







专利摘要
本实用新型提供了一种可协同操作的光镊微结构,包括两个或两个以上的光镊微结构,各光镊微结构包括:第一操纵部、第一球体、第二球体、第二操纵部和多个连接杆,所述第一操纵部、第一球体、第二球体、第二操纵部依次通过各连接杆连接;所述第一球体、第二球体均通过光镊进行驱动,所述第一操纵部、第二操纵部均用于搬运微尺度物体。本实用新型通过光刻胶材料,制成了一种结构简单、适合多光镊操纵的可协同操作的光镊微结构,其可以通过全息多光镊装置进行操纵,计算机程序辅助进行控制,尤其适合于搬运液体环境中的长条形微尺度物体,可实现物体的平稳搬运和旋转,是一种理想的微尺度物体操纵工具。
权利要求
1.一种可协同操作的光镊微结构,其特征在于,包括两个或两个以上的光镊微结构,各光镊微结构包括:第一操纵部、第一球体、第二球体、第二操纵部和多个连接杆,所述第一操纵部、第一球体、第二球体、第二操纵部依次通过各连接杆连接;所述第一球体、第二球体均通过光镊进行驱动,所述第一操纵部、第二操纵部均用于搬运微尺度物体。
2.根据权利要求1所述的可协同操作的光镊微结构,其特征在于,所述第一操纵部、第一球体、第二球体与第二操纵部的中心连线为直线。
3.根据权利要求2所述的可协同操作的光镊微结构,其特征在于,所述第一操纵部、第二操纵部为矩形推板,并且所述矩形推板垂直于所述第一操纵部、第一球体、第二球体与第二操纵部的中心连线。
4.根据权利要求3所述的可协同操作的光镊微结构,其特征在于,各连接杆均为方形杆。
5.根据权利要求4所述的可协同操作的光镊微结构,其特征在于,所述矩形推板为5*5μm的正方形,矩形推板的板厚度为1μm;所述方形杆为1*1μm的正方形。
6.根据权利要求1所述的可协同操作的光镊微结构,其特征在于,所述连接杆包括连接第一操纵部、第一球体的第一连接杆,连接第一球体、第二球体的第二连接杆,以及连接第二球体与第二操纵部的第三连接杆;第一连接杆、第二连接杆分别嵌入第一球体的两端,第二连接杆、第三连接杆分别嵌入第二球体的两端。
7.根据权利要求6所述的可协同操作的光镊微结构,其特征在于,所述第一球体、第二球体的直径为4μm,第一操纵部至第一球体的球心距离为5μm,第一球体的球心至第二球体的球心距离为7μm,第二操纵部至第二球体的球心距离为5μm。
8.根据权利要求1所述的可协同操作的光镊微结构,其特征在于,各光镊微结构的材料为IP-L 780光刻胶,并通过全息多光镊装置进行操作。
9.根据权利要求1所述的可协同操作的光镊微结构,其特征在于,通过两个或两个以上光镊微结构协同操作,完成液体环境中的长条形微尺度物体的搬运。
说明书
技术领域
本实用新型涉及微操作领域,尤其是一种可协同操作的光镊微结构,可用于操作液体环境中几微米到几十微米大小的长条形物体,实现物体的搬运和旋转。
背景技术
利用一束高会聚激光形成的光学势阱可实现生物微粒、胶体颗粒等微尺度物体的捕获,被人们形象地称为“光镊”。自1986年发明以来,光镊在生物、医学、物理、材料等领域得到了广泛的应用。但是,单光镊在某一时刻只能操作一个物体,随着应用的逐步深入,其局限日益凸显,因此,人们开始寻求可同时产生和控制多个光镊的多光镊技术。全息光镊主要采用液晶空间光调制器,通过计算机程序控制空间光调制器实现对光场的调制,振幅和相位分布经过调制的光束传输到物镜,可在不同位置形成多个光镊。通过刷新程序和空间光调制器,可对多个光镊的位置进行单独控制,进而实现对多个物体的同时操作。
