





专利摘要
本发明公开了一种无人艇智能布设锚雷装置,包括无人艇和设在无人艇上的传输架,传输架包括与无人艇艇仓基板转动连接的底座,底座上设有支撑杆,支撑杆上滑动设有托举机构,托举机构可沿支撑杆上下滑动;支撑杆的顶端固定连接有水平设置的U型滑轨,U型滑轨靠近支撑杆的一端滑动设有夹传机构,夹传机构可沿U型滑轨左右滑动;U型滑轨另一端底壁上设有连接竖杆,连接竖杆上部滑动设有夹放机构,夹放机构可沿连接竖杆上下滑动,连接竖杆的底端设有连接板,连接板顶面上设有第一压力传感器,连接板底面上设有声呐。该装置结构简单,设计合理,利用无人艇作为载体,进行无人自动化布雷,提高锚雷布设的效率和安全性。
权利要求
1.一种无人艇智能布设锚雷装置,包括无人艇,其特征在于,还包括设在无人艇上的传输架,所述传输架包括与无人艇艇仓基板转动连接的底座,底座上设有支撑杆,支撑杆上滑动设有托举机构;支撑杆的顶端固定连接有水平设置的U型滑轨,U型滑轨靠近支撑杆的一端滑动设有夹传机构,U型滑轨另一端底壁上设有连接竖杆,连接竖杆上部滑动设有夹放机构,连接竖杆的底端设有连接板,连接板顶面上设有第一压力传感器,连接板底面上设有声呐。
2.根据权利要求1所述的无人艇智能布设锚雷装置,其特征在于,所述托举机构包括滑动连接在支撑杆上的托板,托板的一端设有倒锥形结构的支撑托盘。
3.根据权利要求1所述的无人艇智能布设锚雷装置,其特征在于,所述夹传机构包括两个对称设置的夹板,夹板底壁上设有与U型滑轨相适配的夹传滑槽,夹板上设有视觉传感器;两个夹板相对的面为弧形面,每个弧形面的两端部对称设有可滑动的夹盘。
4.根据权利要求3所述的无人艇智能布设锚雷装置,其特征在于,所述夹盘一端设有锥形盘状结构的夹紧部,夹紧部内设有第二压力传感器。
5.根据权利要求1所述的无人艇智能布设锚雷装置,其特征在于,所述夹放机构包括与连接竖杆滑动配合的支撑板;支撑板的侧壁上对称设有两个弧形夹,弧形夹与支撑板滑动连接。
6.根据权利要求1所述的无人艇智能布设锚雷装置,其特征在于,所述U型滑轨为可伸缩结构,U型滑轨底壁两端设有缺口,所述U型滑轨的两端设有限位块。
7.根据权利要求1或6所述的无人艇智能布设锚雷装置,其特征在于,所述U型滑轨的底壁上设有支撑滑杆,无人艇甲板上设有与支撑滑杆下端相适配的弧形的限位滑槽。
8.根据权利要求1所述的无人艇智能布设锚雷装置,其特征在于,所述连接竖杆为伸缩杆。
9.一种利用无人艇智能布设锚雷装置进行布雷的方法,其特征在于,包括以下步骤:
(1)接到锚雷布设任务时,在无人艇艇仓中装入足量的锚雷,启动无人艇智能布设锚雷装置,无人艇智能布设锚雷装置按照无人艇卫星定位系统的定位信息抵达指定布雷区域,开启声呐发射和接收声波信号;
