







专利摘要
本实用新型公开了一种离焦型光场相机的波前传感器,包括:会聚透镜,用于会聚所述待测波前;微透镜阵列,用于对所述会聚透镜会聚所述待测波前所形成的光斑进行分割,所述微透镜阵列包括多个微透镜单元;CCD探测器,用于接受微透镜阵列对光斑分割后形成的光斑阵列信息,所述微透镜阵列与所述CCD探测器的距离等于所述微透镜单元的焦距;所述微透镜阵列位于与所述会聚透镜的焦点距离为离焦量fdefcous处;所述离焦量为fdefcous=r·n·f,n为微透镜阵列中一个微透镜单元所对应的CCD探测器的像素数,f为微透镜单元的焦距,r表示等效子孔径的光斑占据的微透镜单元个数。
权利要求
1.一种离焦型光场相机的波前传感器,其特征在于,包括:
会聚透镜,用于会聚待测波前;
微透镜阵列,用于对所述会聚透镜会聚所述待测波前所形成的光斑进行分割,所述微透镜阵列包括多个微透镜单元;
CCD探测器,用于接受微透镜阵列对光斑分割后形成的光斑阵列信息,所述微透镜阵列与所述CCD探测器的距离等于所述微透镜单元的焦距;
所述微透镜阵列位于与所述会聚透镜的焦点距离为离焦量f
2.根据权利要求1所述的波前传感器,其特征在于,还包括光学匹配系统,所述光学匹配系设置于会聚透镜输入端,用于将待测波前匹配至会聚透镜。
3.根据权利要求1所述的波前传感器,其特征在于,还包括处理模块,所述处理模块用于对所述光斑阵列重组以得到等效子孔径图像,通过等效子孔径图像计算出被测波前的局部斜率后,利用重构矩阵计算待测波前的各阶Zernike像差系数,以得到待测波前的相位分布。
4.根据权利要求1所述的波前传感器,其特征在于,所述微透镜单元的F数小于所述会聚透镜的F数。
5.根据权利要求1所述的波前传感器,其特征在于,所述CCD探测器像元尺寸与单个微透镜元的孔径相匹配。
6.根据权利要求5所述的波前传感器,其特征在于,所述微透镜单元的孔径为所述CCD探测器像元尺寸的整数倍。
7.根据权利要求1所述的波前传感器,其特征在于,所述微透镜阵列中的各微透镜单元的焦距相等,所述微透镜单元的填充因子大于99%,透过率大于99%。
8.根据权利要求1所述的波前传感器,其特征在于,所述微透镜阵列为折射式微透镜阵列或反射式微透镜阵列或二元衍射元件。
说明书
技术领域
本实用新型涉及波前探测领域,特别涉及一种离焦型光场相机的波前传感器。
背景技术
自适应光学作为近几十年发展起来的新型光学技术,其利用光电子器件实时测量波前的动态误差,并通过高速的计算机系统进行计算和控制,使能动器件对波前进行实时矫正。自适应光学使光学系统具有自动适应外界条件变化,保持良好工作状态的能力,在高分辨率成像和激光传输领域有着重要应用。
