







专利摘要
本发明公开了一种悬臂梁弯曲形变实时监测方法。建立一个悬臂梁弯曲形变实时监测装置,包括:嵌入式端、电脑端;嵌入式端,固定在待测悬臂梁上,用于实时监测待测悬臂梁的形变;电脑端,用于远程监控实时数据,提供软件的数据接口,计算并显示实时角度值、最大挠度位置、最大挠度值、受力点和受力大小和模拟梁受力变形的实时模型动画等功能;方法对采集的角度数据进行去噪处理、零点处理和分度数处理这三个阶段的滤波处理;并建立了形变检测数学模型;本发明提供了起重机臂、吊机臂等承重受力机械设备的构造类力学分析模型的建立,也可以用于实体梁臂受力弯曲变形的实时监测。
权利要求
1.一种悬臂梁弯曲形变实时监测方法,其特征在于具体步骤为:
(1)建立一个悬臂梁弯曲形变实时监测装置,包括:嵌入式端、电脑端;
嵌入式端,包括:无线角度传感模块、微控制器模块、无线数据传输模块、显示模块;微控制器模块与无线角度传感模块、无线数据传输模块、显示模块电连接;
嵌入式端,用于传感器数据采集、数据解析、数据滤波、数据转换运算、显示图形和字符形式的运算结果、对参数进行实时监测和阈值报警、与电脑端进行无线通信,向电脑端发送滤波处理后的数据、接收电脑端的控制指令;嵌入式端,固定在待测悬臂梁上,用于实时监测待测悬臂梁的形变;
无线角度传感模块,至少包括一个三轴的角度传感器,角度传感器提供一个三轴直角坐标系中三个轴的瞬时角度变化;角度传感器放置在待测悬臂梁的自由端端点,实时监测自由端点角度值并回传,提供无线数据传输功能;
微控制器模块,用于数据分析、数据滤波、数据转换运算、对参数进行实时监测和阈值报警、输出图形和字符形式的运算结果到显示模块;
无线数据传输模块,用于与无线角度传感模块进行无线通信、与电脑端进行无线通信,与微控制器模块进行有线通信;
显示模块,以图形和字符形式,显示形变过程和结果;
电脑端,包括:1)数据传输中转器;2)电脑及上位机软件;
电脑端,用于远程监控实时数据,提供软件的数据接口,与嵌入式端进行无线通信,接收嵌入式端处理后的数据,以及向嵌入式端发送控制指令;电脑端上位机软件,实现了接收串口传回的数据、发送串口编码指令、图形界面上显示采样回来的实时角度值、最大挠度位置、最大挠度值、受力点和受力大小和模拟出梁受力变形的实时模型动画;
数据传输中转器,用于:1)接收嵌入式端通过无线方式回传的数据,并用串口将数据发送至电脑,再由上位机软件进行处理;2)接收电脑通过串口发送的控制指令,通过无线通信方式将控制指令发至嵌入式端;
(2)步骤(1)的嵌入式端,提供三大功能模式:参数设置模式、标定功能模式与测量功能模式;
参数设置模式,该模式功能包括:参数设置、阈值设置、滤波使能、无线数据传输使能、无线信道检测、角度传感器检测;
参数设置,设置梁的长度、梁的弯曲刚度;
阈值设置,设置压力大小阈值点、最大挠度值阈值点,选择是否开启阈值报警功能;在测量功能模式下开启阈值报警功能,如果监测到压力值与最大挠度值都超过了设置的阈值点,装置发出报警并在显示模块上显示报警标志;
滤波使能,选择开启或关闭滤波功能;
无线数据使能,选择开启或关闭通过无线模式向电脑端回传数据的功能;
无线信道检测,检测无线模块是否存在,是否能正常运行功能;
角度传感器检测,检测是否有角度传感器返回的数据;
标定功能模式,该模式功能有:标定角度零点、修正角度偏差和标定所要测量梁的弯曲刚度;
标定角度零点,用于悬臂梁模型的标定;在待测悬臂梁未受外部压力的静止情况下,采样待测悬臂梁静止状态下的角度值,将其标定为角度零点值;
修正角度偏差,用于悬臂梁模型的标定;标定过程为:以待测悬臂梁的自由端点为梁的端点,在梁的端点处施加向下的压力,待角度值稳定后,将角度值保存;
测量功能模式,其功能有:角度传感器数据采集、数据解析、数据滤波、数据转换运算、用图形和数值字符形式显示运算结果、实时监测角度变化和阈值报警,与电脑端进行无线通信,与电脑端传输滤波后的数据、接收电脑端的控制指令;
(3)步骤(1)中的悬臂梁弯曲形变实时监测装置对待测悬臂梁进行形变检测,需要对无线传感模块采集的角度数据进行滤波处理;滤波处理方法如下:
在滤波处理中,将角度值分为三个阶段量进行处理,分别是:角度裸值、内部分度数和角度视数;总共可分为三个步骤:去噪处理、零点处理和分度数处理;
角度裸值,是角度传感器采样回来未通过处理的角度值,即角度最原始数据;
内部分度数,是角度裸值经过去噪处理、零点处理后得到的角度计算量;
角度视数,是内部分度数进行分度数处理后最终的滤波输出量,作为滤波处理输出的角度值;
去噪处理,用于过滤掉导致采样数值不稳定的波动,去噪处理包括:对角度裸值做追零判断、滑动平均滤波、加权滤波;去噪处理步骤如下:
Q1,输入角度裸值;
Q2,追零范围判断处理;
