







专利摘要
本发明公开了一种利用摆式陀螺仪测量地球自转角速度的方法,具体包括以下步骤:步骤一,将摆式陀螺仪安置于某测站点;步骤二,测量摆式陀螺仪的摆动周期;步骤三,测量测站点的地理纬度;步骤四,外部计算机根据得到的摆式陀螺仪的摆动周期和测站点的地理纬度,计算地球自转角速度ωe。本发明的方法简单易行,不需要大范围的地空联测,可以独立进行地球自转角速度的测量,且后期数据处理速度较快,可实时监测地球自转角速度的变化。
权利要求
1.一种利用摆式陀螺仪测量地球自转角速度的方法,其特征在于,具体包括以下步骤:
步骤一,将摆式陀螺仪安置于某测站点;
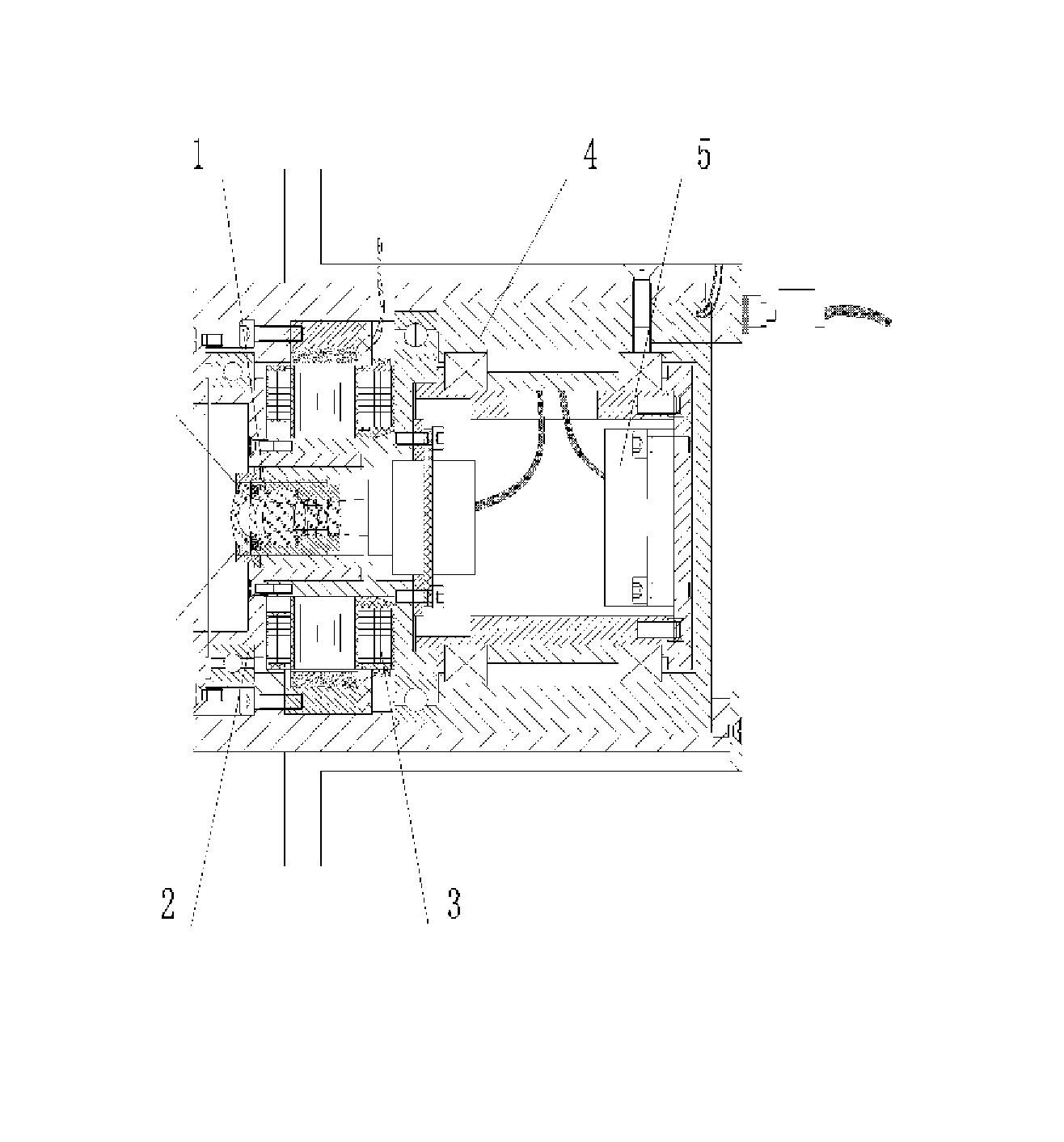
摆式陀螺仪包括外部壳体(2)、悬挂带(3)、陀螺马达房(4)、陀螺马达(5)、陀螺旋转轴(14);所述悬挂带(3)的上端与外部壳体(2)内部正上方中心相连,悬挂带(3)的下端与所述陀螺马达房(4)相连,该陀螺马达房(4)通过悬挂带(3)悬挂于外部壳体(2)的内部,陀螺马达房(4)内置所述陀螺马达(5),该陀螺马达(5)通过陀螺马达轴(14)与陀螺马达房(4)相连;所述外部壳体(2)上设有北向标识(1),所述北向标识(1)的标示方向为所述陀螺旋转轴(14)所指的正向方向,即陀螺马达高速旋转时角动量的方向;
所述的摆式陀螺仪还包括外部壳体(2)内部的第一光电传感器(6)、第一计数器(7)、第一反射镜(8)、第二反射镜(9)、计时器(10)、第二计数器(11)、第二光电传感器(12);所述计时器(10)位于陀螺马达房(4)的正下方,所述第一反射镜(8)和第二反射镜(9)安装在所述陀螺马达房(4)外部左右两端的对称位置,所述第一光电传感器(6)与第二光电传感器(12)对称安置于外部壳体(2)下方的内壁上,所述第一反射镜(8)的反射面与所述第一光电传感器(6)的发射/接收表面正对,所述第二反射镜(9)的反射面与所述第二光电传感器(12)的发射/接收表面正对;第一光电传感器(6)与第二光电传感器(12)分别连接到计时器(10);所述第一光电传感器(6)下方连接有第一计数器(7),所述第一计数器(7)的输出端连接到计时器(10),该第一计数器(7)用于记录第一光电传感器(6)的感应次数并将信号传递给计时器(10);第二光电传感器(12)下方连接有第二计数器(11),所述第二计数器(11)的输出端连接到计时器(10),该第二计数器(11)用于记录第二光电传感器(12)的感应次数并将信号传递给计时器(10);外部壳体(2)上设置有数据传输口(13),所述计时器(10)通过所述数据传输口(13)与外部计算机连接通信;
