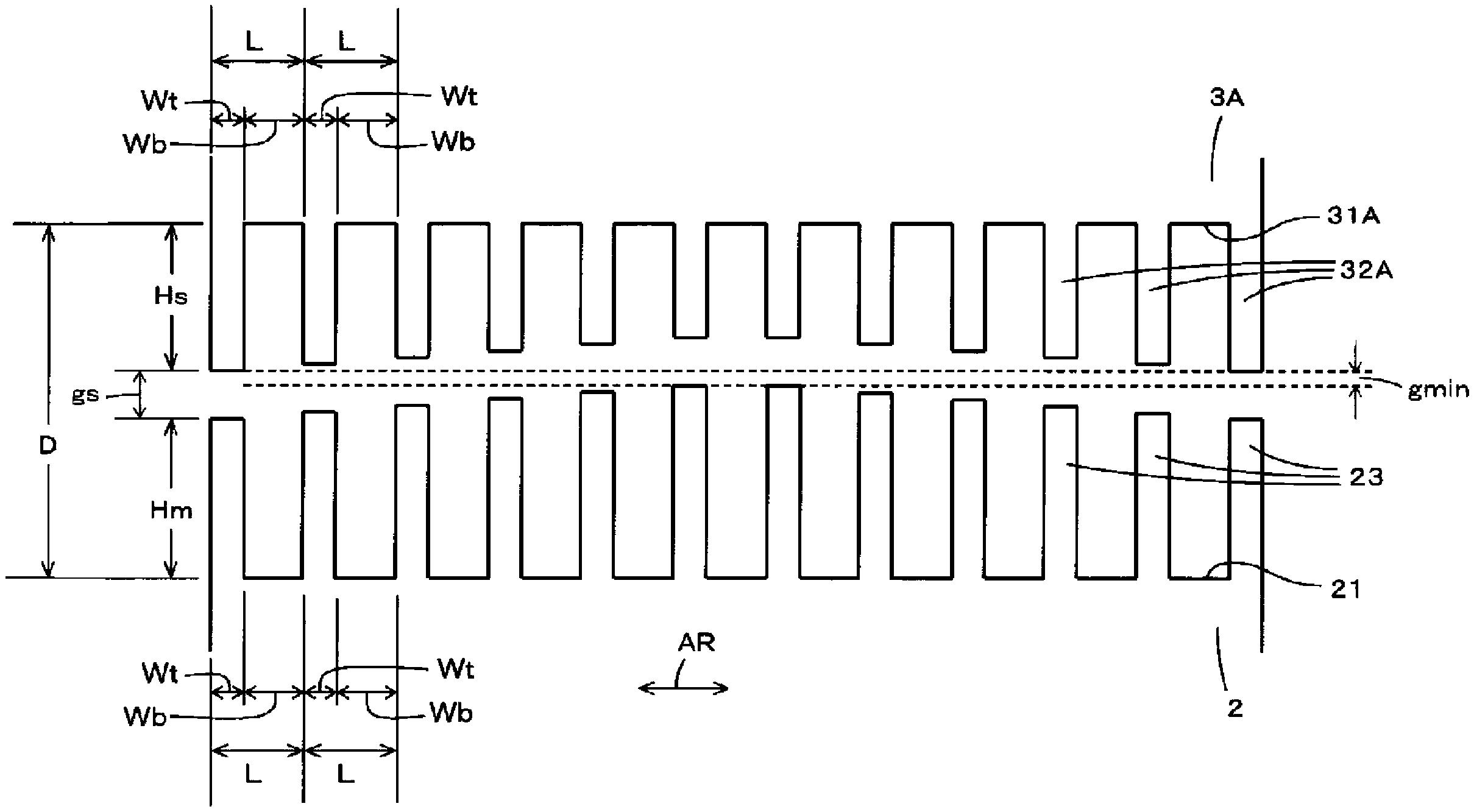
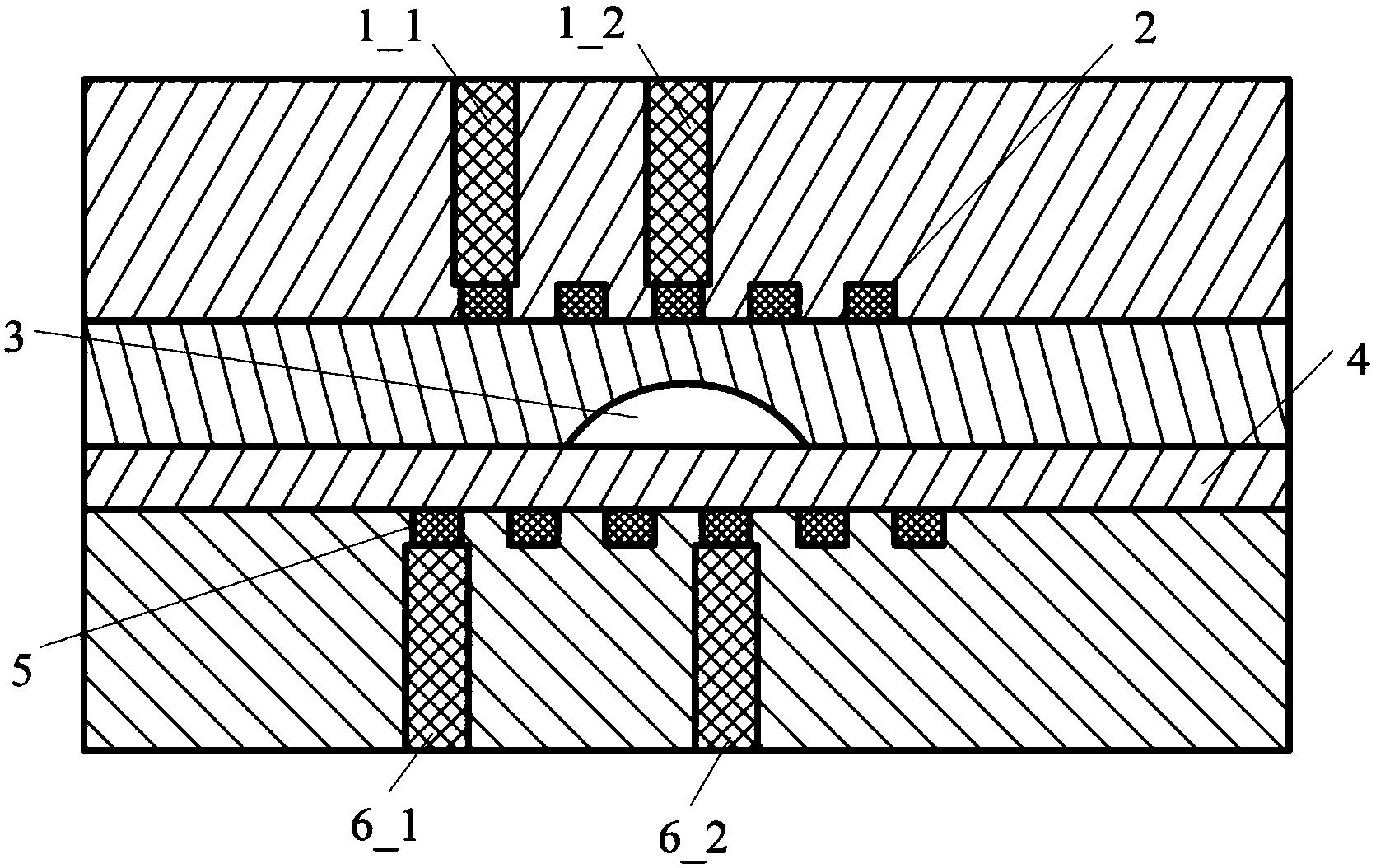
图2A是根据本发明的实施方案的图1A的示例性致动器的固定和移动框架和相互交叉的齿的相关联部分的局部放大细节图,其示出了在展开之前框架和齿的相对位置。
图2B是根据本发明的实施方案的图2B的示例性致动器的固定和移动框架和相互交叉的齿的相关联部分的局部放大细节平面图,其示出了在展开之后框架和齿的相对位置。
图3是根据本发明实施方案的正在相对于其固定框架移动的致动器的移动框架的示意图,其具有一阶平行运动和二阶弧形运动。
图4是根据本发明实施方案的类似于图2A的局部放大细节图,其示出了图1B的示例性致动器的固定和移动框架和相互交叉的齿的相关联部分,示出了在一个操作模式中在关闭行程期间移动框架相对于固定框架的运动方向。
图5是根据本发明实施方案的在致动器的全行程期间示例性致动器的移动框架的横向位移-其纵向位移的图。
图6是根据本发明实施方案的在致动器的全行程期间另一个示例性致动器的移动框架的横向位移-其纵向位移的图。
图7是根据本发明实施方案的在致动器的全行程期间根据本发明一个或多个实施方案配置的致动器的移动框架的横向位移-其纵向位移的图。
图8是根据本发明实施方案的示例性静电致动器的示意性俯视图,其中齿和相关联的框架部分被省略,该图示出了通过一对平行运动屈曲部耦联到固定框架的移动框架。
图9是类似于图7的图,示出了在致动器的全行程期间根据本发明一个或多个实施方案配置的另一个示例性致动器的移动框架的横向位移-其纵向位移。
具体实施方式
本发明提供了用于控制静电致动器的梳状驱动器中的弧形运动的方法和装置的各种实施方案,这些方法和装置是可靠的、廉价的和在致动器制造过程中容易实施的。
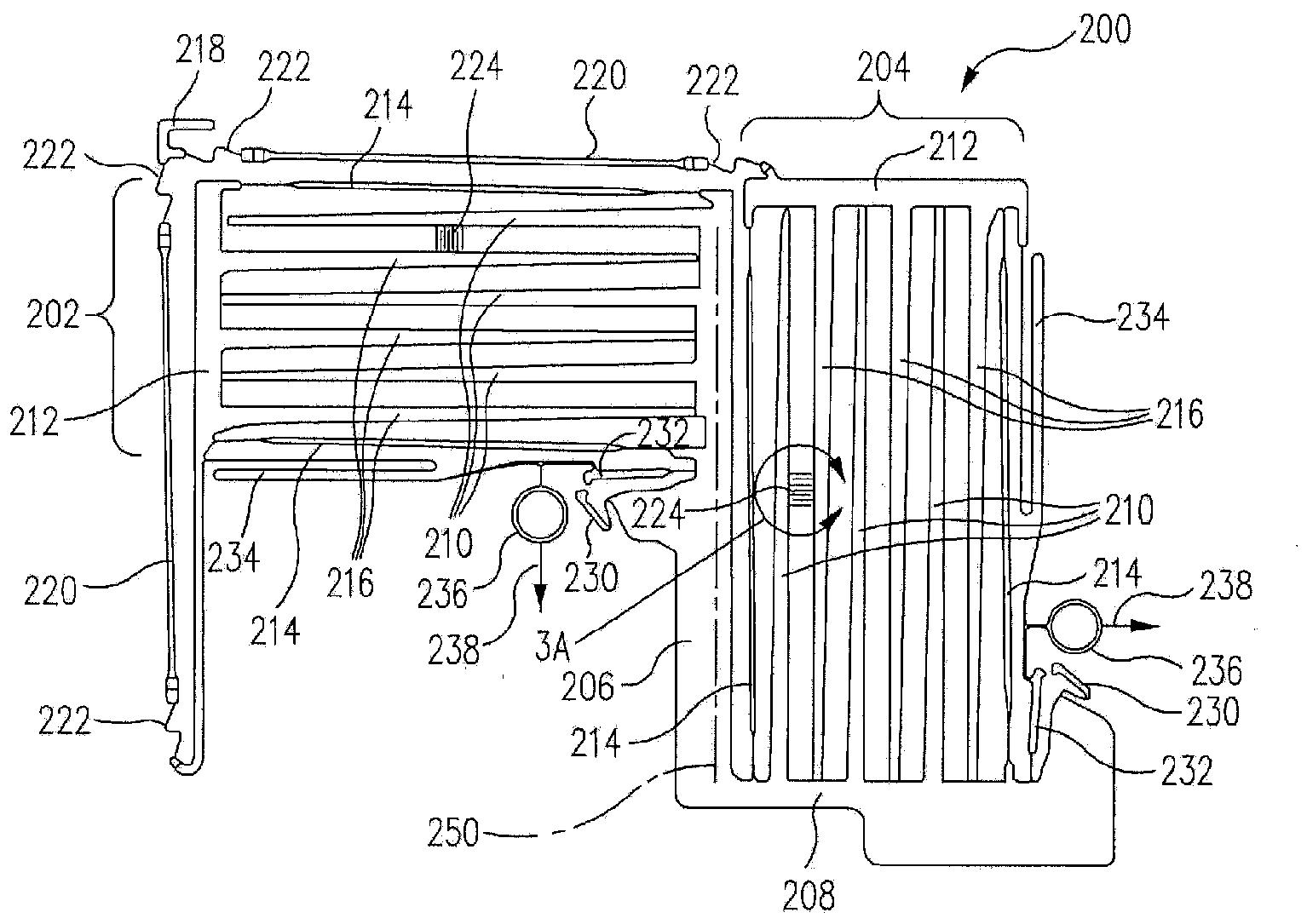