Q3,滑动平均滤波;
Q4,加权滤波;
Q5,角度变化范围处理;
Q6,输出角度滤波值;
追零范围判断处理,用于判断当前角度裸值是否在追零范围内;若为追零范围内,便通过零点修正来进行追零处理,并输出追零输出值;若超出追零范围,将当前角度裸值舍去;
追零范围,取待测悬臂梁未受到外力的静止状态下,采到的角度值最大变化范围;
追零处理,是当角度值在规定的范围内时,将角度值递增或递减,使得角度值趋近于0;
滑动平均滤波,用一个滑动平均滤波数组来存放追零输出值做滤波运算参考量,数组大小为N,N为大于或等于10的自然数;采用N个参考量进行滤波平均,每进行一次滑动平均滤波,就将新的追零输出值放入数组第一个元素里;
对于滑动平均滤波数组,提供两种填充操作模式:快速刷新填充操作、缓慢刷新填充操作;
快速刷新填充操作模式,将数组中的前三个追零输出值放入到数组最后三位,并把剩下的数组元素用上一次滤波输出的追零输出值予以填充;
缓慢刷新填充操作模式,将数组里面的追零输出值逐一往前传递;
滑动平均滤波,把两种填充操作模式进行结合,将一个滤波处理周期内先运行M次缓慢刷新填充操作,再执行Q次快速刷新填充操作;M为大于或等于2的自然数,Q为大于或等于2的自然数;每次填充完毕后,都对数组内的N个元素求平均数,并将平均数输出至加权滤波;
加权滤波,用于在不同的变化过程中对角度裸值赋予不同权重值;
加权滤波,若待测悬臂梁构件为稳定状态时,削弱新采集的角度裸值权重;若梁构件为非稳定状态时,加强新采集的角度裸值权重;
加权滤波,先判断是否达到内部分度数的稳定状态;
内部分度数的稳定状态,为新输入的角度裸值与上一个滤波输出的角度视数相差不超过一个设定的范围;
若达到内部分度数的稳定状态,其滤波计算式为:滤波输出值=(新输入的角度裸值*1+上一个滤波输出角度视数*3)/4;上式中,新输入的角度裸值权重为25%;
若未达到内部分度数的稳定状态,其滤波计算式是:滤波输出值=(新输入的角度裸值*3+上一个滤波输出角度视数*1)/4;上式中,新输入的角度裸值权重为75%;
角度变化范围处理函数,用于将新输入的角度裸值与上一次的滤波输出值做比较,根据变化范围区间来判断角度值是否稳定,并确定内部分度数达到稳定状态时所需滤波次数;
零点处理,用于修正待测悬臂梁在工作中引起的角度零点偏差,解决以下情况导致的测量偏差:1)待测悬臂梁在每一次受力形变再返回静态时的形状改变,导致角度传感器采集待测悬臂梁在静态时的角度零点值都会与标定时的标定零点值有偏差;2)待测悬臂梁由于长期处于受力状态的机械损耗,导致待测悬臂梁在静态时实际的角度零点值与标定时的标定零点值偏差的逐渐变大;
零点处理,包括:零点修正、自动追零;
零点修正,包括三个功能:修正标定零点差值、修正累计零点、过滤角度差值;
修正标定零点,用于将每次采集的角度零点值都减去标定时的标定零点值;
修正累计零点,用于将追零后所产生的追零量算入角度裸值中,改变待测悬臂梁静态时的角度零点值;
过滤角度差值,用于通过计算悬臂梁自由端的端点与悬臂梁固定端的端点角度值相对变化值,来检测待测悬臂梁的弯曲形变,使待测悬臂梁不受其自身倾斜的影响;处理待测悬臂梁自身倾斜的方法为:以标定时的自由端端点的角度值判定为水平放置角度值,当角度值有变化角θ时,测量形变时的角度值Δθ是减去变化角θ的输出;
自动追零,用于将在追零范围内的当前角度值,按照设定的时间频率进行追零运算;若当前角度值大于零点值时,追零量自增,反之则追零量自减;当前角度值的变化在设定的范围内时,为稳定;
自动追零流程如下:
Z1,判断是否达到追零跟踪时间,如果达到则进入Z2,否则跳出自动追零程序;
Z2,判断当前角度值是否稳定,如果稳定则进入Z3,否则跳出自动追零程序;
Z3,判断当前角度值是否小于或等于追零范围,如果小于或等于进入Z4,否则跳出自动追零程序;
Z4,判断当前零点是否大于最小差值,如果大于进入Z6,否则进入Z5;
Z5,追掉末值,并完成自动追零程序;
Z6,判断当前角度值是否为正,如果为正就进入Z8,否则进入Z7;
Z7,追零量自减,并完成自动追零程序;
Z8,追零量自增,并完成自动追零程序;
追掉末值,用于将当前角度值归零;
零点处理执行后,将零点处理后的角度值转换成内部分度数,公式为:
CntIn_Cur=Angle/32768*180°,式中Angle代表滤波输出后的角度值,CntIn_Cur代表内部分度数;
分度数处理,用于避免在待测悬臂梁受力变形抖动现象造成的测量数据不稳定;
分度数处理,通过判断分视值所在的变化范围,并根据所在的变化范围,进行滤波运算;
分视值,内部分度数与分度数处理输出值的差值;
分度数处理,设置3个分度数变化临界值:3C、6C和10C;C为设置的分度数变化的基本量,其中C为0.5°的正整数倍;3C临界点就代表3倍基本量的值,6C临界点就代表6倍基本量的值,10C临界点就代表10倍基本量的值;