步骤二,测量摆式陀螺仪的摆动周期T;
步骤三,测量测站点的地理纬度
步骤四,外部计算机根据得到的摆式陀螺仪的摆动周期T和测站点的地理纬度 利用公式1计算地球自转角速度ωe:
(公式1)
其中,H为陀螺的角动量,G为陀螺灵敏部受到的重力,l为陀螺灵敏部重心到悬挂点的距离,ωe为地球自转角速度, 为测站点地理纬度。
2.如权利要求1所述的利用摆式陀螺仪测定地球自转角速度方法,其特征在于,所述的测量摆式陀螺仪的摆动周期T具体包括以下步骤:
1)使摆式陀螺仪的北向标识(1)指向北方向,偏差不超过5度;
2)启动陀螺马达(5),待陀螺马达(5)达到额定转速24000转/分钟后,第一光电传感器(6)向第一反射镜(8)发射光束,第二光电传感器(12)向第二反射镜(9)发射光束;
3)当第一光电传感器(6)第一次接收到第一反射镜(8)的反射光时,第一计数器(7)记下数字1;当第二光电传感器(12)第一次接收到第二反射镜(9)的反射光时,第二计数器(11)记下数字1;计时器(10)分别记录第一计数器(7)、第二计数器(11)记下数字1的计数时刻tA1、tB1;
4)随着陀螺旋转轴(14)在子午线方向左右摆动,当第一光电传感器(6)第二次接收到第一反射镜(8)的反射光时,第一计数器(7)记下数字2;当第二光电传感器(12)第二次接收到第二反射镜(9)的反射光时,第二计数器(11)记下数字2;
5)当第一光电传感器(6)第三次接收到第一反射镜(8)的反射光时,第一计数器(7)记下数字3;当第二光电传感器(12)第三次接收到第二反射镜(9)的反射光时,第二计数器(11)记下数字3;计时器(10)分别记录第一计数器(7)、第二计数器(11)记下数字3的计数时刻tA3、tB3;
6)将计时器(10)记录的时刻tA1、tB1、tA3、tB3,通过数据传输口(13)传输给外部计算机,外部计算机根据公式2计算陀螺摆动周期T:
说明书
技术领域
本发明属于地球物理、大地测量学、惯性导航技术领域,具体涉及一种测定地球自转角速度的方法,特别是一种利用摆式陀螺仪测量地球自转角速度的方法。本发明可以广泛应用于航空、航天、全球板块运动监测、深空探测研究等领域。
背景技术