(2)声呐检测到海下地形状况符合锚雷下放条件时,启动托举机构,托举机构托举锚雷沿支撑杆向上滑动,当夹传机构上的视觉传感器检测到锚雷穿过U型滑轨底壁上的缺口时,启动夹传机构上的夹盘,夹盘向靠近锚雷中心方向滑动,夹紧锚雷;
(3)第二压力传感器检测到夹盘夹紧锚雷过程中的压力达到设定值时,夹盘停止滑动,完成夹紧锚雷动作;
(4)伸长U型滑轨,使U型滑轨向无人艇船尾方向伸出并伸长至极限位置,启动夹传机构沿U型滑轨滑动至U型滑轨末端,启动夹盘向远离锚雷的方向滑动,释放锚雷至夹放机构的两个弧形夹之间,弧形夹夹紧锚雷;
(5)使连接竖杆伸长至极限位置,夹放机构沿连接竖杆向下滑动,锚雷随夹放机构下降,当夹放机构与连接板接触,夹放机构停止下滑,启动弧形夹向远离锚雷的方向滑动,夹放机构释放锚雷至水中;
(6)转动底座,使支撑滑杆沿无人艇甲板上的限位滑槽滑动至限位滑槽的一端,布设锚雷装置转动到无人艇的一侧,重复步骤(2)-(5),继续进行布雷;
(7)当无人艇艇仓中的锚雷依次布设完成时,无人艇智能布设锚雷装置完成布雷任务,返航。
说明书
技术领域
本发明涉及锚雷布设技术领域,具体涉及一种无人艇智能布设锚雷装置及其利用该无人艇智能布设锚雷装置进行布雷的方法。
背景技术
锚雷是一种布设在水中的兵器,是水雷中的一种类型,有固定位置,固定在一定深度上,要与敌方舰船相撞,才会引爆。锚雷作为海战中的主要武器之一,其布设问题已成为关键技术。目前多数靠人工驾驶舰船布设锚雷,布设效率和人员安全性较低,对于海战的快速防御及反击有一定的拖滞影响。因此,提高锚雷布设过程中的人员安全性及布设效率,需要一套装置替代人工驾驶舰船布设锚雷。
发明内容
针对现有技术中存在的问题和不足,本发明提供一种无人艇智能布设锚雷装置及其利用该无人艇智能布设锚雷装置进行布雷的方法。该无人艇智能布设锚雷装置结构简单,设计合理,利用无人艇作为载体,进行无人自动化布雷,提高锚雷布设的效率,同时也避免人工驾驶舰艇触碰锚雷等意外的发生,提高无人布设锚雷的安全性。
为实现发明目的,本发明采用的技术方案为:
一种无人艇智能布设锚雷装置,包括无人艇,还包括设在无人艇上的传输架,所述传输架包括与无人艇艇仓基板转动连接的底座,底座上设有支撑杆,支撑杆上滑动设有托举机构,托举机构可沿支撑杆上下滑动;支撑杆的顶端固定连接有水平设置的U型滑轨,U型滑轨靠近支撑杆的一端滑动设有夹传机构,夹传机构可沿U型滑轨左右滑动;U型滑轨另一端底壁上设有连接竖杆,连接竖杆上部滑动设有夹放机构,夹放机构可沿连接竖杆上下滑动,连接竖杆的底端设有连接板,连接板顶面上设有第一压力传感器,连接板底面上设有声呐。所述第一压力传感器用于检测和反馈夹放机构触碰连接板时的压力。所述声呐通过发射和接收声波信号监测指定位置的海下地形状况,判断是否符合锚雷下放条件。
