








专利摘要
本发明提供一种成形磨削齿向修形误差补偿方法,该方法基于成形磨削机理,综合考虑左右齿面空间接触线形态对齿面扭曲和齿面相对扭曲的影响规律,以及砂轮安装角与接触线形态之间的影响关系,首先建立齿面扭曲和齿面相对扭曲大小的评价标准,然后通过特定算法对工件端截面修形量即各截面齿形的法向误差进行优化,以最大程度地减小齿面整体修形误差,并通过优化砂轮安转角同时改变左右齿面空间接触线的倾斜量和中心偏移量,进一步达到减小齿面扭曲和齿面相对扭曲误差的目的。
说明书
技术领域
本发明属于齿轮精密加工领域,具体涉及高精度齿向修形斜齿轮的加工领域。
背景技术
成形磨齿加工具有磨齿质量好、磨削效率高等优点,是一种广泛运用的齿轮精加工硬齿面修形工艺。为了减少齿轮接触应力集中,降低传动噪音,提高齿轮承载能力和疲劳强度,延长其服役寿命,车间生产中通常采用齿向修形的方法改善齿轮接触特性。理论上讲,采用成形磨削齿向修形进行齿宽方向的截面磨削时,应采用不同截形的砂轮,然而实际加工中往往只能采用同一种砂轮磨削整个齿面,从而产生齿面误差。特别是斜齿轮齿向修形过程中,空间接触线形态不断变化,且齿宽方向不同截面的修行量各不相同,进而导致同一侧齿面左右部分及不同侧齿面产生不对称的过修和欠修现象。
针对这一科学问题,国内外专家学者在成形磨削齿向修形时齿面法向修形误差的补偿方法和齿向修形的磨削扭曲补偿方法方面开展了部分研究工作,并取得了一定的研究成果。但其所提出的补偿方法主要存在以下两方面问题:
(1)主要针对齿面各点法向修形误差值进行补偿,而没有建立齿面扭曲和左右齿面相对扭曲大小的有效评价方法。该类研究虽然可以一定程度上减小齿面修形误差或减小局部扭曲,但对整个齿面的扭曲误差减小效果不明显;
(2)只考虑了单侧齿面误差的补偿,而没有考虑左右齿面的相对扭曲即左右齿面鼓形相对偏移量。该类研究虽然减小了单侧齿面的齿面修形误差,却未能补偿另一侧齿面修形误差,甚至出现另一侧齿面误差增大的情况。
简而言之,目前提出的齿向修形齿面误差补偿方法存在齿面扭曲和左右齿面相对扭曲大小的评价标准不完善、补偿效果不明显、未能补偿齿面相对扭曲等缺陷。因此,迫切需要建立齿面扭曲和左右齿面相对扭曲大小的评价方法,以提高成形磨削齿向修形精度,从而改善磨削加工后齿轮的接触特性。这对齿轮的减振、降噪及提高使用寿命具有重要的现实意义,并具有广阔的应用前景。
发明内容
本发明的目的是提供一种成形磨削齿向修形误差的补偿方法,实现齿面扭曲和左右齿面相对扭曲等齿面误差的补偿。
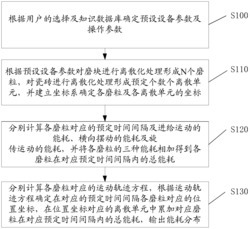
为实现本发明目的而采用的技术方案是这样的,一种成形磨削齿向修形误差补偿方法,包括如下步骤:
1)基于齿向修形附加运动的速度对成形磨削过程的影响机理,建立成形磨削齿向修形砂轮截形计算过程的通用空间几何数学模型;
1.1)利用多项式表达任意修形曲线,建立修形轨迹的通用数学表达式,即
kai=Σak(zi)=an(zi)n+an-1(zi)n-1+…+a0(zi)0(1)
并求得附加进给运动的进给量,即api=kaicosβb/sinαn(2)
其中,zi为砂轮沿齿轮轴向移动的距离,zi=pθ,p为齿轮螺旋参数,参变量θ为端截形从起始绕Z轴转过的角度;
kai为zi截面齿廓的法向修形量;
βb为基圆螺旋角;
αn为分度圆法向压力角;
a0、a1、…、an为多项式系数;
1.2)建立工件与砂轮空间接触线条件式的通用数学模型,即
联立通用接触条件式(3)和已知的齿面方程式即可求得接触线的通用数学模型;由于接触条件式(3)为超越方程,不易求出参变量θ和u的关系,此处采用计算接触线上各离散点的方式求解;
