

IPC分类号 : H04L29/06,H04L29/08,G08C17/02,B63B35/00







专利摘要
本发明公开了一种基于双主控和电源管理的无人艇控制传输系统及控制传输方法,其中,总主控板接收GPS模块和传感器装载平台的数据,通过第一无线传输模块传递给中转服务器,然后发送给上位机,上位机对接收的数据进行解析并发出控制指令;中转服务器将接收到的控制指令进行分类,将信息获取指令通过第一无线通信模块发送至总主控板,将动作指令通过第二无线通信模块发送至副主控板,副主控板对动作指令进行判别,配合电机驱动板完成对电机的精确控制,将执行结果通过第二无线通信模块反馈回中转服务器,然后反馈给上位机;电源管理模块用于实现电源管理和控制。本发明减少了控制信号的延时,避免电流扰动的发生,可拓展性强,减少开发代码量。
权利要求
1.一种基于双主控和电源管理的无人艇控制传输系统,其特征在于,包括上位机、中转服务器、总主控板、副主控板、能源模块、电源管理模块、电机驱动模块、传感器装载平台、GPS模块、第一无线通信模块和第二无线通信模块,
其中,总主控板接收GPS模块和传感器装载平台的数据,通过第一无线传输模块传递给中转服务器,中转服务器再把数据信息发送给上位机,上位机对接收的数据进行解析得到结果,并发出控制指令给中转服务器;中转服务器将接收到的控制指令进行分类,并将信息获取指令通过第一无线通信模块发送至总主控板,将动作指令通过第二无线通信模块发送至副主控板,副主控板对动作指令进行判别,之后配合电机驱动板,完成对动作电机和动作舵机的精确控制,并将执行结果通过第二无线通信模块反馈回中转服务器,由中转服务器反馈给上位机;另外,电源管理模块用于对总主控板和电机驱动板实现电源管理和控制;
所述能源模块包括燃料电池、太阳能光伏电池和电源,电源包括相互独立的第一电源和第二电源,氢燃料电池或太阳能光伏电池为第一电源和第二电源充电;该燃料电池为无人艇的主推动力,以太阳能光伏电池作为无人艇的辅助能源供应;通过电源管理模块实现燃料电池及光伏太阳能电池对锂电池的充放电调度;
所述第一电源和第二电源均为锂电池,燃料电池为以氢能源为燃料的质子交换膜燃料电池。
2.根据权利要求1所述的一种基于双主控和电源管理的无人艇控制传输系统,其特征在于:所述第一电源和第二电源上都设有电压传感器,并由总主控板接收电压传感器的电压信号,根据预制电源管理规则控制电源管理模块管理能源模块。
3.根据权利要求1所述的一种基于双主控和电源管理的无人艇控制传输系统,其特征在于:所述电源管理模块包括第一继电器KM1、第二继电器KM2、第三继电器KM3和第四继电器KM4,其中,第一继电器KM1的公共端与第一电源的正极相连,第一继电器KM1的常闭端与第三继电器KM3的常开端相串联,第一继电器KM1的常开端与第二继电器KM2的常闭端相串联;第二继电器KM2的公共端与充电端相串联,第二继电器KM2的常开端与第四继电器KM4的常闭端相串联;第三继电器KM3的公共端与放电端相串联,第三继电器KM3的常闭端与第四继电器KM4的常开端相串联;第四继电器KM4的公共端与第二电源的正极相连。
4.根据权利要求1所述的一种基于双主控和电源管理的无人艇控制传输系统,其特征在于:所述传感器装载平台包括传感器和单路继电器,传感器设置于传感器装载平台上的分仓内,传感器与总主控板直接连接,直接向总主控板传输采集的模拟电压信号,总主控板控制单路继电器,进而控制传感器装载平台。
5.根据权利要求1所述的一种基于双主控和电源管理的无人艇控制传输系统,其特征在于:所述总主控板为MEGA2560,副主控板为UNO。
