








专利摘要
本发明涉及树枝修剪领域,具体涉及一种用于树枝修剪的直升式攀爬剃刀,包括锁紧机构、切割机构、推进机构和支撑机构,支撑机构竖直设置,锁紧机构位于支撑机构下端,锁紧机构水平设置,锁紧机构与支撑机构转动连接,切割机构水平设置,切割机构包括第一刀片、第二刀片、第三刀片、第四刀片和第五刀片,锁紧机构包括第一气缸、第二气缸、第一夹臂、第二夹臂、第一固定轮、第二固定轮、第一限位杆和第二限位杆,本发明的一种用于树木修剪的直升式攀爬剃刀,能快速安装到树木上,并对不同高度的树木进行修剪,能在树木上攀爬,对树木进行全面的修剪,便于携带工作,提高机械效率,简化工作步骤,减轻工人的工作负担,安全高效工作。
权利要求
1.一种用于树枝修剪的直升式攀爬剃刀,其特征在于:包括锁紧机构(1)、切割机构(2)、推进机构(3)和支撑机构(4),支撑机构(4)竖直设置,锁紧机构位于支撑机构(4)下端,锁紧机构(1)水平设置,锁紧机构(1)与支撑机构(4)转动连接,切割机构(2)水平设置,切割机构(2)位于支撑机构(4)侧壁上,切割机构(2)位于锁紧机构(1)上方,切割机构(2)与支撑机构(4)连接,推进机构(3)竖直设置,推进机构(3)位于支撑机构(4)内,推进机构(3)与支撑机构(4)进行连接,切割机构(2)包括第一刀片(2a)、第二刀片(2b)、第三刀片(2c)、第四刀片(2d)和第五刀片(2e),第一刀片(2a)水平设置,第一刀片(2a)与支撑机构(4)顶部固定连接,第二刀片(2b)和第三刀片(2c)对称设置在支撑机构(4)侧壁上,第四刀片(2d)和第五刀片(2e)对称设置在支撑机构(4)侧壁上,第四刀片(2d)和第五刀片(2e)位于第二刀片(2b)和第三刀片(2c)下方,第一刀片(2a)位于第二刀片(2b)与第三刀片(2c)上方,锁紧机构(1)包括第一气缸(1a)、第二气缸(1b)、第一夹臂(1c)、第二夹臂(1d)、第一固定轮(1e)、第二固定轮(1f)、第一限位杆(1g)和第二限位杆(1h),第一气缸(1a)和第二气缸(1b)对称设置在支撑机构(4)两侧,第一气缸(1a)输出轴与第一夹臂(1c)一端连接,第二气缸(1b)输出轴与第二夹臂(1d)一端连接,第一固定轮(1e)与第一夹臂(1c)远离第一气缸(1a)的一端转动连接,第二固定轮(1f)与第二夹臂(1d)远离第二气缸(1b)的一端转动连接,第一限位杆(1g)位于第二限位杆(1h)上方;
所述推进机构(3)包括第一电机(3a)、第二电机(3b)、第一皮带(3c)、第二皮带(3d)和四个限位轮(3e),第一电机(3a)和第二电机(3b)均水平设置,第一电机(3a)和第二电机(3b)固定在支撑机构(4)内,两个限位轮(3e)与第一电机(3a)两端的输出轴连接,两个限位轮(3e)与第二电机(3b)两端的输出轴连接,第一皮带(3c)和第二皮带(3d)均竖直设置,第一皮带(3c)分别与第一电机(3a)和第二电机(3b)同一侧上的限位轮(3e)连接,第二皮带(3d)分别与第一电机(3a)和第二电机(3b)远离第一皮带(3c)一侧上的限位轮(3e)连接。
2.根据权利要求1所述的一种用于树枝修剪的直升式攀爬剃刀,其特征在于:所述支撑机构(4)包括顶板(4a)、机体(4b)、第一延伸臂(4c)、第二延伸臂(4d)、第一扶手(4e)和第二扶手(4f),机体(4b)竖直设置,顶板(4a)与机体(4b)顶部连接,第一延伸臂(4c)和第二延伸臂(4d)水平设置,第一延伸臂(4c)和第二延伸臂(4d)对称设置在机体(4b)侧壁上,第一延伸臂(4c)和第二延伸臂(4d)与机体(4b)侧壁固定连接,第一扶手(4e)和第二扶手(4f)水平设置,第一扶手(4e)位于第一延伸臂(4c)外侧壁上,第一扶手(4e)与第一延伸臂(4c)固定连接,第二扶手(4f)位于第二延伸臂(4d)外侧壁上,第二扶手(4f)与第二延伸臂(4d)固定连接。