其中,θ和u为参变量;
a为砂轮与齿轮的中心距;
Σ为砂轮安装角;
rb为齿轮的基圆半径;
τ=σ0+u+θ+Δσ,其中σ0+Δσ是齿向修形时的齿槽半角,Δσ=api(zi)/rb=api(pθ)/rb;
api'(θ)为api(θ)对θ的导数,即附加运动的速度;
1.3)将接触线(x,y,z)绕刀具轴线回转即可得到砂轮回转面,利用坐标变换关系将接触线(x,y,z)转换到砂轮坐标系(X,Y,Z)中,建立砂轮回转面的通用模型,即
其中,X、Y、Z为各离散点在砂轮坐标系中的坐标值;
分别表示砂轮坐标系中各方向的单位向量;
1.4)建立砂轮轴向截形通用模型,即
其中,(X,Y,Z)为离散点,此处采用双圆弧平滑优化逼近的方法拟合砂轮截形;
参变量R表示砂轮截形中各截面的回转面半径;
1.5)根据公式(5)可以求得各截面磨削时所需要的砂轮轴向截形,选取齿宽中部1/2处的砂轮截形作为实际加工所用的砂轮截形,将砂轮截形绕轴线旋转360°即可建立砂轮的回转面方程;
2)建立齿面扭曲和齿面相对扭曲大小的评价标准和误差优化补偿函数;
2.1)根据步骤1)所建立的空间几何数学模型分析确定空间接触线形态与齿面扭曲和相对扭曲之间的关系,采用改变端截面修形量调整齿面整体修形误差,并采用改变砂轮安装偏角来优化接触线的倾斜量和偏移量;
设定待加工齿轮的任意齿的一侧齿面为实验面,通过后续的步骤得出该齿面的四个角落上的最大法向修形误差值为A、B、C、D,其中A与C为相对角落,B与D为相对角落;
然后建立评价标准函数:
f1(x)=|A|+|B|+|C|+|D|
f2(x)=|A-B|+|C-D|
f3(x)=|A-C|+|B-D|
其中,f1(x)的值作为齿面整体法向修形误差大小的评价标准;
f2(x)的值作为齿面扭曲大小的评价标准;
f3(x)值作为齿面相对扭曲大小的评价标准;
2.2)将函数f1(x)、f2(x)、f3(x)的评价标准结合权重系数优化法,建立多目标误差优化评价函数:
f=ω1f1(x)+ω2f2(x)+ω3f3(x)
=ω1(|A|+|B|+|C|+|D|)+ω2(|A-B|+|C-D|)+ω3(|A-C|+|B-D|)
f作为齿面扭曲和左右齿面相对扭曲误差的评价标准;
其中,ω1、ω2、ω3为权重系数值,各权重系数根据实际精度要求取值;
上述f1(x)、f2(x)、f3(x)和f的值越小表示优化效果越好;
3)建立成形磨削齿向修形齿面反求过程的通用空间几何数学模型;
3.1)根据选定的砂轮回转面,建立反求时的通用接触条件式,即
其中,f(R)为砂轮的轴向截形;
参变数φ表示砂轮回转面的旋转角度;
3.2)进行实际齿面的反求计算,即根据选取的砂轮廓形计算出成形磨削后齿面的方程:联立接触条件式(6)和砂轮回转面方程(4)求得此时的接触线,将接触线绕齿轮轴线作螺旋运动建立砂轮磨削的齿轮螺旋面通用模型,即
其中,R和φ满足条件式(6);xg、yg、zg分别表示螺旋面上X、Y、Z坐标的轨迹;
4)将反求的齿面和理论的齿面比较得到齿面各点法向修形误差即各端截面齿形法向方向的误差,从而获得齿面四个角落的最大法向误差值A、B、C、D,并根据步骤2)中的误差评价标准,求得误差评价函数值;
5)在给定范围内不断改变砂轮安转角和工件端截面修形量,重复上述步骤3)至步骤4),以给定步长进行寻优,找到误差评价函数值最小的端截面修形量和砂轮安装角,即为齿面扭曲和相对扭曲最小的最佳端截面修形量和砂轮安转角。
具体地,上述步骤2)包括如下的分析过程:
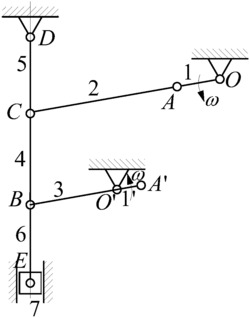
