





专利摘要
本发明提供一种近场电流体动力喷印工作电压具有短延迟时间的控制方法,包括如下步骤:进行初始化,输入近场电流体动力喷印设备的工作电压,获取实际电压;根据工作电压和实际电压,计算误差电压;构建近场电流体动力喷印设备的缩短工作电压延迟时间的输入电压模型,得到输入电压;将得到的输入电压传输到近场电流体动力喷印设备的高压电源;获取近场电流体动力喷印设备的高压电源的实际电压,判断获取的实际电压是否等于工作电压;当实际电压等于工作电压时,近场电流体动力喷印设备进行图案喷印。本发明的有益效果是,有效控制近场电流体动力喷印设备的工作电压的延迟时间,从而提高近场电流体动力喷印图案的质量。
权利要求
1.一种近场电流体动力喷印工作电压具有短延迟时间的控制方法,
其特征在于,包括如下步骤:
步骤一:对近场电流体动力喷印控制系统进行初始化设置,并设置近场电流体动力喷印设备的工作电压vw;
步骤二:获取近场电流体动力喷印设备的高压电源的实际电压va;
步骤三:根据步骤一的工作电压vw和步骤二的实际电压va,计算误差电压Δv,Δv=vw-va;
步骤四:根据步骤三的工作电压vw和误差电压Δv,构建近场电流体动力喷印设备的缩短工作电压延迟时间的输入电压模型vr=kfvw+keΔv,其输入电压为vr;
式中:kf为前馈电压系数,kf>0,ke为误差电压系数,ke>0;
步骤五:将得到的输入电压vr传输到近场电流体动力喷印设备的高压电源;
步骤六:获取近场电流体动力喷印设备的高压电源的实际电压va,判断获取的实际电压va是否等于近场电流体动力喷印的工作电压vw,如果是,执行步骤七,否则,重复步骤二至步骤六;
步骤七:根据步骤六中得到的高压电源的实际电压va作为近场电流体动力喷印设备的工作电压,进行近场电流体动力喷印图案。
2.根据权利要求1所述的近场电流体动力喷印工作电压具有短延迟时间的控制方法,其特征在于,步骤一中的初始化为设置近场电流体动力喷印控制系统的初始参数,所述初始参数包括喷印的起始位置、运动的速度和加速度、喷印高度、喷印溶液的流量。
3.根据权利要求1所述的近场电流体动力喷印工作电压具有短延迟时间的控制方法,其特征在于,所述缩短工作电压延迟时间模块中设有用于控制近场电流体动力喷印设备的高压电源的输出电压变化时的缩短延迟时间的控制器。
说明书
技术领域
本发明涉及一种电流体动力喷印领域,具体涉及一种近场电流体动力喷印工作电压具有短延迟时间的控制方法。
背景技术
近场电流体动力喷印技术是在电场作用力下微毛细管喷嘴产生射流或液滴在承印物上喷印微纳米图案。作为一种新型的非接触式印刷,近场电流体动力喷印技术在微纳器件制造领域得到广泛关注。近场电流体动力喷印技术能够喷印各种有序的微/纳米图案,如连续直线、平行线、网格线、圆弧线、曲线、串珠结构等多种形状。在信息、能源、生物医学、国防等领域具有广泛的应用前景,如可穿戴式传感器、柔性电子、微电子机械系统、生物传感器、气体传感器、纳米发电机、晶体管,组织工程和光学器件等。
近场电流体动力喷印是在电场、流场、运动场等多物理场多参数耦合作用下形成的喷印图案,基于开环控制的近场电流体动力喷印技术难以保证喷印图案的质量。为提高近场电流体动力喷印图案的质量,在近场电流体动力喷印过程中,进行全闭环控制,实时控制喷印图案,根据喷印图案的状态实时调整多个工艺参数,如工作电压、喷射高度、流量、基板运动速度等,实现近场电流体动力喷印图案的精确成形。电流体动力喷印设备所施加的工作电压一般为几百伏特到几千伏特,当输入一定的输入电压时,实际电压上升或下降到输入电压值,由于硬件电路的影响,需要经过较长的时间,在近场电流体动力喷印全闭环控制过程中,较大的延迟时间对近场电流体动力喷印图案质量将会产生较大的影响。