但传统的高斯光光镊尚有一些局限性没有很好地克服,比如:
1.光镊利用激光透过物体发生折射时的梯度力来捕获物体,因此只能用于操作透明物体;
2.高斯光光镊难以产生和控制角动量,因为难以用于长条形物体的平稳搬运和旋转。
实用新型内容
本发明的目的在于提供一种可协同操作的光镊微结构,利用多光镊对两个或两个以上的光镊微结构进行协同操作,可实现对长条形微尺度物体的平稳搬运和旋转。
本实用新型是这样实现的:
一种可协同操作的光镊微结构,包括两个或两个以上的光镊微结构,各光镊微结构包括:第一操纵部、第一球体、第二球体、第二操纵部和多个连接杆,所述第一操纵部、第一球体、第二球体、第二操纵部依次通过各连接杆连接;所述第一球体、第二球体均通过光镊进行驱动,所述第一操纵部、第二操纵部均用于搬运微尺度物体。
作为本实用新型的进一步改进,所述第一操纵部、第一球体、第二球体与第二操纵部的中心连线为直线。
作为本实用新型的进一步改进,所述第一操纵部、第二操纵部为矩形推板,并且所述矩形推板垂直于所述第一操纵部、第一球体、第二球体与第二操纵部的中心连线。
作为本实用新型的进一步改进,各连接杆均为方形杆。
作为本实用新型的进一步改进,所述矩形推板为5*5μm的正方形,矩形推板的板厚度为1μm;所述方形杆为1*1μm的正方形。
作为本实用新型的进一步改进,所述连接杆包括连接第一操纵部、第一球体的第一连接杆,连接第一球体、第二球体的第二连接杆,以及连接第二球体与第二操纵部的第三连接杆;第一连接杆、第二连接杆分别嵌入第一球体的两端,第二连接杆、第三连接杆分别嵌入第二球体的两端。
作为本实用新型的进一步改进,所述第一球体、第二球体的直径为4μm,第一操纵部至第一球体的球心距离为5μm,第一球体的球心至第二球体的球心距离为7μm,第二操纵部至第二球体的球心距离为5μm。
作为本实用新型的进一步改进,各光镊微结构的材料为IP-L 780光刻胶,并通过全息多光镊装置进行操作。
作为本实用新型的进一步改进,通过两个或两个以上光镊微结构协同操作,完成液体环境中的长条形微尺度物体的搬运。
与现有技术相比,本实用新型的有益效果是:本实用新型通过光刻胶材料,制成了一种结构简单、适合多光镊操纵的可协同操作的光镊微结构,其可以通过全息多光镊装置进行操纵,计算机程序辅助进行控制,尤其适合于搬运液体环境中的长条形微尺度物体,可实现物体的平稳搬运和旋转,是一种理想的微尺度物体操纵工具。
附图说明
图1是本实用新型提供的一种可协同操作的光镊微结构(单个光镊微结构)的立体结构示意图。
图2是本实用新型提供的一种可协同操作的光镊微结构(单个光镊微结构)的正视图。
图3是本实用新型提供的一种可协同操作的光镊微结构(单个光镊微结构)的左视图。
图4是本实用新型提供的一种可协同操作的光镊微结构(两个光镊微结构)的立体结构示意图。
图5是本实用新型提供的一种全息光镊装置的工作过程示意图。
图6是本实用新型提供的一种可协同操作的光镊微结构的第一种操作方案示意图。
