





专利摘要
一种可见光域双物距叠层成像方法,通过双物距相位复原算法,在物面和记录面同时添加约束条件,使得成像收敛速度远远高于传统叠层成像,对一系列具有一定重叠的衍射图样进行重建,可以得到高分辨率的物体的振幅和相位图像。在不同记录距离下,移动样品本身,使入射光波按照扫描路径照射到样品的不同部位,即由光阑控制光束的尺寸,设置三维平移台的移动步进,移动三维平移台,使得每一次照射样品的一部分时,都要和至少另一个照明部分发生重叠,即每一个衍射图样之间相互交叠,这样就建立起一种重构算法,对不同记录距离下的重建像进行约束,使得求解最后样品的整体复振幅信息的速度更快,成像分辨率更高,以至于可以实时成像。
权利要求
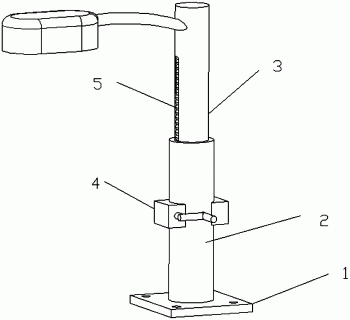
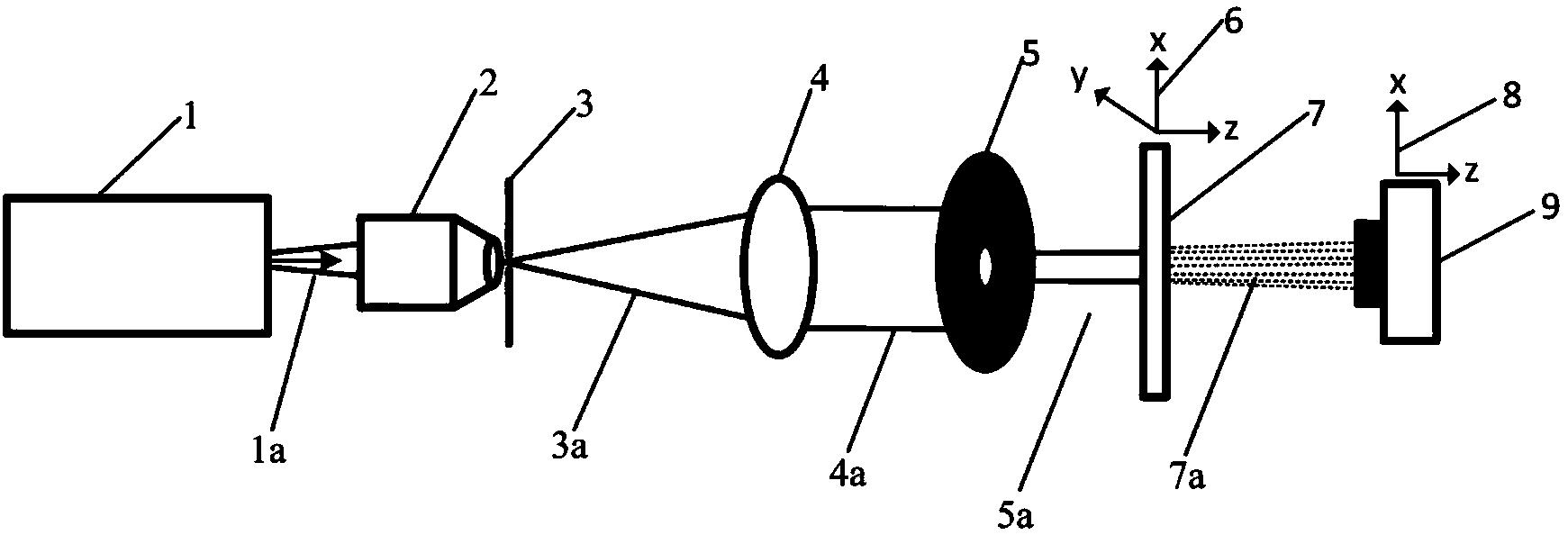
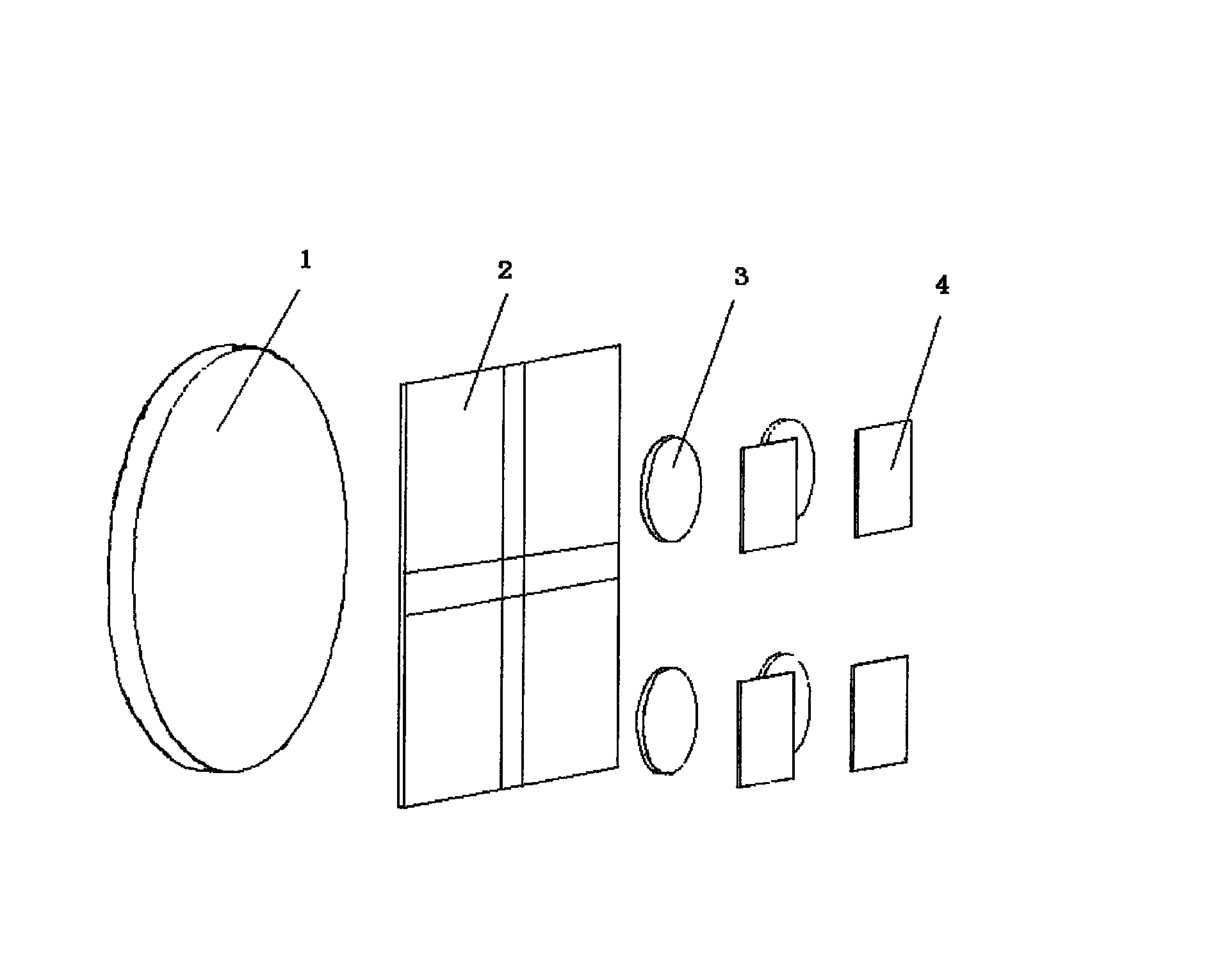
1.一种可见光域双物距叠层成像方法,其特征在于:实现该方法的系统光路包括可调谐半导体激光器(1)、显微物镜(2)、针孔(3)、凸透镜(4)、光阑(5)、三维平移台(6)、样品(7)、二维平移台(8)、CMOS图像传感器(9);
可调谐半导体激光器(1)用于输出中心波长为660nm的可见光波(1a);在显微物镜(2)与针孔(3)的作用下变为发散的球面波(3a),将针孔(3)置于凸透镜(4)的焦点处,球面光波经过凸透镜(4)就变为平行光(4a),这样就完成扩束准直,在凸透镜(4)的后面放置光阑(5),通过调节光阑(5)的小孔的直径,来调节平行光束(5a)的宽度,将这个平行光束(5a)入射到样品(7)上,样品(7)置于三维平移台(6)上,三维平移台(6)设置在光阑(5)之后;利用三维平移台(6)实现对样品(7)的位置调整,使得光束依次对样品(7)的每一位置进行横向扫描,同时相邻照明光斑之间有确定的交叠率,二维平移台(8)设置在三维平移台(6)之后,CMOS图像传感器(9)设置在二维平移台(8)上,通过样品(7)后的出射光波(7a)传播到CMOS图像传感器(9)上;分别采集到不同位置的样品衍射图样,然后移动二维平移台(8),改变样品(7)到CMOS图像传感器的距离,然后再次采集不同位置的样品(7)衍射图样;当记录距离为d1时,每一个位置记录一幅衍射图样,j表示采集的幅数,j=1,2,…,m,m为整数,用 表示采样的顺序,r'表示记录面I的空间坐标分布,Rj表示记录的衍射图的的顺序;横向扫描完样品的每一位置,纵向移动二维平移台(8),记录距离为d2时,再次横向扫描完样品的每一位置,每一个位置记录一幅衍射图样,用 表示采样的顺序,r”表示记录面II的空间坐标分布;
