











专利摘要
本发明公开了一种发射式海洋悬浮物柔性打捞机器人。包括自主潜行器和抛网部件;所述自主潜行器包括筒形外壳、推进器、发射器、气囊和连接绳索;筒形外壳外周面安装有三对推进器,由推进器推动筒形外壳在水下移动实现机器人的自主机动;气囊安装于筒形外壳尾部,气囊内装有炸药,发射器安装在筒形外壳的头部,发射器连接安装抛网部件,连接绳索一端与筒形外壳前端中部连接,另一端与连接于抛网部件的立体抛网的中部。本发明的柔性打捞机器人具有机动能力强、容错性好及打捞效率高等优点。
权利要求
1.一种发射式海洋悬浮物柔性打捞机器人,其特征在于:包括自主潜行器(1)和抛网部件(2);所述自主潜行器(1)包括筒形外壳(1.1)、推进器(1.2)、发射器(1.3)、气囊(1.4)和连接绳索(1.5);筒形外壳(1.1)外周面安装有三对推进器(1.2),由推进器(1.2)推动筒形外壳(1.1)在水下移动实现机器人的自主机动;气囊(1.4)安装于筒形外壳(1.1)尾部,气囊(1.4)内装有炸药,发射器(1.3)安装在筒形外壳(1.1)的头部,发射器(1.3)连接安装抛网部件(2),连接绳索(1.5)一端与筒形外壳(1.1)前端中部连接,另一端与连接于抛网部件(2)的立体抛网(2.27)的中部。
2.根据权利要求1所述的发射式海洋悬浮物柔性打捞机器人,其特征在于:
所述的气囊(1.4)是压缩式气囊。
3.根据权利要求1所述的发射式海洋悬浮物柔性打捞机器人,其特征在于:
所述的抛网部件(2)包括四个球形块、立体抛网(2.1)和收网绳索(2.2);
所述球形块包括包括两个相互垂直安装的绳索控制机构和球形外壳(2.1)、L形支撑板(2.2);球形外壳(2.1)内固定安装有L形支撑板(2.2),L形支撑板(2.2)的两侧边上分别安装有一个绳索控制机构,两个绳索控制机构相垂直安装,球形外壳(2.1)底部固定连接有发射塞(2.18);
所述绳索控制机构包括底横板(2.15)、绳索卷取部件、张力调节部件和走绳部件,底横板(2.15)固定在球形外壳(2.1)底部的L形支撑板(2.2)上,绳索卷取部件和走绳部件分别安装在底横板(2.15)内侧部和外侧部之上,张力调节部件安装在底横板(2.15)中部之上,并位于绳索卷取部件和走绳部件之间;
所述的绳索卷取部件包括测速编码器(2.3)、电机刹车(2.4)、卷绳电机(2.5)、变速器(2.6)、第一安装耳朵(2.7)、卷绳筒(2.8)和第二安装耳朵(2.9),第一安装耳朵(2.7)与第二安装耳朵(2.9)底部均安装在底横板(2.15)的上表面内侧部且相对布置,测速编码器(2.3)、电机刹车(2.4)、卷绳电机(2.5)与变速器(2.6)依次同轴连接,变速器(2.6)通过端面法兰固定安装在第一安装耳朵(2.7)上,变速器(2.6)的输出轴活动穿过第一安装耳朵(2.7)与卷绳筒(2.8)一端同轴固连,卷绳筒(2.8)另一端转动支撑安装于第二安装耳朵(2.9),卷绳筒(2.8)连接收网绳索(2.26);