分度数处理程序流程如下:
N1、判断分视值是否小于3C,如果是则跳出分度数处理程序,否则进入N2;
N2、判断分视值是否小于6C,如果是则进入N2-1,否则进入N3;
N2-1、将内部分度数累加8次,并求出8次的平均值作为分度数处理的输出;
N3、判断分视值是否小于10C,如果是则进入N3-1,否则进入N3-2;
N3-1、将内部分度数累加15次,并求出15次的平均值作为分度数处理的输出;
N3-2、将内部分度数累加3次,并求出3次的平均值作为分度数处理的输出;
(4)建立一个悬臂梁形变检测数学模型和关键参数,悬臂梁形变检测数学模型如下:
需要监测的参数有:待测悬臂梁在自由端受力大小Fp与梁的最大挠度值wmax;
待测悬臂梁在自由端受力大小Fp的计算式为:
待测悬臂梁的最大挠度值wmax的计算式为:
待测悬臂梁结构模型的挠曲线方程为:
在公式①、②和③中,Δθ代表从滤波函数输出的角度值;L为梁的长度,EI为梁的弯曲刚度,由标定模式中确定的EI值所得;
待测悬臂梁形变检测模型是仅受单点作用在梁自由端的合力所发生弯曲形变模型;以梁的轴线所在平面,以梁的固定支点为原点O,以梁水平伸展方向为X轴正半轴方向建立平面坐标系XOW;受到作用在梁臂自由端垂直X轴向下的力Fp发生弯曲变形;θB为悬臂梁梁臂自由端端点的切线方向与悬臂梁静止时的夹角;B为合力点到梁自由端端点的距离值;
其中,悬臂梁的弯矩M(x)为:
M(x)=Fp*(L-x)④式
悬臂梁的截面转角和挠曲线方程为:
对于公式④和⑤式,当x=L时,θ(x)和w(x)有最大值:
通过公式⑦和⑧式,便可求出压力Fp、wmax的θB的关系式:
(5)采用步骤(1)悬臂梁弯曲形变实时监测装置,根据步骤(4)的数学模型,在屏幕上显示用动画模拟形变情况,动画绘制方法如下:
绘制出待测悬臂梁形变模拟动画,用于在嵌入式端和电脑端观察梁受力形变情况;形变模拟动画由角度传感器传回的实时角度值,经过滤波处理输出后,代入形变检测数学模型,最终将计算出的结果转换成绘制点,并在屏幕上绘制待测悬臂梁受力变形轴线的实时模拟动画;
动画在屏幕上显示,屏幕包括:显示模块或电脑的显示器;
梁轴线形变模拟动画构建步骤:1)建立两个坐标系:梁坐标系xoy与绘制坐标系x`o`y`,梁坐标系的o点与绘制坐标系o`点重合,梁坐标系用于表示梁计算中所用到的坐标系参数,绘制坐标系用于表示屏幕上绘制图形所用到的绘制坐标点;2)确定动画基本绘制点数量;通过梁挠曲线方程计算出每个绘制点在屏幕上的显示坐标;3)对模拟动画的每个绘制点进行分段绘制;
在屏幕上显示由挠曲线方程计算出来的模拟动画曲线,需要将计算结果转换成屏幕上的坐标点,该转换需要主要用到以下几个重要变量:
模拟动画曲线绘制点数量DRAW_DOP,该数量不小于3;
绘制区x`轴长度graph_size,该长度不小于30,且为模拟动画曲线绘制点数量DRAW_DOP的整数倍;
梁坐标系中x轴分量点数组beam_x[],括号内为0到DRAW_DOP-1的DRAW_DOP个整数;beam_x[]数组存放均匀分布在梁轴线上的点在梁坐标系中的x轴坐标,其每一个数组元素与前一个元素差值都为梁长度的DRAW_DOP分之一;
绘制坐标系x`轴分量点数组draw_x[],括号内为0到DRAW_DOP-1的DRAW_DOP个整数;
绘制坐标系与梁坐标系y轴缩放比draw_scale_y;
存储绘制点y`轴坐标值数组lcd_y[],括号内为0到DRAW_DOP-1的DRAW_DOP个整数;
graph_size变量为屏幕上动画绘制区域的x`轴长度,beam_x[]数组存放均匀分布在梁轴线上的点在梁坐标系中的x轴坐标,其每一个数组元素与前一个元素差值都为梁长度的DRAW_DOP分之一;数组beam_x[]的元素从原点开始计算,每一个元素与上一个元素的对应式为beam_x[i]=length/DRAW_DOP+beam_x[i-1];
其中,length为梁的长度,i取值区间为[1,DRAW_DOP-1];在计算中,将beam_x[]里的元素逐一代入draw_x[]数组存放均匀分布在绘制区域的x`轴坐标点,即将绘制区域的x`轴长度均匀分成DRAW_DOP份,每份分割点对应在x`轴上的坐标点;draw_x[]数组的元素从坐标原点开始计算,每一个元素与上一个元素的对应式为draw_x[i]=graph_size/DRAW_DOP+draw_x[i-1];
draw_scale_y变量为绘制坐标系与梁坐标系y轴缩放比,其作用为按比例显示梁坐标系中梁的挠度在绘制坐标系上的绘制坐标点;draw_scale_y的计算公式为:
draw_scale_y=graph_size/length;
