



专利摘要
本发明公开了一种市政道路用可飞行机器人,包括机架,所述机架上设有四组行走机构,四组所述行走机构分别设于机架两侧的前后位置处,其特征在于,所述行走机构包括空心轴和实心轴,所述空心轴套设于实心轴外圈,所述空心轴与实心轴之间通过轴承连接,所述空心轴外圈通过轴承连接于机架的侧壁上,所述空心轴的外圈位于机架外侧处固连第一支撑臂,所述实心轴的两端长出空心轴,所述实心轴的外圈位于机架外侧处设有第二支撑臂,所述第一支撑臂与第二支撑臂分别位于空心轴轴线的两侧。本发明通过四组行走机构,可实现机器人的行走和跑跳,且能适应复杂地形,各个行走机构可独立调节,相互配合,具有多种行走方式,机架可通过行走机构的调节来升降高度,具有实用性。
权利要求
1.一种市政道路用可飞行机器人,包括机架,所述机架上设有四组行走机构,四组所述行走机构分别设于机架两侧的前后位置处,其特征在于,所述行走机构包括空心轴和实心轴,所述空心轴套设于实心轴外圈,所述空心轴与实心轴之间通过轴承连接,所述空心轴外圈通过轴承连接于机架的侧壁上,所述空心轴的外圈位于机架外侧处固连第一支撑臂,所述实心轴的两端长出空心轴,所述实心轴的外圈位于机架外侧处设有第二支撑臂,所述第一支撑臂与第二支撑臂分别位于空心轴轴线的两侧,所述第一支撑臂的外端部通过转轴连接有第三支撑臂,所述第二支撑部的外端部通过转轴连接有第四支撑臂,所述第三支撑臂的另一端部与所述第四支撑臂的另一端部通过转轴相连,所述空心轴上位于机架内侧处设有第一齿轮,所述机架的侧壁上设有第一电机,所述第一电机通过齿轮啮合传动于第一齿轮,所述实心轴位于机架内侧处的端部设有第二齿轮,所述机架的侧壁上还设有第二电机,所述第二电机通过齿轮啮合传动于第二齿轮;
