







专利摘要
本发明公开了一种基于GS迭代算法的奇点光的相位与偏振检测系统与方法,系统包括:用于产生不同拓扑荷数以及不同偏振阶数的奇点光的奇点光产生模块;用于将所述奇点光中的左旋圆偏振分量与右旋圆偏振分量进行分离,得到两个拓扑荷数不同的涡旋光束的偏振分离模块;用于采集分离后的涡旋光束经过柱透镜进行傅里叶变换后焦点位置的光强信息的光强采集模块;用于将两个涡旋光束的相位分别进行还原,并将两个不同偏振分量的涡旋光束进行叠加,得到所述奇点光的相位与偏振分布的数据处理模块。相对与传统的检测方法,本发明不仅能更准确的得到奇点光的相位与偏振分布情况,而且系统更为简单,耗时短,操作便捷。
权利要求
1.一种基于GS迭代算法的奇点光的相位与偏振检测系统,其特征在于,所述系统包括:
奇点光产生模块,用于产生不同拓扑荷数以及不同偏振阶数的奇点光;
偏振分离模块,用于将所述奇点光中的左旋圆偏振分量与右旋圆偏振分量进行分离,得到两个拓扑荷数不同的涡旋光束;
光强采集模块,用于采集分离后的涡旋光束分别经过柱透镜进行傅里叶变换后焦点位置的光强信息;
数据处理模块,用于基于GS迭代算法将两个涡旋光束的相位分别进行还原,并将两个不同偏振分量的涡旋光束进行叠加,得到所述奇点光的相位与偏振分布;
所述奇点光产生模块、所述偏振分离模块、所述光强采集模块以及所述数据处理模块依次连接。
2.根据权利要求1所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其特征在于,所述奇点光产生模块包括:用于产生高斯光束的光源;
与所述光源连接,用于改变入射光偏振方向的起偏器;
与所述起偏器连接,用于改变入射光相位与偏振结构,并产生不用拓扑荷数以及不同偏振阶数的奇点光的奇点光产生装置。
3.根据权利要求2所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其特征在于,所述偏振分离模块包括:与所述奇点光产生装置连接,用于实现对偏振分离的偏振分解器。
4.根据权利要求3所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其特征在于,所述光强采集模块包括:与所述偏振分解器连接,用于实现傅里叶变换的傅里叶变换单元;与所述傅里叶变换单元连接,用于采集分离后的涡旋光束的光强图案的光强拍摄装置。
5.根据权利要求2所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其特征在于,所述光源设置为波长为632.5nm的He-Ne激光器,所述起偏器为格兰棱镜,所述奇点光产生装置包括四分之一波片与Q-plate。
