







专利摘要
本发明公开了一种基于重力梯度极值点的潜艇位置探测方法,潜艇模型由半球形头部、圆柱形中部、圆锥形尾部和内部的圆柱形耐压舱组成,以潜艇圆柱形中部的形心为坐标原点,指向艇艏方向为X轴正向,左舷为Y轴正向,竖直向上为Z轴正向,建立空间直角坐标系,所述探测方法如下:根据中心极值点的位置,以及梯度张量非对角分量极值点之间的中心位置,即可确定潜艇的水平位置,即坐标(X,Y);利用潜艇模型确定深度与重力梯度极值点的函数关系;本发明的有益效果是:能够准确的确定出潜艇所在的三维位置,方法的稳健性较好,在较为复杂的环境下仍然可以运用;可以利用梯度分量的多个极值点联合解算。
权利要求
1.一种基于重力梯度极值点的潜艇模型位置探测方法,其特征在于:潜艇模型由半球形头部(1)、圆柱形中部(4)、圆锥形尾部(3)和内部的圆柱形耐压舱(2)组成,以潜艇模型圆柱形中部(4)的形心为坐标原点,指向艇艏方向为X轴正向,左舷为Y轴正向,竖直向上为Z轴正向,建立空间直角坐标系,所述探测方法如下:
步骤一:根据中心极值点的位置,以及梯度张量非对角分量极值点之间的中心位置,确定潜艇模型的水平位置,即坐标(X,Y);
步骤二:利用潜艇模型到观测点垂直距离与极值点坐标的关系;
步骤三:根据观测得到的重力梯度的极值点来反推出潜艇模型的深度并转到相应坐标系中得到Z;
步骤四:综合步骤一和步骤三的结果得到(X,Y,Z)。
2.根据权利要求1所述的一种基于重力梯度极值点的潜艇模型位置探测方法,其特征在于:所述潜艇模型产生的重力梯度分为两部分:一部分为潜艇模型外壳产生的重力梯度,另一部分为潜艇模型圆柱形耐压舱(2)引起的质量亏损而产生的重力梯度。
3.根据权利要求1所述的一种基于重力梯度极值点的潜艇模型位置探测方法,其特征在于:随着潜艇模型深度的变化,特定高度处重力梯度各分量极值点的水平坐标亦会发生变化。
4.根据权利要求1所述的一种基于重力梯度极值点的潜艇模型位置探测方法,其特征在于:潜艇模型到观测点的垂直距离从100m到1000m,每间隔50m形成极值点坐标。
5.根据权利要求1所述的一种基于重力梯度极值点的潜艇模型位置探测方法,其特征在于:所述步骤二中利用多个极值点坐标联合解算。
说明书
技术领域
本发明属于潜艇位置探测技术领域,具体涉及一种基于重力梯度极值点的潜艇位置探测方法。
背景技术
在重力场的各元素中,重力梯度是重力位的二阶导数,能够反映重力场在空间内的变化率,具有比重力更好的分辨率,在探测浅层物体方面更具有优势。经过多年的发展,重力梯度仪目前精度已经可以达到10-4E,未来的超导重力梯度仪精度可以达到10-6E。利用高精度的重力梯度数据进行潜艇探测具有很强的可行性。
目前已经有不少学者进行了利用重力梯度探测物体的轮廓、位置和质量的研究。有学者利用重力梯度探测水下障碍,从而提高潜艇在水下航行时的安全性;有学者研究了利用航空重力梯度测量探测潜艇的可行性;有学者指出通过重力梯度在水平方向上的极值点可以确定物体的形状及水平位置;有学者提出了一种利用重力梯度不变量估计物体的深度的方法;有学者提出了一种利用张量欧拉反卷积估计地下物体的位置的方法;有学者提出利用重力梯度张量及重力梯度张量的特征值确定物体的位置;不少学者还研究了将物体视为点源,从而利用重力异常和重力梯度反演物体的位置及质量。
为了能够准确的确定出潜艇所在的三维位置,在较为复杂的环境下仍然可以运用,为此我们提出一种基于重力梯度极值点的潜艇位置探测方法。
发明内容
本发明的目的在于提供一种基于重力梯度极值点的潜艇位置探测方法,能够准确的确定出潜艇所在的三维位置,在较为复杂的环境下仍然可以运用。