图1A是静电梳状驱动器MEMS致动器100的示例性实施方案的俯视图,其被表示为处于制造状态中且在其展开以便操作使用之前,图1B是示例性的致动器设备100的俯视图,其被表示为处于被展开以便使用之后。
如在图1A和1B中可以看到的,移动框架102通过一对细长的平行运动屈曲部106耦联到固定框架104,平行运动屈曲部106被如此安排和配置以便使移动框架102能以缩放仪的方式基本上平行于固定框架104移动。
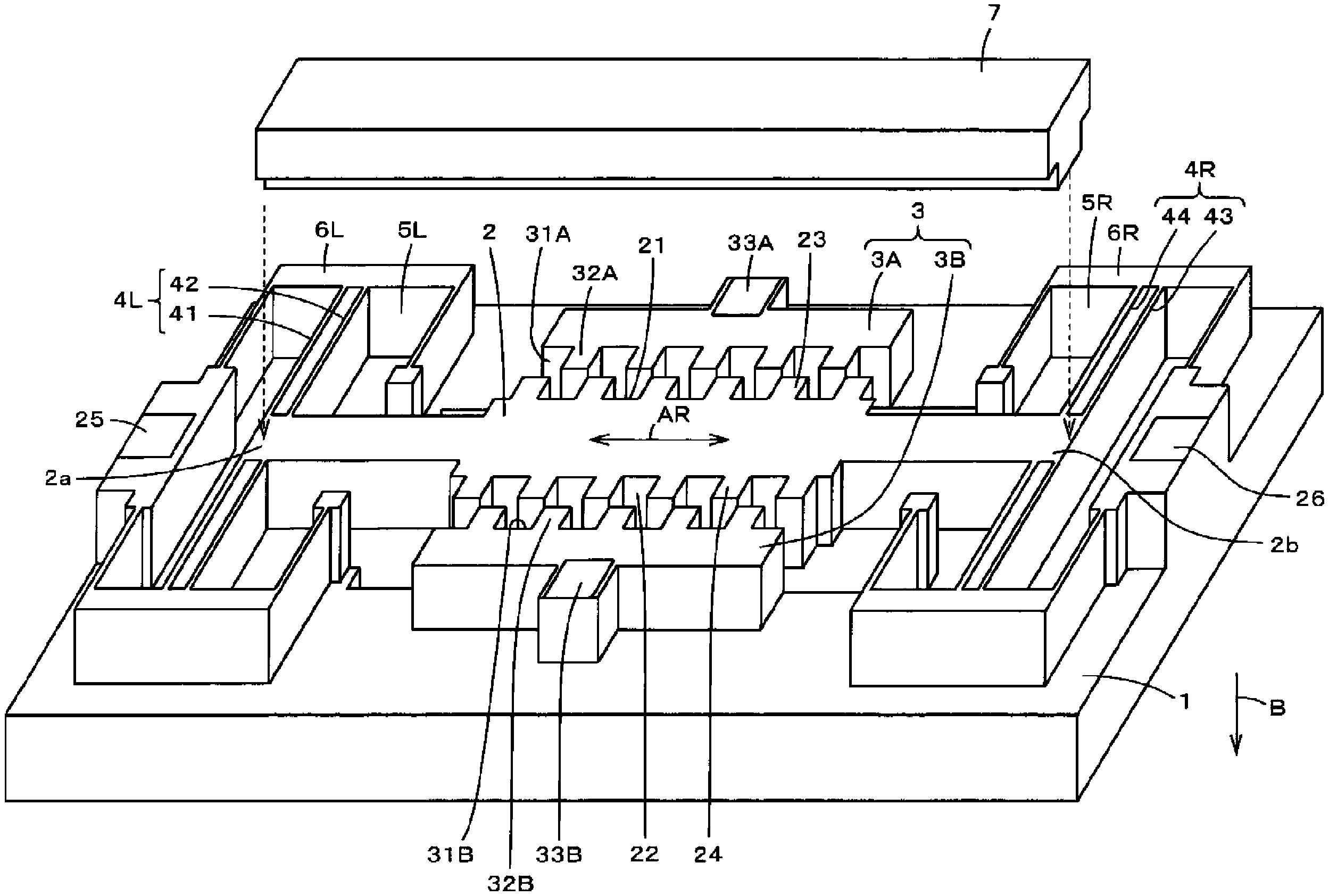
如在图1A和1B中进一步示出的,每个固定和移动框架104和102包括从其垂直伸出的相关联的多个静电梳状驱动器“指”或“齿”108,它们彼此相互交叉以限定静电梳状驱动器“组”。当差分致动电压被选择性地施加到致动器100的梳状驱动器组的固定和移动框架104和102时,固定和移动框架204和102各自的齿108垂直地朝向或远离彼此移动,使移动框架102平行于固定框架104移动,即沿图1B中看到的双箭头110的方向移动。
在图1A和1B中所示的特定的示例性实施方案中,致动器100包括三个静电梳状驱动器组。然而,应该理解的是,这取决于即将到来的特定应用,梳状组的数量以及梳状组的齿108的数量、长度、宽度和齿距可以广泛地变化。
应当进一步理解的是,如上所述,致动器100的相互交叉的齿108在图1B中被表示为处于“展开”位置中,即彼此分开,以便相对于彼此进行基本上垂直的、直线的运动。然而,如在图2A中的齿108的放大细节图中所示,可以看出,在例如硅晶片上且利用晶片级光刻技术的制造过程中,由于制造的原因,致动器100的相互交叉的齿108最初设置在完全“关闭”的位置中,从而使相关联的固定和移动框架104和102彼此间隔开大约齿108长度的距离。因此,在这个配置中向齿108应用电压差将不会导致移动框架102朝向固定框架104的任何进一步的面内直线运动,因此,为了实现直线类型的运动,致动器100必须首先被“展开”成能实现该类型致动的构形。