6.根据权利要求5所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其特征在于,所述奇点光产生装置还包括涡旋超表面或者空间光调制器。
7.根据权利要求3所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其特征在于,所述偏振分解器包括四分之一波片与偏振分束器。
8.根据权利要求7所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其特征在于,所述偏振分解器还包括四分之一波片与检偏器。
9.根据权利要求4所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其特征在于,所述傅里叶变换单元为焦距为10cm的柱透镜;所述光强采集装置为CCD探测器。
10.一种基于上述权利要求1-9任一项所述的基于GS迭代算法的奇点光的相位与偏振检测系统的检测方法,其特征在于,所述方法包括:
使用奇点光产生装置产生不同拓扑荷数以及不同偏振阶数的奇点光;
所述奇点光中的左旋圆偏振分量与右旋圆偏振分量进行分离,得到两个拓扑荷数不同的涡旋光束;
采集分离后的涡旋光束分别经过柱透镜进行傅里叶变换后焦点位置的光强信息;
基于GS迭代算法将两个涡旋光束的相位分别进行还原,并将两个不同偏振分量的涡旋光束进行叠加,得到所述奇点光的相位与偏振分布。
说明书
技术领域
本发明涉及信息光学技术领域,具体涉及一种基于GS迭代算法的奇点光的相位与偏振检测系统及方法。
背景技术
奇点光束是一种光强分布呈类似于甜甜圈状的暗中空分布的特殊的结构光束,涡旋光、柱矢量光、柱矢量涡旋光都属于奇点光。其中,涡旋光携带有轨道角动量,具有螺旋状的特殊相位结构,可表示为exp(ilθ),l为其拓扑荷数,不同拓扑荷数之间的涡旋光相互正交,且理论上l可以取任意整数值,这种特性使得涡旋光在光学复用通信上具有非常强大的应用前景。柱矢量光是一种偏振分布不均匀的光束,其中心位置存在偏振奇点,因此光强也为暗中空分布。柱矢量光在紧聚焦场的作用下在其焦点位置可以得到很强的纵向偏振光场,且相对于普通高斯光束,其具有更小的焦斑尺寸。根据这一特性,柱矢量光束在数据存储、粒子加速、超分辨成像、光镊等领域都有广泛的应用。柱矢量涡旋光束是一种同时包含了柱矢量偏振态与涡旋相位的一种特殊的奇点光束,其同时具备柱矢量光与涡旋光的特性,存在着巨大的运用潜力。柱矢量光与柱矢量涡旋光均可分解为不同拓扑荷数的左旋与右旋圆偏振涡旋光。相位与偏振作为描述光束的两个极为重要的参数,分析光束的相位与偏振结构成为进一步了解奇点光束的重中之重。