3.根据权利要求2所述的一种用于树枝修剪的直升式攀爬剃刀,其特征在于:所述顶板(4a)上设置于控制器(4a1),控制器(4a1)与顶板(4a)固定连接,第一电机(3a)、第二电机(3b)、第三电机(4b2)和第四电机(4b3)均与控制器(4a1)电连接。
4.根据权利要求3所述的一种用于树枝修剪的直升式攀爬剃刀,其特征在于:所述机体(4b)上设置有四个通口(4b1),四个通口(4b1)贯穿机体(4b)侧壁,两个通口(4b1)在上方与第一皮带(3c)和第二皮带(3d)上端接触,两个通口(4b1)在下方与第一皮带(3c)和第二皮带(3d)下端连接。
5.根据权利要求4所述的一种用于树枝修剪的直升式攀爬剃刀,其特征在于:所述第一皮带(3c)设置有若干第一抓力条(3c1),第二皮带(3d)上设置有若干第二抓力条(3d1),第一抓力条(3c1)沿第一皮带(3c)宽度方向,若干第一抓力条(3c1)沿第一皮带(3c)长度方向,第二抓力条(3d1)沿第二皮带(3d)宽度方向,若干第二抓力条(3d1)沿第二皮带(3d)长度方向。
6.根据权利要求5所述的一种用于树枝修剪的直升式攀爬剃刀,其特征在于:所述机体(4b)上设置有第三电机(4b2)、第四电机(4b3)、第一齿轮(4b4)、第二齿轮(4b5)、第三齿轮(4b6)和第四齿轮(4b7),第三电机(4b2)和第四电机(4b3)竖直设置,第三电机(4b2)和第四电机(4b3)输出轴均竖直向下,第三电机(4b2)输出轴与第一齿轮(4b4)连接,第四电机(4b3)输出轴与第二齿轮(4b5)连接,第三齿轮(4b6)与第二刀片(2b)固定连接,第四齿轮(4b7)与第三刀片(2c)固定连接,第一齿轮(4b4)、第二齿轮(4b5)、第三齿轮(4b6)和第四齿轮(4b7)均与机体(4b)转动连接,第一齿轮(4b4)与第三齿轮(4b6)啮合,第二齿轮(4b5)与第四齿轮(4b7)啮合。
7.根据权利要求6所述的一种用于树枝修剪的直升式攀爬剃刀,其特征在于:所述第一固定轮(1e)上设置有第一挡条(1e1),第二固定轮(1f)上设置有第二挡条(1f1),第一挡条(1e1)一端与第一延伸臂(4c)连接,第一挡条(1e1)远离第一延伸臂(4c)的一端与第一限位杆(1g)连接,第二挡条(1f1)一端与第二延伸臂(4d)连接,第二挡条(1f1)远离第二延伸臂(4d)的一端与第二限位杆(1h)连接。
8.根据权利要求7所述的一种用于树枝修剪的直升式攀爬剃刀,其特征在于:所述第一固定轮(1e)设置有若干第一防滑条(1e2),第二固定轮(1f)上设置有若干第二防滑条(1f2),若干第一防滑条(1e2)呈一定角度与第一固定轮(1e)连接,若干第二防滑条(1f2)呈一定角度与第二固定轮(1f)连接,若干第一防滑条(1e2)沿第一固定轮(1e)长度方向呈两排均匀分布,若干第二防滑条(1f2)沿第二固定轮(1f)长度方向呈两排均匀分布。
说明书
技术领域
本发明涉及树枝修剪领域,具体涉及一种用于树枝修剪的直升式攀爬剃刀。
背景技术
