









专利摘要
本发明涉及一种锂离子电池多层摆放机器人,包括抽屉式框体装置和转动式框体装置,所述的抽屉式框体装置的上端安装有转动式框体装置。本发明可以解决现有锂离子电池运输时需要人员将其摆放进框后运输,人员将电池放进框内时可能与框体发生强烈碰撞从而引起爆炸事件,现有收集框底部的电池不易拿取,需要将上方电池拿取后才能拿到,拿取不方便,所耗时间长、劳动强度大和效率低等难题,可以实现对锂离子电池进行收集摆放与缓冲保护的功能,对输送中的电池进行缓冲保护,多层式摆放电池,节省空间,下端电池采取抽拉的方式进行拿取,拿取方便,耗费时间短,且具有操作简单、劳动强度小与工作效率高等优点。
权利要求
1.一种锂离子电池多层摆放机器人,包括抽屉式框体装置(1)和转动式框体装置(2),其特征在于:所述的抽屉式框体装置(1)的上端安装有转动式框体装置(2);
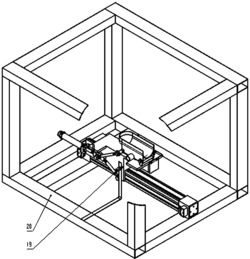
所述的抽屉式框体装置(1)包括下框(11)、两个连板(12)、连气缸(13)、L型挡板(14)、滑块(16)、辅滑槽(17)、电池装载机构(15)和支撑机构(18),下框(11)的前后两端设置有两个开口槽,下框(11)的中部安装有两个连板(12),连板(12)上安装有连气缸(13),连气缸(13)的顶端通过法兰安装在L型挡板(14)上,L型挡板(14)的下端对称安装有滑块(16),滑块(16)通过滑动配合的方式与辅滑槽(17)相连,辅滑槽(17)安装在下框(11)的底部,L型挡板(14)上均匀安装有电池装载机构(15),L型挡板(14)的左端上侧均匀安装有支撑机构(18);
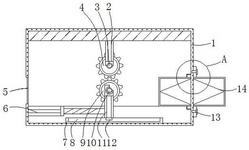
所述的电池装载机构(15)包括装载框(151)、主气缸(152)、圆板(153)、弹簧(154)、缓冲板(155)、两个滑动柱(156)、限位柱(157)、两个卡气缸(158)和两个卡块(159),装载框(151)安装在L型挡板(14)上,装载框(151)的底部对称安装有主气缸(152),主气缸(152)的顶端安装在圆板(153)上,且圆板(153)的中部设置有限位槽,圆板(153)上均匀安装有弹簧(154),弹簧(154)的上端安装在缓冲板(155)上,缓冲板(155)下端的前后两侧安装有两个滑动柱(156),滑动柱(156)通过滑动配合的方式与圆板(153)相连,缓冲板(155)下端中部安装有限位柱(157),限位柱(157)位于限位槽内,圆板(153)的前后两端安装有两个卡气缸(158),卡气缸(158)的顶端安装在卡块(159)上;
所述的装载框(151)下端为圆柱形结构,装载框(151)的上端为从下往上逐渐向外扩张的喇叭口结构;
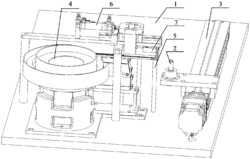
所述的转动式框体装置(2)包括上框(21)、圆轴(22)、主动齿轮(23)、从动齿轮(24)、主电机(25)、电池安放机构(26)和转动块(27),上框(21)的右端下侧固定安装有圆轴(22),圆轴(22)通过轴承安装在转动块(27)上,转动块(27)安装在下框(11)的侧壁上,圆轴(22)上安装有从动齿轮(24),从动齿轮(24)上啮合有主动齿轮(23),主动齿轮(23)安装在主电机(25)的输出轴上,主电机(25)通过底座安装在转动块(27)的侧壁上,上框(21)上均匀安装有电池安放机构(26)。