为实现上述目的,本发明提供如下技术方案:一种基于重力梯度极值点的潜艇位置探测方法,潜艇模型由半球形头部、圆柱形中部、圆锥形尾部和内部的圆柱形耐压舱组成,以潜艇圆柱形中部的形心为坐标原点,指向艇艏方向为X轴正向,左舷为Y轴正向,竖直向上为Z轴正向,建立空间直角坐标系,所述探测方法如下:
步骤一:根据中心极值点的位置,以及梯度张量非对角分量极值点之间的中心位置,即可确定潜艇的水平位置,即坐标(X,Y);
步骤二:利用潜艇模型确定深度与重力梯度极值点的函数关系;
步骤三:根据观测得到的重力梯度的极值点来反推出潜艇的深度并转到相应坐标系中得到Z;
步骤四:综合步骤一和步骤三的结果可得到X,Y,Z。
作为本发明的一种优选的技术方案,所述潜艇产生的重力梯度可分为两部分:一部分为潜艇外壳产生的重力梯度,另一部分为潜艇圆柱形耐压舱2引起的质量亏损而产生的重力梯度。
作为本发明的一种优选的技术方案,理论上,随着潜艇深度的变化,特定高度处重力梯度各分量极值点的水平坐标亦会发生变化。
作为本发明的一种优选的技术方案,潜艇到观测点的垂直距离从100m到1000m间隔50m的极值点坐标。
作为本发明的一种优选的技术方案,利用梯度分量的多个极值点联合解算。
与现有技术相比,本发明的有益效果是:
(1)能够准确的确定出潜艇所在的三维位置,方法的稳健性较好,在较为复杂的环境下仍然可以运用;
(2)可以利用梯度分量的多个极值点联合解算。
附图说明
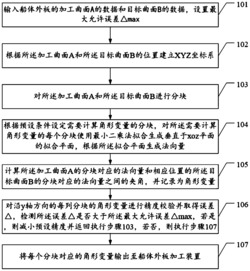
图1为本发明的探测方法流程图;
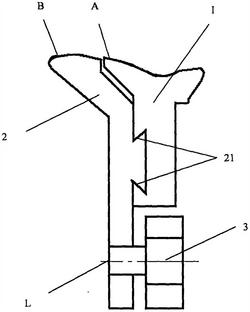
图2为本发明的潜艇模型结构示意图;
图3为本发明的潜艇上方600m处产生的重力梯度六分量(Vxx、Vxy、Vxz、Vyy、Vyz、Vzz)结构示意图;
图4为本发明的潜艇极值点坐标XA1、XA4、XB4、XC4、XA5、XB5和XA6与潜艇到观测点的垂直距离的关系结构示意图一;
图5为本发明的潜艇极值点坐标YA1、YB1、YC1、YA3、YB3、YA4和YA6与潜艇到观测点的垂直距离的关系结构示意图二;
图6为本发明的潜艇极值点坐标XB1、XA2、XB2和XA3与潜艇到观测点的垂直距离的关系结构示意图三;
图7为本发明的潜艇极值点坐标YA2、YC2、YB4和YA5与潜艇到观测点的垂直距离的关系结构示意图四;
图8为本发明的潜艇极值点坐标XC1、XC2、XD2和XB3与潜艇到观测点的垂直距离的关系结构示意图五;
图9为本发明的潜艇极值点坐标YB2、XD2、YC4和YB5与潜艇到观测点的垂直距离的关系结构示意图六;
图中:1、半球形头部;2、圆柱形耐压舱;3、圆锥形尾部;4、圆柱形中部。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1、图2、图3、图4、图5、图6、图7、图8、图9,本发明提供一种技术方案:一种基于重力梯度极值点的潜艇位置探测方法,潜艇模型由半球形头部1、圆柱形中部4、圆锥形尾部3和内部的圆柱形耐压舱2组成,其中,半球形头部1的半径为13m,圆柱形中部4的长度为149.5m,圆锥形尾部3的长度为15m,圆柱形耐压舱2长121.42m,半径为13m,外壳的面密度为247.58g/cm2,以潜艇圆柱形中部4的形心为坐标原点,指向艇艏方向为X轴正向,左舷为Y轴正向,竖直向上为Z轴正向,建立空间直角坐标系;