但是普通的测量涡旋光的螺旋相位一般使用的是平面波或者平面波干涉的方法,对柱矢量光偏振态的检测方法主要是使用Stokes参数法,该方法对光路的准直性与光束的相干性要求较高,实验光路较难调节。并且这两种方法分别只能对相位或者偏振进行测量,且实验光路较为复杂,对光路的准直性要求较高,费时费力且测量精度较低。虽然,也有很多专家学者提出了许多迭代算法来对相位进行恢复,到但是仍然存在还原的相位的误差均较大,迭代次数较多,计算量较大等问题。
因此,现有技术还有待于改进和发展。
发明内容
本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种基于GS迭代算法的奇点光的相位与偏振检测系统及系统,旨在解决现有技术中对于奇点光的相位与偏振测量的方法存在误差较大、测量精度低、实验光路复杂以及计算量大等问题。
本发明解决技术问题所采用的技术方案如下:
一种基于GS迭代算法的奇点光的相位与偏振检测系统,其中,所述系统包括:
奇点光产生模块,用于产生不同拓扑荷数以及不同偏振阶数的奇点光;
偏振分离模块,用于将所述奇点光中的左旋圆偏振分量与右旋圆偏振分量进行分离,得到两个拓扑荷数不同的涡旋光束;
光强采集模块,用于采集分离后的涡旋光束经过柱透镜进行傅里叶变换后焦点位置的光强信息;
数据处理模块,用于将两个涡旋光束的相位分别进行还原,并将两个不同偏振分量的涡旋光束进行叠加,得到所述奇点光的相位与偏振分布。
所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其中,所述奇点光产生模块包括:用于产生高斯光束的光源;
与所述光源连接,用于改变入射光偏振方向的起偏器;
与所述起偏器连接,用于改变入射光相位与偏振结构,并产生不用拓扑荷数以及不同偏振阶数的奇点光的奇点光产生装置。
所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其中,所述偏振分离模块包括:与所述奇点光产生装置连接,用于实现对偏振分离的偏振分解器。
所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其中,所述光强采集模块包括:与所述偏振分解器连接,用于实现傅里叶变换的傅里叶变换单元;与所述傅里叶变换单元连接,用于采集分离后的涡旋光束的光强图案的光强拍摄装置。