波前传感器是自适应光学系统的重要组成部分,其中自适应光学技术主要通过测量波前畸变的一阶导数(斜率)或二阶导数(曲率)进行波前传感。夏克-哈特曼传感器是目前应用最广泛的波前传感器,它利用微透镜阵列分割入射波前,测量各子孔径内波面的平均斜率,进而复原出波前像差。夏克-哈特曼传感器具有结构紧凑、光能利用率高和能工作于连续或脉冲目标等多种优点,但同时上也存在动态范围较小,弱光探测能力不足及难以调整波前测量的空间分辨率等缺陷。在1996年Ragazzoni提出了一种四棱锥波前传感器,其基本原理是光束聚焦在四棱锥顶点后分光,通过探测面上四个子光瞳像之间的强度差异计算波前局部斜率。四棱锥波前传感器具有高于哈特曼传感器的空间分辨率,在闭环校正时的灵敏度和弱光探测能力也更为突出。
另外在2003年新西兰的Clare和Lane提出了一种将微透镜阵列放置在物镜后焦面并结合CCD光电探测器进行波前探测的方法。然而现有技术中的波前探测方法存在因微透镜孔径具有一定尺寸(通常为衍射极限的数倍),及光场相机波前传感器的测量精度受到信号饱和现象的制约,而导致只能进行较为粗略的波前测量,并使在自适应光学技术中的应用受到一定限制的问题。
实用新型内容
本实用新型旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本实用新型的一个目的是提供一种大视场、大动态范围、高测量精度、结构简单、契合自适应光学发展趋势的离焦型光场相机波前传感器。
本实用新型提供一种离焦型光场相机波前传感器,包括:
会聚透镜,用于会聚所述待测波前;
微透镜阵列,用于对所述会聚透镜会聚所述待测波前所形成的光斑进行分割,所述微透镜阵列包括多个微透镜单元;
CCD探测器,用于接受微透镜阵列对光斑分割后形成的光斑阵列信息,所述微透镜阵列与所述CCD探测器的距离等于所述微透镜单元的焦距;
所述微透镜阵列位于与所述会聚透镜的焦点距离为离焦量fdefcous处;所述离焦量为 fdefcous=r·n·f,n为微透镜阵列中一个微透镜单元所对应的CCD探测器的像素数,f为微透镜单元的焦距,r表示等效子孔径的光斑占据的微透镜单元个数。
进一步地,还包括光学匹配系统,所述光学匹配系设置于会聚透镜输入端,用于将待测波前匹配至会聚透镜。
进一步地,还包括处理模块,所述处理模块用于对所述光斑阵列重组以得到等效子孔径图像,通过等效子孔径图像计算出被测波前的局部斜率后,利用重构矩阵计算待测波前的各阶Zernike像差系数,以得到待测波前的相位分布。
进一步地,所述微透镜元的F数为所述会聚透镜的F数的整数倍。
进一步地,所述CCD探测器像元尺寸与单个微透镜元的孔径相匹配,
进一步地,所述微透镜单元的孔径为所述CCD探测器像元尺寸的整数倍。
进一步地,所述微透镜阵列中的各微透镜单元的焦距相等,所述微透镜单元的填充因子大于99%,透过率大于99%,所述微透镜阵列与所述CCD探测器的距离等于微透镜单元的焦距。
