







专利摘要
本实用新型涉及一种用于火箭回收的机械手,主要用于一级火箭的回收,机械手结构包括手爪、手臂、着陆平台、大缓冲液压缸、小缓冲液压缸、驱动液压缸、伸缩式悬臂梁和伸缩式支撑腿。伸缩式悬臂梁和伸缩式支撑腿固连,伸缩式悬臂梁与驱动液压缸、驱动液压缸与手臂、手臂与底部平台间均通过圆柱销连接,大缓冲液压缸和小缓冲液压缸位于底部平台上;火箭着陆时伸缩式悬臂梁和伸缩式支撑腿由收起状态转为打开状态,驱动液压缸驱动手臂打开,当火箭降落到着陆平台时,驱动液压缸运动使手臂收拢,实现火箭的着陆缓冲。本机械手缓冲性能优异,安全性能高,结构简单,成本较低,可重复使用,能实现火箭着陆时的自动扶正。
权利要求
1.一种用于火箭回收的机械手,其特征在于,包括手爪、手臂、着陆平台、小缓冲液压缸、大缓冲液压缸、驱动液压缸、伸缩式悬臂梁和伸缩式支撑腿,
所述手爪与所述手臂固连,所述手臂的第一连接端通过圆柱销与底部平台连接,所述手臂的第二连接端通过圆柱销与所述驱动液压缸的上杆相连,所述驱动液压缸的缸体通过所述圆柱销与所述伸缩式悬臂梁相连,所述伸缩式悬臂梁与所述伸缩式支撑腿相连;
所述着陆平台与所述小缓冲液压缸的第一端相连,所述小缓冲液压缸的第二端与所述大缓冲液压缸相连,所述大缓冲液压缸与所述底部平台相连,以及
所述手爪的数量、所述手臂的数量、所述驱动液压缸的数量、所述伸缩式悬臂梁的数量、所述伸缩式支撑腿的数量均相等,各装置沿所述陆平台圆周方向均匀分布。
2.根据权利要求1所述的用于火箭回收的机械手,其特征在于,所述手爪和所述伸缩式悬臂梁大臂能同步展开及同步收拢,所述伸缩式悬臂梁的伸缩运动能带动所述驱动液压缸,以驱动所述手臂实现相应展开和收拢,所述手臂展开时为工作状态,收拢时为非工作状态,以便于运输。
3.根据权利要求2所述的用于火箭回收的机械手,其特征在于,所述伸缩式悬臂梁采用两级结构,小臂先伸出到达限定位置,大臂继续向前与所述手爪同步伸出至限定位置,所述伸缩式支撑腿再向下伸出至限定位置。
4.根据权利要求1所述的用于火箭回收的机械手,其特征在于,所述大缓冲液压缸的数量为一个,所述大缓冲液压缸的轴线与所述着陆平台的轴线重合,所述小缓冲液压缸的数量为四个,所述小缓冲液压缸设于所述着陆平台半径三分之二处,且沿所述陆平台圆周方向均匀分布。
5.根据权利要求1所述的用于火箭回收的机械手,其特征在于,所述手爪的数量为三个,所述手爪为圆心角120°的弧形圆筒,三个手爪合拢时,能形成完整圆筒。