lcd_y[]数组存放的是绘制坐标系中绘制点y`轴坐标值,lcd_y[]数组共有DRAW_DOP个元素,每个元素与该点对应在梁坐标轴中的挠度值都有倍数draw_scale_y的关系;lcd_y[]数组第i个元素的计算公式为lcd_y[i]=bend(beam_x[i])*draw_scale_y;bend()是悬臂梁结构模型的挠曲线方程w(x),bend(beam_x[i])是beam_x[i]数组的第i个元素挠曲线方程;
根据上述参数的运用和计算,便可求出在绘制坐标系中的绘制点坐标;
并进行分段画线操作,可得出梁轴线的模拟动画曲线,分段划线的方式为:对每两两相邻的绘制点采用直线段连接;形变模拟动画曲线绘制流程如下所示:
H1、清除绘制区图形;
H2、逐一计算各绘制点在屏幕上的坐标值;
H3、分段画线操作。
说明书
技术领域
本发明涉及形变监测领域,特别是一种悬臂梁弯曲形变实时监测方法。
背景技术
悬臂梁是一端为不产生轴向、垂直位移和转动的固定支座,另一端为自由端的梁,其受到梁臂上的压力导致梁发生弯曲变形。例如起重机臂、吊机臂等都可以简化为悬臂梁模型。这类梁臂作为重要的承重受力机械设备,在工作时因受力产生形变在所难免,而过度的形变不但会损坏梁臂,还会带来重大的生产事故造成不可预计的人员、财产损失。因此,提供一个实时检测悬臂梁梁臂受力、形变的装置方法非常有必要。
现有的测量技术主要有:应变片和计算机视觉。其中,应变片测量技术较为成熟,该技术精度高、寿命长,但作为一种植入式的测量方法,无法判断受力大小、无法测量弯曲位移量,同时高成本、灵活性差是该技术的不足。计算机视觉测量是这几年新起的技术,该技术对计算机视觉观察的性能和图像采集设备的安装调试的要求都很高,且容易因为视觉上的遮挡而影响。
基于以上技术的不足,本发明提出了一种悬臂梁梁臂模型的受力、形变实时监测装置方法。
发明内容
本发明的目的是提供一种悬臂梁弯曲形变实时监测方法。
具体步骤为:
(1)建立一个悬臂梁弯曲形变实时监测装置,包括:嵌入式端、电脑端。
嵌入式端,包括:无线角度传感模块、微控制器模块、无线数据传输模块、显示模块。微控制器模块与无线角度传感模块、无线数据传输模块、显示模块电连接。
嵌入式端,用于传感器数据采集、数据解析、数据滤波、数据转换运算、显示图形和字符形式的运算结果、对参数进行实时监测和阈值报警、与电脑端进行无线通信,向电脑端发送滤波处理后的数据、接收电脑端的控制指令。
嵌入式端,固定在待测悬臂梁上,用于实时监测待测悬臂梁的形变。
无线角度传感模块,至少包括一个三轴的角度传感器,角度传感器提供一个三轴直角坐标系中三个轴的瞬时角度变化。角度传感器放置在待测悬臂梁的自由端端点,实时监测自由端点角度值并回传,提供无线数据传输功能。
微控制器模块,用于数据分析、数据滤波、数据转换运算、对参数进行实时监测和阈值报警、输出图形和字符形式的运算结果到显示模块。
无线数据传输模块,用于与无线角度传感模块进行无线通信、与电脑端进行无线通信,与微控制器模块进行有线通信。
显示模块,以图形和字符形式,显示形变过程和结果。
电脑端,包括:1)数据传输中转器;2)电脑及上位机软件。
电脑端,用于远程监控实时数据,提供软件的数据接口,与嵌入式端进行无线通信,接收嵌入式端处理后的数据,以及向嵌入式端发送控制指令。电脑端上位机软件,实现了接收串口传回的数据、发送串口编码指令、图形界面上显示采样回来的实时角度值、最大挠度位置、最大挠度值、受力点和受力大小和模拟出梁受力变形的实时模型动画等功能。
数据传输中转器,用于:1)接收嵌入式端通过无线方式回传的数据,并用串口将数据发送至电脑,再由上位机软件进行处理;2)接收电脑通过串口发送的控制指令,通过无线通信方式将控制指令发至嵌入式端。
(2)步骤(1)的嵌入式端,提供三大功能模式:参数设置模式、标定功能模式与测量功能模式。
参数设置模式,该模式功能包括:参数设置、阈值设置、滤波使能、无线数据传输使能、无线信道检测、角度传感器检测。
参数设置,设置梁的长度、梁的弯曲刚度。
阈值设置,设置压力大小阈值点、最大挠度值阈值点,选择是否开启阈值报警功能;在测量功能模式下开启阈值报警功能,如果监测到压力值与最大挠度值都超过了设置的阈值点,装置发出报警并在显示模块上显示报警标志。
滤波使能,选择开启或关闭滤波功能。
无线数据使能,选择开启或关闭通过无线模式向电脑端回传数据的功能。
无线信道检测,检测无线模块是否存在,是否能正常运行功能。
角度传感器检测,检测是否有角度传感器返回的数据。
标定功能模式,该模式功能有:标定角度零点、修正角度偏差和标定所要测量梁的弯曲刚度。
标定角度零点,用于悬臂梁模型的标定。在待测悬臂梁未受外部压力的静止情况下,采样待测悬臂梁静止状态下的角度值,将其标定为角度零点值。