修剪是展现树木景观特色,使其保持良好生长状态的重要手段,树木可在休眠期和生长期进行修剪,休眠期修剪以整形为主,生长期修剪以调整树势为主,但强修剪必须在休眠期进行,每年2月初至4月初,是乔木修剪的最佳季节,剪除徒长枝、树身的萌蘖枝、并生枝、下垂枝、病虫枝、交叉枝、扭伤枝、枯枝、烂头等,并对树冠适当整形保持形状,有伤流的树种应在夏、秋两季修剪,造型树的修剪,原则上,视树木生长势而定,通常应每两个月修剪一次外形,以保持形状,保持全冠的前提下适度疏枝,修剪时应去除所有损伤枝、断枝、枯枝,并适当剪摘部分叶片,对由于受意外伤害折断而枯黄的枝叶应及时清剪,修剪整形应达到均衡树势、完整枝冠和促进生长的要求,修剪工不得擅自改变原植株的造型,不得擅自截剪直径4厘米以上的枝条,剪口应平整,做到不劈不裂,不留残桩,对需要去除的枝条直径大于2.5厘米的,应在修剪后及时涂上愈伤膏,防止伤口腐烂。剪下的枝叶应及时清除运走,乔木修剪后树冠完整美观,主侧枝分布均匀、数量适宜,内膛不乱,通风透光较好,没有3厘米以上的枯枝、折断枝、修剪后的废留枝,主干明显的树种,修剪时应注意保护中央领导枝,使其向上直立生长,原中央领导枝受损、折断的,应利用顶端侧枝重新培养新的领导枝,针叶类乔木宜疏剪,不宜短截主干或重剪侧枝,但应及时剪除影响游览或公共安全的下部枝条,阔叶类乔木树干上的不定芽及根蘖枝应及时清除,同时应避免拉伤树皮或对树木的主根造成伤害,成形的阔叶类乔木,应以疏剪过密枝、短截过长枝为主,保持其自然形树型和观赏特性,造型乔木应按照设计要求及时进行修剪,棕榈科植物老化枝叶枯黄面积达2/3时需剪除,其叶壳在底部开裂达1/3以上时应剥除,修剪时应严格保护主干顶芽不受损伤。
现有许多类型的树枝修剪设备,在对树枝修剪时,需要工人手动操作设备对树木进行修剪,人工修剪消耗大量人力,工人在修建时,可能会出现危险,被树枝砸伤,机器使用受伤,工人只能在较低的地方进行修剪,对高处树枝进行修剪需要使用梯子和其他攀爬设备,造成修剪难度加大,修剪高枝工作效率低下,需要很长的工期,不能再规定期间内完成工作任务,造成不必要的损失,一些机械式的修剪仪器,在使用时对树木进行修剪,节约了许多时间,但设备较重,需要多人同时对设备进行操作,工作步骤较复杂,长时间是修剪会造成工人身体疲劳,影响工作效率,因此有必要设计一种能够快速修剪树枝,能固定在树木主干上,在树木上进行攀爬修剪树枝,对不同高度树木进行修剪,携带方便,操作安全的树枝修剪的直升式攀爬剃刀。
发明内容
本发明的目的在于提供一种用于树枝修剪的直升式攀爬剃刀。
为达此目的,本发明采用以下技术方案:
提供一种用于树枝修剪的直升式攀爬剃刀,包括锁紧机构、切割机构、推进机构和支撑机构,支撑机构竖直设置,锁紧装置位于支撑机构下端,锁紧机构水平设置,锁紧机构与支撑机构转动连接,切割机构水平设置,切割机构位于支撑机构侧壁上,切割机构位于锁紧机构上方,切割机构与支撑机构转动连接,推进机构竖直设置,推进机构位于支撑机构内,推进机构与支撑机构进行连接,切割机构包括第一刀片、第二刀片、第三刀片、第四刀片和第五刀片,第一刀片水平设置,第一刀片与支撑机构顶部固定连接,第二刀片和第三刀片对称设置在支撑机构侧壁上,第四刀片和第五刀片对称设置在支撑机构侧壁上,第四刀片和第五刀片位于第二刀片和第三刀片下方,第一刀片位于第二刀片与第三刀片上方,锁紧机构包括第一气缸、第二气缸、第一夹臂、第二夹臂、第一固定轮、第二固定轮、第一限位杆和第二限位杆,第一气缸和第二气缸对称设置在支撑机构两侧,第一气缸输出轴与第一夹臂一端连接,第二气缸输出轴与第二夹臂一端连接,第一固定轮与第一夹臂远离第一气缸的一端转动连接,第二固定轮与第二夹臂远离第二气缸的一端转动连接,第一限位杆一端与第一固定轮远离第一夹臂的一面连接,第二限位杆一端与第二固定轮远离第二夹臂的一面连接,第一限位杆位于第二限位杆上方。