6.根据权利要求4所述的用于火箭回收的机械手,其特征在于,所述小缓冲液压缸与所述大缓冲液压缸能缓冲火箭的着陆冲击,保证火箭的安全稳定着陆。
说明书
技术领域
本实用新型涉及航空航天技术领域,具体涉及一种用于火箭回收的机械手。
背景技术
研究可重复运载火箭的发射和回收,主要的目的就是为了降低发射成本。众所周知,一直以来航天发射成本居高不下,运输1kg的物体上天,成本大约是1至2万美元,主要是因为运载火箭是一次性使用的原因。据我国航天专家庞之浩所介绍,运载火箭第一级回收成功,可节约成本80%。
国外研究火箭回收的典型代表为美国太空探索公司(SpaceX),经历四次火箭回收失败后,终于实现了回收火箭的平稳着陆,“猎鹰9”号运载火箭在将货运飞船送入太空后,一级火箭垂直降落在海上平台。“猎鹰9”号回收采用的是火箭发动机反推减速和海上平台接收,着陆支架减震模式。这种方式下,火箭着陆时易发生偏斜、倾倒,甚至产生爆炸。
针对火箭回收问题,设计了一种用于火箭回收的机械手,这种机械手可重复使用,并且在火箭着陆时即使发生小角度的偏斜,也可实现自动扶正。实现火箭的安全平稳着陆。
实用新型内容
为了实现火箭回收的安全着陆,提供了一种用于火箭回收的机械手,它提供了一种新的火箭回收着陆方法,能实现火箭回收的安全着陆。
本实用新型提供一种用于火箭回收的机械手,包括手爪、手臂、着陆平台、小缓冲液压缸、大缓冲液压缸、驱动液压缸、伸缩式悬臂梁和伸缩式支撑腿,所述手爪与所述手臂固连,所述手臂的第一连接端通过所述圆柱销与底部平台连接,所述手臂的第二连接端通过所述圆柱销与所述驱动液压缸的上杆相连,所述驱动液压缸的缸体通过所述圆柱销与所述伸缩式悬臂梁相连,所述伸缩式悬臂梁与所述伸缩式支撑腿相连;所述着陆平台与所述小缓冲液压缸的第一端相连,所述小缓冲液压缸的第二端与所述大缓冲液压缸相连,所述大缓冲液压缸与所述底部平台相连;所述手爪的数量、所述手臂的数量、所述驱动液压缸的数量、所述伸缩式悬臂梁的数量、所述伸缩式支撑腿的数量均相等,各装置沿所述陆平台圆周方向均匀分布。
优选地,所述手爪、所述手臂和所述伸缩式悬臂梁大臂能同步展开及同步收拢,所述伸缩式悬臂梁的伸缩运动能带动所述驱动液压缸,以驱动所述手臂实现相应展开和收拢,所述手臂展开时为工作状态,收拢时为非工作状态,以便于运输。
优选地,所述伸缩式悬臂梁采用两级结构,小臂先伸出到达限定位置,大臂继续向前与所述手爪同步伸出至限定位置,所述伸缩式支撑腿再向下伸出至限定位置。
