







专利摘要
本发明属于传感测控技术领域,尤其是在航空航天中针对推力发生装置开展力学性能研究,多维复合喷管装置单元推力解算方法,具体为一种多维复合喷管装置在复合点火条件下进行单元力解算。首先,根据多维复合喷管装置所需要的运动方式,多维复合喷管装置上的喷管单元点火。点火后由测量装置检测出多维复合喷管装置上所受的合力与合力矩,然后结合上述方法,列出合力平衡方程与合力矩平衡方程,解算出参与点火的每一个喷管单元的推力,从而得到每一个喷管单元的推力输出性能曲线,实现对每一个喷管单元的标定与评估。
权利要求
1.一种多维复合喷管装置单元推力解算方法,其特征在于,步骤如下:
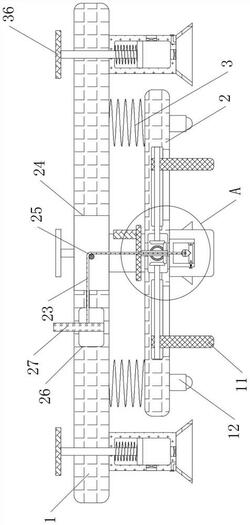
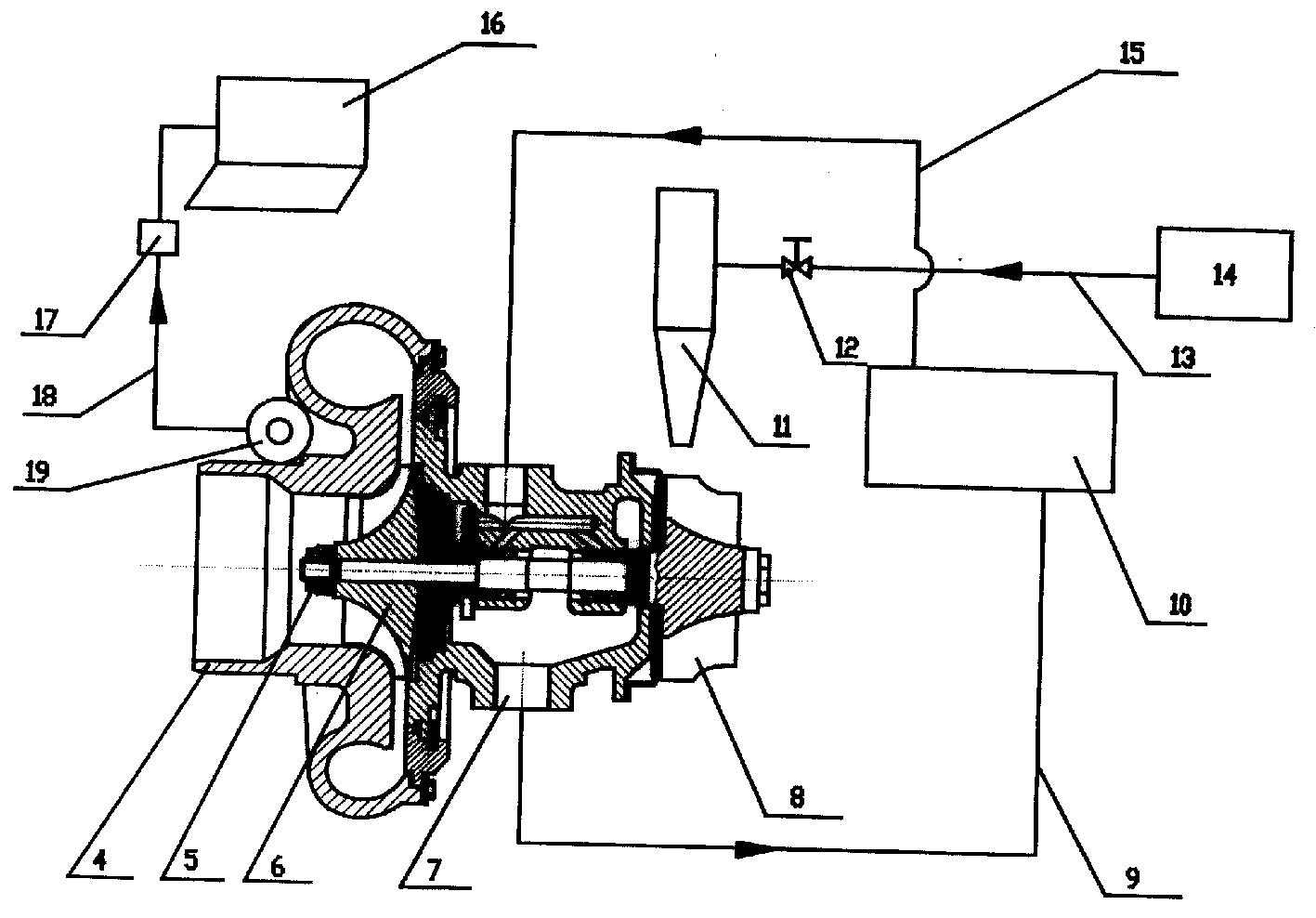
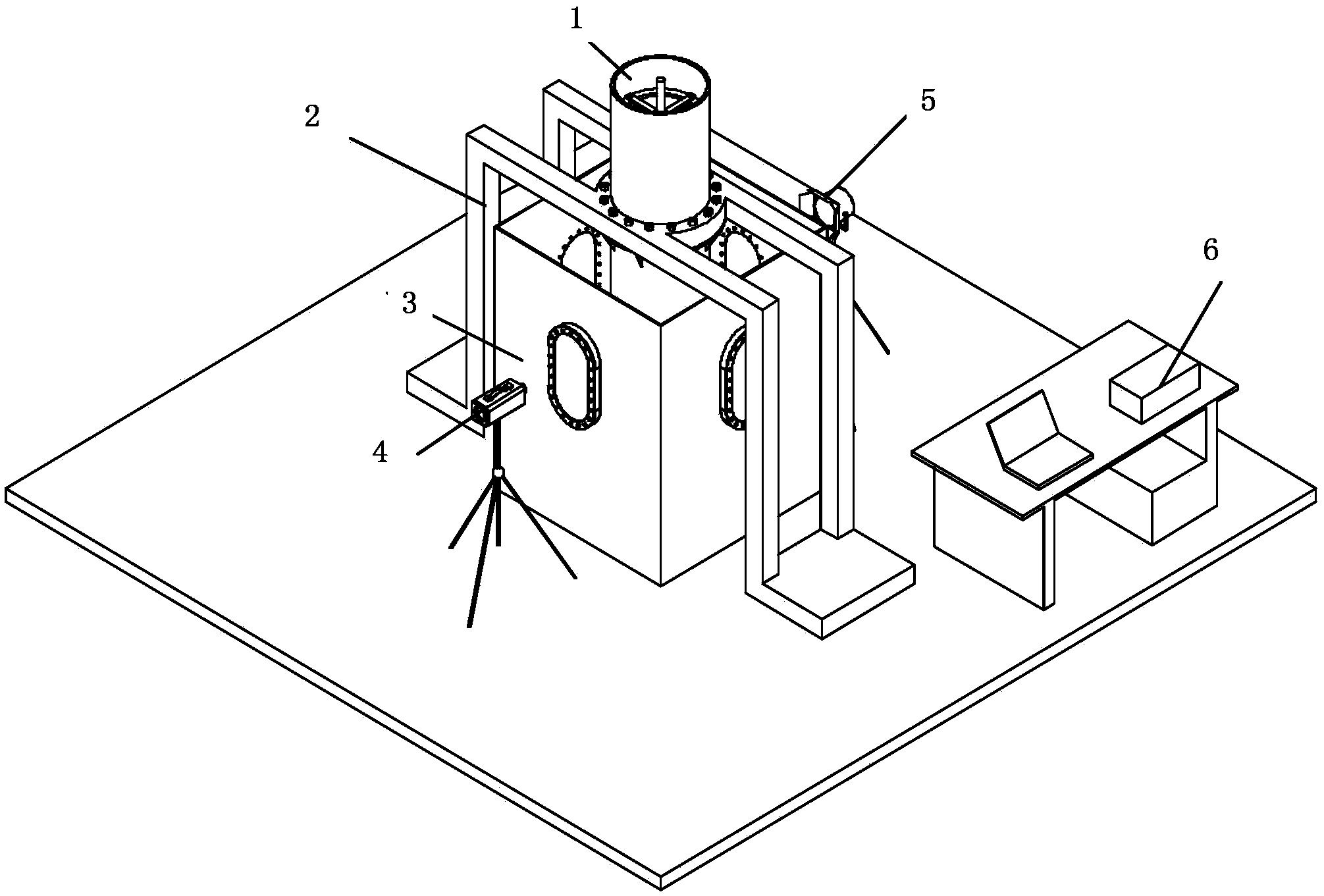
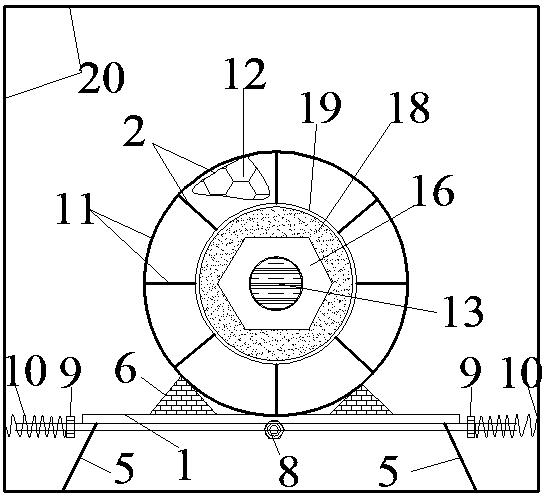
六维力测试平台:传感器(3)安装于底座(2)与上盖板(4)之间,通过双头螺柱(7)连接;圆柱销(13)通过底座(2)上的销孔(6),六维力测试平台在多维复合喷管装置测试台架(12)上完成定位,并通过螺钉(11)穿过底座(2)上的螺纹孔(1)实现固定;六维力测试平台的上盖板(4)通过圆锥销(14)穿过销孔(8),实现与转接法兰(10)的定位,并通过连接螺栓实现固定;设六维力测试平台中心为原点O,底座(2)所在的平面为x、z轴方向,垂直于底座(2)的方向为y轴方向;多维复合喷管装置定位安装在转接法兰(10)上,确保多维复合喷管装置的中轴线与原点O重合;
喷管点火时,多维复合喷管装置产生2个方向的力和3个方向的力矩;
滚转力矩:
