

IPC分类号 : F04B49/06I,F04B53/00I,F02D45/00I,B62D5/06I,B62D5/07I









专利摘要
本实用新型涉及一种24V电控液压助力转向泵ECU,包括微处理器模块、电源模块、点火信号处理模块、通讯端口模块、电压检测模块、温度检测模块、电流采样模块、电机驱动模块,所述电源模块、点火信号处理模块、通讯端口模块、电压检测模块、温度检测模块、电流采样模块与微处理器输入信号连接,所述电机驱动模块与微处理器输出信号连接。本实用新型的24V电控液压助力转向泵ECU,与装配在直流电机支架上的MOS管相连,完成对MOS管的控制,使与之配套的直流电机可控运转,实现驾驶员对24V电控液压助力转向泵的有效控制,最终达到当汽车转向时,该电控液压助力转向泵为驾驶员提供转向助力。
权利要求
1.一种24V电控液压助力转向泵ECU,其特征在于包括微处理器、电源模块、点火信号处理模块、通讯端口模块、电压检测模块、温度检测模块、电流采样模块、电机驱动模块,所述电源模块、点火信号处理模块、通讯端口模块、电压检测模块、温度检测模块、电流采样模块与微处理器输入信号连接,所述电机驱动模块与微处理器输出信号连接。
2.根据权利要求1所述的24V电控液压助力转向泵ECU,其特征在于所述微处理器为英飞凌2000系列CPU模块,用于进行多种信号处理、数据运算、PWM驱动信号生成;
所述电源模块用于将车载电瓶电压变换为满足微处理器的工作电压;
所述点火信号处理模块用于将汽车点火信号接入并触发所述电源模块启动;
所述通讯端口模块用于将车身的CAN信号输入到微处理器中,同时将微处理器的运行状态反馈到车身电脑里,实现信息交换;
所述电压检测模块与微处理器连接,用于实时监视整车工作电压从而控制电机的是否运转;
所述电流采样模块用于将工作电流采样放大,用做微处理器作为判定负载状况的依据,过载时,控制电机停止工作;
所述温度检测模块用于对助力转向泵泵体工作温度的跟踪检测;
所述电机驱动模块用于将微处理器产生的PWM信号进行信号处理,对电机的运行状态进行控制。
3.根据权利要求1所述的24V电控液压助力转向泵ECU,其特征在于所述微处理器芯片型号为XC2336B。
4.根据权利要求1所述的24V电控液压助力转向泵ECU,其特征在于所述电源模块包括芯片U8,所述芯片U8的1脚连接到J9接口,所述J9接口连接车载24V电瓶,J9接口与地之间跨接电容C33和瞬态二极管D2;D2用于消除静电效应、浪涌电流和噪音等因素干扰,很好地抑制车身电瓶电压的突变;2脚接收来至外围的控制信号,3脚与CPU模块的/RSTIN端口相连,同时对地跨接电容C50;4脚接地;5脚接电容C61,电容C61的另一端同时接地;6脚连接CPU模块的P7.0端口;7脚为输出端,对地接电容C65和电容C53,电容C65和电容C53的正极连接电源Vcc;
所述点火信号处理模块包括J5接口,所述J5接口连接车体钥匙信号,同时连接电阻R72,电阻R72另一端到电阻R18和电容C58,电容C58另一端接地,在电阻R18另一端与地之间并接电阻R17和电容C14,同时作为控制信号连接到电源模块芯片U8的2脚;