所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其中,所述光源设置为波长为632.5nm的He-Ne激光器,所述起偏器为格兰棱镜,所述奇点光产生装置包括四分之一波片与Q-plate。
所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其中,所述奇点光产生装置还包括涡旋超表面或者空间光调制器。
所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其中,所述偏振分解器包括四分之一波片与偏振分束器。
所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其中,所述偏振分解器还包括四分之一波片与检偏器。
所述的基于GS迭代算法的奇点光的相位与偏振检测系统,其中,所述傅里叶变换单元为焦距为10cm的柱透镜;所述光强采集装置为CCD探测器。
一种基于上述任一项所述的基于GS迭代算法的奇点光的相位与偏振检测方法,其中,所述方法包括:
使用奇点光产生装置产生不同拓扑荷数以及不同偏振阶数的奇点光;
所述奇点光中的左旋圆偏振分量与右旋圆偏振分量进行分离,得到两个拓扑荷数不同的涡旋光束;
采集分离后的涡旋光束经过柱透镜进行傅里叶变换后焦点位置的光强信息;
将两个涡旋光束的相位分别进行还原,并将两个不同偏振分量的涡旋光束进行叠加,得到所述奇点光的相位与偏振分布。
本发明的有益效果:本发明通过产生不同拓扑荷数以及不同偏振阶数的奇点光,并对奇点光进行偏振分离,然后对分离后得到的两个涡旋光进行傅里叶变换,采集光强信息,在对光强信息进行迭代计算,得到奇点光的相位与偏振分布,相对与传统的检测方法,本发明不仅能更准确的得到奇点光的相位与偏振分布情况,而且系统更为简单,耗时短,操作便捷。
附图说明
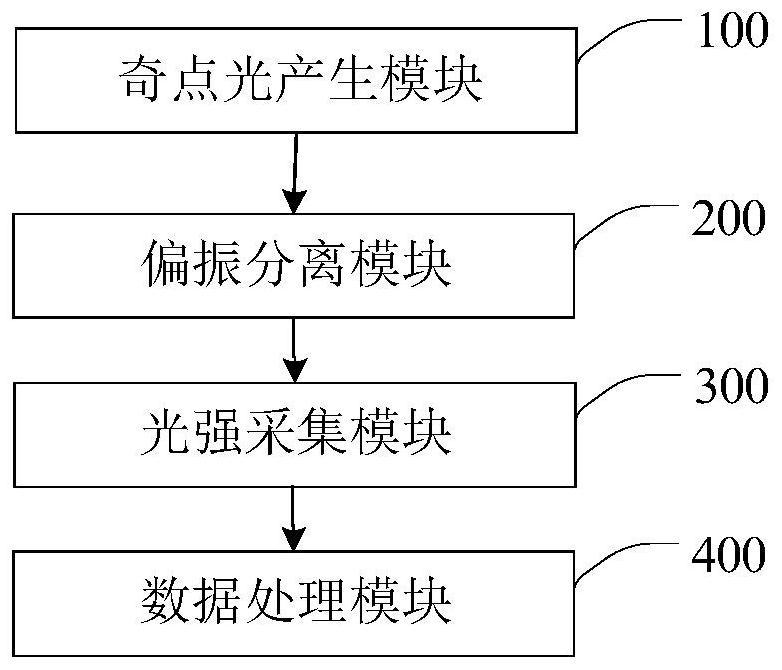
图1是本发明的基于GS迭代算法的奇点光的相位与偏振检测系统的原理框图。
图2是本发明基于GS迭代算法的奇点光的相位与偏振检测系统中GS迭代算法计算原理图。
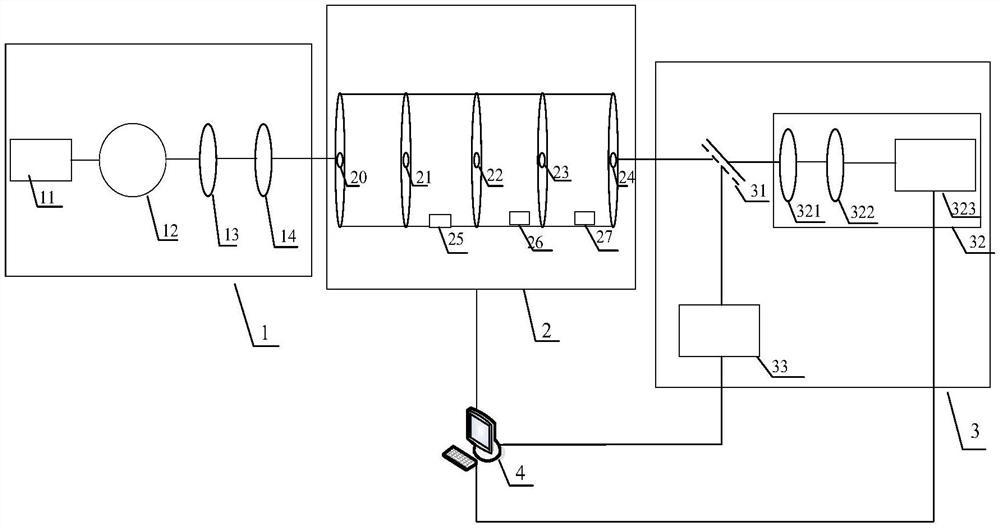
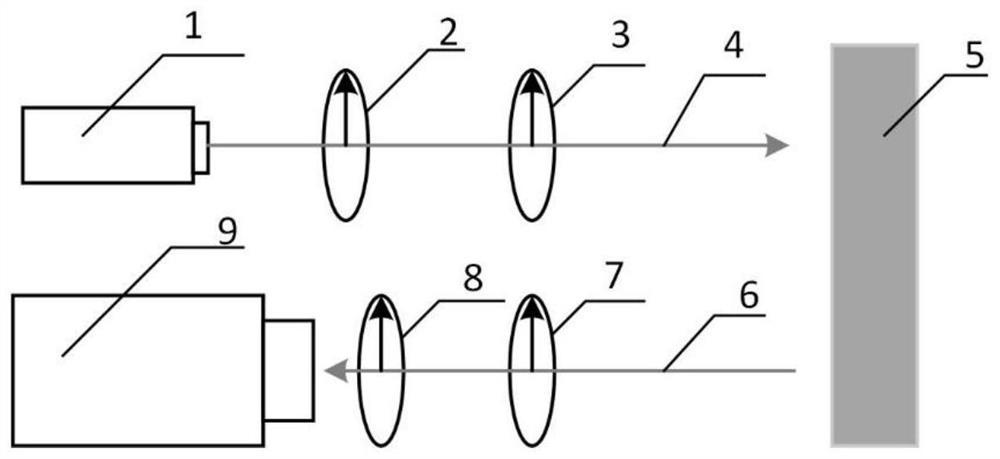
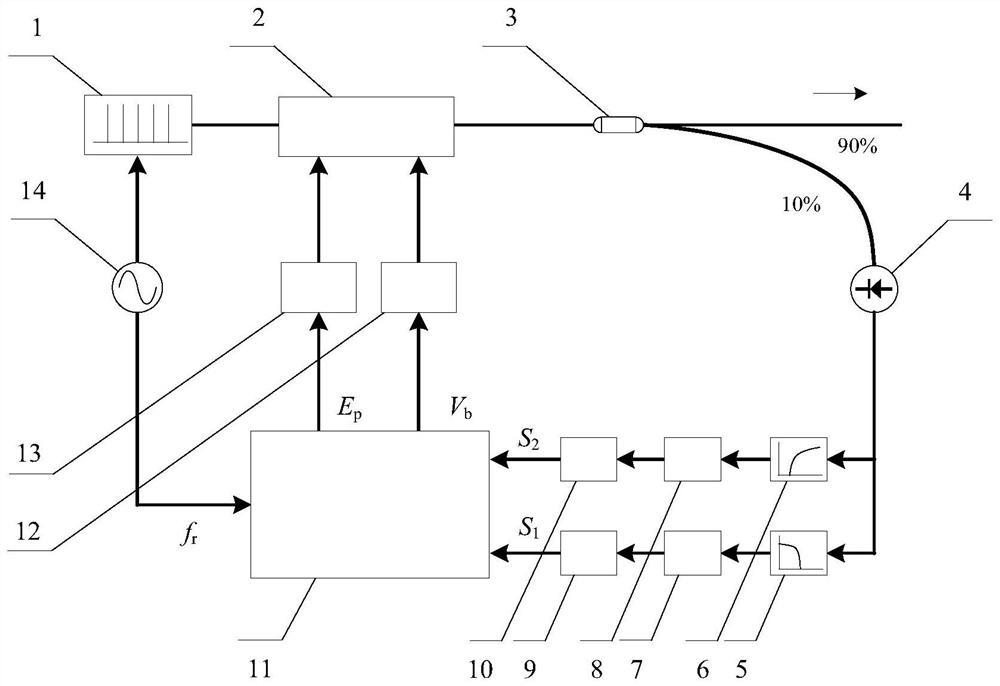
图3是本发明基于GS迭代算法的奇点光的相位与偏振检测系统的第一较佳实施例的实验装置示意图。
图4是本发明基于GS迭代算法的奇点光的相位与偏振检测系统的第二较佳实施例的实验装置示意图。