在图1A和1B的特定示例性实施方案中,这个展开可以包括在固定框架104上提供越过中心的闩锁件112。闩锁件112例如利用弹性屈曲部可枢转地耦联到固定框架104。细长的展开杠杆116的外端利用另一个弹性屈曲部118枢转地耦联到固定框架104,该展开杠杆116的内端偶联到向后弯曲的展开屈曲部120的端部。展开屈曲部120的另一端偶联到移动框架102。展开杠杆116具有设置在其内端的表面,其配置为倾斜平面以便闩锁件112的凸轮方式致动并且与闩锁件112越过中心地闩锁接合。拉环122可以通过与展开杠杆116内端相邻布置的弹性屈曲部124附接到展开屈曲部120。
在展开过程中,力被沿图1A中箭头126的方向施加到致动器110的拉环122,这使展开杠杆116相对于固定框架104旋转。展开杠杆116的旋转使展开屈曲部120直线地且垂直地推动移动框架102远离固定框架104,并到达图1B中所示的展开位置,在此处展开杠杆116内端的凸轮表面首先致动闩锁件112,即促使它枢转远离固定框架104,然后被闩锁件112接合以便将移动框架104保持在展开位置中,如图1B中所示。这又导致移动框架102的齿108展开到由图2B的放大细节图中的点划线126所示的位置,以相对于固定框架104的齿108沿由图2B中的双箭头128所示的方向移动。然后,展开杠杆116可以例如通过粘合剂永久地固定到闩锁件112以防止移动框架102和相关联的移动齿108由于作用在致动器设备200上的振动或震动回到图1A中所示的它们之前的、“非展开”位置。