进一步地,所述微透镜阵列为折射式微透镜阵列或反射式微透镜阵列或二元衍射元件。
本实用新型通过采用微透镜阵列离焦的技术手段,克服现有技术中存在现有技术中存在因微透镜孔径具有一定尺寸(通常为衍射极限的数倍),及光场相机波前传感器的测量精度受到信号饱和现象的制约,而导致只能进行较为粗略的波前测量技术问题,实现了以结构简单的光学系统对波前进行大视场、大动态范围、高测量精度的测量。
附图说明
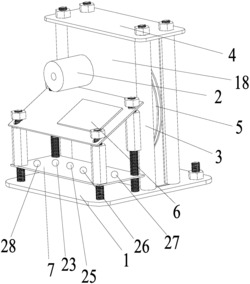
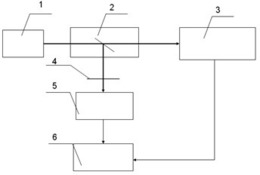
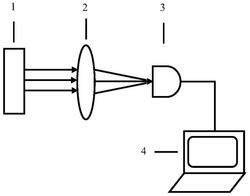
图1为本实用新型的离焦型光场相机波前传感器的结构示意图;
图2为本实用新型的离焦型光场相机波前传感器的剖视图;
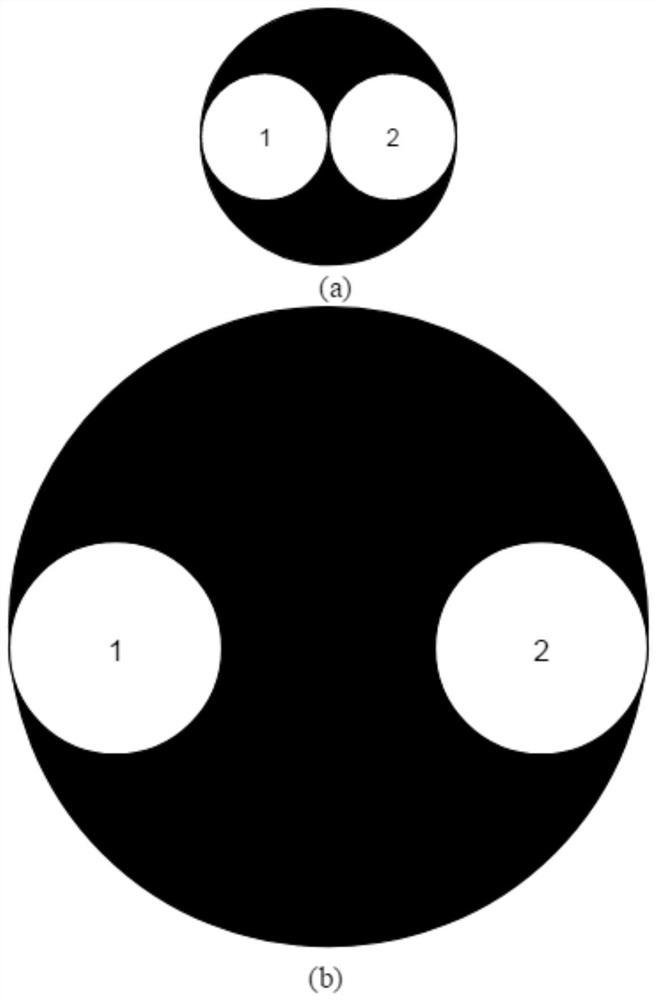
图3为本实用新型的离焦型光场相机波前传感器的数据重组的结构示意图;
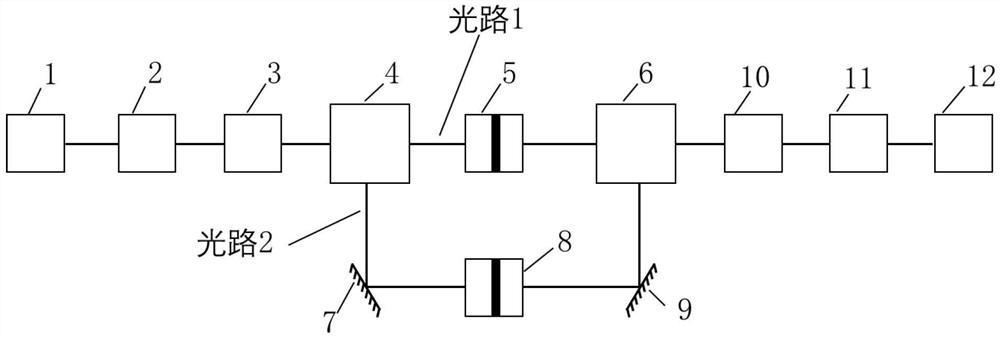
图4为本实用新型的离焦型光场相机波前传感器的微透镜阵列离焦量计算的结构示意图。
图5A为输入待测波前的检测图;
图5B为输入待测波前的Zernike多项式系数的分布示意图;
图6A为现有光场相机重构待测波前的检测图;
图6B为现有光场相机波前重构的Zernike多项式系数的分布示意图;
图7A为本实用新型的离焦型光场相机波前传感器重构待测波前的检测图;
图7B为本实用新型的离焦型光场相机波前传感器的Zernike多项式系数的分布示意图。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
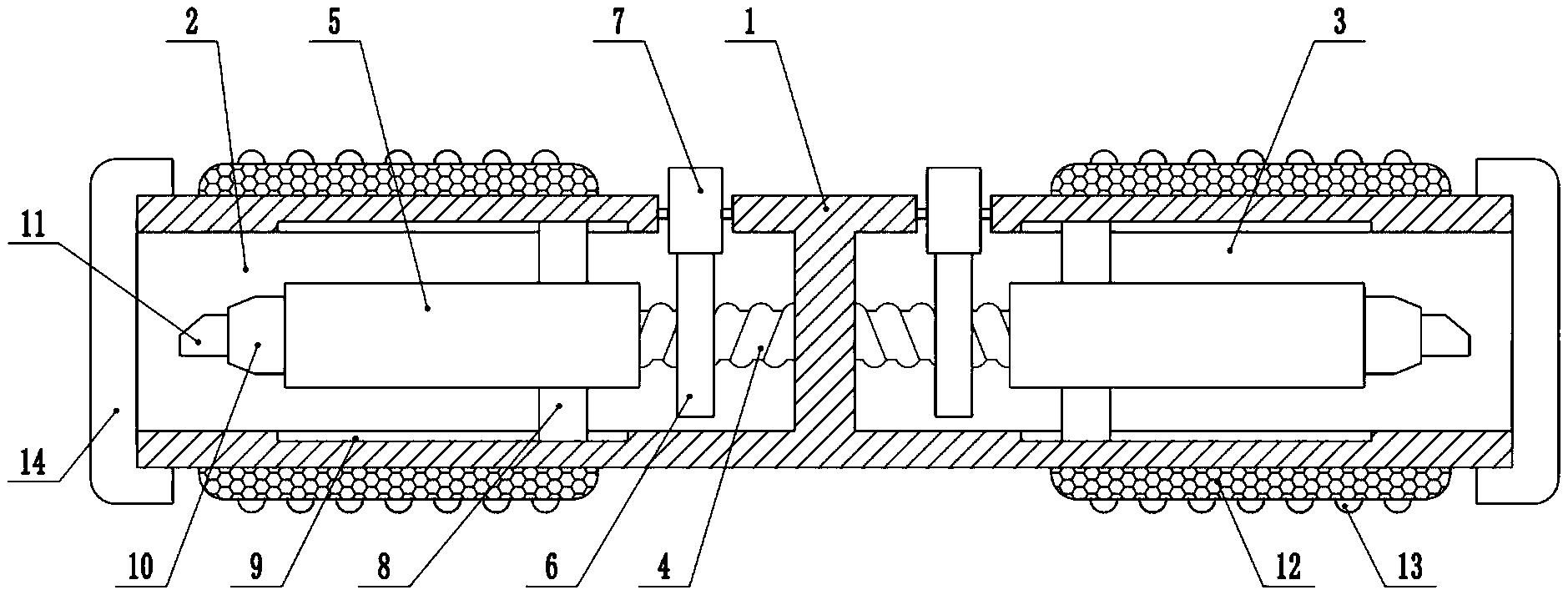
请参阅图1,图1为本实用新型的离焦型光场相机波前传感器的结构示意图。其具体包括光学匹配系统1,会聚透镜2,微透镜阵列3,CCD探测器4。其中微透镜阵列3包括按一定的周期排列在同一个平面的多个相同的微透镜单元。光学匹配系统1的输出面和会聚透镜2的前焦面相重合,微透镜阵列3位于会聚透镜2的后焦面附近,且存在一定的离焦量。光学匹配系统1用于对待测波前进行预调制,如将待测波前调制为平行光并入射至会聚透镜2。微透镜阵列3中微透镜单元的F数(即相对孔径的倒数)小于会聚透镜2的F数,以保证微透镜下像素的充分利用且不产生数据的混叠,CCD探测器4与微透镜阵列3之间的距离等于上述微透镜的焦距。待测波前畸变经过光学匹配系统1和会聚透镜2在微透镜阵列3上形成一定面积的光斑,微透镜阵列3对光斑进行分割并在CCD探测器4上成像为光斑阵列。通过对CCD探测器4接收到的图像进行重组可得到等效子孔径图像,计算出被测波前的局部斜率后,利用重构矩阵计算待测波前的各阶Zernike像差系数,以得到待测波前的相位分布。