所述的走绳部件包括张紧轮(2.12)、走绳板(2.13)、张力滑轮(2.14)、底横板(2.15)、绳长滑轮(2.16)和辅助滑轮(2.17),底横板(2.15)的外侧部上安装有竖直的走绳板(2.13),走绳板(2.13)从靠近绳索卷取部件向外侧依次安装有辅助滑轮(2.17)、带有张力传感器(2.10)的张力滑轮(2.14)、带有绳长传感器(2.11)的绳长滑轮(2.16)和张紧轮(2.12);
所述的张力调节部件包括张力电机(2.19)、第一轴承支座(2.20)、丁字齿轮筒(2.22)、电机齿轮(2.23)和第二轴承支座(2.25),第一轴承支座(2.20)与第二轴承支座(2.25)固定在底横板(2.15)的中部上且相对布置,张力电机(2.19)固定安装在第一轴承支座(2.23)底部,张力电机(2.19)的输出轴穿过第一轴承支座(2.20)后与电机齿轮(2.23)同轴固连,丁字齿轮筒(2.22)主要是由齿轮盘和绕线轴同轴连接构成,丁字齿轮筒(2.22)两端分别经第一轴承(2.21)、第二轴承(2.24)活动套装于第一轴承支座(2.20)、第二轴承支座(2.25)顶部的内孔中,丁字齿轮筒(2.22)的齿轮盘与电机齿轮(2.23)相互啮合形成齿轮副;
收网绳索(2.26)的两端分别伸入到两个球形外壳(2.1)内和其中的一个绳索控制机构连接,具体是:收网绳索(2.26)的端部从球形外壳(2.1)上的通孔进入球形外壳(2.1)内部后,以S形绕线方式依次绕经张紧轮(2.12)、绳长滑轮(2.16)、张力滑轮(2.14)和辅助导轮(2.17)后,然后穿过丁字筒(2.22)齿轮盘上的通孔,再经缠绕于丁字筒(2.22)绕线轴多圈圈数后,最后穿过第二轴承支座(2.25)的孔固连在卷绳筒(2.8)的内壁上;四个球形块在矩形的四角,在矩形四边的相邻两个球形块之间均连接有一条收网绳索(2.26),共计形成四条收网绳索(2.26),立体抛网(2.1)的四边分别连系于四条收网绳索(2.26)。
4.根据权利要求1所述的发射式海洋悬浮物柔性打捞机器人,其特征在于:
所述的立体抛网(2.27)为呈喇叭状结构的立体三维网,喇叭状结构的小端封闭且经连接绳索(1.5)连接到自主潜行器(1)的中部,喇叭状结构的大端作为网口,网口边缘与收网绳索(2.26)相连接;球形块内部的绳索控制机构控制收网绳索(2.26)的收放带动球形块的靠拢和分离,进而实现立体抛网(2.17)网口的开合。
5.根据权利要求1所述的发射式海洋悬浮物柔性打捞机器人,其特征在于:
所述的发射器(1.3)包括四个发射端口,每个发射端口内套装有一个发射塞(2.18),四个发射塞(2.18)分别固定连接于抛网部件(2)的四个球形块的球形外壳(2.1)外壁。
说明书
技术领域
本发明涉及了一种打捞机器人,尤其涉及了一种发射式海洋悬浮物柔性打捞机器人。
背景技术
一方面,随着人类活动的增加,海洋中积累的垃圾也越来越多,特别是一些不易分解的垃圾,长期悬浮在海洋中,对海水水质和海洋生态系统造成恶劣的影响;另一方面,与陆运及空运相比,海运具有通过性强,运价低一级适应能力强等优点,海上运输已经成为国际贸易中最主要的运输方式,随着海运的增多,货船出现事故的情况也越来越多,许多货物掉落在海洋中,长期在海底或悬浮在海洋之中。因此,研制海洋打捞机器人对海洋悬浮物打捞具有广阔的应用前景。目前,海洋打捞机器人一般采用机械臂之类的刚性执行构件,存在着打捞难度大、效率低及可靠性差等问题,可考虑设计以网或布为捕获执行构件的新型柔性打捞机器人解决上述问题。
发明内容
以海洋悬浮物打捞为背景,针对刚性打捞机器人存在的打捞难度大、效率低及可靠性差等问题,本发明的目的在于提供一种基于抛网式的柔性捕获机器人,具有机动能力强、打捞容错性好及打捞效率高等优点。
为了达到上述发明目的,本发明采用的技术方案是:
本发明包括自主潜行器和抛网部件;所述自主潜行器包括筒形外壳、推进器、发射器、气囊和连接绳索;筒形外壳外周面安装有三对推进器,由推进器推动筒形外壳在水下移动实现机器人的自主机动;气囊安装于筒形外壳尾部,气囊内装有炸药,发射器安装在筒形外壳的头部,发射器连接安装抛网部件,连接绳索一端与筒形外壳前端中部连接,另一端与连接于抛网部件的立体抛网的中部。
所述的气囊是压缩式气囊。
所述的抛网部件包括四个球形块、立体抛网和收网绳索。
所述球形块包括包括两个相互垂直安装的绳索控制机构和球形外壳、L形支撑板;球形外壳内固定安装有L形支撑板,L形支撑板的两侧边上分别安装有一个绳索控制机构,两个绳索控制机构相垂直安装,球形外壳底部固定连接有发射塞;
所述绳索控制机构包括底横板、绳索卷取部件、张力调节部件和走绳部件,底横板固定在球形外壳底部的L形支撑板上,绳索卷取部件和走绳部件分别安装在底横板内侧部和外侧部之上,张力调节部件安装在底横板中部之上,并位于绳索卷取部件和走绳部件之间。
所述的绳索卷取部件包括测速编码器、电机刹车、卷绳电机、变速器、第一安装耳朵、卷绳筒和第二安装耳朵,第一安装耳朵与第二安装耳朵底部均安装在底横板的上表面内侧部且相对布置,测速编码器、电机刹车、卷绳电机与变速器依次同轴连接,变速器通过端面法兰固定安装在第一安装耳朵上,变速器的输出轴活动穿过第一安装耳朵与卷绳筒一端同轴固连,卷绳筒另一端转动支撑安装于第二安装耳朵,卷绳筒连接收网绳索;所述的走绳部件包括张紧轮、走绳板、张力滑轮、底横板、绳长滑轮和辅助滑轮,底横板的外侧部上安装有竖直的走绳板,走绳板从靠近绳索卷取部