提高分辨率迭代方法包括九步步骤:
(1)通过探测器得到的整幅衍射图 尺寸为1024×1024像素,其中,di表示记录距离,i=1,2,Rj表示记录的衍射图的的顺序,共记录m幅衍射图,r'表示记录面I的空间坐标分布;
(2)从 在开始横向扫描重建,首先对样品和探针的复振幅值进行猜测,分别表示为On,j(r)和Pn,j(r),n表示迭代次数;探针的出射光波通过样品后为样品的复振幅值和探针复振幅值的乘积即ψn,j(r)=Pn,j(r-Rj)On,j(r);这里r和r'分别表示物面和记录面的空间坐标分布;
(3)将透过样品的光波ψn,j(r)经角谱传播d1,到探测器平面,得到记录面I的复振幅值为 即
其中,F和F-1分别表示傅里叶变换和逆傅里叶变换,d1为物面到记录面的传播距离,qx、qy为空间频率;ASP代表角谱算法;
(4)用探测器采集到的强度衍射图 的均方根代替第(3)步中 的振幅,得到新的复振幅分布
(5)采用角谱算法ASP将更新得到的记录面的复振幅回传到物面,得到新的物面的场分布ψ'n,j(r);通过两个更新函数更新初始猜测的物体和探针,样品的更新函数为:
这里,α为权重系数,取值为0.98;探针的更新函数:
这里,β为权重系数,取值为0.98;
(6)采用新的更新物函数和探针函数的乘积作为通过物体后出射光波的复振幅,扫描第j+1个位置,更新步骤(3)中的复振幅ψj+1,n(r),从步骤(3)至步骤(5)继续扫描,直至扫描完成第m个位置,即扫描完成整个物面,得到更新的物函数,进行步骤(7);
(7)添加物面的约束条件更新物函数,物面的约束条件为:
所以,
(8)将更新的函数On(r)重新作为物体的猜测函数,探针的更新函数采用步骤(5)得到的更新函数Pn(r),此时,透过样品的光波ψn,j(r),通过角谱传播d2,到记录面II上,得到记录面II的复振幅值为 即再次完成上述步骤(3)到步骤(7);特别注意上述步骤(3)到步骤(7)的传播距离这时已经由d1更新为d2;当再一次的更新完成之后,在将传播距离再次更新为d1,依次迭代;
(9)整体迭代10次后,更新得到高分辨率的整幅物体图像的吸收和相位分布。
说明书
技术领域
本发明涉及一种叠层成像方法,特别是涉及一种可见光域双物距叠层成像方法,是一种基于双物距依靠相位复原算法提高重建像的分辨率的相衬成像技术。
背景技术