作为一种用于树枝修剪的直升式攀爬剃刀的一种优选方案,所述推进机构包括第一电机、第二电机、第一皮带、第二皮带和四个限位轮,第一电机和第二电机均水平设置,第一电机和第二电机固定在支撑机构内,两个限位轮与第一电机两端的输出轴连接,两个限位轮与第二电机两端的输出轴连接,第一皮带和第二皮带均竖直设置,第一皮带分别与第一电机和第二电机同一侧上的限位轮连接,第二皮带分别与第一电机和第二电机远离第一皮带一侧上的限位轮连接。
作为一种用于树枝修剪的直升式攀爬剃刀的一种优选方案,所述支撑机构包括顶板、机体、第一延伸臂、第二延伸臂、第一扶手和第二扶手,机体竖直设置,顶板与机体顶部连接,第一延伸臂和第二延伸臂水平设置,第一延伸臂和第二延伸臂对称设置在机体侧壁上,第一延伸臂和第二延伸臂与机体侧壁固定连接,第一扶手和第二扶手水平设置,第一扶手位于第一延伸臂外侧壁上,第一扶手与第一延伸臂固定连接,第二扶手位于第二延伸臂外侧壁上,第二扶手与第二延伸臂固定连接。
作为一种用于树枝修剪的直升式攀爬剃刀的一种优选方案,其特征在于:所述顶板上设置于控制器,控制器与顶板固定连接,第一电机、第二电机、第三电机和第四电机均与控制器电连接。
作为一种用于树枝修剪的直升式攀爬剃刀的一种优选方案,其特征在于:所述机体上设置有四个通口,四个通口贯穿机体侧壁,两个通口在上方与第一皮带和第二皮带上端接触,两个通口在下方与第一皮带和第二皮带下端连接。
作为一种用于树枝修剪的直升式攀爬剃刀的一种优选方案,其特征在于:所述第一皮带设置有若干第一抓力条,第二皮带上设置有若干第二抓力条,第一抓力条沿第一皮带宽度方向,若干第一抓力条沿第一皮带长度方向,第二抓力条沿第二皮带宽度方向,若干第二抓力条沿第二皮带长度方向。
作为一种用于树枝修剪的直升式攀爬剃刀的一种优选方案,其特征在于:所述机体上设置有第三电机、第四电机、第一齿轮、第二齿轮、第三齿轮和第四齿轮,第三电机和第四电机竖直设置,第三电机和第四电机输出轴均竖直向下,第三电机输出轴与第一齿轮连接,第四电机输出轴与第二齿轮连接,第三齿轮与第二刀片固定连接,第四齿轮与第三刀片固定连接,第一齿轮、第二齿轮、第三齿轮和第四齿轮均与机体转动连接,第一齿轮与第三齿轮啮合,第二齿轮与第四齿轮啮合。
作为一种用于树枝修剪的直升式攀爬剃刀的一种优选方案,所述第一延伸臂内设置有第三气缸,第二延伸臂你设置有第四气缸,第三气缸和第四气缸均竖直设置,第三气缸位于第一延伸臂远离机体的一端上,第四气缸位于第二延伸臂远离机体的一端上,第三气缸贯穿第一延伸臂,垫气缸与第一延伸臂固定连接,第四气缸贯穿第二延伸臂,第四气缸与第二延伸臂固定连接。
作为一种用于树枝修剪的直升式攀爬剃刀的一种优选方案,所述第一固定轮上设置有第一挡条,第二固定轮上设置有第二挡条,第一挡条一端与第一延伸臂连接,第一挡条远离第一延伸臂的一端与第一限位杆连接,第二挡条一端与第二延伸臂连接,第二挡条远离第二延伸臂的一端与第二限位杆连接。
作为一种用于树枝修剪的直升式攀爬剃刀的一种优选方案,所述第一固定轮设置有若干第一防滑条,第二固定轮上设置有若干第二防滑条,若干第一防滑条呈一定角度与第一固定轮连接,若干第二防滑条呈一定角度与第二固定轮连接,若干第一防滑条沿第一固定轮长度方向呈两排均匀分布,若干第二防滑条沿第二固定轮长度方向呈两排均匀分布。