地球本身由于其内部物质流分布的不均匀造成其自转的角速度不停的发生微小的变化,而地球角速度的变化也引起了每日日长的变化,因此,准确地测量地球自转角速度的变化对于航空、航天、地球物理学的研究都有着重要的实际意义和应用价值。
自20世纪70年代以来,人们采用多种观测技术对地球自转角速度进行测量,如VLBI技术、SLR技术以及GPS技术等,而这些技术大多需要大范围的地空联测,所需的设备造价昂贵,且获取观测数据的周期较长,数据后处理过程复杂。
发明内容
针对目前采用的测量地球自转角速度技术的缺陷或不足,本发明的目的在于,提供一种利用摆式陀螺仪测定地球自转角速度的方法,该方法简单易行,不需要大范围的地空联测,可以独立进行地球自转角速度测量,且后期数据处理速度较快,可实时监测地球自转角速度的变化。
为了达到上述目的,本发明采用如下技术解决方案:
一种利用摆式陀螺仪测量地球自转角速度的方法,具体包括以下步骤:
步骤一,将摆式陀螺仪安置于某测站点;
摆式陀螺仪包括外部壳体、悬挂带、陀螺马达房、陀螺马达、陀螺旋转轴;所述悬挂带的上端与外部壳体内部正上方中心相连,悬挂带的下端与所述陀螺马达房相连,该陀螺马达房通过悬挂带悬挂于外部壳体的内部,陀螺马达房内置所述陀螺马达,该陀螺马达通过陀螺马达轴与陀螺马达房相连;所述外部壳体上设有北向标识,所述北向标识的标示方向为所述陀螺旋转轴所指的正向方向;
所述的摆式陀螺仪还包括外部壳体内部的第一光电传感器、第一计数器、第一反射镜、第二反射镜、计时器、第二计数器、第二光电传感器;所述计时器位于陀螺马达房的正下方,所述第一反射镜和第二反射镜安装在所述陀螺马达房外部左右两端的对称位置,所述第一光电传感器与第二光电传感器对称安置于外部壳体下方的内壁上,所述第一反射镜的反射面与所述第一光电传感器的发射/接收表面正对,所述第二反射镜的反射面与所述第二光电传感器的发射/接收表面正对;第一光电传感器与第二光电传感器分别连接到计时器;所述第一光电传感器下方连接有第一计数器,所述第一计数器的输出端连接到计时器,该第一计数器用于记录第一光电传感器的感应次数并将信号传递给计时器;第二光电传感器下方连接有第二计数器,所述第二计数器的输出端连接到计时器,该第二计数器用于记录第二光电传感2的感应次数并将信号传递给计时器;外部壳体上设置有数据传输口,所述计时器通过所述数据传输口与外部计算机连接通信。
步骤二,测量摆式陀螺仪的摆动周期T;
步骤三,测量测站点的地理纬度
步骤四,外部计算机根据得到的摆式陀螺仪的摆动周期T和测站点的地理纬度 利用公式1计算地球自转角速度ωe:
(公式1)