根据上述的无人艇智能布设锚雷装置,优选地,所述托举机构包括滑动连接在支撑杆上的托板,托板的一端设有倒锥形结构的支撑托盘。更加优选地,托板上设有与支撑杆间隙配合的通孔;托板通过通孔沿支撑杆上下滑动。
根据上述的无人艇智能布设锚雷装置,优选地,所述夹传机构包括两个对称设置的夹板,夹板底壁上设有与U型滑轨相适配的夹传滑槽,夹板上设有视觉传感器;两个夹板相对的面为弧形面,每个弧形面的两端部对称设有可滑动的夹盘,夹盘可沿弧形面端部左右滑动。更加优选地,所述弧形面的端部开设有第一燕尾型滑槽,所述夹盘与弧形面端部接触的部位开设有与第一燕尾型滑槽相适配的第一燕尾型滑轨,夹盘通过第一燕尾型滑轨与第一燕尾型滑槽的配合实现沿弧形面端部左右滑动。
根据上述的无人艇智能布设锚雷装置,优选地,所述夹盘一端设有锥形盘状结构的夹紧部,夹紧部内设有第二压力传感器。所述第二压力传感器用于检测和反馈夹盘夹紧锚雷过程中的力。
根据上述的无人艇智能布设锚雷装置,优选地,所述夹放机构包括与连接竖杆滑动配合的支撑板;支撑板的侧壁上对称设有两个弧形夹,弧形夹与支撑板滑动连接。更加优选地,支撑板上设有与连接竖杆间隙配合的通孔,支撑板通过通孔沿连接竖杆上下滑动;所述支撑板的侧壁上开设有第二燕尾型滑槽,所述弧形夹与支撑板侧壁接触的部位开设有与第二燕尾型滑槽相适配的第二燕尾型滑轨,弧形夹通过第二燕尾型滑轨与第二燕尾型滑槽的配合实现沿支撑板前后滑动。
根据上述的无人艇智能布设锚雷装置,优选地,弧形夹的内侧设有第三压力传感器,第三压力传感器用于检测和反馈弧形夹夹紧锚雷过程中的力。
根据上述的无人艇智能布设锚雷装置,优选地,所述U型滑轨为可伸缩结构,U型滑轨底壁两端设有供锚雷穿过缺口,所述U型滑轨的两端设有限位块,限位块用于防止夹传机构脱离U型滑轨。更加优选地,所述U型滑轨为多段套接结构,通过多段套接实现U型滑轨的伸缩。
根据上述的无人艇智能布设锚雷装置,优选地,所述U型滑轨的底壁上设有支撑滑杆,无人艇甲板上设有与支撑滑杆下端相适配的弧形的限位滑槽,限位滑槽用于防止支撑滑杆过度旋转。
根据上述的无人艇智能布设锚雷装置,优选地,所述连接竖杆为伸缩杆。更加优选地,所述伸缩杆为多段套接结构,通过多段套接实现伸缩。
一种利用无人艇智能布设锚雷装置进行布雷的方法,包括以下步骤:
(1)接到锚雷布设任务时,在无人艇艇仓中装入足量的锚雷,启动无人艇智能布设锚雷装置,无人艇智能布设锚雷装置按照无人艇卫星定位系统的定位信息抵达指定布雷区域,开启声呐发射和接收声波信号;
(2)声呐检测到海下地形状况符合锚雷下放条件时,启动托举机构,托举机构托举锚雷沿支撑杆向上滑动,当夹传机构上的视觉传感器检测到锚雷穿过U型滑轨底壁上的缺口时,启动夹传机构上的夹盘,夹盘向靠近锚雷中心方向滑动,夹紧锚雷,然后再次启动托举机构,使托举机构沿支撑杆向下滑动,返回至初始位置;