图7是本实用新型提供的一种可协同操作的光镊微结构的第一种操作方案的受力分析侧视图。
图8是本实用新型提供的一种可协同操作的光镊微结构的第一种操作方案的受力分析俯视图。
图9是本实用新型提供的一种可协同操作的光镊微结构的第二种操作方案示意图。
附图标记说明:100-光镊微结构,1-第一操纵部,2-第一球体,3-第二球体,4-第二操纵部,5-第一连接杆,6-第二连接杆,7-第三连接杆,201-激光器,202-扩束器,203-透镜,204-反光镜,205-空间光调制器,206-二向色性反射镜,207-物镜,208-显微镜载物台,209-照明灯,210-计算机,211-CCD图像传感器,300-长条细胞。
具体实施方式
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面结合附图及具体实施例对本实用新型进一步说明。
实施例1
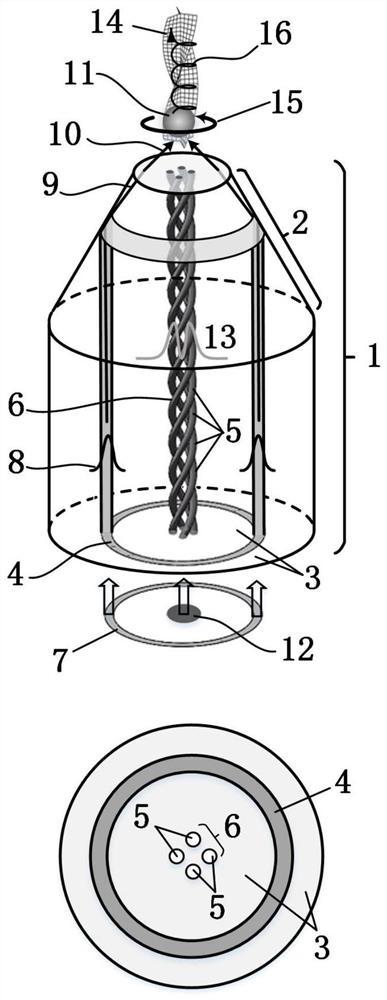
如图1-4所示的一种可协同操作的光镊微结构,包括两个或两个以上的光镊微结构100,各光镊微结构100包括:第一操纵部1、第一球体2、第二球体3、第二操纵部4和多个连接杆,所述第一操纵部1、第一球体2、第二球体3、第二操纵部4依次通过各连接杆连接;所述第一球体2、第二球体3均通过光镊进行驱动,所述第一操纵部1、第二操纵部4均用于搬运微尺度物体,尤其是液体环境中的长条形微尺度物体的平稳搬运(如长条细胞)。
使用时,利用光镊装置形成多个三维梯度光阱,分别作用于上述两个或两个以上的光镊微结构100的其中一个球体上,由于光具有动量,因此球体可以在光镊装置的驱动下发生位置变化,带动操纵部移动,对微尺度物体进行操纵。
采用上述的光镊微结构,其结构简单,由于具有两个可以驱动的球体,因此可以轻易改变整个光镊微结构的受力方向,从而灵活操纵两个操纵部。
优选的,所述第一操纵部1、第一球体2、第二球体3与第二操纵部4的中心连线为直线。
优选的,所述第一操纵部1、第二操纵部4为矩形推板,并且所述矩形推板垂直于所述第一操纵部1、第一球体2、第二球体3与第二操纵部4的中心连线。采用此技术方案,由于采用了矩形推板,整个光镊微结构不容易侧翻,实现了物体的平稳搬运和旋转。
优选的,各连接杆均为方形杆;所述连接杆包括连接第一操纵部1、第一球体2的第一连接杆5,连接第一球体2、第二球体3的第二连接杆6,以及连接第二球体3与第二操纵部4的第三连接杆7;第一连接杆5、第二连接杆6分别嵌入第一球体2的两端,第二连接杆6、第三连接杆7分别嵌入第二球体的两端。各连接杆用于光镊微结构的球体部分和操纵部部分的支撑和连接。
上述的光镊微结构的尺寸优选如下:
所述矩形推板为5*5μm的正方形,矩形推板的板厚度为1μm;所述方形杆为1*1μm的正方形。所述第一球体2、第二球体3的直径为4μm,整个光镊微结构的中心连线(不包含矩形推板的厚度)长度为17μm,分别包括:第一操纵部1至第一球体2的球心距离为5μm,第一球体2的球心至第二球体3的球心距离为7μm,第二操纵部3至第二球体4的球心距离为5μm。
进一步的,各光镊微结构100的材料为IP-L780光刻胶。