6.根据权利要求1所述的一种基于双主控和电源管理的无人艇控制传输系统,其特征在于:所述第一无线通信模块和第二无线通信模块均为SIM900A。
7.一种采用权利要求1-6任一项所述基于双主控和电源管理的无人艇控制传输系统的控制传输方法,其特征在于,该方法包括以下步骤:
(1)传感器数据传输过程
(11)上位机通过中转服务器向总主控板搭载的第一无线通讯模块发送采集数据的指令;
(12)总主控板开始接受传感器传输回来的模拟电压信号和GPS传输回来的数字信号;
(13)总主控板将GPS信号和传感器信号进行组合,形成固定的报文格式;
(14)总主控板将固定的报文格式通过第一无线通讯模块发送给中转服务器;
(15)中转服务器将报文通过因特网发送给上位机;
(16)上位机对报文进行解析,将传感器的模拟信号按照各个传感器的标定曲线进行计算,获得实测数值,并显示出来;
(2)控制信号传输
(21)上位机向中转服务器发送所需要执行动作的指令,动作的指令为预设字符;
(22)中转服务器根据字符与动作的映射关系,将不同的字符按照控制动作的总、副主控板不同分别发送给第一无线通信模块和第二无线通信模块;
(23)第一通信模块将字符传送到总主控板,总主控板对字符进行识别并控制相应的继电器打开或是关闭,让电机做出相应的动作;
(24)第二无线通信模块将字符传送到副主控板,副主控板对字符进行识别并向电机驱动板的四个控制端口输出不同的调制脉宽信号组合,电机驱动板控制向电机输出对应的电流驱动电机做出相应动作。
说明书
技术领域
本发明涉及自动控制及无线通信系统,特别是涉及一种基于双主控和电源管理的无人艇控制传输系统及控制传输方法。
背景技术
无人艇控制传输系统,是一种通过无线通信传递信号,并由下位机执行上位机通过无线传递过来的指令的综合系统,同时下位机向上位机传输执行结果和信息。
近年来,随着国家大力推行,无人艇的设计研发推广工作被列为重点实施项目,其中,无人艇已经成为研究的热点之一。迫切需要一套简单,易行,且实用的无线控制传输系统。
目前,开源硬件越来越受到学校和开发者的欢迎,他们有成熟的社区,可以找到各种各样的资源和专家,有丰富的技术支持。传统的无线控制传输系统,大多使用51, AVR等控制芯片开发。开发时存在很多问题:(1)设计周期长。每一个电路都要自己去设计,每一个原件也都要自己去添加。(2)代码工作量大。因为是自己设计的电路板,每一项都需要代码去关心,代码复杂性增加导致代码工作量大。(3)无通用性。因一个电路只为一种工作设计,故不能由一个产品迁移向另一款相似产品。(4)专业知识要求高。设计电路被配合代码正确运行需要海量的电子技术知识和自动控制知识。
目前,大多数无人艇多采用安放于艇内的锂电池作为主动力,具有以下优点:(1)避免传统船舶航行时带来的噪音污染、水体污染;(2)与使用柴油相比,减少不可持续能源的利用,减缓能源紧缺压力,缓解生态恶化;(3)设备相对简单,适合产业化,具有良好应用前景。但是,无人艇使用锂电池作为主推动力,也同时存在以下几个缺点: (1)无人艇的主要工作环境为水下,水下环境复杂,一旦船体遇到故障或者意外进水,会导致整船沉没;(2)整个无人艇艇的供电来源源于锂电池,一旦锂电池失效或损毁,整个无人艇将失去动力,以及与外界的联系。
发明内容
发明目的:为解决现有技术的不足,提供一种基于双主控和电源管理的无人艇控制传输系统及控制传输方法。
技术方案:本发明提供了一种基于双主控和电源管理的无人艇控制传输系统,包括上位机、中转服务器、总主控板、副主控板、能源模块、电源管理模块、电机驱动模块、传感器装载平台、GPS模块、第一无线通信模块和第二无线通信模块,