所述通讯端口模块包括与车身总线局域网连接的二端接口J3,所述二端接口J3的1脚连接电阻R5,二端接口J3的2脚连接电阻R4,电阻R6和电容C3的一端同时连接到地,电阻R5、电阻R4、电容C3和电阻R6的另一端共同连接到电阻R3的一端,电阻R3的另一端连接到供电电压Vcc;端口J2的1、2端再分别连接到电感线圈L10的两端,L10另两端连接到信号转换芯片U3的6、7脚,U2的8脚接地,1和4脚分别连接微处理器模块CPU的P2.0和P2.1端口,电容C3跨接在供电电压Vcc和地之间。
5.根据权利要求4所述的24V电控液压助力转向泵ECU,其特征在于所述电源模块的芯片U8为芯片TLE4271-2,所述通讯端口模块的信号转换芯片U3为芯片6250PG。
6.根据权利要求4所述的24V电控液压助力转向泵ECU,其特征在于所述电压检测模块包括依次串接的电阻R18和电阻R17,所述电阻R17与电容C14并联,一端接地;所述电阻R18一端连接所述J9接口,另一端与电阻R17连接,电阻R18和电阻R17公共端连接CPU模块的P5.10端口;
所述电流采样模块包括采样电阻RS1,所述采样电阻RS1的两端分别连接电阻R62和R63的一端,所述电阻R62和R63的另一端连接R34和R35的一端,R34和R35的另一端连接到芯片U6的11和8脚,11和8脚对地跨接电容C44和C45,芯片U6的6和12 脚同时连接到CPU模块的P2.6端口;芯片U6的9脚连接电阻R73的一端,10脚连接电阻R59的一端,电阻R73另一端连接电阻R47和电容C42,电容C42另一端接地,电阻R47另一端接到比较器U7的负端6脚、电容C24和电阻R48,电容C24的另一端接地,电阻R59另一端连接电阻R31和电容C26,电容C26另一脚接地,电阻R31另一脚接到比较器U7的正端5脚,电阻R28和电阻R29将Vcc进行分压,将分压值接入U7的5脚,电阻R48另一端连接电阻R49、电容C43和电阻R46,电阻R46另一端接地,电阻R49和电容C43的另一端同时连接到比较器U7的7脚,U7的7脚通过电阻R56连接到CPU模块的P15.0端口,P15.0对地接电容C51;
所述温度检测模块包括热敏电阻R80,所述热敏电阻R80与电容C39并联,一端接地,另一端与电阻R26和CPU模块的P5.2端口同时相连,电阻R26另一端连接供电电压Vcc。
7.根据权利要求6所述的24V电控液压助力转向泵ECU,其特征在于所述电流采样模块的采样电阻RS1为锰铜材料制成的阻值毫欧级的电阻。
8.根据权利要求1所述的24V电控液压助力转向泵ECU,其特征在于所述电机驱动模块包括驱动芯片U1和U2和U4,所述驱动芯片U1的3、5、13脚同时连接电阻R3和R4,电阻R4另一端接地,电阻R3另一端连接MOS管Q1控制端,U1的7、9、11脚同时连接电阻R1和R2,电阻R1另一端接地,电阻R2另一端连接MOS管Q2控制端,U2的3、5、13脚同时连接电阻R21和R22,电阻R22另一端接地,电阻R21另一端连接MOS管Q3控制端,U2的7、9、11脚同时连接电阻R19和R20,电阻R19另一端接地,电阻R20另一端连接MOS管Q4控制端,所述MOS管Q1、Q2、Q3和Q4的控制端分别对地接电容C2、C1、C20和C19,U1和U2的1和15 脚为使能端,受CPU模块的P10.1端口控制,U1的2、4和14脚同时连接U4的10脚, U1的6、10和12脚同时连接U4的11脚,U2的2、4和14脚同时连接U4的3脚, U2的6、10和12脚同时连接U4的4脚。