其中,H为陀螺的角动量,G为陀螺灵敏部受到的重力,l为陀螺灵敏部重心到悬挂点的距离,ωe为地球自转角速度, 为测站点地理纬度。
本发明的理论根据如下:
高速旋转的陀螺由于受到地球自转因素的影响,会使陀螺旋转轴产生在子午线方向左右摆动的效应,陀螺旋转轴的摆动周期T为:
(公式3)
其中,H为陀螺的角动量,G为陀螺灵敏部受到的重力,l为陀螺灵敏部重心到悬挂点的距离,ωe为地球自转角速度, 为测站点地理纬度。其中,陀螺的角动量H,陀螺灵敏部受到的重力G以及陀螺灵敏部重心到悬挂点的距离l的值在陀螺仪出厂时已经作为已知参量确定。
上述悬挂点是指悬挂带与外部壳体所连接的点,陀螺灵敏部包括悬挂带、陀螺马达房、陀螺马达、第一反射镜、第二反射镜。
由公式3可得到地球自转角速度ωe:
(公式1)
其中, 的值通过GPS或天文观测获取,陀螺摆动周期T通过高精度的测时设备精确获取。
附图说明
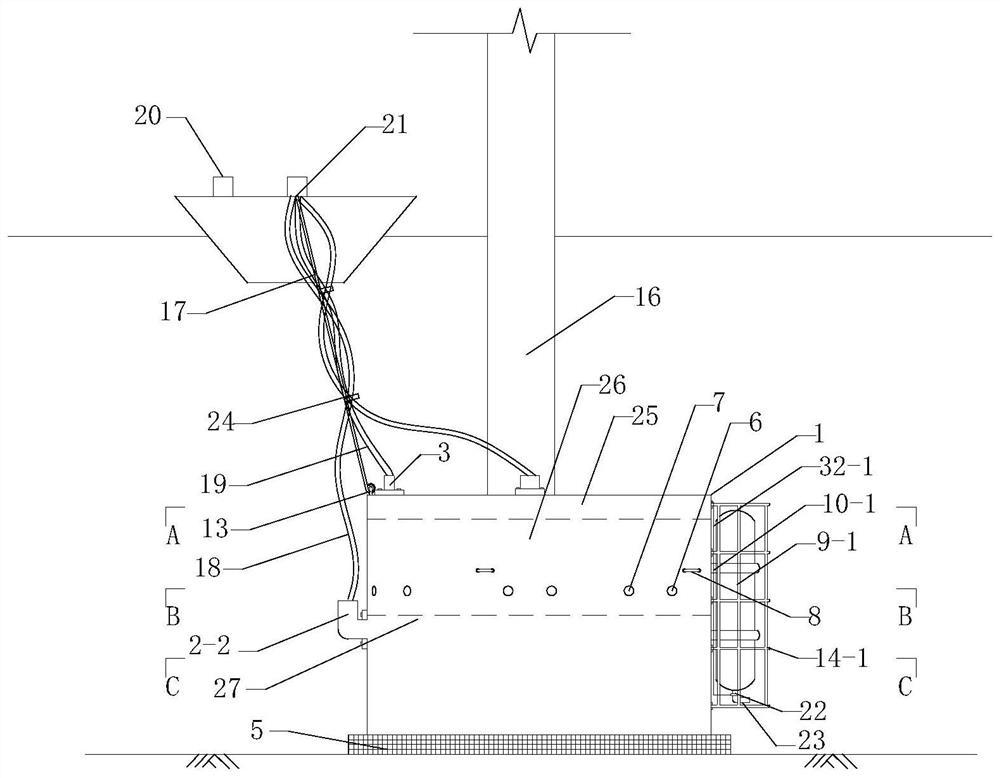
图1是本发明所使用的摆式陀螺仪的结构示意图。
以下结合附图与具体实施例对本发明做进一步的解释说明。
具体实施方式
一种利用摆式陀螺仪测量地球自转角速度的方法,具体包括以下步骤:
步骤一,将摆式陀螺仪安置于某测站点;
如图1所示,摆式陀螺仪包括外部壳体2、悬挂带3、陀螺马达房4、陀螺马达5、陀螺旋转轴14;所述悬挂带3的上端与外部壳体2内部正上方中心相连,悬挂带3的下端与所述陀螺马达房4相连,该陀螺马达房4通过悬挂带3悬挂于外部壳体2的内部,陀螺马达房4内置所述陀螺马达5,该陀螺马达5通过陀螺马达轴14与陀螺马达房4相连;所述外部壳体2上设有北向标识1,所述北向标识1的标示方向为所述陀螺旋转轴14所指的正向方向,即陀螺马达高速旋转时角动量的方向;
所述的摆式陀螺仪还包括外部壳体2内部的第一光电传感器6、第一计数器7、第一反射镜8、第二反射镜9、计时器10、第二计数器11、第二光电传感器12;所述计时器10位于陀螺马达房4的正下方,所述第一反射镜8和第二反射镜9安装在所述陀螺马达房4外部左右两端的对称位置,所述第一光电传感器6与第二光电传感器12对称安置于外部壳体2下方的内壁上,所述第一反射镜8的反射面与所述第一光电传感器6的发射/接收表面正对,所述第二反射镜9的反射面与所述第二光电传感器12的发射/接收表面正对;第一光电传感器6与第二光电传感器12分别连接到计时器10;所述第一光电传感器6下方连接有第一计数器7,所述第一计数器7的输