其中,总主控板接收GPS模块和传感器装载平台的数据,通过第一无线传输模块传递给中转服务器,中转服务器再把数据信息发送给上位机,上位机对接收的数据进行解析得到结果,并发出控制指令给中转服务器;中转服务器将接收到的控制指令进行分类,并将信息获取指令通过第一无线通信模块发送至总主控板,将动作指令通过第二无线通信模块发送至副主控板,副主控板对动作指令进行判别,之后配合电机驱动板,完成对动作电机和动作舵机的精确控制,并将执行结果通过第二无线通信模块反馈回中转服务器,由中转服务器反馈给上位机;另外,电源管理模块用于对总主控板和电机驱动板实现电源管理和控制。
优选的,所述能源模块包括燃料电池、太阳能光伏电池和电源,电源包括相互独立的第一电源和第二电源,氢燃料电池或太阳能光伏电池为第一电源和第二电源充电;该燃料电池为无人艇的主推动力,以太阳能光伏电池作为无人艇的辅助能源供应;通过电源管理模块实现燃料电池及光伏太阳能电池对锂电池的充放电调度。
优选的,所述第一电源和第二电源均为锂电池,燃料电池为以氢能源为燃料的质子交换膜燃料电池。
优选的,所述第一电源和第二电源上都设有电压传感器,并由总主控板接收电压传感器的电压信号,根据预制电源管理规则控制电源管理模块管理能源模块。
优选的,所述电源管理模块包括第一继电器KM1、第二继电器KM2、第三继电器 KM3和第四继电器KM4,其中,第一继电器KM1的公共端与第一电源的正极相连,第一继电器KM1的常闭端与第三继电器KM3的常开端相串联,第一继电器KM1的常开端与第二继电器KM2的常闭端相串联;第二继电器KM2的公共端与充电端相串联,第二继电器KM2的常开端与第四继电器KM4的常闭端相串联;第三继电器KM3的公共端与放电端相串联,第三继电器KM3的常闭端与第四继电器KM4的常开端相串联;第四继电器KM4的公共端与第二电源的正极相连。
优选的,所述传感器装载平台包括传感器和单路继电器,传感器设置于传感器装载平台上的分仓内,传感器与总主控板直接连接,直接向总主控板传输采集的模拟电压信号,总主控板控制单路继电器,进而控制传感器装载平台。
优选的,所述总主控板为MEGA2560,副主控板为UNO。
优选的,所述第一无线通信模块和第二无线通信模块均为SIM900A。
本发明还提供了一种采用上述基于双主控和电源管理的无人艇控制传输系统的控制传输方法,该方法包括以下步骤:
(1)传感器数据传输过程
(11)上位机通过中转服务器向总主控板搭载的第一无线通讯模块发送采集数据的指令;
(12)总主控板开始接受传感器传输回来的模拟电压信号和GPS传输回来的数字信号;
(13)总主控板将GPS信号和传感器信号进行组合,形成固定的报文格式;
(14)总主控板将固定的报文格式通过第一无线通讯模块发送给中转服务器;
(15)中转服务器将报文通过因特网发送给上位机;
(16)上位机对报文进行解析,将传感器的模拟信号按照各个传感器的标定曲线进行计算,获得实测数值,并显示出来;
(2)控制信号传输
(21)上位机向中转服务器发送所需要执行动作的指令,动作的指令为预设字符;
(22)中转服务器根据字符与动作的映射关系,将不同的字符按照控制动作的总、副主控板不同分别发送给第一无线通信模块和第二无线通信模块;
(23)第一通信模块将字符传送到总主控板,总主控板对字符进行识别并控制相应的继电器打开或是关闭,让电机做出相应的动作;
(24)第二无线通信模块将字符传送到副主控板,副主控板对字符进行识别并向电机驱动板的四个控制端口输出不同的调制脉宽信号组合,电机驱动板控制向电机输出对应的电流驱动电机做出相应动作。