修正角度偏差,用于悬臂梁模型的标定。标定过程为:以待测悬臂梁的自由端点为梁的端点,在梁的端点处施加向下的压力,待角度值稳定后,将角度值保存。
测量功能模式,其功能有:角度传感器数据采集、数据解析、数据滤波、数据转换运算、用图形和数值字符形式显示运算结果、实时监测角度变化和阈值报警,与电脑端进行无线通信,与电脑端传输滤波后的数据、接收电脑端的控制指令。
(3)步骤(1)中的悬臂梁弯曲形变实时监测装置对待测悬臂梁进行形变检测,需要对无线传感模块采集的角度数据进行滤波处理。滤波处理方法如下:
在滤波处理中,将角度值分为三个阶段量进行处理,分别是:角度裸值、内部分度数和角度视数。总共可分为三个步骤:去噪处理、零点处理和分度数处理。
角度裸值,是角度传感器采样回来未通过处理的角度值,即角度最原始数据;
内部分度数,是角度裸值经过去噪处理、零点处理后得到的角度计算量;
角度视数,是内部分度数进行分度数处理后最终的滤波输出量,作为滤波处理输出的角度值。
去噪处理,用于过滤掉导致采样数值不稳定的波动,去噪处理包括:对角度裸值做追零判断、滑动平均滤波、加权滤波。去噪处理步骤如下:
Q1,输入角度裸值;
Q2,追零范围判断处理;
Q3,滑动平均滤波;
Q4,加权滤波;
Q5,角度变化范围处理;
Q6,输出角度滤波值。
追零范围判断处理,用于判断当前角度裸值是否在追零范围内。若为追零范围内,便通过零点修正来进行追零处理,并输出追零输出值。若超出追零范围,将当前角度裸值舍去。
追零范围,取待测悬臂梁未受到外力的静止状态下,采到的角度值最大变化范围。
追零处理,是当角度值在规定的范围内时,将角度值递增或递减,使得角度值趋近于0。
滑动平均滤波,用一个滑动平均滤波数组来存放追零输出值做滤波运算参考量,数组大小为N,N(N为大于或等于10的自然数)。采用N个参考量进行滤波平均,每进行一次滑动平均滤波,就将新的追零输出值放入数组第一个元素里。
对于滑动平均滤波数组,提供两种填充操作模式:快速刷新填充操作、缓慢刷新填充操作。
快速刷新填充操作模式,将数组中的前三个追零输出值放入到数组最后三位,并把剩下的数组元素用上一次滤波输出的追零输出值予以填充。
缓慢刷新填充操作模式,将数组里面的追零输出值逐一往前传递。
滑动平均滤波,把两种填充操作模式进行结合,将一个滤波处理周期内先运行M(M为大于或等于2的自然数)次缓慢刷新填充操作,再执行Q(Q为大于或等于2的自然数)次快速刷新填充操作。每次填充完毕后,都对数组内的N个元素求平均数,并将平均数输出至加权滤波。
加权滤波,用于在不同的变化过程中对角度裸值赋予不同权重值。
加权滤波,若待测悬臂梁构件为稳定状态时,削弱新采集的角度裸值权重;若梁构件为非稳定状态时,加强新采集的角度裸值权重。
加权滤波,先判断是否达到内部分度数的稳定状态。
内部分度数的稳定状态,为新输入的角度裸值与上一个滤波输出的角度视数相差不超过一个设定的范围。
若达到内部分度数的稳定状态,其滤波计算式为:滤波输出值=(新输入的角度裸值*1+上一个滤波输出角度视数*3)/4;上式中,新输入的角度裸值权重为25%。
若未达到内部分度数的稳定状态,其滤波计算式是:滤波输出值=(新输入的角度裸值*3+上一个滤波输出角度视数*1)/4;上式中,新输入的角度裸值权重为75%。
角度变化范围处理函数,用于将新输入的角度裸值与上一次的滤波输出值做比较,根据变化范围区间来判断角度值是否稳定,并确定内部分度数达到稳定状态时所需滤波次数。
零点处理,用于修正待测悬臂梁在工作中引起的角度零点偏差,解决以下情况导致的测量偏差:1)待测悬臂梁在每一次受力形变再返回静态时的形状改变,导致角度传感器采集待测悬臂梁在静态时的角度零点值都会与标定时的标定零点值有偏差;2)待测悬臂梁由于长期处于受力状态的机械损耗,导致待测悬臂梁在静态时实际的角度零点值与标定时的标定零点值偏差的逐渐变大。
零点处理,包括:零点修正、自动追零。
零点修正,包括三个功能:修正标定零点差值、修正累计零点、过滤角度差值。
修正标定零点,用于将每次采集的角度零点值都减去标定时的标定零点值。
修正累计零点,用于将追零后所产生的追零量算入角度裸值中,改变待测悬臂梁静态时的角度零点值。
过滤角度差值,用于通过计算悬臂梁自由端的端点与悬臂梁固定端的端点角度值相对变化值,来检测待测悬臂梁的弯曲形变,使待测悬臂梁不受其自身倾斜的影响。处理待测悬臂梁自身倾斜的方法为:以标定时的自由端端点的角度值判定为水平放置角度值,当角度值有变化角θ时,测量形变时的角度值Δθ是减去变化角θ的输出。
自动追零,用于将在追零范围内的当前角度值,按照设定的时间频率进行追零运算。若当前角度值大于零点值时,追零量自增,反之则追零量自减。当前角度值的变化在设定的范围内时,为稳定。