(3)第二压力传感器检测到夹盘夹紧锚雷过程中的压力达到设定值时,夹盘停止滑动,完成夹紧锚雷动作;
(4)伸长U型滑轨,使U型滑轨向无人艇船尾方向伸出并伸长至极限位置,启动夹传机构沿U型滑轨滑动至U型滑轨末端,启动夹盘向远离锚雷的方向滑动,释放锚雷至夹放机构的两个弧形夹之间,弧形夹夹紧锚雷,夹传机构沿U型滑轨返回至初始位置;
(5)使连接竖杆伸长至极限位置,夹放机构沿连接竖杆向下滑动,锚雷随夹放机构下降,当夹放机构与连接板接触,夹放机构停止下滑,启动弧形夹向远离锚雷的方向滑动,夹放机构释放锚雷至水中,再次启动夹放机构,使夹放机构沿连接竖杆向上滑动,返回至初始位置;
(6)转动底座,使支撑滑杆沿无人艇甲板上的限位滑槽滑动至限位滑槽的一端,布设锚雷装置转动到无人艇的一侧,重复步骤(2)-(5),继续进行布雷;
(7)当无人艇艇仓中的锚雷依次布设完成时,无人艇智能布设锚雷装置完成布雷任务,返航
与现有技术相比,本发明取得的有益效果为:
(1)本发明中布设锚雷装置连接板的底部设有声呐,声呐通过发射和接收声波信号监测指定位置的海下地形状况,判断是否符合锚雷下放条件,因此,本发明无人艇智能布设锚雷装置能够根据不同水域的海底地形布设不同数量锚雷的需求,提高了锚雷布设的合理性。
(2)本发明中传输架的底座与无人艇艇仓基板转动连接,U型滑轨的底壁上的支撑滑杆可沿无人艇甲板上的限位滑槽滑动,通过底座的转动可带动整个布设锚雷装置进行旋转式布雷,提高了锚雷布设效率。
(3)本发明中U型滑轨为可伸缩结构,连接竖杆为伸缩杆,便于收缩存放,减小占地空间。
(4)本发明中布设锚雷装置结构简单,设计合理,操作稳定,利用无人艇作为载体,进行无人自动化布设锚雷,提高了锚雷布设效率,实现无人化布设锚雷,同时避免人工驾驶舰艇触碰锚雷等意外的发生,提高布设锚雷的安全性。
(5)本发明的布雷方法采用无人艇与布设锚雷装置相结合进行救援,进一步提高了锚雷布设的无人化和自主化程度,实现了无人化布设锚雷,提高了锚雷布设效率,同时,利用无人艇作为载体,避免了人工驾驶舰艇触碰锚雷等意外的发生,提高布设锚雷的安全性,解决了传统人工驾驶船舰布设锚雷的作业效率低和安全性差的问题。
附图说明
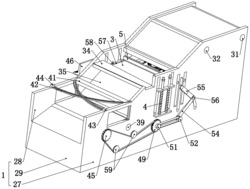
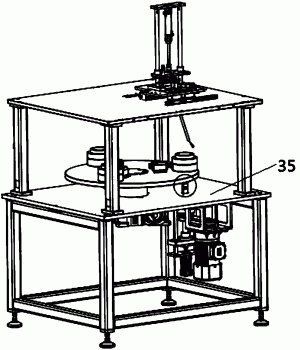
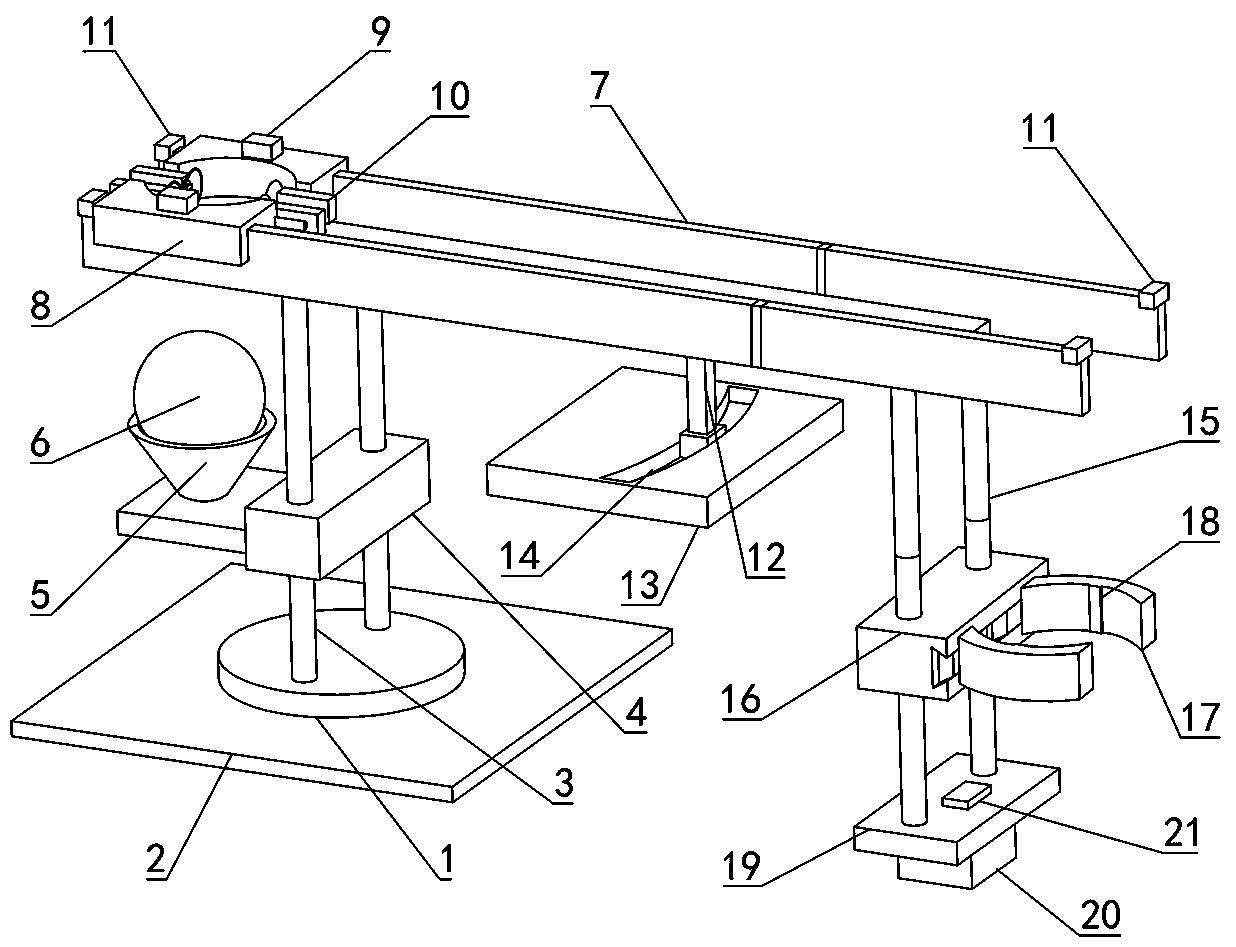
图1为本发明中布设锚雷装置的结构示意图;
图2为本发明中传输架的结构示意图;
图3为本发明中托举机构的结构示意图;