有益效果:与现有技术相比,本发明采用双主控板,减少了总主控板的负载,减少了动力控制信号的延时,保证动作的及时执行;采用能源控制系统,对能源控制有要求的无人艇有极大的辅助作用,为船载能源的管理提供一种由四路继电器控制的可控能源分配模式;双主控板及且动力驱动板的使用,将动力电路与控制电路分开,避免了电流扰动的发生;可以通过总主控板的IO接口和模拟接口搭载多种传感器,多种执行元件,可以做到丰富的可拓展性,且极大的减少开发时的代码量。
附图说明
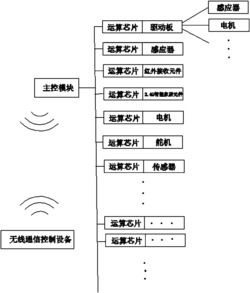
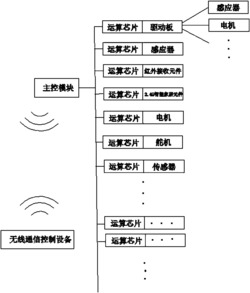
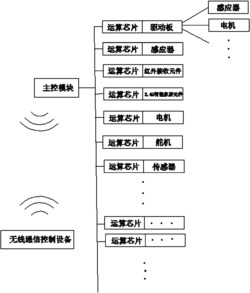
图1是本发明系统的结构示意图;
图2是本发明系统的能源管理模块示意图。
具体实施方式
下面结合附图和具体实施方式对本发明的技术方案进行详细的说明。
如图1所示,一种基于双主控和电源管理的无人艇控制传输系统,包括上位机、中转服务器、总主控板、副主控板、能源模块、电源管理模块、电机驱动板、传感器装载平台、GPS模块、第一无线通信模块(无线通信模块一)和第二无线通信模块(无线通信模块二),其中总主控板接收GPS模块和传感器装载平台的数据,通过第一无线传输模块传递给中转服务器,中转服务器再把数据信息发送给上位机,上位机对接收的数据进行解析得到结果,并发出控制指令给中转服务器;中转服务器将接收到的控制指令进行分类,并将信息获取指令通过第一无线通信模块发送至总主控板,将动作指令通过第二无线通信模块发送至副主控板,副主控板对动作指令进行判别,之后配合电机驱动板,完成对动作电机和动作舵机的精确控制,并将执行结果通过第二无线通信模块反馈回中转服务器,由中转服务器反馈给上位机;另外,电源管理模块用于对总主控板和电机驱动板实现电源管理和控制。
本实施例中以Arduino为主控板选择,选择MEGA2560为总主控板,UNO为副主控板;第一无线通信模块和第二无线通信模块均选择SIM900A。
能源模块包括燃料电池和电池组,电池组包括相互独立的第一电源和第二电源,氢燃料电池为第一电源和第二电源充电。本实施例中第一电源和第二电源均为锂电池,燃料电池为以氢能源为燃料的质子交换膜燃料电池(PEMFC),该燃料电池为无人艇的主推动力(主能源供应),另外,以太阳能为能源供应的太阳能光伏电池作为无人艇的辅助能源供应;通过电源管理模块实现燃料电池及光伏太阳能电池对锂电池的充放电调度,在一定程度上优化了船载能源结构,提供了船载能源的利用效率。
电源管理模块的电路图如图2所示,电源管理模块可以实现对双电源的切换、充放电、并对控制电路和动力电路进行隔离;其包括四个继电器,分别为第一继电器KM1、第二继电器KM2、第三继电器KM3和第四继电器KM4,其中,第一继电器KM1的公共端与第一电源相连,第一继电器KM1的常闭端与第三继电器KM3的常开端相串联,第一继电器KM1的常开端与第二继电器KM2的常闭端相串联;第二继电器KM2的公共端与充电端(燃料电池的接入口)相串联,第二继电器KM2的常开端与第四继电器 KM4的常闭端相串联;第三继电器KM3的公共端与放电端(电源管理模块之后的接出口)相串联,第三继电器KM3的常闭端与第四继电器KM4的常开端相串联;第四继电器KM4的公共端与第二电源的正极相连。第二继电器KM2用于管理第一电源和第二电源的充电,第三继电器KM3用于管理第一电源和第二电源的放电;因此,第一继电器 KM1确保了第一电源只能处于充电或者放电两种状态中的一种,第二继电器KM2确保充电端只有一个电源(第一电源或第二电源)在充电,第三继电器KM3确保放电端只有一个电源(第一电源或第二电源)在放电,第四继电器KM4确保第二电源只能处在充电或者放电两种状态中的一种。