自动追零流程如下:
Z1,判断是否达到追零跟踪时间,如果达到则进入Z2,否则跳出自动追零程序;
Z2,判断当前角度值是否稳定,如果稳定则进入Z3,否则跳出自动追零程序;
Z3,判断当前角度值是否小于或等于追零范围,如果小于或等于进入Z4,否则跳出自动追零程序;
Z4,判断当前零点是否大于最小差值,如果大于进入Z6,否则进入Z5;
Z5,追掉末值,并完成自动追零程序;
Z6,判断当前角度值是否为正,如果为正就进入Z8,否则进入Z7;
Z7,追零量自减,并完成自动追零程序;
Z8,追零量自增,并完成自动追零程序。
追掉末值,用于将当前角度值归零。
零点处理执行后,将零点处理后的角度值转换成内部分度数,公式为:CntIn_Cur=Angle/32768*180°,式中Angle代表滤波输出后的角度值,CntIn_Cur代表内部分度数。
分度数处理,用于避免在待测悬臂梁受力变形抖动现象造成的测量数据不稳定。
分度数处理,通过判断分视值所在的变化范围,并根据所在的变化范围,进行滤波运算。
分视值,内部分度数与分度数处理输出值的差值。
分度数处理,设置3个分度数变化临界值:3C、6C和10C。C为设置的分度数变化的基本量(C为0.5°的正整数倍),3C临界点就代表3倍基本量的值,6C临界点就代表6倍基本量的值,10C临界点就代表10倍基本量的值。
分度数处理程序流程如下:
N1、判断分视值是否小于3C,如果是则跳出分度数处理程序,否则进入N2;
N2、判断分视值是否小于6C,如果是则进入N2-1,否则进入N3;
N2-1、将内部分度数累加8次,并求出8次的平均值作为分度数处理的输出;
N3、判断分视值是否小于10C,如果是则进入N3-1,否则进入N3-2;
N3-1、将内部分度数累加15次,并求出15次的平均值作为分度数处理的输出;
N3-2、将内部分度数累加3次,并求出3次的平均值作为分度数处理的输出;
(4)在本发明的悬臂梁弯曲形变实时监测方法中,需建立一个悬臂梁形变检测数学模型和关键参数,悬臂梁形变检测数学模型如下:
需要监测的参数有:待测悬臂梁在自由端受力大小Fp与梁的最大挠度值wmax。
待测悬臂梁在自由端受力大小Fp的计算式为:
待测悬臂梁的最大挠度值wmax的计算式为:
待测悬臂梁结构模型的挠曲线方程为:
在公式①、②和③中,Δθ代表从滤波函数输出的角度值。L为梁的长度,EI为梁的弯曲刚度,由标定模式中确定的EI值所得。
待测悬臂梁形变检测模型是仅受单点作用在梁自由端的合力所发生弯曲形变模型。以梁的轴线所在平面,以梁的固定支点为原点O,以梁水平伸展方向为X轴正半轴方向建立平面坐标系XOW。受到作用在梁臂自由端垂直X轴向下的力Fp发生弯曲变形。θB为悬臂梁梁臂自由端端点的切线方向与悬臂梁静止时的夹角。B为合力点到梁自由端端点的距离值。
其中,悬臂梁的弯矩M(x)为:
M(x)=Fp*(L-x) ④式
悬臂梁的截面转角和挠曲线方程为:
对于公式④和⑤式,当x=L时,θ(x)和w(x)有最大值:
通过公式⑦和⑧式,便可求出压力Fp、wmax的θB的关系式:
(5)采用步骤(1)悬臂梁弯曲形变实时监测装置,根据步骤(4)的数学模型,在屏幕上显示用动画模拟形变情况,动画绘制方法如下:
绘制出待测悬臂梁形变模拟动画,用于在嵌入式端和电脑端观察梁受力形变情况。形变模拟动画由角度传感器传回的实时角度值,经过滤波处理输出后,代入形变检测数学模型,最终将计算出的结果转换成绘制点,并在屏幕上绘制待测悬臂梁受力变形轴线的实时模拟动画。
动画在屏幕上显示,屏幕包括:显示模块或电脑的显示器。
梁轴线形变模拟动画构建步骤:1)建立两个坐标系:梁坐标系xoy与绘制坐标系x`o`y`,梁坐标系的o点与绘制坐标系o`点重合,梁坐标系用于表示梁计算中所用到的坐标系参数,绘制坐标系用于表示屏幕上绘制图形所用到的绘制坐标点;2)确定动画基本绘制点数量。通过梁挠曲线方程计算出每个绘制点在屏幕上的显示坐标;3)对模拟动画的每个绘制点进行分段绘制。
在屏幕上显示由挠曲线方程计算出来的模拟动画曲线,需要将计算结果转换成屏幕上的坐标点,该转换需要主要用到以下几个重要变量:
模拟动画曲线绘制点数量DRAW_DOP,该数量不小于3;
绘制区x`轴长度graph_size,该长度不小于30,且为模拟动画曲线绘制点数量DRAW_DOP的整数倍;
梁坐标系中x轴分量点数组beam_x[],括号内为0到DRAW_DOP-1的DRAW_DOP个整数;beam_x[]数组存放均匀分布在梁轴线上的点在梁坐标系中的x轴坐标,其每一个数组元素与前一个元素差值都为梁长度的DRAW_DOP分之一。
绘制坐标系x`轴分量点数组draw_x[],括号内为0到DRAW_DOP-1的DRAW_DOP个整数;