本发明的有益效果:本发明的一种用于树枝修剪的直升式攀爬剃刀,在进行树木修剪时,工人手抓住第一扶手和第二扶手移动设备到需要修剪的树木下,将设备通过遥控器调节第二刀片、第三刀片、第四刀片、第五刀片、第一夹臂和第二夹臂张开,第一气缸、第二气缸、第三气缸、第四气缸、第三电机和第四电机转动,将设备与树木贴合,再命令控制器控制第一气缸、第二气缸、第三气缸、第四气缸、第三电机和第四电机转动,第二刀片、第三刀片、第四刀片、第五刀片、第一夹臂和第二夹臂夹紧与树木贴合,同时第一限位杆和第二限位杆也与树木贴合,通过遥控器命令控制器,控制器控制第一电机和第二电机转动,第一电机输出轴和第二电机输出轴带动四个限位轮转动,四个限位轮带动第一皮带和第二皮带转动,第一皮带和第二皮带转动带动第一抓力条和第二抓力条与树木贴合,第一抓力条和第二抓力条与树木之间产生摩擦力,设备向上运动,第一固定轮和第二固定轮在第一皮带和第二皮带的带动下,沿树木转动,第一固定轮和第二固定轮上的第一防滑条和第二防滑条与树木接触,加大摩擦力,设备能更好的与树木贴合,在第一电机和第二电机的转动下,能更平稳的与树木贴合,上升时由于第一抓力条、第二抓力条、第一防滑条和第二防滑条能防止设备上升的过程中出现下滑,设备能强有力的稳定上升,在上升的过程中,设备上的第二刀片、第三刀片、第四刀片、第五刀片、第一夹臂和第二夹臂能与树木稳定贴合,第一刀片、第二刀片、第三刀片、第四刀片和第五刀片均切割树枝,树枝与第一刀片、第二刀片、第三刀片、第四刀片和第五刀片上刀口接触,在第一电机和第二电机提供的推进力下,树枝从树上被切割下来,无线遥控器命令控制器,控制器控制第一电机和第二电机转动到修剪高度,然后控制器控制第一电机和第二电机向下移动,第一皮带和第二皮带上的抓力条与树木接触,第一固定轮和第二固定轮上的第一防滑条和第二防滑条也与树木接触,设备下降受到摩擦力,设备下降稳定,不会出现突然下降的问题,当设备下降到树木底部时,控制器命令第一电机和第二电机停止运作,工人抓住第一扶手和第二扶手,通过遥控器命令控制器,控制器控制第二刀片、第三刀片、第四刀片、第五刀片、第一夹臂和第二夹臂张开,工人将设备从树上取下,安装到下一棵需要修剪的树上,本发明的一种用于树木修剪的直升式攀爬剃刀,能快速安装到树木上,并对不同高度的树木进行修剪,能在树木上攀爬,对树木进行全面的修剪,便于携带工作,提高机械效率,简化工作步骤,减轻工人的工作负担,安全高效工作。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使用的附图作简单地介绍。显而易见地,下面所描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
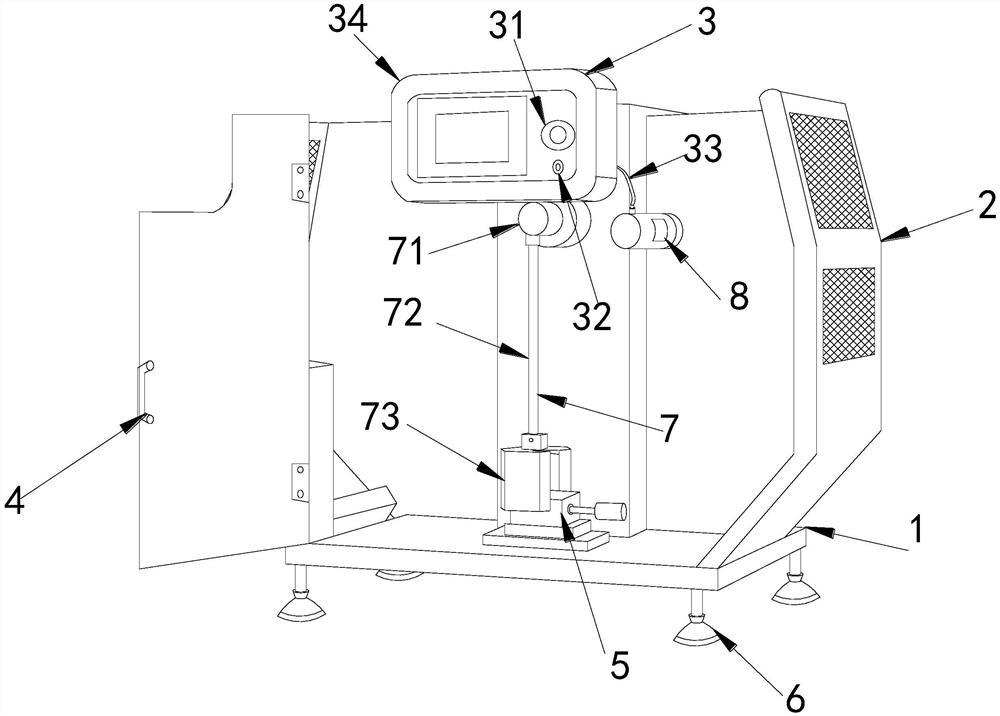
图1是本发明立体结构示意图一;
图2是本发明立体结构示意图二;
图3是本发明立体结构示意图三;
图4是本发明侧视图;
图5是本发明剖视图一;
图6是本发明剖视图二;
图7是本发明剖视图三;
图8是本发明剖视图四;
图9是本发明A处放大示意图;
图10是本发明B处放大示意图;
图中:
锁紧机构1、第一气缸1a、第二气缸1b、第一夹臂1c、第二夹臂1d、第一固定轮1e、第一挡条1e1、第一防滑条1e2、第二固定轮1f、第二挡条1f1、第二防滑条1f2、第一限位杆1g、第二限位杆1h、切割机构2、第一刀片2a、第二刀片2b、第三刀片2c、第四刀片2d、第五刀片2e、推进机构3、第一电机3a、第二电机3b、第一皮带3c、第一抓力条3c1、第二皮带3d、第二抓力条3d1、限位轮3e、支撑机构4、顶板4a、控制器4a1、机体4b、通口4b1、第三电机4b2、第四电机4b3、第一齿轮4b4、第二齿轮4b5、第三齿轮4b6、第四齿轮4b7、第一延伸臂4c、第三气缸4c1、第二延伸臂4d、第四气缸4d1、第一扶手4e、第二扶手4f。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若出现术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