在表1的状态表中,我们可以清楚的看到每个继电器端口的开关状态所对应的整个发明的七种状态:
状态1:第一电源和第二电源都不工作;
状态2:只有第一电源放电;
状态3:只有第二电源放电;
状态4:只有第一电源充电;
状态5:只有第二电源充电;
状态6:第一电源充电同时第二电源放电;
状态7:第一电源放电同时第二电源充电。
以5V的弱电控制继电器为例,假设继电器输入高电平触发,1为高电平,0为低电平。以KM1、KM4、KM3和KM2为输入顺序则得到如下的结果:
表1
由结果可知,通过对四个信号的调整,就能达到相互隔离并相互切换的效果。同时也适用于单电源的充放电,切断管理,只需将第二电源接口悬空连接即可。
第一电源和第二电源上都设有电压传感器,并由总主控板接收电压传感器的电压信号,根据预制电源管理规则控制电源管理模块管理能源模块。
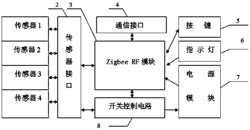
传感器装载平台包括传感器和单路继电器,其包括工作或不工作两种状态,传感器装载平台受总主控板控制的单路继电器控制,传感器装载平台上设置有多个分仓,并可通过填入弹性材料适应不同传感器形状。传感器与总主控板直接连接,直接向总主控板传输采集的模拟电压信号。
副主控板、电机驱动板、动作电机、动作舵机和第二无线通信模块构成动力控制模块,总主控板、传感器装载平台和第一无线通信模块构成主控制模块。副主控板直接输出PWM信号,并通过控制电机驱动板控制动作电机和动作舵机运动,总主控板通过控制电源管理模块来控制船载的能源模块的使用,通过调整副主控板对电机驱动板输出的脉宽调制信号(即调整PWM信号的方波占空比),当调整为左大右小时,左电机转速高,右电机转速低;当调整为左小右大时,左电机转速低,右电机转速高。
总主控板连接的第一无线通信模块向中转服务器发送传感器采集到的模拟电压数据,同时接收来自中转服务器的指令,并根据指令做出动作和反馈。
副主控板连接的第二无线通信模块向中转服务器发送标识自己的数据,同时接收来自中转服务器的指令,在副主控板接收指令并处理后向电机驱动板输出相应的脉宽调制信号。
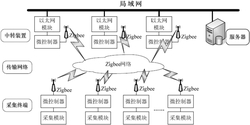
中转服务器将接收的数据备份且发送至上位机,中转服务器通过蜂窝网络与第一无线通信模块和第二无线通信模块相连接,并通过有线网络与上位机相连。
上位机接收中转服务器发送的原始数据,并根据其内置的数据解析函数,按照一定的组织规则分类、处理数据,且显示在屏幕上,同时上位机接收用户输入的控制指令。这里采用的函数关系和规则均为现有技术,不做详细介绍。
本系统在动作实现方面采用发送PWM信号(脉宽调制信号)实现双螺旋浆差速控制。当接收到上位机传送的动作指令,如向右转时,则右侧的电机控制信号减小,左侧的电机控制信号增大,直接控制电机驱动板控制左侧电机的电流增大,转速增高,而右侧的电机电流信号减小,转速也相应降低,通过左右电机的转速差距实现船体的右转动作。左转与之类似。
同时本系统也可以将电机两个控制口的信号反转实现倒车。
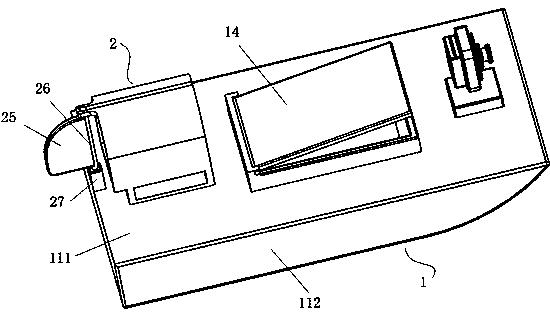