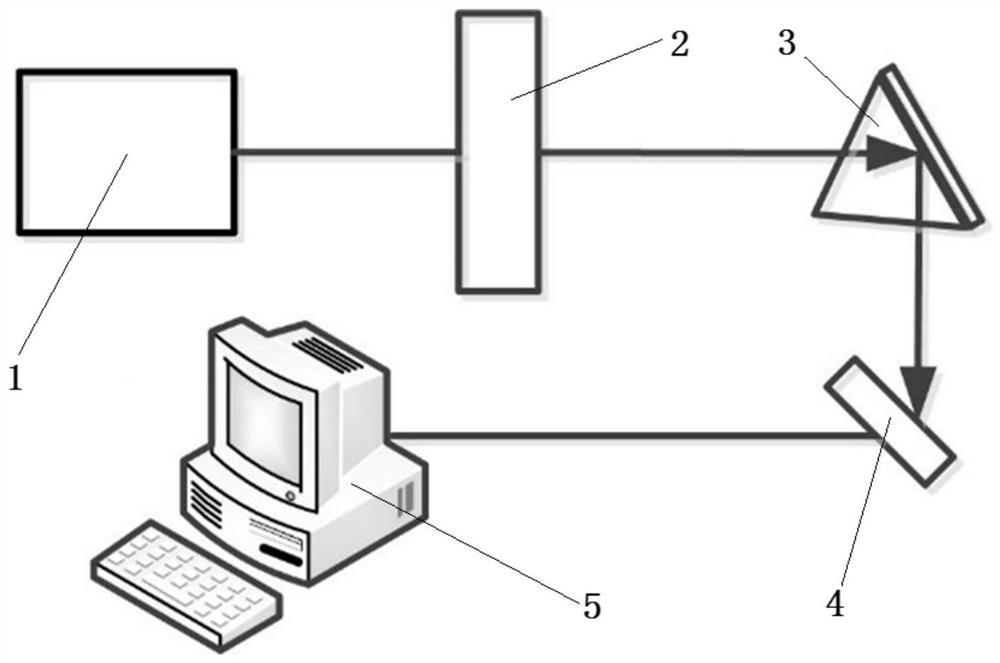
图5是本发明基于GS迭代算法的奇点光的相位与偏振检测系统的第三较佳实施例的实验装置示意图。
图6是本发明基于GS迭代算法的奇点光的相位与偏振检测方法的流程示意图。
具体实施方式
为使本发明的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
针对现有技术中对于奇点光的相位与偏振测量的方法存在误差较大、测量精度低、实验光路复杂以及计算量大等问题,本发明提供一种基于GS迭代算法的奇点光的相位与偏振检测系统,具体如图1中所示,该系统包括:奇点光产生模块100、偏振分离模块200、光强采集模块300以及数据处理模块400。具体地,在本实施例中,奇点光产生模块100,用于产生不同拓扑荷数以及不同偏振阶数的奇点光;偏振分离模块200,用于将所述奇点光中的左旋圆偏振分量与右旋圆偏振分量进行分离,得到两个拓扑荷数不同的涡旋光束;光强采集模块300,用于采集分离后的涡旋光束经过柱透镜进行傅里叶变换后焦点位置的光强信息;数据处理模块400,用于将两个涡旋光束的相位分别进行还原,并将两个不同偏振分量的涡旋光束进行叠加,得到所述奇点光的相位与偏振分布。本实施例中主要是通过产生不同拓扑荷数以及不同偏振阶数的奇点光,并给对奇点光进行偏振分离,然后对分离后得到的两个涡旋光进行傅里叶变换,采集光强信息,再对光强信息进行迭代计算,得到奇点光的相位与偏振分布,相对与传统的检测方法,本发明不仅能更准确的得到奇点光的相位与偏振分布情况,而且系统更为简单,耗时短,操作便捷。
具体地,如图2中所示,图2中给出了本发明中所使用的GS(The Gerchberg–Saxton)算法的计算原理。如图2所示,入射光为Uin,将其通过相位为Φ的柱透镜做傅里叶变换后得到光场分布为:
其中A为光场的振幅项, 为光场的相位项,保持相位项不变,将光场的振幅项替换为CCD探测器中采集到的相应的光强,得到新的光场分布 再通过相应的柱透镜进行傅里叶逆变换得到新的光场分布:
为了提升还原的精度,我们这里通过改变柱透镜的偏转角度,其中i为柱透镜一个周期内旋转的次数,得到多组数据后求其平均值,然后将得到的光场作为输入进行下一次迭代。其中l为迭代次数,
其中k=2π/λ为波数,λ为入射光波长,f为柱透镜焦距。当迭代了M次得到准确的光场分布后,入射光束的相位分布为angle(U)。
本发明就是基于上述GS算法来对奇点光所分离出来的两个拓扑荷数不同的涡旋光束进行处理,从而得到奇点光的相位分布,整个算法过程简单,计算量小,并且误差小,从而实现更为准确的相位即偏振检测。