所述机架上端的四角各设有一旋翼装置,所述旋翼装置包括设于机架上的第三电机、与第三电机相连的旋翼以及设于旋翼周圈的滑环,所述滑环与旋翼之间具有间隙,所述第三电机驱动旋翼转动,所述滑环上设有多个滑轮组,所述滑轮组包括两个对应设置的滑轮,所述滑轮上设有环形槽,所述滑轮组的其中一滑轮的环形槽与滑环的内径形成滚动摩擦,另一滑轮的环形槽与滑环的外径形成滚动摩擦,所述滑轮通过轴承连接于竖轴上,所述竖轴设于机架上。
2.根据权利要求1所述的实心轴,其特征在于,所述实心轴由铝合金制成。
说明书
技术领域
本发明涉及机器设备技术领域,特别是指一种市政道路用可飞行机器人。
背景技术
现有技术的机器人的行走可通过多种方式进行实现,但是在灵活性上均存在不足之处,无法适应复杂地形,容易倾翻;另外现有的机器人没有又可以行走又可以飞行的,需要改进。
发明内容
本发明所要解决的技术问题是提供一种市政道路用可飞行机器人,以解决现有技术中机器人无法适应复杂地形且可行走机器人无法飞行的技术问题。
为解决上述技术问题,本发明的实施例提供一种市政道路用可飞行机器人,包括机架,所述机架上设有四组行走机构,四组所述行走机构分别设于机架两侧的前后位置处,所述行走机构包括空心轴和实心轴,所述空心轴套设于实心轴外圈,所述空心轴与实心轴之间通过轴承连接,所述空心轴外圈通过轴承连接于机架的侧壁上,所述空心轴的外圈位于机架外侧处固连第一支撑臂,所述实心轴的两端长出空心轴,所述实心轴的外圈位于机架外侧处设有第二支撑臂,所述第一支撑臂与第二支撑臂分别位于空心轴轴线的两侧,所述第一支撑臂的外端部通过转轴连接有第三支撑臂,所述第二支撑部的外端部通过转轴连接有第四支撑臂,所述第三支撑臂的另一端部与所述第四支撑臂的另一端部通过转轴相连,所述空心轴上位于机架内侧处设有第一齿轮,所述机架的侧壁上设有第一电机,所述第一电机通过齿轮啮合传动于第一齿轮,所述实心轴位于机架内侧处的端部设有第二齿轮,所述机架的侧壁上还设有第二电机,所述第二电机通过齿轮啮合传动于第二齿轮;