本系统可搭载多种传感器模块。并专门配备了升降式传感器搭载平台,以便在到达指定位置时通过指令将传感器置于水中,进行数据的采集并回传至上位机。例如实例中搭载的浊度传感器,总主控板向传感器供电,同时由模拟数字接口接收传感器传来的电压信息,并临时保存,等待发送。
当所有传感器的数据读取完毕,总主控板调用第一无线通信模块,以一定的报文格式将传感器数据发送到中转服务器,后传入上位机。上位机对电压数据进行分类,分类之后对原始的电压数据按照已知的传感器拟合曲线进行计算,并在屏幕上显示出来。
工作时,总主控板搭载第一无线通信模块SIM900A和GPS模块,通过无线通信模块向中转服务器发送数据并接受指令;副主控板搭载第二块无线通信模块SIM900A,并从中接受动作指令,对动作指令进行判别,之后配合电机驱动板,完成对动作电机和动作舵机的精确控制,并将执行结果反馈回中转服务器;中转服务器通过无线蜂窝网络与无人艇搭载的第一无线通信模块和第二无线通信模块进行数据交换,同时中转服务器通过网络将无人艇发送回来的数据发送到上位机,上位机接受数据并解析得到结果;中转服务器也接受来自上位机的用户控制指令,将指令分类,动作指令发送至副主控板的第二无线通信模块,信息获取指令发送至总主控板的第一无线通信模块。其中,上位机对数据解析包括分类和计算,分类是将传感器与上位机本身的电信号对应起来,计算是由厂商提供的各个传感器电信号与物理量的对应关系式得到实测值。
一种采用上述基于双主控和电源管理的无人艇控制传输系统的控制传输方法,该方法包括以下步骤:
(1)传感器数据传输过程
(11)上位机通过中转服务器向总主控板搭载的第一无线通讯模块发送采集数据的指令。
(12)总主控板开始接受传感器传输回来的模拟电压信号和GPS传输回来的数字信号。
(13)总主控板将GPS信号和传感器信号进行组合,形成固定的报文格式。
(14)总主控板将固定的报文格式通过第一无线通讯模块发送给中转服务器。
(15)中转服务器将报文通过因特网发送给上位机。
(16)上位机对报文进行解析,将传感器的模拟信号按照各个传感器的厂商标定曲线进行计算,获得实测数值,并显示出来。
(2)控制信号传输
(21)上位机向中转服务器发送所需要执行动作的指令,动作的指令为提前约定好的字符。
(22)中转服务器根据字符与动作的映射关系,将不同的字符按照控制动作的总、副主控板不同分别发送给第一无线通信模块和第二无线通信模块。
(23)第一通信模块将字符传送到总主控板,总主控板对字符进行识别并控制相应的继电器打开或是关闭,让电机做出相应的动作。
(24)第二无线通信模块将字符传送到副主控板,副主控板对字符进行识别并向电机驱动板的四个控制端口输出不同的调制脉宽信号组合,电机驱动板控制向电机输出对应的电流驱动电机做出相应动作。
本发明以总主控板管理能量来源,调配能量的来源及电池的充放电,同时配合多路继电器管理船载设备;以四路继电器为电源管理核心,主要实现燃料电池对船载锂电池的充放电;以总主控板搭配各类传感器,将数据读取并通过第一无线通信模块发送到中转服务器,并由中转服务器发送到上位机;以总主控板装载GPS模块,实现对无人艇的远程位置监控;以总主控板串口硬件连接第一无线通信模块,进行数据交换;以副主控板管理动力电路,单独连接无线传输模块,接受上位机的动作指令,减少总主控板的传输负载,并减少动作延时;副主控板配合各种的动力驱动板来实现控制电路和动力电路的隔离,避免因为电流脉动而对控制信号的影响。
一种基于双主控和电源管理的无人艇控制传输系统及控制传输方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0