在本发明的描述中,除非另有明确的规定和限定,若出现术语“连接”等指示部件之间的连接关系,该术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个部件内部的连通或两个部件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
一种用于树枝修剪的直升式攀爬剃刀,包括锁紧机构1、切割机构2、推进机构3和支撑机构4,支撑机构4竖直设置,锁紧装置位于支撑机构4下端,锁紧机构1水平设置,锁紧机构1与支撑机构4转动连接,切割机构2水平设置,切割机构2位于支撑机构4侧壁上,切割机构2位于锁紧机构1上方,切割机构2与支撑机构4转动连接,推进机构3竖直设置,推进机构3位于支撑机构4内,推进机构3与支撑机构4进行连接,切割机构2包括第一刀片2a、第二刀片2b、第三刀片2c、第四刀片2d和第五刀片2e,第一刀片2a水平设置,第一刀片2a与支撑机构4顶部固定连接,第二刀片2b和第三刀片2c对称设置在支撑机构4侧壁上,第四刀片2d和第五刀片2e对称设置在支撑机构4侧壁上,第四刀片2d和第五刀片2e位于第二刀片2b和第三刀片2c下方,第一刀片2a位于第二刀片2b与第三刀片2c上方,锁紧机构1包括第一气缸1a、第二气缸1b、第一夹臂1c、第二夹臂1d、第一固定轮1e、第二固定轮1f、第一限位杆1g和第二限位杆1h,第一气缸1a和第二气缸1b对称设置在支撑机构4两侧,第一气缸1a输出轴与第一夹臂1c一端连接,第二气缸1b输出轴与第二夹臂1d一端连接,第一固定轮1e与第一夹臂1c远离第一气缸1a的一端转动连接,第二固定轮1f与第二夹臂1d远离第二气缸1b的一端转动连接,第一限位杆1g一端与第一固定轮1e远离第一夹臂1c的一面连接,第二限位杆1h一端与第二固定轮1f远离第二夹臂1d的一面连接,第一限位杆1g位于第二限位杆1h上方。
所述推进机构3包括第一电机3a、第二电机3b、第一皮带3c、第二皮带3d和四个限位轮3e,第一电机3a和第二电机3b均水平设置,第一电机3a和第二电机3b固定在支撑机构4内,两个限位轮3e与第一电机3a两端的输出轴连接,两个限位轮3e与第二电机3b两端的输出轴连接,第一皮带3c和第二皮带3d均竖直设置,第一皮带3c分别与第一电机3a和第二电机3b同一侧上的限位轮3e连接,第二皮带3d分别与第一电机3a和第二电机3b远离第一皮带3c一侧上的限位轮3e连接,第一电机3a和第二电机3b转动,第一电机3a和第二电机3b输出轴与四个限位轮3e连接,四个限位轮3e旋转带动第一皮带3c和第二皮带3d转动,第一皮带3c和第二皮带3d上的第一抓力条3c1和第二抓力条3d1与树木接触,使设备能稳定的向上攀升,提高强劲的动力,不会出现打滑,突然下降等问题,树与设备能很好的贴合在一起,在下降的时候也能与树产生较大的摩擦,避免突然下坠,造成设备摔落的情况。
所述支撑机构4包括顶板4a、机体4b、第一延伸臂4c、第二延伸臂4d、第一扶手4e和第二扶手4f,机体4b竖直设置,顶板4a与机体4b顶部连接,第一延伸臂4c和第二延伸臂4d水平设置,第一延伸臂4c和第二延伸臂4d对称设置在机体4b侧壁上,第一延伸臂4c和第二延伸臂4d与机体4b侧壁固定连接,第一扶手4e和第二扶手4f水平设置,第一扶手4e位于第一延伸臂4c外侧壁上,第一扶手4e与第一延伸臂4c固定连接,第二扶手4f位于第二延伸臂4d外侧壁上,第二扶手4f与第二延伸臂4d固定连接,这个设备通过机体4b连接在一起,保证设备的稳定,第一延伸臂4c和第二延伸臂4d能更好的与树贴合,保证设备与树贴合,第一扶手4e和第二扶手4f便于工人搬运设备,工人手抓住第一扶手4e和第二扶手4f能更好的移动设备。