9.根据权利要求8所述的24V电控液压助力转向泵ECU,其特征在于所述电机驱动模块的驱动芯片U1和U2同为74HCT366D,U4为HEC4093BT。
说明书
技术领域
本实用新型涉及到新能源汽车车控技术领域,具体涉及24V电控液压助力转向泵ECU。
背景技术
为了节能减排,发展低碳经济,参与汽车产业格局第四轮重构,跟上世界汽车发展水平,中国从2001年就开始通过相关扶植政策推动新能源汽车产业发展。大力推动新能源汽车的生产和销售,减少燃油汽车尾气排放总量,降低对人们日常活动直接影响,保证人们的生活质量,成为了国家的长期战略目标。随着国家对新能源汽车市场的整治与规范,出台了一系列的相关政策和法规,近年来新能源汽车市场秩序、生产秩序以及服务秩序已经趋于正规。汽车生产过程中的零部件配置也逐渐朝着更为节能、环保、可靠的需求上靠拢。参照2018年的年度汽车市场报告,新能源汽车特别是中型商务电动汽车的市场占有量保持了一贯的坚挺,在我国现阶段技术和配套没有完善的情况下,已经显示出了较强的发展势头,确实成为交通运输领域的重要组成部分,供电电压为12V的电控液压助力转向泵已经在中小型商务车上得到了广泛应用。
但是就客户的具体使用情况统计,目前电动商务车在应用电子转向技术方面存在如下不足:
首先,供电电压为12V的电控液压助力转向泵的方案是作为轿车配套产品来投入使用的,与商务车相比,轿车车身重量较轻,转向时所需的电功率较小,转向时驾驶员手感轻便;而商务车在载货的情形下总体重量较重,需要有较大的转向功率。配备12V电控液压助力转向泵的新能源商务车在实际的操作过程中驾驶员会有扥手的感觉,这就是电控液压助力转向泵功率不够的原因造成的。
其次,商务车在转向过程中的电控液压助力转向泵大多数处在较大功率状态,由于是12V供电,其所产生电流较大,电路中产生的损耗也最大,这时就有大量的能源浪费,造成了不必要的损耗,并且,转向泵在极值状态下长期运行,极可能引起安全隐患,容易缩短泵的使用寿命,甚至烧毁电元器件,泵无法正常运行。
第三,多数车企在经历了几年的运营,制定了用24V取代12V作为整车供电方案,今后采用24V供电方案的商务车在使用原12V作为供电电压的转向泵时就必须先将24V电压转换成12V才能使用,这样的过程第一增加了成本,第二也相应增加了发生故障的隐患。
发明内容
针对上述情况,本实用新型的目的是提供一种24V电控液压助力转向泵ECU,使电控液压转向助力泵在24V电压时能够正常运行,在同等电功率下产生的电流下降,提高了助力转向泵的整体功率,做同等功的前提下大大降低了助力转向泵的损耗。
本实用新型的技术方案如下: 24V电控液压助力转向泵ECU,包括微处理器、电源模块、点火信号处理模块、通讯端口模块、电压检测模块、温度检测模块、电流采样模块、电机驱动模块,所述电源模块、点火信号处理模块、通讯端口模块、电压检测模块、温度检测模块、电流采样模块与微处理器输入信号连接,所述电机驱动模块与微处理器输出信号连接。
优选的,所述微处理器为英飞凌2000系列CPU模块,用于进行多种信号处理、数据运算、PWM驱动信号生成;