2.根据权利要求1所述的一种锂离子电池多层摆放机器人,其特征在于:所述的支撑机构(18)包括U型架(181)和支撑滚轮(182),U型架(181)的内壁之间通过轴承安装有支撑滚轮(182)。
3.根据权利要求1所述的一种锂离子电池多层摆放机器人,其特征在于:所述的电池安放机构(26)包括安放框(261)、升降气缸(262)、底板(269)、伸缩杆(263)、护板(264)、两个连架(265)、顶气缸(266)、顶板(267)和两个调节支链(268),安放框(261)安装在上框(21)内,安放框(261)的前后两端对称设置有顶槽,安放框(261)的左右两端对称设置有调节槽,安放框(261)的底部对称安装有升降气缸(262),升降气缸(262)的顶端安装在底板(269)上,底板(269)上均匀安装有伸缩杆(263),伸缩杆(263)的顶端安装在护板(264)上,安放框(261)的前后两端安装有两个连架(265),连架(265)上对称安装有顶气缸(266),顶气缸(266)的顶端安装在顶板(267)上,且顶板(267)位于顶槽内,安放框(261)的左右两端安装有两个调节支链(268)。
4.根据权利要求3所述的一种锂离子电池多层摆放机器人,其特征在于:所述的两个调节支链(268)包括横板(2681)、调节气缸(2682)和调节板(2683),横板(2681)安装在安放框(261)的外壁上,调节槽的下端通过铰链安装有调节板(2683),调节板(2683)与横板(2681)之间通过销轴安装有调节气缸(2682)。
5.根据权利要求1所述的一种锂离子电池多层摆放机器人,其特征在于:所述的限位柱(157)上均匀设置有三角卡板,且三角卡板与卡块(159)相对应。
说明书
技术领域
本发明涉及锂离子电池运输领域,特别涉及一种锂离子电池多层摆放机器人。
背景技术
锂离子电池:(是一种二次电池充电电池),它主要依靠锂离子在正极和负极之间移动来工作。锂离子电池可快速充放电、充电效率高达100%,而且输出功率大,使用寿命长。由于锂是一种特别容易发生化学反应的金属,锂离子电池运输过程中,操作不当时,容易发生爆炸事件,本发明针对圆柱形锂离子电池,现有锂离子电池运输时需要人员将其摆放进框后运输,人员将电池放进框内时可能与框体发生强烈碰撞从而引起爆炸事件,现有收集框底部的电池不易拿取,需要将上方电池拿取后才能拿到,拿取不方便,所耗时间长、劳动强度大与效率低。
发明内容
为了解决上述问题,本发明提供了一种锂离子电池多层摆放机器人,可以解决现有锂离子电池运输时需要人员将其摆放进框后运输,人员将电池放进框内时可能与框体发生强烈碰撞从而引起爆炸事件,现有收集框底部的电池不易拿取,需要将上方电池拿取后才能拿到,拿取不方便,所耗时间长、劳动强度大和效率低等难题,可以实现对锂离子电池进行收集摆放与缓冲保护的功能,对输送中的电池进行缓冲保护,多层式摆放电池,节省空间,下端电池采取抽拉的方式进行拿取,拿取方便,耗费时间短,且具有操作简单、劳动强度小与工作效率高等优点。
为了实现上述目的,本发明采用以下技术方案:一种锂离子电池多层摆放机器人,包括抽屉式框体装置和转动式框体装置,所述的抽屉式框体装置的上端安装有转动式框体装置。
所述的抽屉式框体装置包括下框、两个连板、连气缸、L型挡板、滑块、辅滑槽、电池装载机构和支撑机构,下框的前后两端设置有两个开口槽,下框的中部安装有两个连板,连板上安装有连气缸,连气缸的顶端通过法兰安装在L型挡板上,L型挡板的下端对称安装有滑块,滑块通过滑动配合的方式与辅滑槽相连,辅滑槽安装在下框的底部,L型挡板上均匀安装有电池装载机构,L型挡板的左端上侧均匀安装有支撑机构,电池装载机构对锂离子电池进行装载,支撑机构对转动式框体装置进行支撑与滑动,当抽屉式框体装置内的锂离子电池需要拿取时,连气缸带动L型挡板抽,电池装载机构从开口槽内抽出,电池装载机构对锂离子电池进行收集与缓冲保护,采用抽拉的方式对电池进行拿取,拿取方便,多层式摆放电池,节省空间,操作简单,耗费短,提高了工作效率。