如图1所示,在斜齿轮成形磨削加工过程中,齿轮与砂轮之间形成一条相当于齿面修形等高线的空间接触线,亦即是说接触线上各点在某一时刻的修形量相等。齿向修形时,齿宽方向上不同截面的修形量不同,又由于接触线存在一定倾斜量S1,造成齿宽方向上的同一截面,在齿根部分和齿顶部分的修形量不相同。图1的左齿面中,理论上要求同一截面上的齿顶C点和齿根D点修形量相等,但由于接触线倾斜,C点处的修形量与C’点处的修形量相等,D点处的修形量与D’点处的修形量相等,即齿顶C处的修形量小于齿根D处的修形量。分析接触线倾斜对整个左齿面的影响,可知加工后的齿面上半部分齿顶C处修形量不足,齿面下半部分的齿顶A处却过修,从而使齿面产生扭曲现象。同理,右齿面也会产生齿面扭曲现象。且接触线的倾斜程度越大,左、右齿面的扭曲越大。此外,左右齿面的接触线还存在一定偏移量S2,使得齿面的鼓形发生偏移,而且左右齿面在同一截面的修形量也不相同,左右齿面产生相对扭曲现象。
因此,要减小齿面扭曲,必须同时减小左右齿面接触线的倾斜程度和偏离程度。而砂轮与齿轮的接触线形态主要受砂轮与齿轮中心距和砂轮安装偏角的影响,成形磨齿机的砂轮出于成本考虑是不会经常更换的,当砂轮直径一定时,中心距就确定了,而砂轮安装角则可以在不干涉条件下的一个范围内变化。所以,本发明采用改变砂轮安装偏角来优化接触线的倾斜量和偏移量,进而减小齿面扭曲和齿面相对扭曲。
经过上述分析后,可以进一步分析误差评价标准以及误差优化补偿函数。如图1所示,设左齿面四个角上的最大修形误差分别为A、B、C、D。接触线的倾斜程度越大,A与B和C与D的差值越大,齿面扭曲越大;左右齿面接触线的偏离程度越大,则相对鼓形偏移量越大,A与C和B与D的差值越大,齿面的相对扭曲也就越大。
因此,要减小齿面扭曲,提高齿面精度,不仅要减小A、B、C、D的值,还要同时减小A与B(C与D)的差值和A与C(B与D)的差值。
结合上述分析,本发明将(|a|+|b|+|c|+|d|)的值作为齿面整体法向修形误差大小的评价标准,(|a-b|+|c-d|)的值作为齿面扭曲大小的评价标准,将(|a-c|+|b-d|)的值作为齿面相对扭曲和鼓形相对偏移量大小的评价标准。最后,利用权重系数法,建立齿面各点法向修形误差、齿面扭曲和相对扭曲的多目标优化函数。
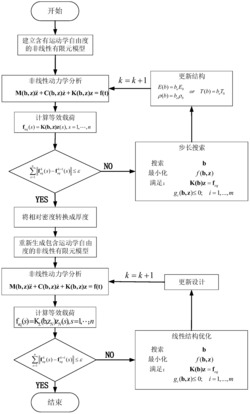
之后步骤即建立如图2所示的优化补偿算法流程,并通过Matlab编程,计算获得齿面扭曲和相对扭曲都较小的最优端截面修形量和砂轮安装角。然后将优化方法运用到实际齿轮成形磨削齿向修形中,进行端截面修形量和砂轮安装角的优化。
本发明的技术效果具有如下优点:
1.本发明建立的成形磨削齿向修形曲线和修形量通用计算公式,适合于任意大小的修形量和任意修形轨迹曲线,扩大了成形磨削齿向修形模型的通用性。
2.本发明建立的成形磨削齿向修形通用空间几何数学模型,包括齿向修形的通用接触线条件式、磨削后齿面方程等,考虑了齿向修形附加运动的速度对模型的影响,能够更准确地得到齿面各点修形误差。
3.本发明在计算得到工件和砂轮的空间接触线离散点后,通过双圆弧平滑优化逼近的方法拟合砂轮截形,使砂轮截形的计算精度更高。
4.本发明建立的齿面扭曲和齿面相对扭曲大小评价标准,对整个齿面的扭曲和相对扭曲大小评价更加准确,且适用于其他领域加工表面的扭曲误差评价。
5.本发明通过优化砂轮安装角改变接触线形态,以减小齿面扭曲和齿面相对扭曲,并通过优化端截面修形量最大程度减小齿面整体法向修形误差,使齿面扭曲和齿面相对扭曲的优化效果更加明显。
6.本发明采用权重系数优化方法,可根据实际加工要求,方便地调节各种误差的优化权重比例,得到更加符合条件的齿面精度。
附图说明
图1为为本发明建立齿面扭曲和左右齿面相对扭曲大小评价标准及说明图;