所述机架上端的四角各设有一旋翼装置,所述旋翼装置包括设于机架上的第三电机、与第三电机相连的旋翼以及设于旋翼周圈的滑环,所述滑环与旋翼之间具有间隙,所述第三电机驱动旋翼转动,所述滑环上设有多个滑轮组,所述滑轮组包括两个对应设置的滑轮,所述滑轮上设有环形槽,所述滑轮组的其中一滑轮的环形槽与滑环的内径形成滚动摩擦,另一滑轮的环形槽与滑环的外径形成滚动摩擦,所述滑轮通过轴承连接于竖轴上,所述竖轴设于机架上。
所述实心轴由铝合金制成。
本发明的上述技术方案的有益效果如下:
上述方案中,本发明通过四组行走机构,可实现机器人的行走和跑跳,且能适应复杂地形,各个行走机构可独立调节,相互配合,具有多种行走方式,机架可通过行走机构的调节来升降高度,具有实用性;另外还设有旋翼装置,可供机器人飞行用,再者旋翼装置中设有滑环,滑环即可以保护旋翼不受损毁,又可以对机器人在行走时起导正作用,不会直接去撞墙。
附图说明
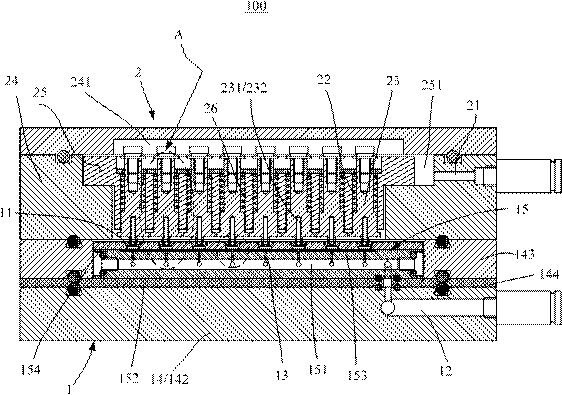
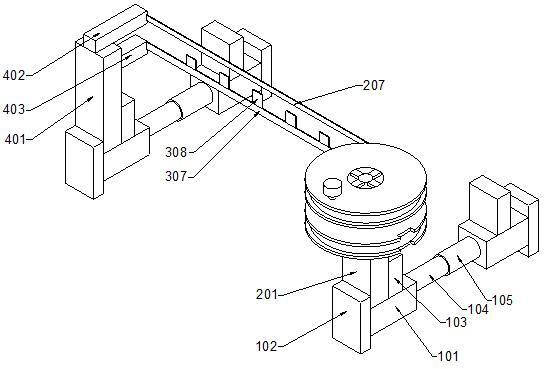
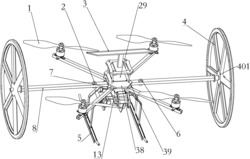
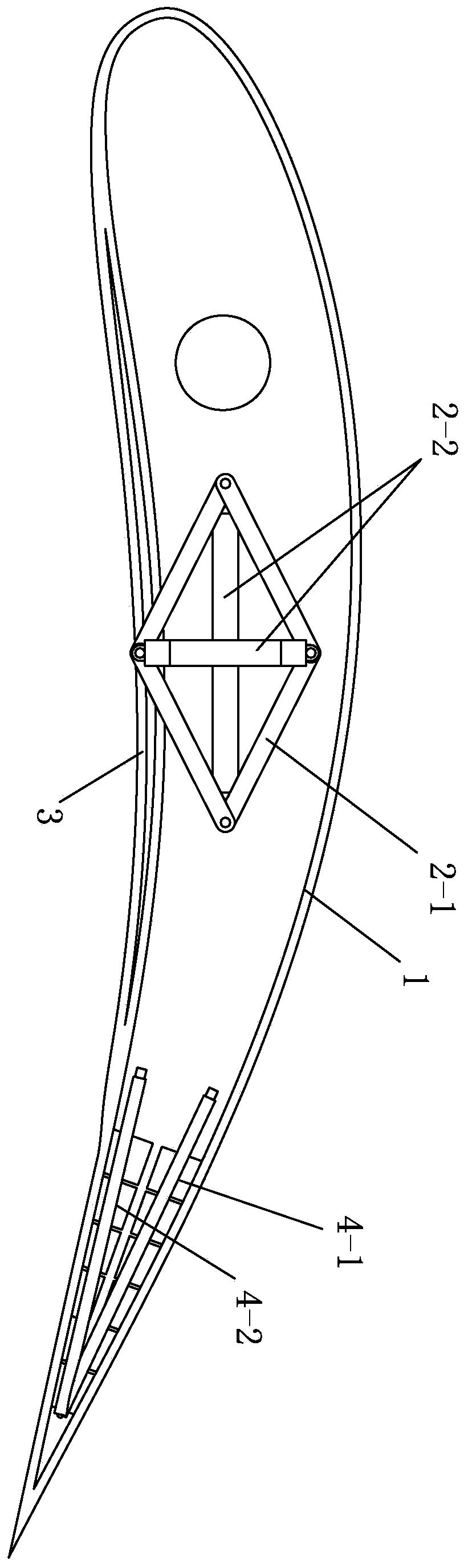
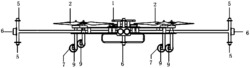
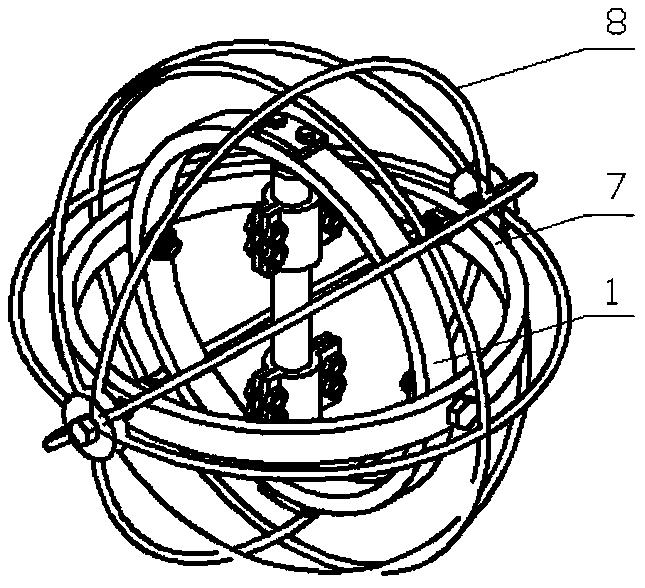
图1为本发明的立体图。
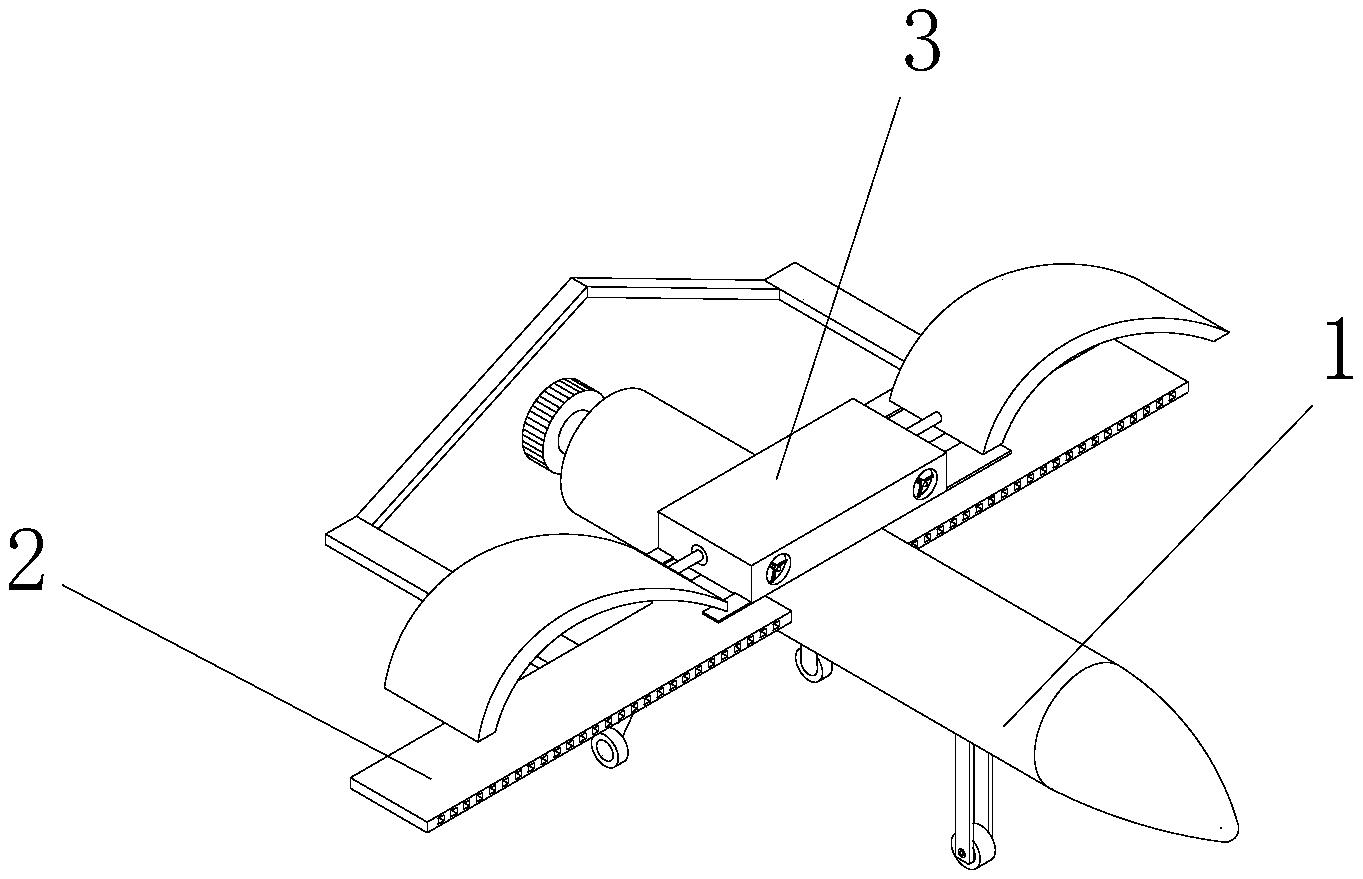