潜艇产生的重力梯度可分为两部分:一部分为潜艇外壳产生的重力梯度,另一部分为潜艇耐压舱引起的质量亏损而产生的重力梯度;现不加推导的直接给出外壳、圆柱形耐压舱2产生的6个重力梯度分量,分别由公示(1)和(2)表示:
其中,σ为潜艇外壳面密度,ρ为海水密度,取1.03g/cm3,则最终潜艇的重力梯度为潜艇外壳产生的重力梯度和潜艇耐压舱质量亏损产生的重力梯度之和,即
Vij=V1ij+V2ij(i=x,y;j=x,y)(3)
根据以上可计算出潜艇上方产生的重力梯度;以在潜艇上方600m处为例,观测到的重力梯度如图3所示;
潜艇位置探测方法如下:
步骤一:根据中心极值点的位置,以及梯度张量非对角分量极值点之间的中心位置,即可确定潜艇的水平位置,即坐标(X,Y);
步骤二:利用潜艇模型确定深度与重力梯度极值点的函数关系;
步骤三:根据观测得到的重力梯度的极值点来反推出潜艇的深度并转到相应坐标系中得到Z;
步骤四:综合步骤一和步骤三的结果可得到X,Y,Z。
本实施例中,优选的,理论上,随着潜艇深度的变化,特定高度处重力梯度各分量极值点的水平坐标亦会发生变化。
本实施例中,优选的,潜艇到观测点的垂直距离从100m到1000m间隔50m的极值点坐标,现通过一组数值实验来进行分析,由于重力梯度仪精度的限制,潜艇探测的高度有效范围在1000m,故本发明计算了潜艇到观测点的垂直距离从100m到1000m(间隔50m)的极值点坐标;潜艇到观测点垂直距离与极值点坐标的关系如图4-9所示,其中,图4为XA1、XA4、XB4、XC4、XA5、XB5和XA6随d的变化关系,这些量随d的变化为非线性,且随d的变化幅度较小,故不适合用来反演潜艇深度;图5为YA1、YB1、YC1、YA3、YB3、YA4和YA6随d的变化关系,这些量不随d的变化而变化,故也不适合用来反演潜艇深度;图6为XB1、XA2、XB2和XA3随d的变化关系;图7为YA2、YC2、YB4和YA5随d的变化关系;图8为XC1、XC2、XD2和XB3随d的变化关系;图9为YB2、XD2、YC4和YB5随d的变化关系;图6-图9所述变量皆随d的变化为线性,且随高度的变化较大,故适合反演潜艇深度;利用这些量,本发明进一步地通过最小二乘算法确定了各坐标与之间的相互关系,结果如公式(5-10):
利用公式(5-10),即可由极值点在水平方向上的坐标计算潜艇到观测点的垂直距离;本发明随机选取了6个高度(459m、573m、610m、780m、846m和927m),计算出了潜艇到观测点的垂直距离,结果如表2所示;为验证该算法的稳健性,在极值点坐标中随机加入±5m和±50m的误差,结果如表3、表4所示。
表2无误差时反算出的潜艇到观测点之间的垂直距离/m
表3加入±5m误差后反算出的潜艇到观测点之间的垂直距离/m
表4加入±50m的误差后反算出的潜艇到观测点之间的垂直距离/m
由表2可知,计算出的距离最大误差不超过1m,平均相对误差为0.7%,这表明了利用水平极值点坐标计算潜艇到观测点垂直距离的可行性;由表3可知,在极值点坐标中加入±5m的误差之后,计算出的距离误差最大不超过1.6m,平均相对误差为1.3%;由表4可知,在极值点坐标中加入±50m的误差之后,计算出的距离误差最大不超过13.1m,平均相对误差为11.1%,这说明该方法的稳健性较好,能够在较为复杂的环境运用。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
一种基于重力梯度极值点的潜艇位置探测方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0