绘制坐标系与梁坐标系y轴缩放比draw_scale_y;
存储绘制点y`轴坐标值数组lcd_y[],括号内为0到DRAW_DOP-1的DRAW_DOP个整数;
graph_size变量为屏幕上动画绘制区域的x`轴长度,beam_x[]数组存放均匀分布在梁轴线上的点在梁坐标系中的x轴坐标,其每一个数组元素与前一个元素差值都为梁长度的DRAW_DOP分之一。数组beam_x[]的元素从原点开始计算,每一个元素与上一个元素的对应式为beam_x[i]=length/DRAW_DOP+beam_x[i-1];
其中,length为梁的长度,i取值区间为[1,DRAW_DOP-1]。在计算中,将beam_x[]里的元素逐一代入draw_x[]数组存放均匀分布在绘制区域的x`轴坐标点,即将绘制区域的x`轴长度均匀分成DRAW_DOP份,每份分割点对应在x`轴上的坐标点。draw_x[]数组的元素从坐标原点开始计算,每一个元素与上一个元素的对应式为draw_x[i]=graph_size/DRAW_DOP+draw_x[i-1];
draw_scale_y变量为绘制坐标系与梁坐标系y轴缩放比,其作用为按比例显示梁坐标系中梁的挠度在绘制坐标系上的绘制坐标点。draw_scale_y的计算公式为:
draw_scale_y=graph_size/length;
lcd_y[]数组存放的是绘制坐标系中绘制点y`轴坐标值,lcd_y[]数组共有DRAW_DOP个元素,每个元素与该点对应在梁坐标轴中的挠度值都有倍数draw_scale_y的关系。lcd_y[]数组第i个元素的计算公式为lcd_y[i]=bend(beam_x[i])*draw_scale_y。
根据上述参数的运用和计算,便可求出在绘制坐标系中的绘制点坐标。并进行分段画线操作,可得出梁轴线的模拟动画曲线,分段划线的方式为:对每两两相邻的绘制点采用直线段连接。形变模拟动画曲线绘制流程如下所示:
H1、清除绘制区图形;
H2、逐一计算各绘制点在屏幕上的坐标值;
H3、分段画线操作。
本发明提供了一个悬臂梁梁臂模型的受力、形变实时监测的装置和方法,可以用于构造此类力学分析模型的建立,也可以用于实体梁臂受力弯曲变形的实时监测。克服了应变片和计算机视觉等测量方法的不足。
附图说明
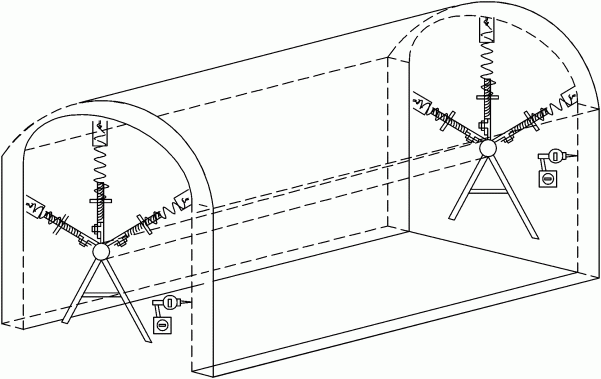
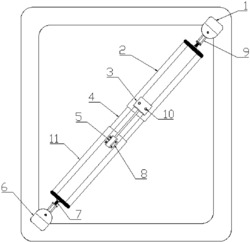
图1本发明的实施例装置的结构图;
图2本发明的平面直角坐标系xow及参数标注示意图;
图中标记:1、嵌入式端;2、电脑端;10、微控制器模块;11、无线数据传输模块;12、显示模块;13、无线角度传感模块;20、数据传输中转器;21、电脑。
具体实施方式
实施例:
一种悬臂梁弯曲形变实时监测装置,装置包括:嵌入式端1、电脑端2;
嵌入式端1,包括:无线角度传感模块13、微控制器模块10、无线数据传输模块11、显示模块12。微控制器模块10与无线角度传感模块13、无线数据传输模块11、显示模块12电连接。
嵌入式端1,用于传感器数据采集、数据解析、数据滤波、数据转换运算、显示图形和字符形式的运算结果、对参数进行实时监测和阈值报警、与电脑端2进行无线通信,向电脑端2发送滤波处理后的数据、接收电脑端2的控制指令;
嵌入式端1,固定在待测悬臂梁上,用于实时监测待测悬臂梁的形变;
无线角度传感模块13,至少包括一个三轴的角度传感器,每个角度传感器可以提供一个三轴直角坐标系中三个轴的瞬时角度变化。角度传感器放置在待监测悬臂梁自由端点端点位置,实时监测自由端点端点角度值,提供无线数据传输功能。
微控制器模块10,用于数据分析、数据滤波、数据转换运算、对参数进行实时监测和阈值报警、输出图形和字符形式的运算结果到显示模块12。
无线数据传输模块11,用于与无线角度传感模块13进行无线通信、与电脑端2进行无线通信,与微控制器模块10进行有线通信。
显示模块12,以图形和字符形式,显示形变过程和结果。
电脑端2,包括:数据传输中转器20、电脑21及上位机软件。
电脑端2,用于远程监控实时数据,提供软件的数据接口,与嵌入式端1进行无线通信,接收嵌入式端1处理后的数据,以及向嵌入式端1发送控制指令。电脑端2的上位机软件,实现了接收串口传回的数据、发送串口编码指令、图形界面上显示采样回来的实时角度值、最大挠度位置、最大挠度值、受力点和受力大小和模拟出梁受力变形的实时模型动画等功能。
数据传输中转器20,用于:1)接收嵌入式端1通过无线方式回传的数据,并用串口将数据发送至电脑21,再由上位机软件进行处理;2)接收电脑21通过串口发送的控制指令,通过无线通信方式将控制指令发至嵌入式端1。嵌入式端1,提供三大功能模式:参数设置模式、标定功能模式与测量功能模式。