图2为本发明实现齿面扭曲和相对扭曲优化补偿的算法流程图;
图3为本发明优化前后齿向修形曲线对比图;
图4为本发明实例优化补偿前齿面法向误差等高线图;
图5为本发明实例优化补偿后齿面法向误差等高线图。
具体实施方式
下面结合附图和实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
实施例1:
一种成形磨削齿向修形误差补偿方法,包括如下步骤:
1)建立成形磨削齿向修形砂轮截形计算过程的通用空间几何数学模型;
1.1)利用多项式表达任意修形曲线,建立修形轨迹的通用数学表达式,即
kai=Σak(zi)=an(zi)n+an-1(zi)n-1+…+a0(zi)0(1)
并求得附加进给运动的进给量,即api=kaicosβb/sinαn(2)
其中,zi为砂轮沿齿轮轴向移动的距离,zi=pθ,p为齿轮螺旋参数,参变量θ为端截形从起始绕Z轴转过的角度;
kai为zi截面齿廓的法向修形量;
βb为基圆螺旋角;αn为分度圆法向压力角;
a0、a1、…、an为多项式系数;一般来说,齿向修形曲线用n<5的低次多项式就可以完全满足拟合要求;
1.2)建立工件与砂轮空间接触线条件式的通用数学模型,即
联立通用接触条件式(3)和已知的齿面方程式即可求得接触线的通用数学模型。由于接触条件式(3)为超越方程,不易求出参变量θ和u的关系,本发明采用计算接触线上各离散点的方式求解;
其中,θ和u为参变量;
a为砂轮与齿轮的中心距;
Σ为砂轮安装角;
rb为齿轮的基圆半径;
τ=σ0+u+θ+Δσ,其中σ0+Δσ是齿向修形时的齿槽半角,Δσ=api(zi)/rb=api(pθ)/rb;
api'(θ)为api(θ)对θ的导数(即附加运动的速度);
1.3)将接触线(x,y,z)绕刀具轴线回转即可得到砂轮回转面,利用坐标变换关系将接触线(x,y,z)转换到砂轮坐标系(X,Y,Z)中,建立砂轮回转面的通用模型。即
其中,X、Y、Z为各离散点在砂轮坐标系中的坐标值;
分别表示砂轮坐标系中各方向的单位向量;
1.4)建立砂轮轴向截形通用模型,即
其中,(X,Y,Z)为离散点,本发明采用双圆弧平滑优化逼近的方法拟合砂轮截形;参变量R表示砂轮截形中各截面的回转面半径;
1.5)根据公式(5)可以求得各截面磨削时所需要的砂轮轴向截形,本发明选取齿宽中部1/2处的砂轮截形作为实际加工所用的砂轮截形,将砂轮截形绕轴线旋转360°即可建立砂轮的回转面方程;
2)建立齿面扭曲和齿面相对扭曲大小的评价标准和误差优化补偿方法;
2.1)根据步骤1)所建立的空间几何数学模型分析确定空间接触线形态与齿面扭曲和相对扭曲之间的关系,采用改变端截面修形量调整齿面整体法向修形误差,并采用改变砂轮安装偏角来优化接触线的倾斜量和偏移量;
设定待加工齿轮的任意齿的一侧齿面为实验面,通过后续的步骤得出该齿面的四个角落上的最大法向修形误差值为A、B、C、D,其中A与C为相对角落,B与D为相对角落;
然后建立评价标准函数:
f1(x)=|A|+|B|+|C|+|D|
f2(x)=|A-B|+|C-D|
f3(x)=|A-C|+|B-D|
其中,f1(x)的值作为齿面整体法向修形误差大小的评价标准;
f2(x)的值作为齿面扭曲大小的评价标准;
f3(x)值作为齿面相对扭曲大小的评价标准;
2.2)将函数f1(x)、f2(x)、f3(x)的评价标准结合权重系数优化法,建立多目标误差优化评价函数:
f=ω1f1(x)+ω2f2(x)+ω3f3(x)
=ω1(|A|+|B|+|C|+|D|)+ω2(|A-B|+|C-D|)+ω3(|A-C|+|B-D|)
f作为齿面扭曲和左右齿面相对扭曲误差的评价标准;