所述顶板4a上设置于控制器4a1,控制器4a1与顶板4a固定连接,第一电机3a、第二电机3b、第三电机4b2和第四电机4b3均与控制器4a1电连接,控制器4a1控制第一电机3a、第二电机3b、第三电机4b2和第四电机4b3,使设备脱离人之后,能进行远程操作,简化操作步骤,降低工作难度。
所述机体4b上设置有四个通口4b1,四个通口4b1贯穿机体4b侧壁,两个通口4b1在上方与第一皮带3c和第二皮带3d上端接触,两个通口4b1在下方与第一皮带3c和第二皮带3d下端连接,四个通口4b1能检查第一皮带3c和第二皮带3d的使用情况,同时可以排出落入设备中的树叶和小树枝,保证设备的正常运行,不会出现卡住设备的问题。
所述第一皮带3c设置有若干第一抓力条3c1,第二皮带3d上设置有若干第二抓力条3d1,第一抓力条3c1沿第一皮带3c宽度方向,若干第一抓力条3c1沿第一皮带3c长度方向,第二抓力条3d1沿第二皮带3d宽度方向,若干第二抓力条3d1沿第二皮带3d长度方向,第一抓力条3c1和第二抓力条3d1与树接触,能使设备很好的夹在树上。
所述机体4b上设置有第三电机4b2、第四电机4b3、第一齿轮4b4、第二齿轮4b5、第三齿轮4b6和第四齿轮4b7,第三电机4b2和第四电机4b3竖直设置,第三电机4b2和第四电机4b3输出轴均竖直向下,第三电机4b2输出轴与第一齿轮4b4连接,第四电机4b3输出轴与第二齿轮4b5连接,第三齿轮4b6与第二刀片2b固定连接,第四齿轮4b7与第三刀片2c固定连接,第一齿轮4b4、第二齿轮4b5、第三齿轮4b6和第四齿轮4b7均与机体4b转动连接,第一齿轮4b4与第三齿轮4b6啮合,第二齿轮4b5与第四齿轮4b7啮合,第三电机4b2和第四电机4b3转动,第一齿轮4b4和第三齿轮4b6转动带动第二齿轮4b5和第四齿轮4b7转动,第二刀片2b和第三刀片2c摆动与树贴合。
所述第一延伸臂4c内设置有第三气缸4c1,第二延伸臂4d你设置有第四气缸4d1,第三气缸4c1和第四气缸4d1均竖直设置,第三气缸4c1位于第一延伸臂4c远离机体4b的一端上,第四气缸4d1位于第二延伸臂4d远离机体4b的一端上,第三气缸4c1贯穿第一延伸臂4c,垫气缸与第一延伸臂4c固定连接,第四气缸4d1贯穿第二延伸臂4d,第四气缸4d1与第二延伸臂4d固定连接,第三气缸4c1和第四气缸4d1分别与第四刀片2d和第五刀片2e连接,第三气缸4c1和第四气缸4d1用来控制第四刀片2d和第五刀片2e转动角度,保证第四刀片2d和第五刀片2e与树贴合。
所述第一固定轮1e上设置有第一挡条1e1,第二固定轮1f上设置有第二挡条1f1,第一挡条1e1一端与第一延伸臂4c连接,第一挡条1e1远离第一延伸臂4c的一端与第一限位杆1g连接,第二挡条1f1一端与第二延伸臂4d连接,第二挡条1f1远离第二延伸臂4d的一端与第二限位杆1h连接第一挡条1e1和第二挡条1f1能起到一定的支撑作用,同时保护第一固定轮1e和第二固定轮1f,能将第一固定轮1e和第二固定轮1f上的树叶和树枝阻挡下来,保证第一固定轮1e和第二固定轮1f干净和稳定性。