所述电源模块用于将车载电瓶电压变换为满足微处理器的工作电压;
所述点火信号处理模块用于将汽车点火信号接入并触发所述电源模块启动;
所述通讯端口模块用于将车身的CAN信号输入到微处理器中,同时将微处理器的运行状态反馈到车身电脑里,实现信息交换;
所述电压检测模块与微处理器信号连接,用于实时监视车载电瓶工作电压从而控制电机的运转;
所述电流采样模块用于将工作电流采样放大,用做微处理器作为判定负载的依据,过载时,控制电机停止工作;
所述温度检测模块用于对助力转向泵泵体工作温度的跟踪检测;
所述电机驱动模块用于将微处理器产生的PWM信号进行信号处理,对电机的运行状态进行控制。
优选的,所述微处理器为CPU芯片XC2336B。
优选的,所述电源模块包括芯片U8,所述芯片U8为芯片TLE4271-2,所述芯片U8的1脚连接到J9接口,所述J9接口连接车载电瓶,J9接口与地之间跨接电容C33和瞬态二极管D2;2脚接收来至外围的控制信号,3脚与CPU模块的/RSTIN端口相连,同时对地跨接电容C50;4脚接地;5脚电容C61,电容C61的另一端接地;6脚连接CPU模块P7.0端口;7脚为输出端,对地接电容C65和电容C53,电容C65和电容C53的正极连接电源Vcc;通过电源模块有效抑制,车身电压波动对ECU的影响,将车载电瓶电压变换为ECU需求的电压,为ECU提供电源。
所述点火信号处理模块包括J5接口,所述J5接口连接车体钥匙信号,同时连接电阻R72,电阻R72另一端到电阻R18和电容C58,电容C58另一端接地,在电阻R18另一端与地之间并接电阻R17和电容C14,同时作为控制信号连接到电源模块芯片U8的2脚,通过本模块出发电源模块的启动。
所述通讯端口模块包括与车身总线信号连接的二端接口J3,所述二端接口J3的1脚连接电阻R5,二端接口J3的2脚连接电阻R4,电阻R6和电容C3的一端同时连接到地,电阻R5、电阻R4、电容C3和电阻R6的另一端共同连接到电阻R3的一端,电阻R3的另一端连接到供电电压Vcc;端口J2的1、2端再分别连接到电感线圈L10的两端,另两端连接到信号转换芯片U3的6、7脚,U2的8脚接地,1脚和4脚分别连接微处理器模块P2.0和P2.1端口,电容C3跨接在供电电压Vcc和地之间,所述信号转换芯片U3为6250PG,所采用的芯片U3为通信端口模块CAN信号转换芯片,作用是将微处理器模块CPU的状态信号转换成通信端口模块CAN信号,发送到车身总线,同时将车身总线与转向关联的CAN信号转换成可识别信号,完成信息交换。
所述电压检测模块包括依次串接的电阻R18和电阻R17,所述电阻R18连接所述J9接口,所述电阻R17并接电容C14,电阻R17和电容C14的一端连接CPU模块的AN4脚,电阻R17和R18将J9端引入的电瓶电压分压,输入到CPU模块的P5.10端口,实时监视工作电压,过高或过低都控制电机停止工作。