所述的电池装载机构包括装载框、主气缸、圆板、弹簧、缓冲板、两个滑动柱、限位柱、两个卡气缸和两个卡块,装载框安装在L型挡板上,装载框的底部对称安装有主气缸,主气缸的顶端安装在圆板上,且圆板的中部设置有限位槽,圆板上均匀安装有弹簧,弹簧的上端安装在缓冲板上,缓冲板下端的前后两侧安装有两个滑动柱,滑动柱通过滑动配合的方式与圆板相连,缓冲板下端中部安装有限位柱,限位柱位于限位槽内,圆板的前后两端安装有两个卡气缸,卡气缸的顶端安装在卡块上,具体工作时,电池装载机构对输送来的锂离子电池进行限位安放,装有弹簧的缓冲板对落下的电池起到缓冲的作用,当电池装载机构需要拿取时,两个卡气缸带动两个卡块对限位柱进行卡紧限位,主气缸带动电池上升,电池装载机构对锂离子电池进行收集与缓冲保护,操作简单,耗费短,提高了工作效率。
所述的装载框下端为圆柱形结构,装载框的上端为从下往上逐渐向外扩张的喇叭口结构,确保电池能够进入到装载框内。
所述的转动式框体装置包括上框、圆轴、主动齿轮、从动齿轮、主电机、电池安放机构和转动块,上框的右端下侧固定安装有圆轴,圆轴通过轴承安装在转动块上,转动块安装在下框的侧壁上,圆轴上安装有从动齿轮,从动齿轮上啮合有主动齿轮,主动齿轮安装在主电机的输出轴上,主电机通过底座安装在转动块的侧壁上,上框上均匀安装有电池安放机构,电池安放机构对锂离子电池进行装载,当需要将锂离子电池进行放置到抽屉式框体装置时,主电机带动主动齿轮转动,主动齿轮带动上框转动直到上框远离抽屉式框体装置的上方,电池安放机构对锂离子电池进行收集与缓冲保护,转动式框体装置自动化转动确保电池能够放入到抽屉式框体装置内,操作简单,耗费短,减小了劳动强度,提高了工作效率。
作为本发明的一种优选技术方案,所述的限位柱上均匀设置有三角卡板,且三角卡板与卡块相对应,三角卡板与卡块相卡紧时更加紧凑。
作为本发明的一种优选技术方案,所述的支撑机构包括U型架和支撑滚轮,U型架的内壁之间通过轴承安装有支撑滚轮,具体工作时,支撑机构对转动式框体装置进行支撑与滑动,提高了工作效率。
作为本发明的一种优选技术方案,所述的电池安放机构包括安放框、升降气缸、底板、伸缩杆、护板、两个连架、顶气缸、顶板和两个调节支链,安放框安装在上框内,安放框的前后两端对称设置有顶槽,安放框的左右两端对称设置有调节槽,安放框的底部对称安装有升降气缸,升降气缸的顶端安装在底板上,底板上均匀安装有伸缩杆,伸缩杆的顶端安装在护板上,安放框的前后两端安装有两个连架,连架上对称安装有顶气缸,顶气缸的顶端安装在顶板上,且顶板位于顶槽内,安放框的左右两端安装有两个调节支链,具体工作时,电池安放机构对输送来的电池进行限位安放,伸缩杆对落下的电池起到缓冲的效果,顶气缸带动两个连架抵住电池的两端,当电池需要拿取时,升降气缸带动电池上升,两个调节支链自行调节,电池安放机构对锂离子电池进行收集与缓冲保护,操作简单,耗费短,减小了劳动强度,提高了工作效率。
作为本发明的一种优选技术方案,所述的两个调节支链包括横板、调节气缸和调节板,横板安装在安放框的外壁上,调节槽的下端通过铰链安装有调节板,调节板与横板之间通过销轴安装有调节气缸,具体工作时,当电池需要拿取时,调节气缸带动调节板下拉,方便电池拿取。