优选地,所述大缓冲液压缸的数量为一个,所述大缓冲液压缸的轴线与所述着陆平台的轴线重合,所述小缓冲液压缸的数量为四个,所述小缓冲液压缸设于所述着陆平台半径三分之二处,且沿所述陆平台圆周方向均匀分布。
优选地,所述手爪的数量为三个,所述手爪为圆心角120°的弧形圆筒,三个手爪合拢时,能形成完整圆筒。
优选地,所述小缓冲液压缸与所述大缓冲液压缸能缓冲火箭的着陆冲击,保证火箭的安全稳定着陆。
本实用新型的有益效果如下:
(1)该装置用于陆上火箭回收,相比于其它回收装置,该机械手独立设置,机械手着陆平台下部液压缸具有减震缓冲功能,在火箭着陆瞬间合拢抱紧火箭筒,实现稳着陆;
(2)受力较好,驱动力可控,火箭着陆即使有小角度的偏斜,机械手也能自动扶正;
(3)结构简单,机动性好,成本较低,可重复使用。
附图说明
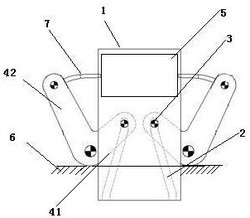
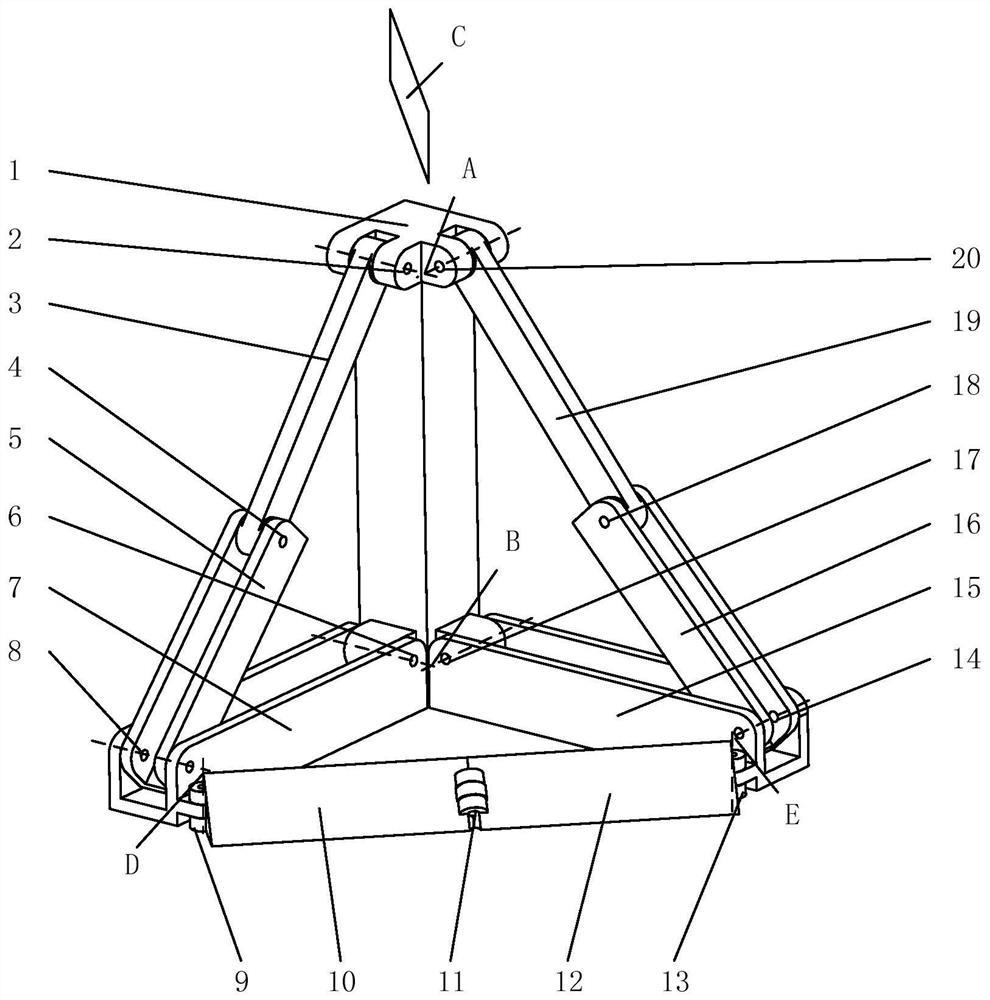
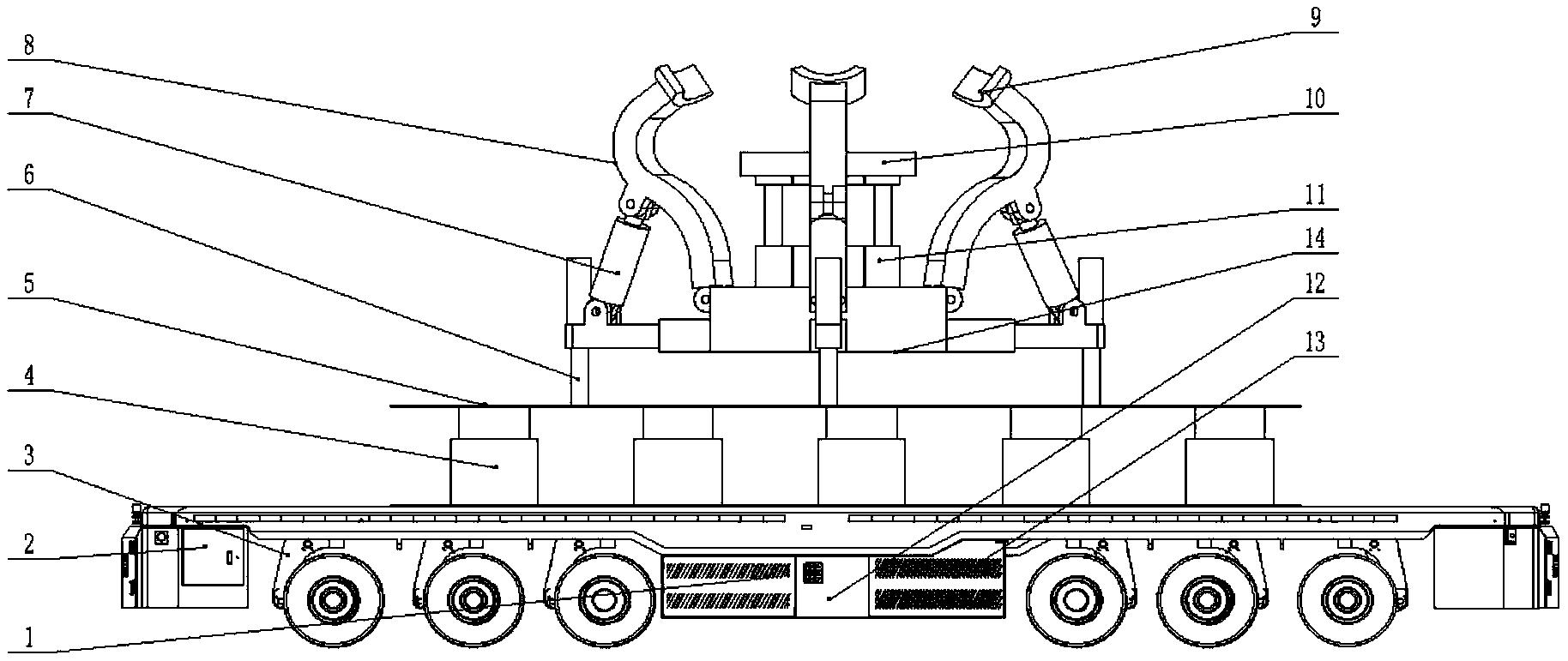
图1为机械手装置的正视图;以及
图2为机械手装置的俯视图。
主要附图标记:
手爪1;手臂2;着陆平台3;小缓冲液压缸4;大缓冲液压缸5;驱动液压缸6;伸缩式悬臂梁7;伸缩式支撑腿8;圆柱销9。
具体实施方式
为详尽本实用新型之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
如图1所示,包括手爪1、手臂2、着陆平台3、小缓冲液压缸4、大缓冲液压缸5、驱动液压缸6、伸缩式悬臂梁7和伸缩式支撑腿8。手爪1的数量与手臂2的数量为多个,各手爪1合拢时,能形成完整圆筒,手爪1的高度与手臂2的宽度相等,手臂2的末端为弧形圆筒,直径与手爪1的圆弧外径相等,手爪1与手臂2一一对应固连,手臂2的外形类似于J形,手臂2下端的第一连接端通过圆柱销9与底部平台的铰链座连接,手臂2中部的第二连接端通过圆柱销9与驱动液压缸6的上杆相连,驱动液压缸6的缸体通过圆柱销9与伸缩式悬臂梁7的铰链座相连,伸缩式悬臂梁7末端设有通孔,并通过通孔与伸缩式支撑腿8垂直固连,伸缩式悬臂梁7的另一端与底部平台相连,且能实现相对移动;着陆平台3的底面与各小缓冲液压缸4的第一端相连,小缓冲液压缸4的第二端与大缓冲液压缸5相连,大缓冲液压缸5与底部平台相连,各液压缸统一由液压站供油。