叠层成像是一种不需要透镜的成像技术,通过交叠采集冗余的衍射图样信息,能够很好地恢复样品的复振幅信息。叠层成像具有非透镜成像技术(如全息)的共同优点,即对相位敏感(通过算法恢复复振幅),非接触成像且像质理论上可达到衍射极限。同时,相比于显微镜成像,叠层成像的视场范围更大,分辨率更高,克服了目前生物样品成像视场小的缺点。在X射线、可见光域、电子显微等领域都有重要应用。
本发明旨在提出一种可见光域双物距叠层成像方法,这是一项新型成像方法,实验装置简单,使用方便。其依靠无像差衍射同时无需镜头完成成像,成像样品尺寸不受探测器尺寸和光斑尺寸的影响,相比传统的焦平面成像技术其提供了更大的成像视场,成像分辨率不受探测器靶面尺寸的限制,同时,相比于传统叠层成像,通过添加约束条件可以使其分辨率可以得到很大的提高,收敛速度更快,抗噪声能力更强,可以实时成像。
发明内容
本发明采用的技术方案为一种双物距可见光域叠层提高分辨率的方法,实现该方法的系统光路包括可调谐半导体激光器1、显微物镜2、针孔3、凸透镜4、光阑5、三维平移台6、样品7、二维平移台8、CMOS图像传感器9。
可调谐半导体激光器1用于输出中心波长为660nm的可见光波1a;在显微物镜2与针孔3的作用下变为发散的球面波3a,将针孔3置于凸透镜4的焦距处,球面光波经过凸透镜4就变为平行光4a,这样就完成的扩束准直,在凸透镜4的后面放置光阑5,通过调节光阑5的小孔的直径,来调节光束5a的宽度,将这个平行光束5a入射到样品7上,样品7置于三维平移台6上,三维平移台6设置在调节光阑5之后;利用三维平移台6实现对样品7的位置调整,使得光束依次对样品7的每一位置进行横向扫描,同时相邻照明光斑之间有确定的交叠率,二维平移台8设置在三维平移台6之后,CMOS图像传感器9设置在二维平移台8上,通过样品7后的出射光波7a传播到CMOS图像传感器9上;分别采集到不同位置的样品衍射图样,然后移动二维平移台8,改变样品7到CMOS图像传感器的距离,然后再次采集不同位置的样品7衍射图样。当记录距离为d1时,每一个位置记录一幅衍射图样,j表示采集的幅数(j=1,2,···,m),m为整数,用 表示采样的顺序,r'记录面I的坐标分布,Rj表示记录的衍射图的的顺序;横向扫描完样品的每一位置,纵向移动二维平移台8,记录距离为d2时,再次横向扫描完样品的每一位置,每一个位置记录一副衍射图样,j表示采集幅数(j=1,2,···,m),用 表示采样的顺序,r”记录面II的坐标分布。
本发明提出的一种双物距可见光域叠层成像方法,其提高分辨率迭代方法包括九步步骤:
(1)通过探测器得到的整幅衍射图 尺寸为1024×1024像素,其中,di表示记录距离(i=1,2),Rj表示记录的衍射图的的顺序(j=1,2,···,m),共记录m幅衍射图,r'记录面I的坐标分布。
(2)从 在开始横向扫描重建,首先对样品和探针的复振幅值进行猜测,分别表示为On,j(r)和Pn,j(r),n表示迭代次数。探针的出射光波通过样品后为样品的复振幅值和探针复振幅值的乘积即ψn,j(r)=Pn(r-Rj)On,j(r)。这里r和r'分别表示物面和记录面的空间坐标分布。
(3)将透过样品的光波ψn,j(r)经角谱传播d1(Angularspectrumpropagation,ASP),到探测器平面,得到记录面I的复振幅值为 即
其中,F和F-1分别表示傅里叶变换和逆傅里叶变换,d1为物面到记录面的传播距离,qx、qy为空间频率。
(4)用探测器采集到的强度衍射图 的均方根代替第(3)步中 的振幅,得到新的复振幅分布
(5)采用角谱算法(ASP)将更新得到的记录面的复振幅回传到物面,得到新的物面的场分布ψ'n,j(r)。通过两个更新函数更新初始猜测的物体和探针,样品的更新函数为:
这里,α权重系数,取值一般在[0.9,1]之间,实验中取值为0.98。探针的更新函数:
这里,β权重系数,取值在[0.9,1]之间,实验中取值为0.98。
(6)采用新的更新物函数和探针函数的乘积作为通过物体后出射光波的复振幅,扫描第j+1个位置,更新步骤(3)中的复振幅ψj+1,n(r),从步骤(3)至步骤(6)继续扫描,直至扫描完成第m个位置,即扫描完成整个物面,得到更新的物函数,进行第(7)步。
(7)添加物面的约束条件更新物函数,物面的约束条件为:
所以,
(8)将更新的函数On(r)重新作为物体的猜测函数,探针的更新函数采用第(5)步得到的更新函数Pn(r),此时,透过样品的光波ψn,j(r),通过角谱传播d2,到记录面II上,得到记录面II的复振幅值为 即再次完成上述第(3)步到第(8)步。特别注意上述第(3)步到第(8)步的传播距离这时已经由d1更新为d2。当再一次的更新完成之后,在将传播距离再次更新为d1,依次迭代。
(9)整体迭代10次后,得到更新得到高分辨率的整副物体图像的吸收和相位分布。
有益效果
一种双物距可见光域叠层成像提高分辨率的方法,能够对大尺寸物体进行高分辨率实时成像。通过双物距相位复原算法,在物面和记录面同时添加约束条件,使得成像收敛速度远远高于传统叠层成像,对一系列具有一定重叠的衍射图样进行重建,可以得到高分辨率的物体的振幅和相位图像。
附图说明