件向外侧依次安装有辅助滑轮、带有张力传感器的张力滑轮、带有绳长传感器的绳长滑轮和张紧轮;所述的张力调节部件包括张力电机、第一轴承支座、丁字齿轮筒、电机齿轮和第二轴承支座,第一轴承支座与第二轴承支座固定在底横板的中部上且相对布置,张力电机固定安装在第一轴承支座底部,张力电机的输出轴穿过第一轴承支座后与电机齿轮同轴固连,丁字齿轮筒主要是由齿轮盘和绕线轴同轴连接构成,丁字齿轮筒两端分别经第一轴承、第二轴承活动套装于第一轴承支座、第二轴承支座顶部的内孔中,丁字齿轮筒的齿轮盘与电机齿轮相互啮合形成齿轮副。
收网绳索的两端分别伸入到两个球形外壳内和其中的一个绳索控制机构连接,具体是:收网绳索的端部从球形外壳上的通孔进入球形外壳内部后,以S形绕线方式依次绕经张紧轮、绳长滑轮、张力滑轮和辅助导轮后,然后穿过丁字筒齿轮盘上的通孔,再经缠绕于丁字筒绕线轴多圈圈数后,最后穿过第二轴承支座的孔固连在卷绳筒的内壁上;四个球形块在矩形的四角,在矩形四边的相邻两个球形块之间均连接有一条收网绳索,共计形成四条收网绳索,立体抛网的四边分别连系于四条收网绳索。
所述的立体抛网为呈喇叭状结构的立体三维网,喇叭状结构的小端封闭且经连接绳索连接到自主潜行器的中部,喇叭状结构的大端作为网口,网口边缘与收网绳索相连接;球形块内部的绳索控制机构控制收网绳索的收放带动球形块的靠拢和分离,进而实现立体抛网网口的开合。
所述的发射器包括四个发射端口,每个发射端口内套装有一个发射塞,四个发射塞分别固定连接于抛网部件的四个球形块的球形外壳外壁。
本发明在自主潜行器头部安装有发射器,实现抛网部件的发射;自主潜行器尾部安装有气囊,通过控制气囊中的炸药可实现气囊的充气膨胀与展开,实现打捞悬浮物的上浮;自主潜行器安装有三对相互垂直的推进器,实现机器人的自主机动。抛网部件包括四个球形块、立体抛网和收网绳索,球形块利用发射时的动能实现抛网展开,球形块内部安装有一对相互垂直的绳索控制机构,通过收网绳的收放立体抛网的收口。
本发明具有的有益效果是:
1、本发明相比于以往刚性打捞机器人具有容错性好及抓捕效率高等优点。
2、本发明通过四个自主球形潜航器的自主机动实现抛网的展开与收拢,可提高打捞可靠性、降低控制的复杂性。
3、本发明中每段收网绳的两端分别连接在两个绳索收放控制模块上,工作过程中即使有一个绳索收放控制模块故障,仍然可以实现网口收拢,提高了可靠性。
4、本发明中系绳绳长和张力由卷绳部件和张力调节部件分别控制,可在控制绳长的同时控制绳索张力。
5、本发明结合气囊技术,省去了以往海洋打捞机器人与母船直接的脐带绳索,没有脐带绳索缠绕的风险,提高了打捞机器人的稳定性。
附图说明
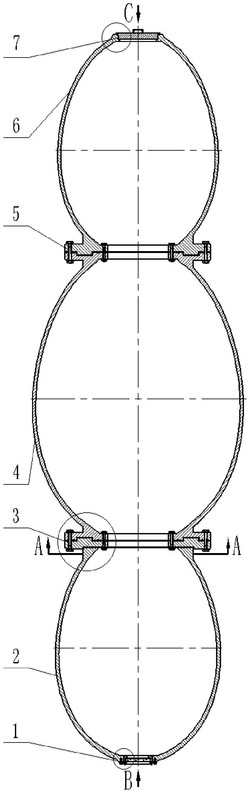
图1是本发明的局部剖视图。