图2为本发明的行走机构的立体图。
图3为本发明的行走机构的着地点的示意图。
图4为本发明的行走机构的行走时的变化示意图一。
图5为本发明的行走机构的行走时的变化示意图二。
图6为本发明的行走机构的行走时的变化示意图三。
图7为本发明的行走机构在用于机架高度调整时的变化示意图。
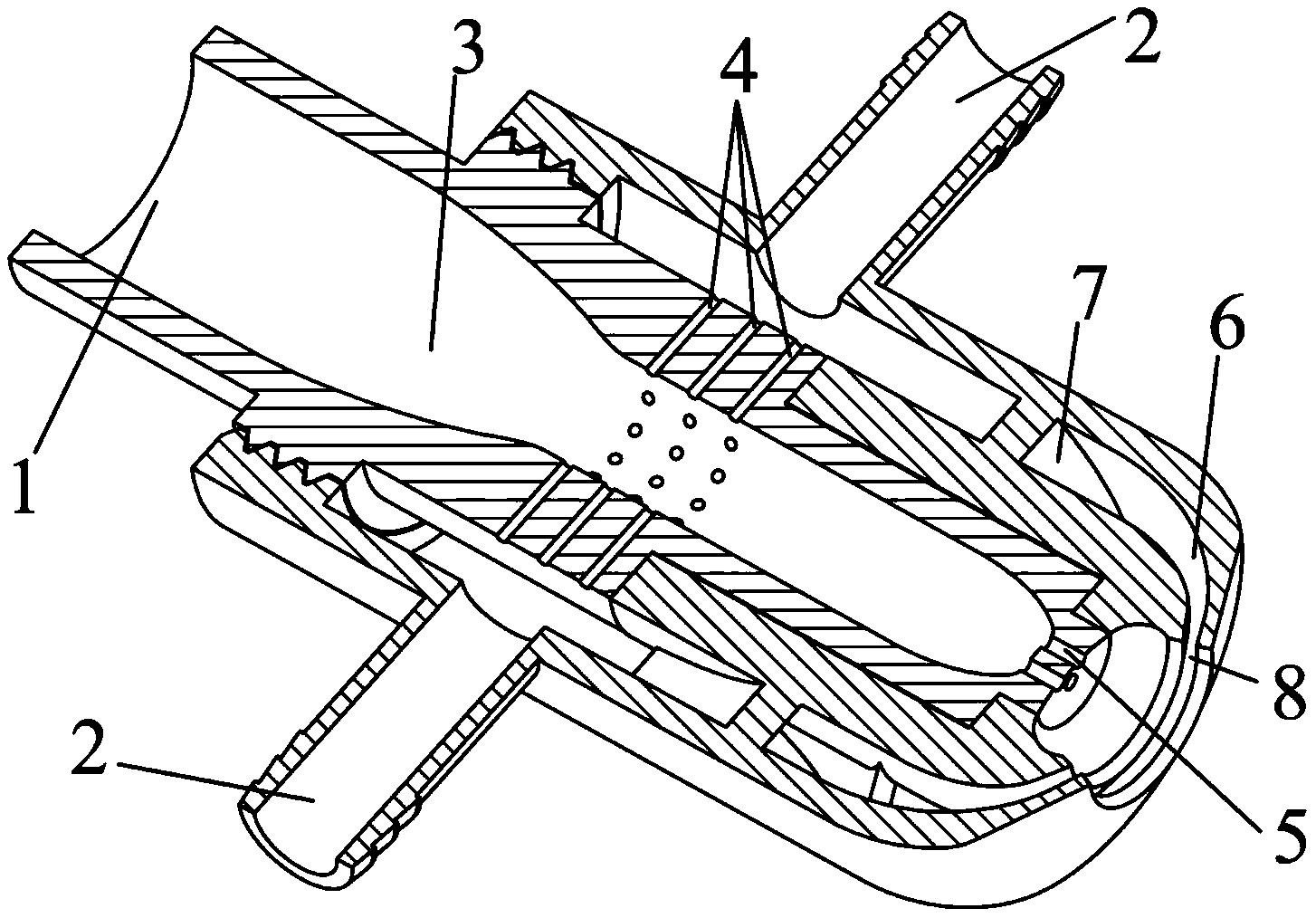
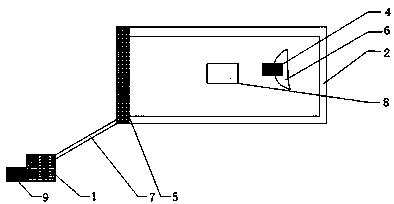
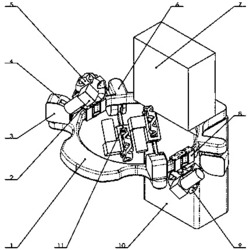
图8为本发明的旋翼装置的结构图。
具体实施方式
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
为方便说明,图1中左侧方向为前,右侧方向为后。
如图1至图6所示,本发明实施例提供一种市政道路用可飞行机器人,包括水平设置的机架1,所述机架1上设有四组行走机构2,四组所述行走机构2分别设于机架1两侧的前后位置处,位置分别为机架1的左前侧、右前侧、左后侧、右后侧,类似于汽车四轮安装位置,所述行走机构2包括空心轴21和实心轴22,所述空心轴21套设于实心轴22外圈,所述空心轴21与实心轴22之间通过轴承(未图示)连接,轴承连接为现有技术,在此不作赘述,通过轴承连接可实现空心轴21与实心轴22同轴设置相可相对转动,互不影响,所述空心轴21外圈通过轴承连接于机架1的侧壁上,所述空心轴21与实心轴22水平设置,所述空心轴21的外圈位于机架1外侧处固连第一支撑臂23,所述实心轴22的两端长出空心轴21,所述实心轴22的外圈位于机架1外侧处设有第二支撑臂24,所述第一支撑臂23与第二支撑臂24分别位于空心轴21轴线的