工作时,首先,人员将锂离子电池放入本发明内,第二步,抽屉式框体装置开始工作,电池装载机构对锂离子电池进行装载,支撑机构对转动式框体装置进行支撑与滑动,当抽屉式框体装置内的锂离子电池需要拿取时,连气缸带动L型挡板抽,电池装载机构从开口槽内抽出,之后,电池装载机构开始工作,电池装载机构对输送来的锂离子电池进行限位安放,装有弹簧的缓冲板对落下的电池起到缓冲的作用,当电池装载机构需要拿取时,两个卡气缸带动两个卡块对限位柱进行卡紧限位,主气缸带动电池上升,之后,支撑机构开始工作,支撑机构对转动式框体装置进行支撑与滑动,第三步,转动式框体装置开始工作,电池安放机构对锂离子电池进行装载,当需要将锂离子电池进行放置到抽屉式框体装置时,主电机带动主动齿轮转动,主动齿轮带动上框转动直到上框远离抽屉式框体装置的上方,之后,电池安放机构开始工作,电池安放机构对输送来的电池进行限位安放,伸缩杆对落下的电池起到缓冲的效果,顶气缸带动两个连架抵住电池的两端,当电池需要拿取时,升降气缸带动电池上升,两个调节支链自行调节,可以实现对锂离子电池进行收集摆放与缓冲保护的功能。
本发明的有益效果在于:
1、本发明可以解决现有锂离子电池运输时需要人员将其摆放进框后运输,人员将电池放进框内时可能与框体发生强烈碰撞从而引起爆炸事件,现有收集框底部的电池不易拿取,需要将上方电池拿取后才能拿到,拿取不方便,所耗时间长、劳动强度大和效率低等难题,可以实现对锂离子电池进行收集摆放与缓冲保护的功能,对输送中的电池进行缓冲保护,多层式摆放电池,节省空间,下端电池采取抽拉的方式进行拿取,拿取方便,耗费时间短,且具有操作简单、劳动强度小与工作效率高等优点;
2、本发明设置有抽屉式框体装置,电池装载机构对锂离子电池进行收集与缓冲保护,采用抽拉的方式对电池进行拿取,拿取方便,多层式摆放电池,节省空间,操作简单,耗费短,提高了工作效率;
3、本发明设置有转动式框体装置,电池安放机构对锂离子电池进行收集与缓冲保护,转动式框体装置自动化转动确保电池能够放入到抽屉式框体装置内,操作简单,耗费短,减小了劳动强度,提高了工作效率。
附图说明
下面结合附图和实施例对本发明进一步说明。
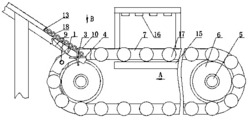
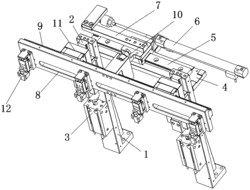
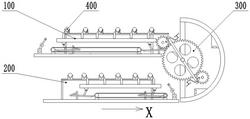
图1是本发明的结构示意图;
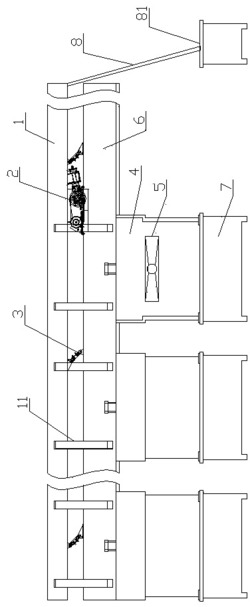
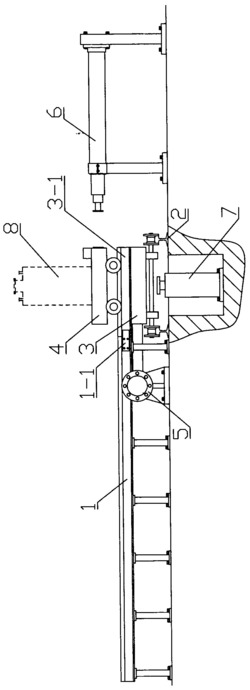
图2是本发明抽屉式框体装置的结构示意图;
图3是本发明L型挡板与电池装载机构之间的结构示意图;
图4是本发明图3的剖视图;
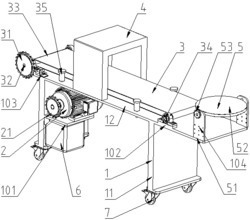
图5是本发明转动式框体装置的结构示意图;
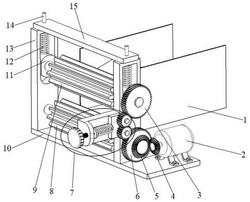
图6是本发明上框与电池安放机构之间的结构示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互结合。
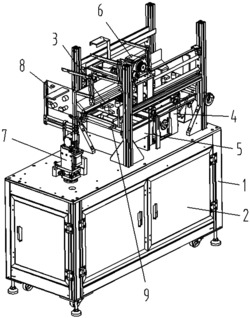
如图1至图6所示,一种锂离子电池多层摆放机器人,包括抽屉式框体装置1和转动式框体装置2,所述的抽屉式框体装置1的上端安装有转动式框体装置2。