图3是致动器100的移动框架102相对于固定框架104移动的轨迹的示意图,其受两个平行运动屈曲部106约束。如图1A和1B中所示,每个屈曲部106包括细长杆或棒,其相对两端分别由“实心铰链(solidhinge)”130铰接到固定和移动框架102和104,以便相对于固定框架104进行弧形运动。平行运动屈曲部106可以近似为线性弹簧,而且它们的纵向与横向尺寸的纵横比,以及它们在那些方向上各自的刚度,是如此之大,以致它们可以被认为在弧形轨迹的径向方向上是基本上刚性的,即,移动台架102的动作将刚性地跟随屈曲部106的弧形轨迹。
如图3中所示,由于上述安排,移动框架102相对于固定框架106的面内运动将包括两个分量,即,如双箭头302所示的所希望的一阶平行运动,和如双箭头304所示的不希望的二阶弧形分量。弧形分量304本身表现为移动框架102的齿108相对于固定框架104的齿108的横向运动,即,在图4的X方向上。此外,如图3中所示,在从如图2A中所示的齿108的完全关闭位置,或制造位置,移动至如图2B中所示的完全打开位置,或展开位置时,每个屈曲部106横跨的弧角度为α=αC+αO,如相对于屈曲部106的位置所测量的,该位置垂直于固定和移动框架102和104,如图3中所示。
如上所讨论的,齿108的甚至非常小的相对横向运动都可以不利地影响静电致动器的性能,不但是在所谓的“转换系数”方面,即,所施加的致动电压与所得到的作用在移动框架上的纵向力之比,而且是在“咬合”效果方面,即,在被通电并被足够接近地放置时,相互交叉的齿108彼此咬合接触的倾向,这可能会导致齿的不足和致动器的“停机”,或当致动器的静电控制系统在开和关之间振荡时齿108的“颤动”。在各种实施方案中,足够的横向位移可能引入与纵向致动相反的摩擦力,即使没有出现显著的咬合。
在一些实施方案中,当由框架之间的电压差引发的致动器的纵向力小于在与纵向力相反的方向上施加的平行屈曲部和/或展开屈曲部的弹性力时,致动器的“停机”可能会发生。例如,纵向力可以取决于移动框架和/或致动器的静电驱动器的齿的横向位移(例如,如图2A和2B中所示),从而使横向位移减小由特定电压引起的纵向力,并随着齿越来越多地重叠(例如,朝着图2A中所示的关闭位置移动),减小它的量越来越大。