其中:m为2、5卦限点火喷管的个数;n为第1、6卦限点火喷管的个数;h为多维复合喷管装置参与点火的喷管层数;Fxi为第2、5卦限参与点火喷管产生的推力在x向的分力;Fxj为第1、6卦限参与点火喷管产生的推力在x向的分力;Fzt为第1、6卦限参与点火喷管产生的推力在z向的分力;Fzw为第2、5卦限参与点火喷管产生的推力在z向的分力;lk为参与点火喷管中心线与y轴之间距离;
偏航力矩:
其中:h为多维复合喷管装置参与点火的喷管层数;p为1、2卦限点火喷管个数;q为5、6卦限点火喷管个数;Fza为1、2卦限点火喷管产生的推力在z向的分力;Fzb为5、6卦限点火喷管产生的推力在z向的推力;ak为参与点火喷管中心线与多维喷管复合装置中心的距离;
俯仰力矩:
其中:h为多维复合喷管装置参与点火的喷管层数;r为1、5卦限参与点火喷管个数;s为2、6卦限参与点火喷管个数;Fxc为第1、5卦限参与点火喷管产生的推力在x方向的分力;Fxd为第2、6卦限参与点火喷管产生的推力在x方向的推力;ak为参与点火喷管的中心线与多维喷管复合装置中心的距离;
升力:
其中:r为1、5卦限参与点火的喷管个数;s为2、6卦限参与点火的喷管个数;Fxc为1、5卦限参与点火喷管产生的推力在x向的分力;Fxd为2、6卦限参与点火喷管产生的推力在x向的分力;
侧向力:
其中:p为1、2卦限参与点火的喷管个数;q为5、6卦限参与点火的喷管个数;Fza为1、2卦限参与点火喷管产生的推力在z向的分力;Fzb为5、6卦限参与点火喷管产生的推力在z向的分力;
喷管点火时,由测力装置测得的滚转力矩为:
其中:Fx1、Fx2、Fx3、Fx4为1、2、3、4号传感器测得的x向分力;Fz1、Fz2、Fz3、Fz4为1、2、3、4号传感器测得的z向分力;d传感器与坐标轴之间距离;