其中,ω1、ω2、ω3为权重系数值,各权重系数根据实际精度要求取值;
上述f1(x)、f2(x)、f3(x)和f的值越小表示优化效果越好;
3)建立成形磨削齿向修形齿面反求过程的通用空间几何数学模型;
3.1)根据选定的砂轮回转面,建立反求时的通用接触条件式,即
其中,f(R)为砂轮的轴向截形;
参变量φ表示砂轮回转面的旋转角度;
3.2)进行实际齿面的反求计算,即根据选取的砂轮廓形计算出成形磨削后齿面的方程:联立接触条件式(6)和砂轮回转面方程(4)求得此时的接触线,将接触线绕齿轮轴线作螺旋运动建立砂轮磨削的齿轮螺旋面通用模型,即
其中,R和φ满足条件式(6);xg、yg、zg分别表示螺旋面上X、Y、Z坐标的轨迹;
4)将反求的齿面和理论的齿面比较得到齿面各点方向修形误差即各端截面齿形法向方向的误差,从而获得齿面四个角落的最大法向误差值A、B、C、D,并根据步骤2)中的误差评价标准,求得误差评价函数值;
5)在给定范围内不断改变砂轮安转角和工件端截面修形量,重复上述步骤3)至步骤4),以给定步长进行寻优,找到误差评价函数值最小的端截面修形量和砂轮安装角,即为齿面扭曲和相对扭曲最小的最佳端截面修形量和砂轮安转角。
实施例2:
本实施例为实施例1所述的方法的具体优化补偿实例。
具体地,选取有0.03mm全鼓形齿向修形要求的右旋斜齿轮作为实例,齿向修形曲线如图3中的虚线所示。齿轮的具体参数为:齿数az=75,法向模数mn=10mm,法向压力角αn=20°,螺旋角β=20°,变位系数xn=0,齿轮宽度B=120mm。
计算时,给定砂轮安装角的不干涉范围为68.5~71.5°,砂轮和齿轮的中心距为550mm。为便于提取齿面各点误差,将齿面沿齿宽方向均分11份,沿齿高方向均分15份,即可获得11*15个网格点。
利用Matlab中编好的优化算法,计算得到如下优化结果。优化后齿向修形曲线如图3中的实线所示,优化补偿前后齿面各点修形误差如表1和表2所示,其等高线如图4和图5所示。
优化前:砂轮安转角Σ=70°,齿轮端截面修形量δ=0mm。
优化后:砂轮安转角Σ=69.1°,齿轮端截面修形量δ=0.032mm。
表1优化补偿前齿面各点法向修形误差(单位:um)
权重系数值分别取:ω1=0.1,ω2=0.6,ω3=0.3
优化补偿前:
齿面整体法向修形误差函数值:f1(x)=|a|+|b|+|c|+|d|=28.5116
齿面扭曲函数值:f2(x)=(|a-b|+|c-d|)=22.5518
齿面相对扭曲函数值:f3(x)=(|a-c|+|b-d|)=19.6438
总误差优化函数值:f=ω1f1(x)+ω2f2(x)+ω3f3(x)=22.2754
表2优化补偿后齿面各点修形误差(单位:um)
优化补偿后:
齿面整体法向修形误差函数值:f1(x)=|a|+|b|+|c|+|d|=14.7846
齿面扭曲函数值:f2(x)=(|a-b|+|c-d|)=10.6322
齿面相对扭曲函数值:f3(x)=(|a-c|+|b-d|)=8.8446
总误差优化函数值:f=ω1f1(x)+ω2f2(x)+ω3f3(x)=10.5112
由上述优化数据和误差等高线图可知,优化补偿后齿面法向修形误差、齿面扭曲和齿面相对扭曲现象得到明显改善,齿面整体法向修形误差值减小了48.15%,齿面扭曲减小了52.85%,齿面相对扭曲减小了54.98%,总体误差减小了52.81%。
实例验证表明,该补偿方法可有效减小齿向修形时的误差,特别是齿面扭曲和齿面相对扭曲。
一种成形磨削齿向修形误差补偿方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0