为了描述的方便,又不失结论的一般性,利用几何光学以光场相机的二维形式为例来说明本发明实现波前探测的具体实施方法。
请参阅图2,图2为本实用新型的离焦型光场相机波前传感器的剖视图。如图2所示,通过会聚透镜2的前焦面点A的光线,依次经过会聚透镜2和微透镜阵列3,并在发生折射后照射至CCD探测器4上,且照亮CCD探测器4上的一个像素。其中无论光线的入射方向如何改变,通过A点的光线在微透镜发生折射后的传播方向相互平行。即在CCD探测器4 上照亮的像元与对应微透镜阵列3的微透镜单元的相对位置是固定的。
在其他变更实施例中,可根据应用场景的差异设计其他透镜的结构替换会聚透镜2,以获得较高的波前测量灵敏度或更大的波前传感视场。如在大视场自适应光学技术中可利用透镜组增大探测视场;或利用摄远镜头结构缩短系统尺寸。
在本实施例中微透射镜阵列为折射式微透镜阵列,在其他变更实施例中,可采取实现微透镜阵列功能的其他的元件阵列,如反射式微透镜阵列、利用二元衍射元件。
在其他变更实施例中,可微透镜阵列和CCD探测器之间加入物像共轭系统,以便灵活地调整波前传感的空间分辨率,并降低光场相机的装配难度
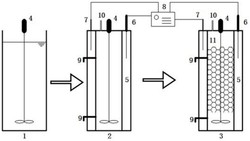
请参阅图3,图3为本实用新型的离焦型光场相机波前传感器的数据重组的结构示意图。结合微透镜阵列3的多个微透镜单元进行说明,将每一个微透镜单元的光瞳像中的1号像元按照微透镜阵列3中微透镜单元的排列顺序重组为一幅图像,重组图像表示入瞳处一定区域内的光波在焦面的光斑,等效于哈特曼探测器的子孔径图像。利用质心算法可以计算入射畸变波前的局部斜率,进而恢复出波前畸变包含的相位信息。
以下举例以对数据重组的过程作进一步说明,假设微透镜阵列3为一300行400列的透镜阵列,即微透镜阵列3包含有1.2w个微透镜单元,且每个微透镜单元与30*30个像素相对设置。可提取30×30张子孔径图像,每张子孔径图像为300×400像素,中心角度的子孔径图像我们就是按顺序提取每一个微透镜中心位置的像素值,按顺序重新拼成一幅新的300 ×400的图像,就是子孔径图像。
进一步为,我们提取(0,0)位置的微透镜单元的1号像素的像素值,也就是子孔径图像(0,0)位置的像素值,(0,1)位置的微透镜单元的1号像素的像素值,就是子孔径图像(0,1)位置的像素值,以此顺序类推,直到提取完所有的微透镜单元的1号像素的像素值。以此类推,对剩余像素在所有的微透镜单元进行像素值提取以生成剩余像素的子孔径图像。
通过Zernike像差系数计算,可恢复出待测波前包含的相位信息。
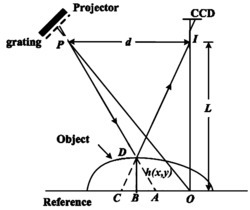