图1是双物距可见光域叠层成像方法的系统光路。
图2是双物距可见光域叠层成像方法对采集到的一系列衍射图样进行重建的流程图。
1、可调谐半导体激光器,2、显微物镜,3、针孔,4、凸透镜,5、光阑,6、三维平移台,7、样品,8、二维平移台,9、CMOS图像传感器。
具体实施方式
下面参照附图详细说明本发明的典型实施例及其特征。
本发明的一种双物距可见光域空间扫描相干衍射相衬成像的方法,其特征在于在不同记录距离下,移动样品本身,使入射光波按照扫描路径照射到样品的不同部位,即由光阑5控制光束5a的尺寸,设置三维平移台6的移动步进,移动三维平移台,使得每一次照射样品的一部分时,都要和至少另一个照明部分发生重叠,即每一个衍射图样之间相互交叠,这样就建立起一种重构算法,对不同记录距离下的重建像进行约束,使得求解最后样品的整体复振幅信息的速度更快,成像分辨率更高,以至于可以实时成像。
其系统光路包括可调谐半导体激光器1、显微物镜2、针孔3、凸透镜4、光阑5、三维平移台6、样品7、二维平移台8、CMOS图像传感器9。实验中的可调谐半导体激光器,中心波长为660nm,显微物镜为40倍,针孔为10um,通过光阑5调节照射到样品上的光斑直径,在本发明中调节光斑直径为3.3mm,移动三维平移台6的步进为0.66mm,调节二维平移台8到样本7的距离,在不同记录距离下记录不同位置的衍射图样。CMOS图像传感器9的像素个数为1024×1024像素,像素尺寸为12μm×12μm,样品采用Edmund公司的USAF1951反射式分辨率板。
成像实验的样品选取为USAF1951反射式分辨率板,CMOS图像传感器探测得到的衍射图尺寸为1024×1024像素,每一次移动距离0.66mm,,相邻光束之间的交叠面积为约为80%,在记录为d1时,采集6x6个位置,然后移动三维平移台改变记录距离,在记录距离为d2时,采集相同6x6个位置的衍射图。对采集到的物体的36个位置的衍射图进行更新融合,使在记录距离d1下的衍射图样更新完,对第一次迭代得到的完整再现像进行约束,进行记录距离d2下的衍射图样更新,为一次完整的迭代循环。
(1)首先将在记录距离为d1时依次采集到的1024×1024像素衍射图样顺序标记为 将在记录距离为d2时依次采集到的1024×1024像素衍射图样顺序标记为 Rj表示记录的衍射图的的顺序(j=1,2,···,m)。
(2)从 在开始横向扫描重建,首先对物体和探针的复振幅值进行猜测,分别表示为On,j(r)和Pn,j(r)。探针的出射光波通过物体后为物体的复振幅值和探针复振幅值的乘积即ψn,j(r)=Pn(r-Rj)On,j(r)。这里r和r'分别表示物面和记录面的空间坐标分布,Rj表示扫描路径。