出端连接到计时器10,该第一计数器7用于记录第一光电传感器6的感应次数并将信号传递给计时器10;第二光电传感器12下方连接有第二计数器11,所述第二计数器11的输出端连接到计时器10,该第二计数器11用于记录第二光电传感器12的感应次数并将信号传递给计时器10;外部壳体2上设置有数据传输口13,所述计时器10通过所述数据传输口13与外部计算机连接通信。
步骤二,测量摆式陀螺仪的摆动周期T,具体步骤如下:
1)使摆式陀螺仪的北向标识1指向北方向,偏差不超过5度;
2)启动陀螺马达5,待陀螺马达5达到额定转速后,第一光电传感器6向第一反射镜8发射光束,第二光电传感器12向第二反射镜9发射光束;
3)当第一光电传感器6第一次接收到第一反射镜8的反射光时,第一计数器7记下数字1;当第二光电传感器12第一次接收到第二反射镜9的反射光时,第二计数器11记下数字1;计时器10分别记录第一计数器7、第二计数器11记下数字1的计数时刻tA1、tB1;
4)随着陀螺旋转轴14在子午线方向左右摆动,当第一光电传感器6第二次接收到第一反射镜8的反射光时,第一计数器7记下数字2;当第二光电传感器12第二次接收到第二反射镜9的反射光时,第二计数器11记下数字2;
5)当第一光电传感器6第三次接收到第一反射镜8的反射光时,第一计数器7记下数字3;当第二光电传感器12第三次接收到第二反射镜9的反射光时,第二计数器11记下数字3;计时器10分别记录第一计数器7、第二计数器11记下数字3的计数时刻tA3、tB3;
6)将计时器10记录的时刻tA1、tB1、tA3、tB3,通过数据传输口13传输给外部计算机,外部计算机根据公式2计算陀螺摆动周期T:
步骤三,通过GPS或天文观测获取测站点的地理纬度 的值;
步骤四,外部计算机根据得到的摆式陀螺仪的摆动周期T和测站点的地理纬度 利用公式1计算地球自转角速度ωe:
(公式1)
其中,H为陀螺的角动量,G为陀螺灵敏部受到的重力,l为陀螺灵敏部重心到悬挂点的距离,ωe为地球自转角速度, 为测站点地理纬度。陀螺的角动量H,陀螺灵敏部受到的重力G以及陀螺灵敏部重心到悬挂点的距离l的值在陀螺仪出厂时已经作为已知参量确定。
上述悬挂点是指悬挂带与外部壳体所连接的点,陀螺灵敏部包括悬挂带、陀螺马达房、陀螺马达、第一反射镜、第二反射镜。
一种利用摆式陀螺仪测量地球自转角速度的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0