请参阅图4,图4为本实用新型的离焦型光场相机波前传感器的微透镜阵列离焦量计算的结构示意图。光场相机波前传感器的波前测量精度一般由微透镜阵列3中的微透镜单元的孔径决定,微透镜单元的孔径越小,则斜率测量精度越高。但是在实际应用中,微透镜单元的孔径通常为百微米量级,会聚透镜2后焦面上的光斑面积远小于微透镜元单元的尺寸,光场相机无法准确感知质心偏移量。因此通过将微透镜阵列3置于会聚透镜2的后焦面之后,以扩大光斑的面积。即通过引入一离焦量,以使会聚透镜2后焦面上的光斑面积与微透镜元单元的尺寸相匹配,从而使光场相机可准确感知质心偏移量。
而离焦量的设置原则是保证等效子孔径在微透镜阵列上的光斑面积大于微透镜元的口径,具体可以表述为fdefcous=r·n·f,其中n为单个微透镜下的CCD像素数,f为微透镜焦距,r表示等效子孔径的光斑占据的微透镜个数,通常的取值范围是2~4。
在此实例中,按照上述方法计算得到的离焦量可以保证等效子孔径内的光斑覆盖多个微透镜,提高光场相机波前传感器的测量精度。
本发明利用会聚透镜、微透镜阵列和CCD探测器的组合,通过优化设计光学结构,解决了光场相机波前传感器线性度差、波前测量精度低的缺陷,构建了一种视场大,动态范围大,测量精度高,结构简单的波前传感器。
以下对下述各图的横坐标及纵坐标做解析说明。其中图5A、图6A、图7A中的左侧纵坐标及底部横坐标用于表示波前的空间坐标,其右侧纵坐标则表示Zernike多项式系数。而5B、图6B、图7B所示,纵坐标表示Zernike多项式系数,其横坐标表示Zernike多项式阶数。
请一并参阅图5A-5B,其中图5A为输入待测波前的检测图,图5B为图5A对应的输入待测波前的Zernike多项式系数。
请一并参阅图6A-6B,其中图6A为现有光场相机波前重构结果的检测图,图6B为图6A对应的波前重构结果的Zernike多项式系数。以现有光场相机对波前进行检测并重构,重构结果如图6A所示。且如图6B所示,以现有光场相机进行波前重构所得的Zernike多项式系数与输入波前畸变Zernike多项式系数存在较大差异,其测量精度较低。
请一并参阅图7A-7B,其中图7A为离焦型场相机波前重构结果的检测图,图7B为图7A对应的波前重构结果的Zernike多项式系数。如图7B所示,离焦行光场相机进行波前重构所得的Zernike多项式系数与输入波前畸变Zernike多项式系数基本吻合,则其测量精度较高。即本发明所提供的基于离焦型光场相机的波前探测方法与现有的波前探测方法相比较在测量精度上存在明显的优化效果。
以上是对本实用新型的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本申请权利要求所限定的范围内。
一种离焦型光场相机波前传感器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0