光刻胶是指一大类具有光敏化学作用(或对电子能量敏感)的高分子聚合物材料;又叫抗蚀剂,也叫光阻剂,英文名称为resist。采用IP-L780光刻胶制成的光镊微结构,对全息多光镊装置发射的高斯光更加敏感;基于双光子激光直写技术制备,从而提高本实用新型的成品精度。
采用上述所有的优选技术方案,获得如图4所示的两个光镊微结构,在实验室条件下进行了验证,发现本实用新型的结构简单,尺寸合理,移动灵活,尤其适合于搬运长条形微尺度物体,搬运过程平稳,受力均匀,不容易侧翻。
实施例2
本实施例提供一种可协同操作的光镊微结构(图4)的操作方法。
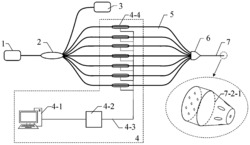
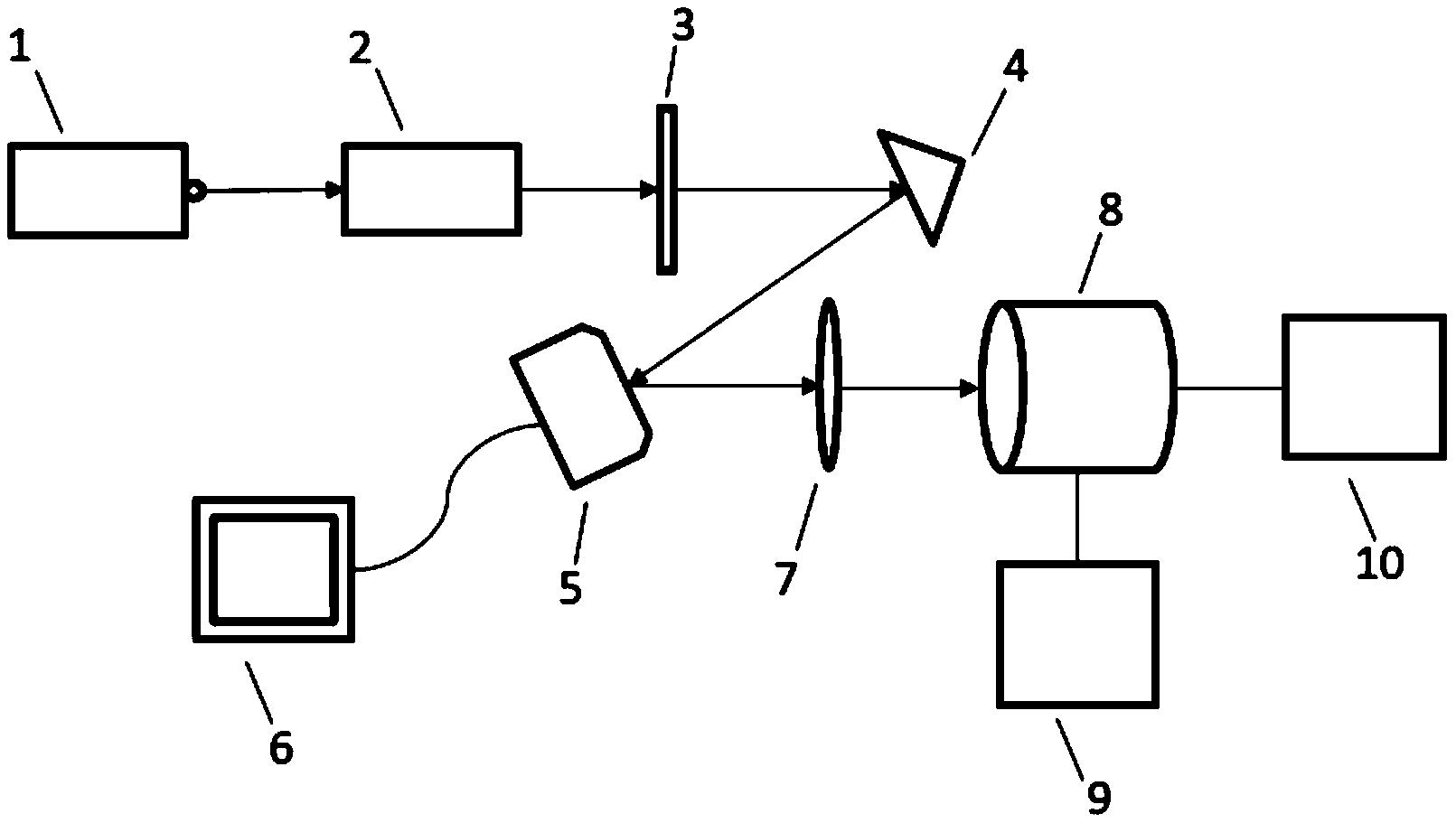
首先介绍一种全息多光镊装置,如图5所示:依次包括激光器201、扩束器202、透镜 203、反光镜 204、空间光调制器205、二向色性反射镜206、物镜 207、显微镜载物台208、照明灯209、计算机 210和CCD图像传感器211。
其工作原理为:从激光器201发射出的激光通过扩束器202,将平行输入的激光束扩大成直径更大的平行光束后,经过透镜203聚焦并通过反射镜204反射进入空间光调制器205,空间光调制器205可以将激光束调制成不同数量的光阱,调制后的光束由线性光变为高斯光。调制后的光阱通过二向色性反射镜206可以将激光束反射至物镜207,最终到达显微镜载物台208上。显微镜载物台208上放有实施例1所涉及的可协同操作的光镊微结构(图4)以及被操作的长条细胞300。CCD图像传感器211连接至计算机210上,可用于实时观测操纵效果,照明灯209提供照明条件。
采用全息多光镊装置,配合计算机程序控制的多光镊操作,本实用新型作用于长条形微尺度物体,实现了微尺度物体尤其是长条状微尺度物体的平稳搬运和旋转,计算机控制的摄像头实现操作过程的记录和监控,确保操作过程的可靠性。
实施例3
本实施例通过图6-9对实施例2的全息多光镊装置的操纵结构进行受力分析。
可协同操作的光镊微结构用于搬运长条细胞300的第一种操作方案如图6所示。
如图6-8所示,全息多光镊装置生成若干数量的光镊,将其作用于可协同操作的光镊微结构上,各光镊微结构100被光镊的梯度力所捕获。在水平方向上,光镊微结构100受到光镊的拉力F1、长条细胞300作用于光镊微结构100上的阻力F3以及液体环境对微结构和长条细胞产生的阻力F2和F4,当光镊的拉力F1大于上述所有阻力F3+ F2+F4之和时,光镊微结构100会在光镊的拉力作用下而移动,进而由操作部(矩形推板)推动长条细胞300,实现对长条细胞300的搬运操作。
可协同操作的光镊微结构用于搬运长条细胞300的第二种操作方案如图9所示。第二种操作方法的区别在于,两个光镊微结构分别处于长条细胞300的两侧,采用这种操作方法,可以快速调整长条细胞300的方向。
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
一种可协同操作的光镊微结构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0