(3)将透过样品的光波ψn,j(r)经角谱传播d1(Angular spectrum propagation,ASP),到探测器平面,得到记录面I的复振幅值为 即
其中,F和F-1分别表示傅里叶变换和逆傅里叶变换,d1为物面到记录面的传播距离,qx和qy为空间频率。
(4)用探测器采集到的强度衍射图 的均方根代替第(3)步中 的振幅,得到新的复振幅分布
(5)采用角谱算法将更新得到的记录面的复振幅回传到物面,得到新的物面的场分布ψ'n,j(r)。通过两个更新函数更新初始猜测的物体和探针,物体的更新函数为:
这里,α为权重系数,取值一般在[0.9,1]之间,实验中取值为0.98。探针的更新函数:
这里,β权重系数,取值一般在[0.9,1]之间,实验中取值为0.98。
(6)采用新的更新物函数和探针函数的乘积作为通过物体后出射光波的复振幅,扫描第j+1个位置,更新步骤(3)中的复振幅ψj+1,n(r),从步骤(3)至步骤(6)继续扫描,直至扫描完成第m个位置,即扫描完成整个物面,得到更新的物函数,进行第(7)步。
(7)添加物面的约束条件更新物函数,物面的约束条件为:
所以,
(8)将更新的函数On(r)重新作为物体的猜测函数,探针的更新函数采用第(5)步得到的更新函数Pn(r),此时,透过样品的光波ψn,j(r),通过角谱传播d2,到记录面上,得到记录面II的复振幅值为 即再次完成上述第(3)步到第(8)步。特别注意上述第(3)步到第(8)步的传播距离这时已经由d1更新为d2。当再一次的更新完成之后,在将传播距离更新为d1,依次迭代。
(9)整体迭代10次后,得到更新得到高分辨率的整副物体图像的吸收和相位分布。
本发明的典型实施例的实验结果表明,通过该双物距可见光域叠层成像方法能有效扩大成像视场,提高系统的成像分辨率,提高了成像的收敛速度,可以实时成像,重建了反射式分辨率板的一系列衍射图,并通过对衍射图的相位重建,再现得到了反射式分辨率板的振幅和相位图像。
尽管参考特定实施例详细描述了本发明,在此描述的本发明实施例没有打算是详尽的或者局限于所公开的具体形式。相反,所选的用于说明问题的实施例是为了使本技术领域内的技术人员实施本发明而选择的。在不脱离下面的权利要求所描述和限定的本发明的实质范围的情况下,存在变型例和修改例。
一种可见光域双物距叠层成像方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0