手爪1的数量、手臂2的数量、驱动液压缸6的数量、伸缩式悬臂梁7的数量、伸缩式支撑腿8的数量均相等,各装置沿陆平台圆周方向均匀分布,优选地,伸缩式支撑腿8的数量为三个,以形成三角形稳定支撑,则手爪1的数量与也为三个,则手爪1为圆心角120°的弧形圆筒,三个手爪1合拢时,能形成完整圆筒。
手爪1、手臂2和伸缩式悬臂梁7能同步展开及同步收拢,伸缩式悬臂梁7的伸缩运动能带动驱动液压缸6,以驱动手臂2实现相应展开和收拢,收拢时为非工作状态,以便于运输,手臂2展开时为工作状态,伸缩式悬臂梁7采用两级结构,小臂先伸出到达限定位置,大臂继续向前伸出至限定位置,伸缩式支撑腿8再向下伸出至限定位置。
大缓冲液压缸5的数量为一个,大缓冲液压缸5的轴线与着陆平台3的轴线重合,小缓冲液压缸4的数量为四个,小缓冲液压缸4设于着陆平台3半径三分之二处,且沿着陆平台圆周方向均匀分布,小缓冲液压缸4与大缓冲液压缸5能缓冲火箭的着陆冲击,保证火箭的安全稳定着陆。
以下结合实施例对本实用新型进一步描述:
参见图1和图2,本实用新型涉及一种用于火箭回收的机械手,包括三个手爪1、三个手臂2、着陆平台3、六个小缓冲液压缸4、一个大缓冲液压缸5、三个驱动液压缸6、三个伸缩式悬臂梁7和三个伸缩式支撑腿8。
机械手平台下部采用伸缩式悬臂梁7和伸缩式支撑腿8,伸缩式悬臂梁7和伸缩式支撑腿8刚性固结在一起,伸缩式悬臂梁7与驱动液压缸6通过圆柱销9连接,驱动液压缸6与手臂2通过圆柱销9连接,手臂2通过圆柱销9与机械手装置底端连接,小缓冲液压缸6和大缓冲液压缸5呈上下结构设于机械手装置底端平台上,运输时将伸缩式悬臂梁7和伸缩式支撑腿8收起,到达指定位置时,伸缩式悬臂梁7和伸缩式支撑腿8可以自动打开,对驱动液压缸6起到支撑作用,与此同时,在驱动液压缸6的作用下将三个手臂2同步打开。当火箭降落到着陆平台3时,位于下部的大缓冲液压缸5和小缓冲液压缸4收缩,以缓冲火箭的着陆冲击,同时三个手臂2在驱动液压缸6的作用下开始收拢,通过三个手爪1将一级火箭完全抱紧,经移动设备移动至下一工位,三个手臂2在驱动液压缸6的作用下同步打开。
以上是本申请的优选实施方式,不以此限定本实用新型的保护范围,应当指出,对于该技术领域的普通技术人员来说,在不脱离本技术原理前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本申请的保护范围。
用于火箭回收的机械手专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



动态评分
0.0