图4为本发明中夹传机构的结构示意图;
图5为本发明中夹放机构的结构示意图;
图中:1为底座,2为无人艇艇仓基板,3为支撑杆,4为托板,5为支撑托盘,6为锚雷,7为U型滑轨,8为夹板,9为视觉传感器,10为夹盘,11为限位块,12为支撑滑杆,13为无人艇甲板,14为限位滑槽,15为连接竖杆,16为支撑板,17为弧形夹,18为第三压力传感器,19为连接板,20为声呐,21为第一压力传感器,22为第一通孔,23为夹传滑槽,24为弧形面,25为第二压力传感器,26为第一燕尾型滑槽,27为第一燕尾型滑轨,28为第二通孔,29为第二燕尾型滑槽。
具体实施方式
以下通过具体的实施例对本发明作进一步详细说明,但并不限制本发明的范围。
实施例1:
一种无人艇智能布设锚雷装置,包括无人艇和设在无人艇上的传输架,如图1-图2所示,其中图1中并未画出无人艇的结构,所述传输架包括与无人艇艇仓基板2转动连接的底座1,底座1上设有支撑杆3,支撑杆3上滑动设有托举机构,托举机构可沿支撑杆3上下滑动;支撑杆3的顶端固定连接有水平设置的U型滑轨7,U型滑轨7为可伸缩结构,U型滑轨7底壁两端设有供锚雷穿过缺口,U型滑轨7的两端设有限位块11;U型滑轨7的底壁上设有支撑滑杆12,无人艇甲板13上设有与支撑滑杆12下端相适配的弧形的限位滑槽14,限位滑槽14用于防止支撑滑杆12过度旋转。U型滑轨7靠近支撑杆3的一端滑动设有夹传机构,夹传机构可沿U型滑轨7左右滑动;U型滑轨7另一端底壁上设有连接竖杆15,所述连接竖杆15为伸缩杆,连接竖杆15上部滑动设有夹放机构,夹放机构可沿连接竖杆15上下滑动,连接竖杆15的底端设有连接板19,连接板19顶面上设有第一压力传感器21,第一压力传感器21用于检测和反馈夹放机构触碰连接板时的压力,连接板19底面上设有声呐20,声呐20通过发射和接收声波信号监测指定位置的海下地形状况,判断是否符合锚雷下放条件。
如图3所示,托举机构包括滑动连接在支撑杆上的托板4,托板4上设有与支撑杆3间隙配合的第一通孔22;托板4通过通孔22沿支撑杆上下滑动,托板4的一端设有倒锥形结构的支撑托盘5。
如图4所示,夹传机构包括两个对称设置的夹板8,夹板8底壁上设有与U型滑轨7相适配的夹传滑槽23,夹板8上设有视觉传感器9;两个夹板8相对的面为弧形面24,每个弧形面24的两端部对称设有可滑动的夹盘10,夹盘10可沿弧形面端部左右滑动。弧形面24的端部开设有第一燕尾型滑槽26,夹盘10与弧形面24端部接触的部位开设有与第一燕尾型滑槽26相适配的第一燕尾型滑轨27,夹盘10通过第一燕尾型滑轨27与第一燕尾型滑槽26的配合实现沿弧形面24端部左右滑动。夹盘10一端设有锥形盘状结构的夹紧部,夹紧部内设有第二压力传感器25,第二压力传感器25用于检测和反馈夹盘10夹紧锚雷6过程中的力。