优选地本实施例中的奇点光产生模块100包括:用于产生高斯光束的光源;与所述光源连接,用于改变入射光偏振方向的起偏器;与所述起偏器连接,用于改变入射光相位与偏振结构,并产生不用拓扑荷数以及不同偏振阶数的奇点光的奇点光产生装置。所述偏振分离模块200包括:与所述奇点光产生装置连接,用于实现对偏振分离的偏振分解器。光强采集模块300包括:与所述偏振分解器连接,用于实现傅里叶变换的傅里叶变换单元;与所述傅里叶变换单元连接,用于采集分离后的涡旋光束的光强图案的光强拍摄装置。数据处理模块400包括但不限于具有数据处理功能的计算机。
进一步地,在本实施例中,光源设置为波长为632.5nm的He-Ne激光器,所述起偏器为格兰棱镜,所述奇点光产生装置为四分之一波片与Q-plate组成。所述偏振分解器为四分之一波片与偏振分束器组成。所述傅里叶变换单元为焦距为10cm的柱透镜;所述光强采集装置为CCD探测器。值得说明的是,上述器件仅仅用来说明本发明,并不用来限定本发明,可用相应功能的其他器件来替代。例如,奇点光产生装置还可以是涡旋超表面或者空间光调制器。偏振分解器还可以是四分之一波片与检偏器组成。傅里叶变换单元中的柱透镜也不仅仅限定与10cm的焦距,还可以用其他可实现傅里叶变换且傅里叶变换后光强有明显特征的傅里叶变换器件代替。
进一步地,本发明还提供三个具体的实施例,分别以涡旋光、柱矢量光以及柱矢量涡旋光为例对本发明的技术方案进行说明,具体如下。
实施一
参照图3,图3是以涡旋光为例的本发明系统的实验装置图。本实施例中的实验装置由12个部分组成,其中1为光源,2为光轴方向在X轴的格兰镜,3为第一块与X轴成45°的四分之一波片(QWP),4为超表面,5为第二块与X轴成45°夹角的四分之一波片,6为偏振分束器,7和9为柱透镜,8为反射镜,10和11为CCD探测器,12为计算机。具体地,光源1出射的光为高斯光,经过光轴方向在x轴的格兰棱镜2后变成x方向的偏振。优选地,本实施例中使用一种表面刻蚀了亚波长结构的超表面来产生涡旋光,该超表面能改变入射光的相位与偏振(对于圆偏振光通过超表面,其出射光为旋向相反的圆偏振涡旋光;对于线偏振光入射,其出射光为矢量光)。在本实施例中,对于通过格兰棱镜2后的x方向线偏振光,使用与x轴成45°的四分之一波片(QWP)3将其转换为左旋圆偏振光,再通过超表面4后变为右旋圆偏振态的涡旋光;偏振分离部分是通过使用另一块光轴与x轴成45°夹角的四分之一波片5将奇点光的左旋圆偏振与右旋圆偏振分量分别转化为x方向与y方向的线偏振光,再使用一个偏振分束器(PBS)6将其x方向与y方向的线偏振分量进行分离,分解后的光束一部分经过柱透镜7进行傅里叶变换,另一部分被反射镜8反射后,经过柱透镜9进行傅里叶变换,然后分别在柱透镜7和柱透镜9的焦点位置放置CCD探测器10和CCD探测器11进行光强的采集,最后输入计算机12中进行迭代运算。