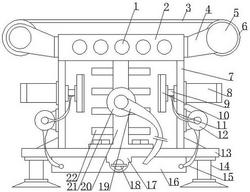
所述的抽屉式框体装置1包括下框11、两个连板12、连气缸13、L型挡板14、滑块16、辅滑槽17、电池装载机构15和支撑机构18,下框11的前后两端设置有两个开口槽,下框11的中部安装有两个连板12,连板12上安装有连气缸13,连气缸13的顶端通过法兰安装在L型挡板14上,L型挡板14的下端对称安装有滑块16,滑块16通过滑动配合的方式与辅滑槽17相连,辅滑槽17安装在下框11的底部,L型挡板14上均匀安装有电池装载机构15,L型挡板14的左端上侧均匀安装有支撑机构18,电池装载机构15对锂离子电池进行装载,支撑机构18对转动式框体装置2进行支撑与滑动,当抽屉式框体装置1内的锂离子电池需要拿取时,连气缸13带动L型挡板14抽,电池装载机构15从开口槽内抽出,电池装载机构15对锂离子电池进行收集与缓冲保护,采用抽拉的方式对电池进行拿取,拿取方便,多层式摆放电池,节省空间,操作简单,耗费短,提高了工作效率。
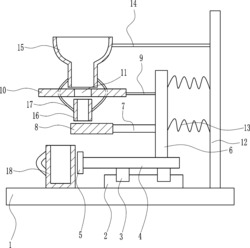
所述的电池装载机构15包括装载框151、主气缸152、圆板153、弹簧154、缓冲板155、两个滑动柱156、限位柱157、两个卡气缸158和两个卡块159,装载框151安装在L型挡板14上,装载框151的底部对称安装有主气缸152,主气缸152的顶端安装在圆板153上,且圆板153的中部设置有限位槽,圆板153上均匀安装有弹簧154,弹簧154的上端安装在缓冲板155上,缓冲板155下端的前后两侧安装有两个滑动柱156,滑动柱156通过滑动配合的方式与圆板153相连,缓冲板155下端中部安装有限位柱157,限位柱157位于限位槽内,圆板153的前后两端安装有两个卡气缸158,卡气缸158的顶端安装在卡块159上,具体工作时,电池装载机构15对输送来的锂离子电池进行限位安放,装有弹簧154的缓冲板155对落下的电池起到缓冲的作用,当电池装载机构15需要拿取时,两个卡气缸158带动两个卡块159对限位柱157进行卡紧限位,主气缸152带动电池上升,电池装载机构15对锂离子电池进行收集与缓冲保护,操作简单,耗费短,提高了工作效率。
所述的装载框151下端为圆柱形结构,装载框151的上端为从下往上逐渐向外扩张的喇叭口结构,确保电池能够进入到装载框151内。
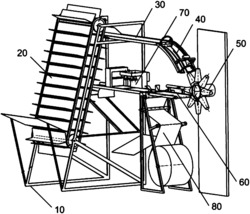
所述的转动式框体装置2包括上框21、圆轴22、主动齿轮23、从动齿轮24、主电机25、电池安放机构26和转动块27,上框21的右端下侧固定安装有圆轴22,圆轴22通过轴承安装在转动块27上,转动块27安装在下框11的侧壁上,圆轴22上安装有从动齿轮24,从动齿轮24上啮合有主动齿轮23,主动齿轮23安装在主电机25的输出轴上,主电机25通过底座安装在转动块27的侧壁上,上框21上均匀安装有电池安放机构26,电池安放机构26对锂离子电池进行装载,当需要将锂离子电池进行放置到抽屉式框体装置1时,主电机25带动主动齿轮23转动,主动齿轮23带动上框21转动直到上框21远离抽屉式框体装置1的上方,电池安放机构26对锂离子电池进行收集与缓冲保护,转动式框体装置2自动化转动确保电池能够放入到抽屉式框体装置1内,操作简单,耗费短,减小了劳动强度,提高了工作效率。
所述的限位柱157上均匀设置有三角卡板,且三角卡板与卡块159相对应,三角卡板与卡块159相卡紧时更加紧凑。