测力装置测得的偏航力矩为:
其中:Fy1、Fy2、Fy3、Fy4为1、2、3、4号传感器测得的y向分力;b为传感器与多维喷管复合装置中心之间距离;
测力装置测得的俯仰力矩为:
其中:Fy1、Fy2、Fy3、Fy4为1、2、3、4号传感器测得的y向分力;b为传感器与多维喷管复合装置中心之间距离;
测力装置测得的升力为:
其中:Fxi为传感器测得的x向分力;
测力装置测得的侧向力为:
其中:Fzi为传感器测得的z向分力;
由公式(1)~(10),解算出当喷管点火时多维复合喷管装置所产生的力和力矩,同时也解算出参与点火的单个喷管单元所产生的推力,得到每个喷管的推力输出性能曲线。
2.根据权利要求1所述的多维复合喷管装置单元推力解算方法,其特征在于,任意层喷管单元工作层产生正滚转力矩
正滚转力矩:
升力:
俯仰力矩:
六维力测试平台测得的正滚转力矩:
六维力测试平台测得的升力:
六维力测试平台测得的俯仰力矩:
联立方程(11)~(16),解算出第二喷管(16)的推力:
第五喷管(19)的推力:
3.根据权利要求2所述的多维复合喷管装置单元推力解算方法,其特征在于,任意层喷管单元工作层产生负滚转力矩
负滚转力矩:
升力:
俯仰力矩:
六维力测试平台测得的负滚转力矩:
六维力测试平台测得的升力:
六维力侧力平台测得的俯仰力矩:
联立方程(17)~(22),解算出第一喷管(15)的推力:
第四喷管(18)的推力:
4.根据权利要求3所述的多维复合喷管装置单元推力解算方法,其特征在于,任意层喷管工作层产生正升力
滚转力矩:
俯仰力矩:
正升力:
六维力测试平台测得的滚转力矩:
六维力测力平台测得的俯仰力矩:
六维力测试平台测得的正升力:
同理,联立方程(23)~(28)解算出第一喷管(15)的推力:
第二喷管(16)的推力:
5.根据权利要求4所述的多维复合喷管装置单元推力解算方法,其特征在于,任意层喷管工作层产生负升力
滚转力矩:
俯仰力矩:
负升力:
六维力测试平台测得的滚转力矩:
六维力测力平台测得的俯仰力矩:
六维力测试平台测得的负升力:
联立方程(29)~(34),解算出第四喷管(18)的推力:
第五喷管(19)的推力:
6.根据权利要求5所述的多维复合喷管装置单元推力解算方法,其特征在于,任意层喷管工作层产生正滚转力矩和正升力
正滚转力矩:
俯仰力矩:
正升力:
六维力测试平台测得的滚转力矩:
六维力测试平台测得的俯仰力矩:
六维力测试平台测得的升力:
同理,联立方程(35)~(40),解算出第一喷管(15)的推力:
第二喷管(16)的推力:
第五喷管(19)的推力:
7.根据权利要求6所述的多维复合喷管装置单元推力解算方法,其特征在于,任意层喷管工作层产生负滚转力矩和负升力
负滚转力矩:
负升力:
俯仰力矩:
六维力测试平台测得的负滚转力矩:
六维力测试平台测得的负升力:
六维力测试平台测得的俯仰力矩:
同理,联立方程(41)~(46),解算出第一喷管(15)的推力:
第四喷管(18)的推力:
第五喷管(19)的推力:
8.根据权利要求7所述的多维复合喷管装置单元推力解算方法,其特征在于,6台喷管工作层产生正滚转力矩、正升力和正侧向力
正滚转力矩:
俯仰力矩:
偏航力矩:
升力:
正侧向力:
六维力测试平台测得的滚转力矩:
六维力测试平台测得的俯仰力矩:
六维力测试平台测得的偏航力矩:
六维力测试平台测得的升力:
六维力测试平台测得的正侧向力:
多维复合喷管装置单元推力解算方法专利购买费用说明
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
![]()











动态评分
0.0