发明内容
本发明的目的在于提供一种近场电流体动力喷印工作电压具有短延迟时间的控制方法,有效控制近场电流体动力喷印设备的工作电压的延迟时间,缩短工作电压的变化时间,从而提高近场电流体动力喷印图案的质量。
一种近场电流体动力喷印工作电压具有短延迟时间的控制方法,包括如下步骤:
步骤一:对近场电流体动力喷印控制系统进行初始化设置,并设置近场电流体动力喷印设备的工作电压vw;
步骤二:获取近场电流体动力喷印设备的高压电源的实际电压va;
步骤三:根据步骤一的工作电压vw和步骤二的实际电压va,计算误差电压Δv,Δv=vw-va;
步骤四:根据步骤三的工作电压vw和误差电压Δv,构建近场电流体动力喷印设备的缩短工作电压延迟时间的输入电压模型vr=kfvw+keΔv,其输入电压为vr;
式中:kf为前馈电压系数,kf>0,ke为误差电压系数,ke>0;
步骤五:将得到的输入电压vr传输到近场电流体动力喷印设备的高压电源;
步骤六:获取近场电流体动力喷印设备的高压电源的实际电压va,判断获取的实际电压va是否等于近场电流体动力喷印的工作电压vw,如果是,执行步骤七,否则,重复步骤二至步骤六;
步骤七:根据步骤六中得到的高压电源的实际电压va作为近场电流体动力喷印设备的工作电压,进行近场电流体动力喷印图案。
步骤一中的初始化为设置近场电流体动力喷印控制系统的初始参数,所述初始参数包括喷印的起始位置、运动的速度和加速度、喷印高度、喷印溶液的流量。
所述缩短工作电压延迟时间模块中设有用于控制近场电流体动力喷印设备的高压电源的输出电压变化时的延迟时间的控制器。
本发明具有的有益效果,有效控制近场电流体动力喷印设备的工作电压的延迟时间,缩短工作电压的变化时间,从而提高近场电流体动力喷印图案的质量。
附图说明
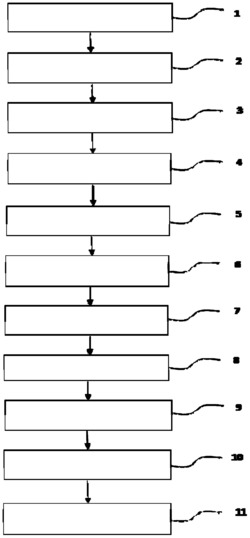
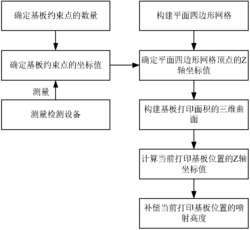
图1为本发明的流程图。
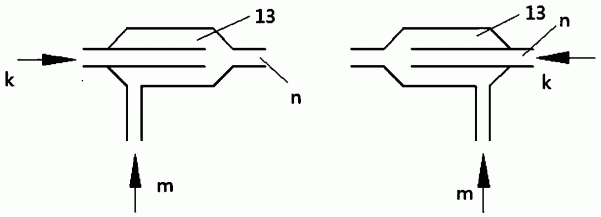
图2为本发明的缩短延迟时间控制器框图。
图3为未采用本发明控制方法的近场电流体动力喷印设备的高压电源的实际电压的变化图。
图4为采用本发明的控制方法的近场电流体动力喷印设备的高压电源的实际电压的变化图。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中及实施例,对本发明进一步详细说明。
本实施例为一种近场电流体动力喷印工作电压具有短延迟时间的控制方法,该方法由近场电流体动力喷印控制系统控制近场电流体动力喷印设备的高压电源实现,
该控制系统系统包括:
人机界面模块、数据输入模块、数据采集模块和缩短工作电压延迟时间模块,人机界面模块与数据输入模块连接,数据输入模块与缩短工作电压延迟时间模块连接,数据采集模块设置在缩短工作电压延迟时间模块的输出端,并与缩短工作电压延迟时间模块构成反馈,缩短工作电压延迟时间模块与近场电流体动力喷印设备控制连接。
一种近场电流体动力喷印工作电压具有短延迟时间的控制方法的流程图如图1所示,其具体包括以下步骤:
步骤一:对近场电流体动力喷印控制系统进行初始化设置,并设置近场电流体动力喷印设备的工作电压vw;
需要说明的是:通过人机界面模块进行初始化,初始化的内容是设置近场电流体动力喷印控制系统的初始参数,所述初始参数包括喷印的起始位置、运动的速度和加速度、喷印高度、喷印溶液的流量;