所述的支撑机构18包括U型架181和支撑滚轮182,U型架181的内壁之间通过轴承安装有支撑滚轮182,具体工作时,支撑机构18对转动式框体装置2进行支撑与滑动,提高了工作效率。
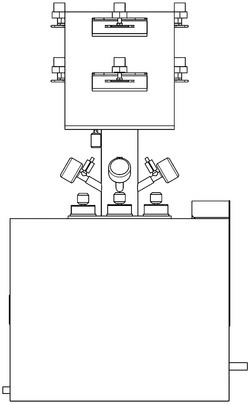
所述的电池安放机构26包括安放框261、升降气缸262、底板269、伸缩杆263、护板264、两个连架265、顶气缸266、顶板267和两个调节支链268,安放框261安装在上框21内,安放框261的前后两端对称设置有顶槽,安放框261的左右两端对称设置有调节槽,安放框261的底部对称安装有升降气缸262,升降气缸262的顶端安装在底板269上,底板269上均匀安装有伸缩杆263,伸缩杆263的顶端安装在护板264上,安放框261的前后两端安装有两个连架265,连架265上对称安装有顶气缸266,顶气缸266的顶端安装在顶板267上,且顶板267位于顶槽内,安放框261的左右两端安装有两个调节支链268,具体工作时,电池安放机构26对输送来的电池进行限位安放,伸缩杆263对落下的电池起到缓冲的效果,顶气缸266带动两个连架265抵住电池的两端,当电池需要拿取时,升降气缸262带动电池上升,两个调节支链268自行调节,电池安放机构26对锂离子电池进行收集与缓冲保护,操作简单,耗费短,减小了劳动强度,提高了工作效率。
所述的两个调节支链268包括横板2681、调节气缸2682和调节板2683,横板2681安装在安放框261的外壁上,调节槽的下端通过铰链安装有调节板2683,调节板2683与横板2681之间通过销轴安装有调节气缸2682,具体工作时,当电池需要拿取时,调节气缸2682带动调节板2683下拉,方便电池拿取。
工作时,首先,人员将锂离子电池放入本发明内,第二步,抽屉式框体装置1开始工作,电池装载机构15对锂离子电池进行装载,支撑机构18对转动式框体装置2进行支撑与滑动,当抽屉式框体装置1内的锂离子电池需要拿取时,连气缸13带动L型挡板14抽,电池装载机构15从开口槽内抽出,之后,电池装载机构15开始工作,电池装载机构15对输送来的锂离子电池进行限位安放,装有弹簧154的缓冲板155对落下的电池起到缓冲的作用,当电池装载机构15需要拿取时,两个卡气缸158带动两个卡块159对限位柱157进行卡紧限位,主气缸152带动电池上升,之后,支撑机构18开始工作,支撑机构18对转动式框体装置2进行支撑与滑动,第三步,转动式框体装置2开始工作,电池安放机构26对锂离子电池进行装载,当需要将锂离子电池进行放置到抽屉式框体装置1时,主电机25带动主动齿轮23转动,主动齿轮23带动上框21转动直到上框21远离抽屉式框体装置1的上方,之后,电池安放机构26开始工作,电池安放机构26对输送来的电池进行限位安放,伸缩杆263对落下的电池起到缓冲的效果,顶气缸266带动两个连架265抵住电池的两端,当电池需要拿取时,升降气缸262带动电池上升,两个调节支链268自行调节,实现了对锂离子电池进行收集摆放与缓冲保护的功能,解决了现有锂离子电池运输时需要人员将其摆放进框后运输,人员将电池放进框内时可能与框体发生强烈碰撞从而引起爆炸事件,现有收集框底部的电池不易拿取,需要将上方电池拿取后才能拿到,拿取不方便,所耗时间长、劳动强度大和效率低等难题,达到了目的。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
锂离子电池多层摆放机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0