所述电流采样模块包括采样电阻RS1,所述采样电阻RS1为锰铜材料制成的阻值毫欧级的电阻,采样电阻RS1的两端分别连接电阻R62和R63的一端,所述电阻R62和R63的另一端连接R34和R35的一端,R34和R35的另一端连接到芯片U6的11和8脚,11和8脚对地跨接电容C44和C45,芯片U6的6和12 脚同时连接到CPU模块的P2.6端口;芯片U6的9脚连接电阻R73的一端,10脚连接电阻R59的一端,电阻R73另一端连接电阻R47和电容C42,电容C42另一端接地,电阻R47另一端接到比较器U7的负端6脚、电容C24和电阻R48,电容C24的另一端接地,电阻R59另一端连接电阻R31和电容C26,电容C26另一脚接地,电阻R31另一脚接到比较器U7的正端5脚,电阻R28和电阻R29将Vcc进行分压,将分压值接入U7的5脚,电阻R48另一端连接电阻R49、电容C43和电阻R46,电阻R46另一端接地,电阻R49和电容C43的另一端同时连接到比较器U7的7脚,U7的7脚通过电阻R56连接到CPU模块的P15.0端口,P15.0对地接电容C51。
所述温度检测模块包括热敏电阻R80,其特性为负温度系数,温度越高阻值越小,所述热敏电阻R80与电容C39并联,一端接地,另一端与电阻R26和CPU模块的P5.2端口同时相连,电阻R26另一端连接供电电压Vcc,热敏电阻R80和电阻R26将Vcc进行分压,将分压值输入微处理器模块中,通过电压值实时监测对应的工作温度。
所述电机驱动模块包括驱动芯片U1和U2,两芯片型号选用了74HCT366D,所述驱动芯片U1的3、5、13脚同时连接电阻R3和R4,电阻R4另一端接地,电阻R3另一端连接MOS管Q1控制端,U1的7、9、11脚同时连接电阻R1和R2,电阻R1另一端接地,电阻R2另一端连接MOS管Q2控制端,U2的3、5、13脚同时连接电阻R21和R22,电阻R22另一端接地,电阻R21另一端连接MOS管Q3控制端,U2的7、9、11脚同时连接电阻R19和R20,电阻R19另一端接地,电阻R20另一端连接MOS管Q4控制端,所述MOS管Q1、Q2、Q3和Q4的控制端分别对地接电容C2、C1、C20和C9。
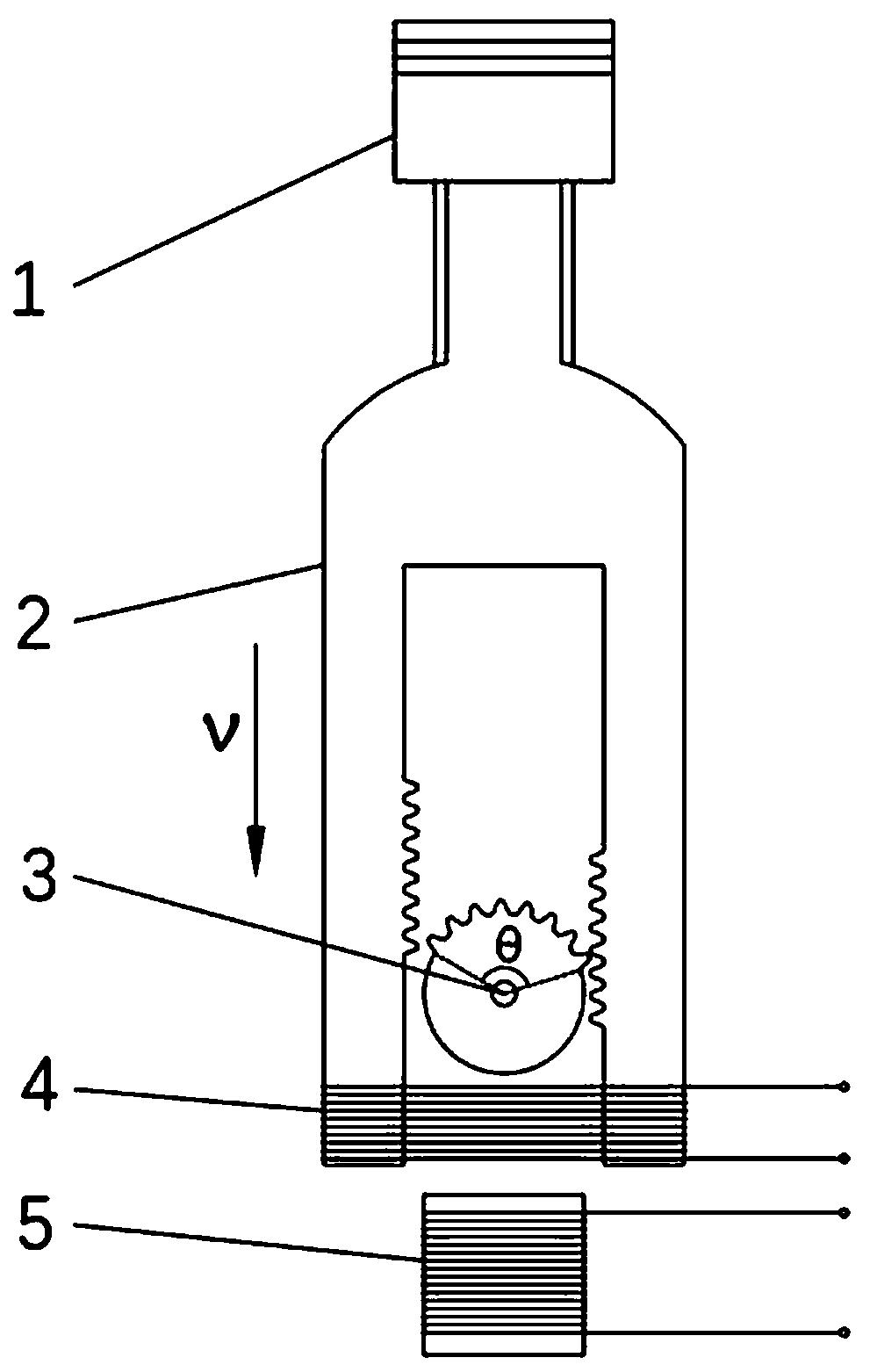
本实用新型的ECU,车载24V电瓶为本实用新型24V电控液压助力转向泵ECU和泵体构成的总成提供电源,点火信号处理模块将汽车点火信号触发电源模块启动,输出5V电压供给微处理器模块,使微处理器正常工作,然后微处理器通过电机驱动模块驱动直流电机正常运转,带动电机所连液压泵工作,这时微处理器随时接受来至通信端口模块CAN通讯发来的转向信号,改变直流电机转速,与之连接液压泵压缩流过的液压油产生高压形成推力,即为转向助力,在ECU的运行过程中设定其工作温度小于120℃,工作电压在19V~28V之间,电流极值≤50A,一旦异常,导致任一值超限,即停止工作。
通过本实用新型24V电控液压助力转向泵ECU,与对应的直流电机支架相连,完成对MOS管的控制,使与之配套的直流电机可控运转,实现驾驶员对24V电控液压助力转向泵的有效控制,最终达到汽车转向时,该电控液压助力转向泵为驾驶员提供转向助力。
本实用新型为驾驶员提供了一款转向性能和安全性能兼备的电动液压转向泵的ECU,采用该ECU的转向助力泵具有驱动功率大、运行稳定、实施方案具有可操作性等特点,本发明的ECU与电机驱动支架、电机定子和转子以及液压齿轮泵有机组合,构成一款性能独立的汽车转向助力总成。
本控制器设计尺寸,能够很轻松的安装在泵体中,替换过程中不影响外部安装。
附图说明
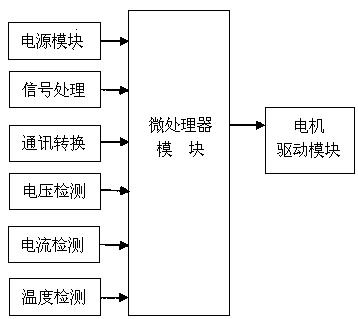