通过人机界面模块,将近场电流体动力喷印的工作电压通过数据输入模块传递给缩短工作电压延迟时间模块,再通过数据输入模块,将其接收的期望电压发送到的高压电源的输入端;
步骤二:通过数据采集模块,从近场电流体动力喷印设备采集高压电源的实际电压,并将所采集的实际电压发送到缩短工作电压延迟时间模块;
步骤三:在缩短工作电压延迟时间模块中,根据步骤一的工作电压vw和步骤二的实际电压va,计算误差电压Δv,Δv=vw-va;
式中:Δv为近场电流体动力喷印的工作电压与实际电压之间的误差电压,vw为近场电流体动力喷印设备的工作电压,va为所采集近场电流体动力喷印设备的高压电源的实际电压;
步骤四:在缩短工作电压延迟时间模块中,根据步骤三的工作电压vw和误差电压Δv,构建近场电流体动力喷印设备的缩短工作电压延迟时间的输入电压模型,其输入电压vr,vr=kfvw+keΔv;
式中:vr为近场电流体动力喷印设备的缩短工作电压延迟时间的输入电压,vw为近场电流体动力喷印设备的工作电压,Δv为近场电流体动力喷印的工作电压与实际电压之间的误差,kf为前馈电压系数,kf>0,ke为误差电压系数,ke>0;
步骤五:通过数据输入模块,将步骤四中的输入电压vr发送到近场电流体动力喷印设备的高压电源;
步骤六:获取近场电流体动力喷印设备的高压电源的实际电压va,判断获取的实际电压va是否等于近场电流体动力喷印的工作电压vw,如果实际电压va等于工作电压vw,执行步骤七,否则,重复执行步骤二至步骤六;
步骤七:根据步骤六中得到的高压电源的实际电压va作为近场电流体动力喷印设备的工作电压,近场电流体动力喷印控制系统控制近场电流体动力设备喷印图案。
如图2所示,缩短工作电压延迟时间模块中设有用于控制近场电流体动力喷印设备的高压电源的输出电压变化时的缩短延迟时间控制器,图中的虚线框内部分为缩短延迟时间控制器,缩短延迟时间控制器包括前馈控制器、电压误差控制器和设备高压电源,图中vf为前馈补偿控制电压,vf=kfvw,kf为前馈电压系数,vw为近场电流体动力喷印设备的工作电压,vΔ为电压误差补偿控制电压,vΔ=keΔv,ke为误差电压系数,Δv为近场电流体动力喷印的工作电压与实际电压之间的误差电压。缩短延迟时间控制器一般经过两次循环就能实现高压电源的实际电压等于工作电压,大大缩短工作电压的延迟时间。当高压电源的实际电压等于工作电压时,近场电流体动力喷以设备就可以进行图案喷印。
如图3所示,当近场电流体动力喷印设备的工作电压为3000V时,近场电流体动力喷印设备没有采用短延迟时间的控制方法,工作电压的延迟时间为4.280秒。
如图4所示,当近场电流体动力喷印设备的工作电压为3000V时,采用本发明提供的短延迟时间的控制方法,并且前馈电压系数取kf=0.914,误差电压系数取ke=0.65时,其延迟时间为1.103秒。采用本发明提供的短延迟时间的控制方法,近场电流体动力喷印设备的工作电压的延迟时间缩短了74.229%。
本发明优点:首次在近场电流体动力喷印设备中对工作电压进行短延迟时间控制,并且能有效控制近场电流体动力喷印设备的高压电源的输出电压变化时的延迟时间;利用软件实现近场电流体动力喷印设备工作电压具有短延迟时间的控制方法,该方法随时可更改、可扩充、可升级、调试方便等优点,其控制效果稳定和大大缩短工作电压变化的延迟时间,从而提高近场电流体动力喷印图案的质量。
近场电流体动力喷印工作电压具有短延迟时间的控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0