一般而言,由于横向位移的有害效果随着齿接近完全插入而增大,所以设计特征可以适应本发明的实施方案以例如当齿和/或框架在完全插入位置中附近时(例如,图2A),和/或在对应于最高施加电压的纵向位置时,最小化该横向位移(例如,使得相邻的齿在整个梳状驱动器上将近彼此等距)。照此,可以预期的是,根据特定的应用需求,本发明的实施方案可以适合于成形致动器的转换曲线(例如,代表致动器对施加电压的响应的曲线,其作为纵向距离和/或致动器的行程的函数)。在一些实施方案中,这样的成形可以包括根据一个或多个平行屈曲部制造角度(例如,远离且垂直于一个和/或多个相邻的框架而测量的,其中例如相对于固定框架的制造角度可以不同于相对于移动框架的制造角度),和/或根据例如在展开和/或制造位置的特定的所需横向位移(例如,在相邻的齿之间相对于等距位置所测量的),来制造致动器。在各种实施方案中,成形该转换曲线可以与成形致动器的弧形轨迹相当,如本文中所述的。
纵向位移、横向位移、施加的电压差和不同屈曲部的弹性力的相互关系的一般理解,可以得自于典型梳状驱动器的势能的下列等式:
其中各种符号可从下表中理解:
如图4中所示,在一个示例性实施方案中,如果假定致动器在y方向上具有约130μ(130微米或130X10-6米)的“打开行程”,即移动框架102从完全打开或展开位置移动到完全关闭位置的移动长度,并且平行运动屈曲部106的长度为约2.5毫米(mm),则移动齿108相对于固定齿108在图4中的横向或x方向上的仅约0.2μ(即大约650/1的行程长度/横向偏移比)的偏移将会不利地影响致动器性能。