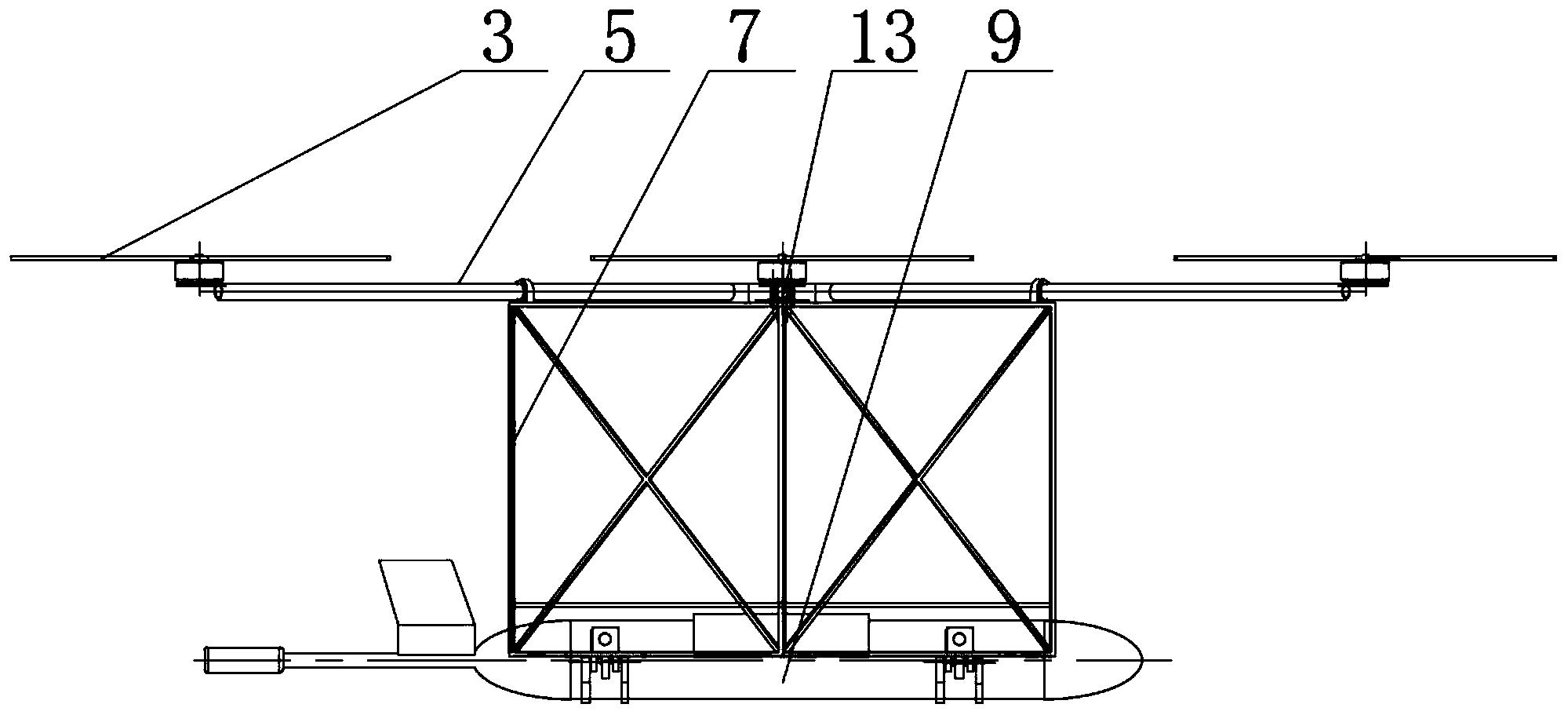
图2是本发明的自主潜行器三维图。
图3是本发明的绳索收放控制模块平面图。
图4是本发明的打捞机器人打捞前的示意图。
图5是本发明的打捞机器人打捞时的示意图。
图6是本发明的打捞机器人打捞网口收拢后的示意图。
图7是本发明的打捞机器人打捞后拖曳上浮示意图。
图中:1、自主潜行器,2、抛网部件,1.1、筒形外壳,1.2、推进器,1.3、发射器,1.4、气囊,1.5、连接绳索,2.1、球形外壳,2.2、L形支撑板,2.3、测速编码器,2.4、电机刹车,2.5、卷绳电机,2.6、变速器,2.7、第一安装耳朵,2.8、卷绳筒,2.9、第二安装耳朵,2.10、张力传感器,2.11、绳长传感器,2.12、张紧器,2.13、走绳板,2.14、张力滑轮,2.15、底横板,2.16、绳长滑轮,2.17、辅助滑轮,2.18、发射塞,2.19、张力电机,2.20、第一轴承支座,2.21、第一轴承,2.22、丁字齿轮筒,2.23、电机齿轮,2.24、第二轴承,2.25、第二轴承支座,2.26、收网绳索,2.27、立体抛网。
具体实施方式
下面结合附图和实施例对本发明作进一步说明。
具体实施的机器人包括自主潜行器1和抛网部件2。
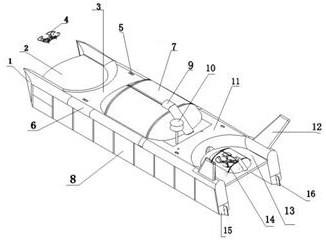
如图3和图4所示,自主潜行器1包括筒形外壳1.1、推进器1.2、发射器1.3、气囊1.4和连接绳索1.5;筒形外壳1.1外周面安装有三对推进器1.2,三对推进器1.2沿圆周间隔均布布置,由推进器1.2推动筒形外壳1.1在水下移动实现机器人的自主机动;如图5所示,气囊1.4安装于筒形外壳1.1尾部,气囊1.4是压缩式气囊。气囊1.4内装有炸药,通过气囊1.4中的炸药实现气囊1.4的充气膨胀,实现打捞悬浮物的上浮;发射器1.3安装在筒形外壳1.1的头部,发射器1.3连接安装抛网部件2,由发射器1.3实现抛网部件2的发射;如图7所示,连接绳索1.5一端与筒形外壳1.1前端中部连接,另一端与连接于抛网部件2的立体抛网2.27的中部;
如图1和图2所示,抛网部件2包括四个球形块、立体抛网2.1和收网绳索2.2。
球形块包括包括两个相互垂直安装的绳索控制机构和球形外壳2.1、L形支撑板2.2和发射塞2.18;球形外壳2.1内固定安装有L形支撑板2.2,L形支撑板2.2的两侧边上分别安装有一个绳索控制机构,两个绳索控制机构相垂直安装,球形外壳2.1底部固定连接有发射塞2.18。
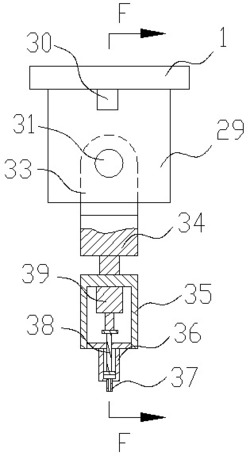
绳索控制机构包括底横板2.15、绳索卷取部件、张力调节部件和走绳部件,底横板2.15固定在球形外壳2.1底部的L形支撑板2.2上,绳索卷取部件和走绳部件分别安装在底横板2.15内侧部和外侧部之上,张力调节部件安装在底横板2.15中部之上,并位于绳索卷取部件和走绳部件之间;底横板2.15内侧为靠近L形支撑板2.2中部的一侧,底横板2.15外侧为远离L形支撑板2.2中部的一侧。