所述第一固定轮1e设置有若干第一防滑条1e2,第二固定轮1f上设置有若干第二防滑条1f2,若干第一防滑条1e2呈一定角度与第一固定轮1e连接,若干第二防滑条1f2呈一定角度与第二固定轮1f连接,若干第一防滑条1e2沿第一固定轮1e长度方向呈两排均匀分布,若干第二防滑条1f2沿第二固定轮1f长度方向呈两排均匀分布,第一防滑条1e2和第二防滑条1f2与树接触,能保证第一固定轮1e和第二固定轮1f在工作时,有很好的摩擦力,设备在高速运行时更加稳定。
工作原理:在进行树木修剪时,工人手抓住第一扶手4e和第二扶手4f移动设备到需要修剪的树木下,将设备通过遥控器调节第二刀片2b、第三刀片2c、第四刀片2d、第五刀片2e、第一夹臂1c和第二夹臂1d张开,第一气缸1a、第二气缸1b、第三气缸4c1、第四气缸4d1、第三电机4b2和第四电机4b3转动,将设备与树木贴合在调节再命令控制器4a1控制第一气缸1a、第二气缸1b、第三气缸4c1、第四气缸4d1、第三电机4b2和第四电机4b3转动,第二刀片2b、第三刀片2c、第四刀片2d、第五刀片2e、第一夹臂1c和第二夹臂1d夹紧与树木贴合,同时第一限位杆1g和第二限位杆1h也与树木贴合,通过遥控器命令控制器4a1,控制器4a1控制第一电机3a和第二电机3b转动,第一电机3a输出轴和第二电机3b输出轴带动四个限位轮3e转动,四个限位轮3e带动第一皮带3c和第二皮带3d转动,第一皮带3c和第二皮带3d转动带动第一抓力条3c1和第二抓力条3d1与树木贴合,第一抓力条3c1和第二抓力条3d1与树木之间产生摩擦力,设备向上运动,第一固定轮1e和第二固定轮1f在第一皮带3c和第二皮带3d的带动下,沿树木转动,第一固定轮1e和第二固定轮1f上的第一防滑条1e2和第二防滑条1f2与树木接触,加大摩擦力,设备能更好的与树木贴合,在第一电机3a和第二电机3b的转动下,能更平稳的与树木贴合,上升时由于第一抓力条3c1、第二抓力条3d1、第一防滑条1e2和第二防滑条1f2能防止设备上升的过程中出现下滑,设备能强有力的稳定上升,在上升的过程中,设备上的第二刀片2b、第三刀片2c、第四刀片2d、第五刀片2e、第一夹臂1c和第二夹臂1d能与树木稳定贴合,第一刀片2a、第二刀片2b、第三刀片2c、第四刀片2d和第五刀片2e均切割树枝,树枝与第一刀片2a、第二刀片2b、第三刀片2c、第四刀片2d和第五刀片2e上刀口接触,在第一电机3a和第二电机3b提供的推进力下,树枝从树上被切割下来,无线遥控器命令控制器4a1,控制器4a1控制第一电机3a和第二电机3b转动到修剪高度,然后控制器4a1控制第一电机3a和第二电机3b向下移动,第一皮带3c和第二皮带3d上的抓力条与树木接触,第一固定轮1e和第二固定轮1f上的第一防滑条1e2和第二防滑条1f2也与树木接触,设备下降受到摩擦力,设备下降稳定,不会出现突然下降的问题,当设备下降到树木底部时,控制器4a1命令第一电机3a和第二电机3b停止运作,工人抓住第一扶手4e和第二扶手4f,通过遥控器命令控制器4a1,控制器4a1控制第二刀片2b、第三刀片2c、第四刀片2d、第五刀片2e、第一夹臂1c和第二夹臂1d张开,工人将设备从树上取下,安装到下一棵需要修剪的树上。
需要声明的是,上述具体实施方式仅仅为本发明的较佳实施例及所运用技术原理。本领域技术人员应该明白,还可以对本发明做各种修改、等同替换、变化等等。但是,这些变换只要未背离本发明的精神,都应在本发明的保护范围之内。另外,本申请说明书和权利要求书所使用的一些术语并不是限制,仅仅是为了便于描述。
一种用于树枝修剪的直升式攀爬剃刀专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0