如图5所示,夹放机构包括与连接竖杆15滑动配合的支撑板16,支撑板16上开设有与连接竖杆15间隙配合的第二通孔28,支撑板16可沿连接竖杆15上下滑动;支撑板16的侧壁上对称设有两个弧形夹17,弧形夹17与支撑板16滑动连接,弧形夹17的内侧设有第三压力传感器18。支撑板16的侧壁上开设有第二燕尾型滑槽29,弧形夹17与支撑板16侧壁接触的部位开设有与第二燕尾型滑槽29相适配的第二燕尾型滑轨,弧形夹17通过第二燕尾型滑轨与第二燕尾型滑槽29的配合实现沿支撑板16前后滑动。
实施例2:
一种利用实施例1所述无人艇智能布设锚雷装置进行布雷的方法,包括以下步骤:
(1)接到锚雷布设任务时,在无人艇艇仓中装入足量的锚雷,启动无人艇智能布设锚雷装置,无人艇智能布设锚雷装置按照无人艇卫星定位系统的定位信息抵达指定布雷区域,开启声呐20发射和接收声波信号;
(2)声呐20检测到海下地形状况符合锚雷下放条件时,启动托举机构,托举机构托举锚雷沿支撑杆3向上滑动,当夹传机构上的视觉传感器9检测到锚雷穿过U型滑轨7底壁上的缺口时,托举机构停止滑动,启动夹传机构上的夹盘10,夹盘10向靠近锚雷中心方向滑动,夹紧锚雷,然后再次启动托举机构,使托举机构沿支撑杆3向下滑动,返回至初始位置;
(3)第二压力传感器25检测到夹盘10夹紧锚雷过程中的压力达到设定值时,夹盘10停止滑动,完成夹紧锚雷动作;
(4)伸长U型滑轨7,使U型滑轨向无人艇船尾方向伸出并伸长至极限位置,启动夹传机构沿U型滑轨7滑动至U型滑轨7末端,启动夹盘10向远离锚雷的方向滑动,释放锚雷至夹放机构的两个弧形夹17之间,弧形夹17夹紧锚雷,夹传机构沿U型滑轨7返回至初始位置;
(5)使连接竖杆15伸长至极限位置,夹放机构沿连接竖杆15向下滑动,锚雷随夹放机构下降,当夹放机构与连接板16接触,夹放机构停止下滑,启动弧形夹17向远离锚雷的方向滑动,夹放机构释放锚雷至水中,再次启动夹放机构,使夹放机构沿连接竖杆15向上滑动,返回至初始位置;
(6)转动底座1,使支撑滑杆12沿无人艇甲板13上的限位滑槽14滑动至限位滑槽14的一端,此时,布设锚雷装置转动到无人艇的一侧,重复步骤(2)-(5),继续进行布雷;
(7)当无人艇艇仓中的锚雷依次布设完成时,无人艇智能布设锚雷装置完成布雷任务,返航。
以上所述仅为本发明的较佳实施例而已,但不仅限于上述实例,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
一种无人艇智能布设锚雷装置及其进行布雷的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


动态评分
0.0