实施例二
参照图4,图4是以柱矢量光为例的本发明系统的实验装置图。在本实施例中的实验装置11个部分组成,其中1为光源,2为光轴方向在X轴的格兰镜,3为与X轴成45°的四分之一波片(QWP),4为超表面,5为偏振分束器,6和8为柱透镜,7为反射镜,9和10为CCD探测器,11为计算机。在本实施例中,光源1产生的高斯光经过光轴方向在x轴的格兰棱镜2后变成了x方向偏振的线偏振光,再经过超表面4后即产生了柱矢量光。与实施例一相比,本实施例中减少了一块光轴与x轴成45°夹角的四分之一波片。对于柱矢量光而言,本实施例将其分解为拓扑荷数相反的两束左旋与右旋圆偏振涡旋光,具体原理如下:
其中er与 分别代表了径向柱矢量光与角向柱矢量光,m为柱矢量光的偏振阶数,由上式可知道,柱矢量光可由拓扑荷数互为相反数的左旋与右旋涡旋光组合而成。本实施例中使用迭代算法分别将两个偏振方向的涡旋光的相位计算出后,再将两个已知偏振态的涡旋相位进行叠加即可得到柱矢量光的偏振分布。
实施例三
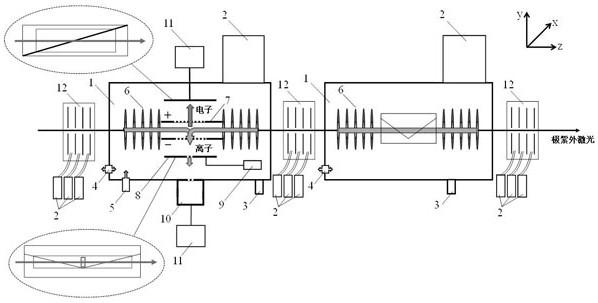
参照图5,图5是以柱矢量涡旋光为例的本发明系统的实验装置图。本实施例的实验装置由14个部分组成,其中1为光源,2为光轴方向在X轴的格兰镜,3为第一块与X轴成45°的四分之一波片,4为第一块超表面,5为第二块与X轴成45°夹角的四分之一波片,6为第二块超表面,7为第三块与X轴成45°夹角的四分之一波片,8为偏振分束器,9和11为柱透镜,10为反射镜,12和13为CCD探测器,14为计算机。在本实施例中,光源1产生的高斯光经过光轴方向在x轴的格兰棱镜2后变成了x方向偏振的线偏振光,再经过第一块光轴与x轴成45°角的四分之一波片3转化为左旋圆偏振高斯光,经过第一块超表面4后变为了右旋圆偏振的涡旋光,再透过第二块光轴与x轴成-45°角的四分之一波片5后变为y方向偏振的线偏振涡旋光,通过第二块超表面6后即变成了柱矢量涡旋光,后续再通过7-14一系列器件将柱矢量涡旋光中两个圆偏振分量的涡旋光相位分别求出后,两个已知偏振态与相位的涡旋光叠加即可得到柱矢量涡旋光的相位与偏振分布信息。本实施例中通过琼斯矩阵来证明柱矢量涡旋光可由两束拓扑荷数不同的左旋与右旋圆偏振涡旋光叠加而成:
由上述计算公式可知,柱矢量涡旋光可由拓扑荷数分别为l+m与l-m的左旋与右旋涡旋光组合而成,其中m为柱矢量涡旋光的偏振阶数,l为柱矢量涡旋光的拓扑荷数。
由此可见,本实施例可以入上述实施例一所示的得到涡旋光准确的相位分布,同时也可以如实施例二与实施例三所示的,利用柱矢量光与柱矢量涡旋光可分解为不同拓扑荷数且旋向不同的圆偏振涡旋光的特性,将两个涡旋分量进行叠加后便得到了柱矢量光与柱矢量涡旋光的相位与偏振结构。
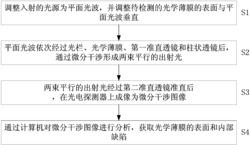
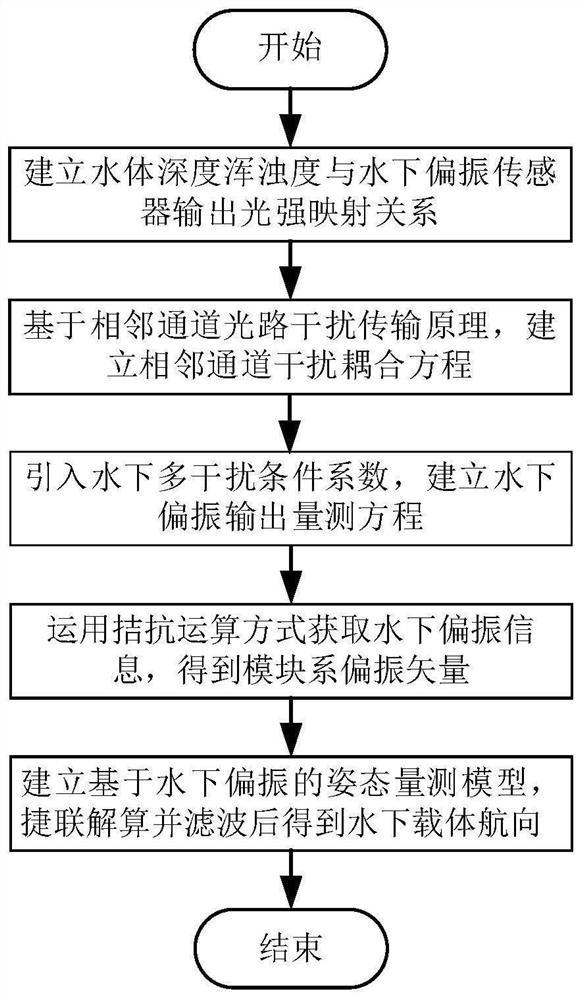
基于上述实施例,本发明还提供一种基于GS迭代算法的奇点光的相位与偏振检测方法,如图6所示。具体地,该方法包括:
步骤S100、使用奇点光产生装置产生不同拓扑荷数以及不同偏振阶数的奇点光;
步骤S200、所述奇点光中的左旋圆偏振分量与右旋圆偏振分量进行分离,得到两个拓扑荷数不同的涡旋光束;
步骤S300、采集分离后的涡旋光束经过柱透镜进行傅里叶变换后焦点位置的光强信息;
步骤S400、将两个涡旋光束的相位分别进行还原,并将两个不同偏振分量的涡旋光束进行叠加,得到所述奇点光的相位与偏振分布。
本实施例基于GS迭代算法的对任意奇点光束的相位与偏振进行检测,成功利用光束在时域与频域变换时,其振幅信息与相位信息会发生交换的特性,利用采集的涡旋光在经过傅里叶变换后的光强对入射光进行多次迭代约束,最后得到奇点光准确的相位分布。相对与传统的检测方法,本发明不仅能更准确的得到奇点光的相位与偏振分布情况,而且系统更为简单,耗时短,操作便捷。
综上所述,本发明提供了一种基于GS迭代算法的奇点光的相位与偏振检测系统与方法,系统包括:用于产生不同拓扑荷数以及不同偏振阶数的奇点光的奇点光产生模块;用于将所述奇点光中的左旋圆偏振分量与右旋圆偏振分量进行分离,得到两个拓扑荷数不同的涡旋光束的偏振分离模块;用于采集分离后的涡旋光束经过柱透镜进行傅里叶变换后焦点位置的光强信息的光强采集模块;用于将两个涡旋光束的相位分别进行还原,并将两个不同偏振分量的涡旋光束进行叠加,得到所述奇点光的相位与偏振分布的数据处理模块。相对与传统的检测方法,本发明不仅能更准确的得到奇点光的相位与偏振分布情况,而且系统更为简单,耗时短,操作便捷。
应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
基于GS迭代算法的奇点光的相位与偏振检测系统与方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0