两侧,所述第一支撑臂23的外端部通过转轴3连接有第三支撑臂25,所述第二支撑部24的外端部通过转轴3连接有第四支撑臂26,所述第三支撑臂25的另一端部与所述第四支撑臂26的另一端部通过转轴3相连,所述空心轴21上位于机架1内侧处设有第一齿轮27,所述机架1的侧壁上设有第一电机4,所述第一电机4通过齿轮啮合传动于第一齿轮27,所述实心轴22位于机架1内侧处的端部设有第二齿轮28,所述机架1的侧壁上还设有第二电机5,所述第二电机5通过齿轮啮合传动于第二齿轮28。第一支撑臂23、第二支撑臂24、第三支撑臂25、第四支撑臂26组成了一个四边形的行走机构,第三支撑臂25和第四支撑臂26的连接处为着地点6(如图3所示),因此可将第三支撑臂25和第四支撑臂26与地面相接触的端部做成圆弧形,使行走机构与地面相接触时更顺畅。所述实心轴22由铝合金制成。
下面介绍一种运动方式,如图4所示,行走机构的初始位置为图中实线位置所示,四个行走机构2通过第一电机4驱动空心轴21转动从而带动第一支撑臂23沿逆时针方向转动至图示位置,第二电机5不转动从而第二支撑臂24保持不动,因此着地点6向后侧的斜下方运动,因此给了机架一个向前向上的驱动力,如图5所示,接着第一电机4顺时针转动从而带动第一支撑臂23沿顺时针方向转动至图示位置,第二电机5逆时针转动从而带动第二支撑臂24沿逆时针方向转动至图示位置,着地点6向前侧的斜上方运动,着地点6离地,使机架腾空离地,如图6所示,然后第一电机4逆时针转动从而带动第一支撑臂23沿逆时针方向转动至图示位置,第二电机5顺时针转动从而带动第二支撑臂24沿顺时针方向转动至图示位置,着地点6向前向斜下方运动,着地点与地面接触,完成一个运动周期,这个步骤能使机器人跳跃前进。其他类似行走,跑步的步骤在此不再赘述。