绳索卷取部件包括测速编码器2.3、电机刹车2.4、卷绳电机2.5、变速器2.6、第一安装耳朵2.7、卷绳筒2.8和第二安装耳朵2.9,第一安装耳朵2.7与第二安装耳朵2.9底部均安装在底横板2.15的上表面内侧部且相对布置,测速编码器2.3、电机刹车2.4、卷绳电机2.5与变速器2.6依次同轴连接,由电机刹车2.4带动卷绳电机2.5作停止运动,测速编码器2.3检测卷绳电机2.5的工作转速和状态,变速器2.6通过端面法兰固定安装在第一安装耳朵2.7上,变速器2.6的输出轴活动穿过第一安装耳朵2.7与卷绳筒2.8一端同轴固连,卷绳筒2.8另一端转动支撑安装于第二安装耳朵2.9的轴承内圈,卷绳筒2.8连接收网绳索2.26。
走绳部件包括张紧轮2.12、走绳板2.13、张力滑轮2.14、底横板2.15、绳长滑轮2.16和辅助滑轮2.17,底横板2.15的外侧部上安装有竖直的走绳板2.13,走绳板2.13从靠近绳索卷取部件向外侧依次安装有辅助滑轮2.17、带有张力传感器2.10的张力滑轮2.14、带有绳长传感器2.11的绳长滑轮2.16和张紧轮2.12。
张力调节部件包括张力电机2.19、第一轴承支座2.20、丁字齿轮筒2.22、电机齿轮2.23和第二轴承支座2.25,第一轴承支座2.20与第二轴承支座2.25固定在底横板2.15的中部上且相对布置,张力电机2.19固定安装在第一轴承支座2.23底部,张力电机2.19的输出轴穿过第一轴承支座2.20后与电机齿轮2.23同轴固连,丁字齿轮筒2.22主要是由齿轮盘和绕线轴同轴连接构成,丁字齿轮筒2.22两端分别经第一轴承2.21、第二轴承2.24活动套装于第一轴承支座2.20、第二轴承支座2.25顶部的内孔中,丁字齿轮筒2.22的齿轮盘与电机齿轮2.23相互啮合形成齿轮副。
具体地,第一轴承支座2.20内部安装有第一轴承2.21,第一轴承2.21的内圈与丁字齿轮筒2.22的左侧轴过盈配合,丁字齿轮筒2.22右侧轴与第二轴承2.24的内圈过盈配合,第二轴承2.24固定安装在第二轴承支座2.25内部。
收网绳索2.26的两端分别伸入到两个球形外壳2.1内和其中的一个绳索控制机构连接,具体是:收网绳索2.26的端部从球形外壳2.1上的通孔进入球形外壳2.1内部后,以S形绕线方式依次绕经张紧轮2.12、绳长滑轮2.16、张力滑轮2.14和辅助导轮2.17后,然后穿过丁字筒2.22齿轮盘上的通孔,再经缠绕于丁字筒2.22绕线轴多圈圈数后,最后穿过第二轴承支座2.25的孔固连在卷绳筒2.8的内壁上;收网绳索2.26与相邻球形块中的绳索控制机构均以相同形式连接。四个球形块在矩形的四角,在矩形四边的相邻两个球形块之间均连接有一条收网绳索2.26,共计形成四条收网绳索2.26,立体抛网2.1的四边分别连系于四条收网绳索2.26,即收网绳索2.2围合立体抛网2.1的四边带动立体抛网2.1的收拢和张开。