图1为本实用新型ECU组成连接框图;
图2为本实用新型电源模块电路图;
图3为本实用新型点火信号处理模块电路图;
图4为本实用新型通信端口模块电路图;
图5为本实用新型电压检测模块电路图;
图6为本实用新型电流采样模块电路图;
图7为本实用新型温度检测模块电路图;
图8为本实用新型电机驱动模块电路图;
图9为本实用新型主控微处理器模块CPU及外围模块电路图;
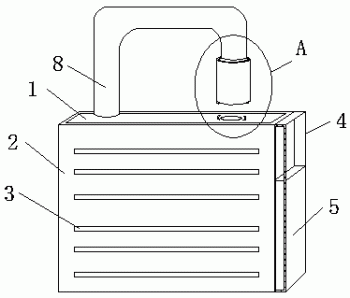
图10为包含本实用新型24V电控液压助力转向泵ECU的转向总成与整车连接图。
具体实施方式
以下结合附图对本实用新型的技术方案进行详细描述:
如图1所示,本实用新型24V电控液压助力转向泵ECU,包括微处理器、电源模块、点火信号处理模块、通讯端口模块、电压检测模块、电流采样模块、温度检测模块,电机驱动模块,所述电源模块、点火信号处理模块、通讯端口模块、电压检测模块、电流采样模块、温度检测模块与微处理器输入信号连接,所述电机驱动模块与微处理器输出信号连接。
具体实施时,如图10所示,电源模块连接到24V车载电瓶BAT、点火信号处理模块连接到车身钥匙控制信号Ig,通信端口模块连接到车身CAN总线上,电机驱动模块连接直流电机,直流电机连接液压齿轮泵。
如图2所示,电源模块包括供电芯片U8,供电模块U8为电源芯片TLE4271-2,1脚连接到J9,J9与地之间跨接电解电容C33和瞬态二极管D2,D2用于消除静电效应、浪涌电流和噪音等特别是车身电瓶对控制单元的干扰;2脚接收来至外围的控制信号;3脚为复位输出端,与微处理器模块CPU的62脚相连,同时对地跨接电容C50;4脚接地;5脚接电容C61,电容C61的另一端接地;6脚为看门狗控制输入端,连接微处理器模块CPU的38脚;7脚为输出端,对地接电容C65和电容C53,本模块有效抑制车身电压波动对ECU的影响,将车载24V电瓶电压输入U8的1脚,经过内部转换,变换为+5V的电压,有7脚输出,为整个控制单元提供电源。
如图3所示,所述点火信号处理模块包括J5接口,所述J5接口连接车体钥匙信号,同时连接电阻R72,电阻R72另一端到电阻R18和电容C58,电容C58另一端接地,在电阻R18另一端与地之间并接电阻R17和电容C14,同时作为控制信号连接到电源模块芯片U8的2脚;通过本模块驱动电源模块的启动。
如图4所示,所述通讯端口模块包括与车身总线信号连接的二端接口J3,所述二端接口J3的1脚连接电阻R5,二端接口J3的2脚连接电阻R4,电阻R6和电容C3的一端同时连接到地,电阻R5、电阻R4、电容C3和电阻R6的另一端共同连接到电阻R3的一端,电阻R3的另一端连接到供电电压Vcc;端口J2的1、2端再分别连接到电感线圈L10的两端,另两端连接到信号转换芯片U3的6、7脚,U2的8脚接地,1和4脚分别连接微处理器模块CPU的P2.0和P2.1端口,电容C3跨接在供电电压Vcc和地之间,所述信号转换芯片U3为芯片6250PG,本模块的芯片U3为通信端口模块CAN信号转换芯片,作用是将微处理器模块CPU的状态信号转换成通信端口模块CAN信号,发送到车身总线,同时将车身总线与转向关联的CAN信号转换成可识别信号,完成信息交换,保证了转向泵的正常运转。