由4个支撑臂组成的四边形的行走机构,只要通过电机控制了第一支撑臂和第二支撑臂的位置,那着地点的位置即是确定的,因此可实现准确的运动。
如图7所示,行走机构2还可以通过将第一电机4顺时针转动,第二电机5逆时针转动,来使着地点6上移,将上移后6的着地点作为运动的起始点,这样就可以实现机架1的离地高度调节了。
如图1和图8所示,所述机架1上端的四角各设有一旋翼装置7,所述旋翼装置7包括设于机架1上的第三电机71、与第三电机71相连的旋翼72以及设于旋翼72周圈的滑环73,所述滑环73与旋翼72之间具有间隙,滑环73用于保护旋翼72不受损坏,所述第三电机71驱动旋翼72转动从而产生升力使机架1升空,所述滑环73上设有多个滑轮组,至少是图8中所示的2组,为了提高稳定性也可以是3组以上,机架1也可以并不是图上所示的中空框架结构,可以是一个板型结构,因此可以在机架1的上端面布置更多的滑轮组,所述滑轮组包括两个对应设置的滑轮74,所述滑轮74上设有环形槽741,所述滑轮组的其中一滑轮的环形槽与滑环73的内径形成滚动摩擦,另一滑轮的环形槽与滑环73的外径形成滚动摩擦,所述滑轮74通过轴承连接于竖轴75上,所述竖轴75设于机架1上。所述滑轮组的滑轮74在同一平面上。滑环73的设置即可以使机架在地面运动时起导正作用,防止直接碰撞墙壁,在接触墙壁时,滑环可滚动,另外也可以起到保护旋翼的作用。
本发明的市政道路用可飞行机器人可以在机架上加载多种工具,例如洒水装置,道路清洁装置等,用途广泛。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
市政道路用可飞行机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0