绳索卷绕部件的卷绳电机2.5工作带动卷绳筒2.8旋转,进而带动卷绳筒2.8所固定系有的收网绳索2.26卷绕收拢或者释放。走绳部件的四个轮引导收网绳索2.26并辅助张紧收网绳索2.26,张力传感器2.10和绳长传感器2.11分别测量收网绳索2.26的张力和卷绕收拢或者释放的位置。张力调节部件的张力电机2.19工作,经齿轮副带动丁字齿轮筒2.22旋转控制自身齿轮盘上的通孔的周向位置,由于收网绳索2.26穿过丁字筒2.22齿轮盘上的通孔,进而带动调节收网绳索2.26经过的通孔处和卷绳筒2.8之间的相对位置,调整收网绳索2.26的张紧程度实现张力调节。
由此,通过绳索卷绕部件可以实现绳索的收放控制,通过张力调节部件控制绳索缠绕在丁字筒上的圈数实现绳索张力控制,走绳部件实现绳索长度与张力的测量与绳索导引功能。
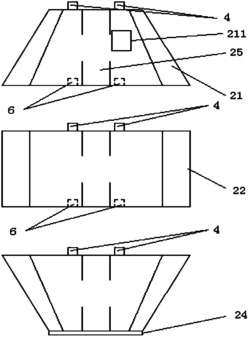
如图7所示,立体抛网2.27为呈喇叭状结构的立体三维网,喇叭状结构的小端封闭且经连接绳索1.5连接到自主潜行器1的中部,喇叭状结构的大端作为网口,网口边缘与收网绳索2.26相连接;球形块内部的绳索控制机构控制收网绳索2.26的收放带动球形块的靠拢和分离,进而实现立体抛网2.17网口的开合。
如图4所示,发射器1.3包括四个发射端口,四个发射端口沿圆周间隔均布,每个发射端口内套装有一个发射塞2.18,四个发射塞2.18分别固定连接于抛网部件2的四个球形块的球形外壳2.1外壁。
本发明的实施工作过程是:
捕获前,如图3所示,四个球形球形块通过球形壳2.1下部的发射塞2.18安装在发射器1.3的发射筒上,立体抛网2.27处于压缩折叠状态,存储于四个球形块围成的空间中部,立体通过自主潜行器1上的推进器1.2实现打捞机器人与悬浮物的接近。
捕获时,如图5所示,自主潜行器1通过发射器1.3将抛网部件2整体抛出,四个球形块以一定角度被发射出去,带动立体抛网2.27逐渐展开到最大状态,如图6所示,将水下悬浮物完全包裹后,四个球形块内部的绳索控制机构动作,进行收绳动作,从而实现立体抛网2.27网口的收拢,网口完全收拢后,电机刹车2.4动作锁死卷绳筒2.8,锁死立体抛网2.27网口。
捕获后,如图7所示,通过筒形外壳1.1内部的引爆器引爆气囊1.4中的炸药,气囊1.4瞬间充气膨胀到最大,将机器人升浮拖至水面上。
一种发射式海洋悬浮物柔性打捞机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0