如图5所示,所述电压检测模块包括依次串接的电阻R18和电阻R17,所述电阻R17并接电容C14,一端接地;所述电阻R18连接所述J9接口,电阻R18、R17和电容C14的公共端连接CPU模块的P5.10端口。所述R17和R18将J9端引入的电瓶电压分压,输入到CPU的P5.10端口,实时监视工作电压,过高或过低都会关断PWM信号输出,停止直流电机工作。
如图6所示,所述电流采样模块包括采样电阻RS1,其阻值很小,毫欧级,采用锰铜材料,用于采集流经的电流值,所述采样电阻RS1的两端分别连接电阻R62和R63的一端,所述电阻R62和R63的另一端连接R34和R35的一端,R34和R35的另一端连接到芯片U6的11和8脚,11和8脚对地跨接电容C44和C45,芯片U6的6和12 脚同时连接到CPU的端口P2.6;芯片U6的9脚连接电阻R73的一端,10脚连接电阻R59的一端,电阻R73另一端连接电阻R47和电容C42,电容C42另一端接地,电阻R47另一端接到比较器U7的负端6脚、电容C24和电阻R48,电容C24的另一端接地,电阻R59另一端连接电阻R31和电容C26,电容C26另一脚接地,电阻R31另一脚接到比较器U7的正端5脚,电阻R28和电阻R29将Vcc进行分压,将分压值接入U7的5脚,电阻R48另一端连接电阻R49、电容C43和电阻R46,电阻R46另一端接地,电阻R49和电容C43的另一端同时连接到比较器U7的7脚,U7的7脚通过电阻R56连接到CPU模块的P15.0端口,P15.0对地接电容C51;通过RS1采样的初始信号进入电子开关U6,型号为HEC4066BT,通过CPU控制U6的选择性通断,其目的是消除负载电流波动对后级电路电特性影响;U7为集成运放,型号为MCP6272,将采样电信号进行放大,由P15.0端口进入CPU,然后经过内部运算比较判定是否超限。
如图7所示,所述温度检测模块包括热敏电阻R80,所述热敏电阻R80与电容C39并联,一端接地,另一端与电阻R26和CPU模块的P5.2端口同时相连,电阻R26另一端连接供电电压Vcc,所述热敏电阻R80和电阻R26将Vcc进行分压,将分压值输入到CPU模块的P5.2端口,分压值对地并接电容C39进行滤波,通过热敏电阻R80对泵体工作温度的跟踪,可以有效避免较大的故障发生。
如图8所示,所述电机驱动模块包括驱动芯片U1和U2和U4,所述驱动芯片U1的3、5、13脚同时连接电阻R3和R4,电阻R4另一端接地,电阻R3另一端连接MOS管Q1控制端,U1的7、9、11脚同时连接电阻R1和R2,电阻R1另一端接地,电阻R2另一端连接MOS管Q2控制端,U2的3、5、13脚同时连接电阻R21和R22,电阻R22另一端接地,电阻R21另一端连接MOS管Q3控制端,U2的7、9、11脚同时连接电阻R19和R20,电阻R19另一端接地,电阻R20另一端连接MOS管Q4控制端,所述MOS管Q1、Q2、Q3和Q4的控制端分别对地接电容C2、C1、C20和C19。CPU模块的脚P2.7和P2.8为 CPU模块生成的PWM信号,脚P10.4、P10.5、P10.6和P10.7为电机相位切换时机信号,受控于外接霍尔传感器,霍尔传感器用于检测电机磁极的位置,根据磁极的极性产生脉冲信号。