已知的是,通过使用尽可能长的屈曲部106,总体上将弧形运动最小化。然而,根据经验发现,通过以非零的制造角αC制造屈曲部106,可以以在不太重要的区域中的较大的弧形运动为代价,在关心的区域中极大地减小移动框架102的弧形运动。因此,在上述例子中,如果以图3中实线所示的垂直位置制造屈曲部106,则移动框架102的弧形运动将如图5中所示,从完全打开或展开位置(图的右端)移动到完全关闭位置(图的左端)。如可以在图5中看到的,移动框架102,因此与其相关联的齿108,的总横向偏移将是大约3.38μ。由于在该示例性实施方案中,3.38μ大于齿108之间的间隙,所以致动器的齿108将互相干扰,并且因此,y=130mm的完全运动范围是不可能的。
如果以全行程所需的角α的大约一半的角αC,即αC=1/2α,制造屈曲部106,则弧形运动将如图5的图中所示。在此,移动框架102现在可以物理地移动通过y=130mm的其全运动范围,但大约0.85μ的大的横向运动将仍然不利地影响示例性致动器的转换系数,并且因此影响其性能。事实上,具有这个示例性配置的致动器将会在通过其全移动范围的中途“停机”。
但是,如果在上面的示例性实施方案中,屈曲部106被以小于全范围行程α的一半的角αC制造,特别是以 的角度,则移动框架102的弧形运动将如图7的图中所示。如图7中可以看到的,框架102的横向位移被平衡到齿108之间的标称间隙的两侧,即每侧大约0.58μ,因此对于给定的屈曲部长度和行程提供了最小的横向偏移。
如本领域技术人员将会理解的,其他的最优情况也是可能的。例如,由于图5-7的曲线的右侧部分代表“低致动电压”侧,即,当齿108被布置在它们的相对不通电的打开或展开位置中时,甚至更多的横向偏差可能是可以容忍的。在这种情况下,全范围角α的不同部分可以用于屈曲部106的制造角αC,如在下面的例子中讨论的。
图8是另一个示例性静电致动器100的示意性平面图,其中为了说明的目的,齿108和移动和固定框架102和104的相关联部分被省略。为该特定的示例性实施方案设想的有关参数在下表中给出:
如可从表中确定的,制造或关闭角αC为约0.32倍的全行程角度α。这导致图9中所示的移动框架102的弧形运动,其中可以看出,大约-8X10-4mm的最大负横向位移出现在上面描述的齿108的打开,或“低电压,”位置处,和大约+2.1X10-4的最大的最大正横向位移(其是最大负位移的大约四分之一)出现在全行程长度Y=0.120mm的约三分之二的位移处。因此,从前述内容可以看到,通过相对于图3中所示的传统的制造垂直位置以角αC制造平行屈曲部106,所述αC小于在全行程期间屈曲部106的总角度偏移α的大约一半,特别是,以在该角度的约0.32至约0.42倍之间的角度制造平行屈曲部106,可以以在可能更容易耐受弧形运动的不太关键的区域,即低致动电压区域中的较大弧形运动为代价,在其行程的关键区域,或高致动电压区域中极大地减小移动框架102的弧形运动。
图7的示例性移动框架102X-Y位移曲线经不起封闭项的数学表达式的检验,但可以通过曲线拟合技术来精密估计。因此,如果(X,Y)是移动框架102从展开位置至制造位置的位移,则框架的轨迹可以通过泰勒展开式的前五项描述:
X=a0+a1Y+a2Y2+a3Y3+a4Y4,
其中参数a0-a4具有下表中列出的值:
在本发明的各种实施方案中,类似的方法学可用于其它类型的限定运动的屈曲部而不是本文所描述的平行运动屈曲部。此外,可以想到其他的修改。例如,在一些实施方案中,制造位置可以是展开位置(例如,图2B)和完全关闭位置(例如,图2A)之间的和/或包括该展开位置和该完全关闭位置的任何位置。
根据上述描述,显然,可以对本发明的用于控制静电致动器中的弧形运动的方法和装置作出许多改变、替换和变化,并且据此,本发明的范围不应局限于本申请中所示的和所描述的特定实施方案的范围,因为它们仅仅是作为一些例子,而应与下文中所附的权利要求及其在功能上等价的范围完全相当。
静电致动器中的弧形运动控制专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0