由两组霍尔传感器产生的高低电平组成00、01、11和10四种状态切换时机。六路信号接入U4进行逻辑组合,U4为四个与非门HEC4093BT, 10、11、3和4脚为U4与非门四路输出脚,10脚同时连接U1的2、4和14脚,11脚同时连接U1的6、10和12脚,3脚同时连接U2的2、4和14脚,4脚同时连接U2的6、10和12脚,U1和U2的1和15 脚为使能端,受CPU模块的P10.1端口控制,MOS管Q1、Q2、Q3和Q4分别串接在电机的4个绕组里,设定为A、B、C、D四个相位,通过控制四MOS管的通断来实现四组线圈加电时机,使电机可控运转。
如图9所示,微处理器模块CPU及外围连接,微处理器模块CPU为Infineon2000系列微处理器模块,晶体值为4M,连接在60和61之间,温度检测信号连接到15脚,通信端口模块CAN信号连接到串口25和26脚,信号转换芯片U3选用型号为6250PG,电压检测信号连接到21脚。
本实用新型中的Infineon2000系列微处理器模块CPU,管脚1、17、33、49、13接地;4脚连接电阻R7,电阻R7另一端接地;脚48、50、32、34、16、18、2、12、64、9和3连接供电电压Vcc,各管脚对地并接电容C62、电容C63、电容C11、电容C13、电容C15、电容C16、电容C8、电容C5、电容C30和电容C17;管脚24、41、57相连,同时对地并接电容C67、电容C68、电容C69;6脚对地连接电容C66; 60、61脚连接晶体并分别对地连接电容C48和电容C49;管脚63连接以上拉接电阻R8;15脚温度判断信号;55和54为时钟和数据信号线,脚37和42接收来至霍尔的脉冲信号,管脚30、31、35和36输出PWM信号,脚40和38决定了电流采样时间,脚44、45、46、47分别作为四项驱动的许可信号,39脚用于关闭四路驱动信号。
如图10所示,转向总成与整车连接图,包括电信号连接和液压油路连接。电信号含有车载24V电瓶、钥匙信号、CAN通讯,作为选项,本ECU可以接收转向角传感器发来的转向角信号,CPU进行分析运算,输出相应指令;车身转向供油系统高压和低压油路分别连接总成的液压油输出口和回油口。
本实用新型的24V电控液压助力转向泵ECU,用于汽车运行时为驾驶员提供转向助力,汽车启动后,所涉ECU点火信号处理模块将汽车点火信号接入并触发电源模块启动,输出5V电压供给微处理器模块,使微处理器开始工作,初始化完成后ECU驱动直流电机开始运转。此时的转速为基础转速。通过通讯模块CPU随时准备接受来至车身CAN总线的转向信号,当转向发生时,ECU驱动电机运行加速,液压泵中油压改变,推力形成,驾驶员转向时依靠获得的来至电控液压助力转向泵的转向助力,可以轻松转向;一旦转向完成,转向助力也随之消失,等待下一次转向发生,汽车停止运行后,本ECU也随钥匙信号消失而停止工作。
本ECU的工作条件为:工作温度小于120℃,工作电压在19V~28V之间,电流极值≤50A,ECU在工作过程中时时检测温度、电压和电流的实际值,任一相超出允许范围,CPU立即发出指令,终止电机工作,避免损失扩大。
24V电控液压助力转向泵ECU专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0