参数设置模式,该模式功能包括:参数设置、阈值设置、滤波使能、无线数据传输使能、无线信道检测、角度传感器检测。
参数设置,设置梁的长度、梁的弯曲刚度。
阈值设置,设置压力大小阈值点、最大挠度值阈值点,选择是否开启阈值报警功能;在测量功能模式下开启阈值报警功能,如果监测到压力值与最大挠度值都超过了设置的阈值点,装置发出报警并在显示模块12上显示报警标志。
滤波使能,选择开启或关闭滤波功能。
无线数据使能,选择开启或关闭通过无线模式向电脑端2回传数据的功能。
无线信道检测,检测无线角度传感模块13是否存在,是否能正常运行功能。
角度传感器检测,检测是否有角度传感器返回的数据。
标定功能模式,该模式功能有:标定角度零点、修正角度偏差和标定所要测量梁的弯曲刚度。
标定角度零点,在待测悬臂梁未受外部压力的静止情况下,采样待测悬臂梁静止状态下的角度值,将其标定为角度零点值。
修正角度偏差,用于悬臂梁模型的标定。标定过程为:以待测悬臂梁的自由端点为梁的端点,在梁的端点处施加向下的压力,待角度值稳定后,将角度值保存。
测量功能模式,其功能有:角度传感器数据采集、数据解析、数据滤波、数据转换运算、用图形和数值字符形式显示运算结果、实时监测角度变化和阈值报警,与电脑端2进行无线通信,与电脑端2传输滤波后的数据、接收电脑端2的控制指令。
(1)采用本实例建立的装置对待测悬臂梁进行形变检测,需要对无线传感模块采集的角度数据进行滤波处理。滤波处理方法如下:
在滤波处理中,将角度值分为三个阶段量进行处理,分别是:角度裸值、内部分度数和角度视数。总共可分为三个步骤:去噪处理、零点处理和分度数处理。
角度裸值,是角度传感器采样回来未通过处理的角度值,即角度最原始数据;
内部分度数,是角度裸值经过去噪处理、零点处理后得到的角度计算量;
角度视数,是内部分度数进行分度数处理后最终的滤波输出量,作为滤波处理输出的角度值。
去噪处理,用于过滤掉导致采样数值不稳定的波动,去噪处理包括:对角度裸值做追零判断、滑动平均滤波、加权滤波。去噪处理步骤如下:
Q1,输入角度裸值;
Q2,追零范围判断处理;
Q3,滑动平均滤波;
Q4,加权滤波;
Q5,角度变化范围处理;
Q6,输出角度滤波值。
追零范围判断处理,用于判断当前角度裸值是否在追零范围内。若为追零范围内,便通过零点修正来进行追零处理,并输出追零输出值。若超出追零范围,将当前角度裸值舍去。
追零范围,取待测悬臂梁未受到外力的静止状态下,采到的角度值最大变化范围。
追零处理,是当角度值在规定的范围内时,将角度值递增或递减,使得角度值趋近于0。
滑动平均滤波,用一个滑动平均滤波数组来存放追零输出值做滤波运算参考量,数组大小为N,N(N为大于或等于10的自然数)。采用N个参考量进行滤波平均,每进行一次滑动平均滤波,就将新的追零输出值放入数组第一个元素里。
对于滑动平均滤波数组,提供两种填充操作模式:快速刷新填充操作、缓慢刷新填充操作。
快速刷新填充操作模式,将数组中的前三个追零输出值放入到数组最后三位,并把剩下的数组元素用上一次滤波输出的追零输出值予以填充。
缓慢刷新填充操作模式,将数组里面的追零输出值逐一往前传递。
滑动平均滤波,把两种填充操作模式进行结合,将一个滤波处理周期内先运行M(M为大于或等于2的自然数)次缓慢刷新填充操作,再执行Q(Q为大于或等于2的自然数)次快速刷新填充操作。每次填充完毕后,都对数组内的N个元素求平均数,并将平均数输出至加权滤波。
加权滤波,用于在不同的变化过程中对角度裸值赋予不同权重值。
加权滤波,若待测悬臂梁构件为稳定状态时,削弱新采集的角度裸值权重;若梁构件为非稳定状态时,加强新采集的角度裸值权重。
加权滤波,先判断是否达到内部分度数的稳定状态。
内部分度数的稳定状态,为新输入的角度裸值与上一个滤波输出的角度视数相差不超过一个设定的范围。
若达到内部分度数的稳定状态,其滤波计算式为:滤波输出值=(新输入的角度裸值*1+上一个滤波输出角度视数*3)/4;上式中,新输入的角度裸值权重为25%。
若未达到内部分度数的稳定状态,其滤波计算式是:滤波输出值=(新输入的角度裸值*3+上一个滤波输出角度视数*1)/4;上式中,新输入的角度裸值权重为75%。
角度变化范围处理函数,用于将新输入的角度裸值与上一次的滤波输出值做比较,根据变化范围区间来判断角度值是否稳定,并确定内部分度数达到稳定状态时所需滤波次数。
零点处理,用于修正待测悬臂梁在工作中引起的角度零点偏差,解决以下情况导致的测量偏差:1、待测悬臂梁在每一次受力形变再返回静态时的形状改变,导致角度传感器采集待测悬臂梁在静态时的角度零点值都会与标定时的标定零点值有偏差;2、待测悬臂梁由于长期处于受力状态的机械损耗,导致待测悬臂梁在静态时实际的角度零点值与标定时的标定零点值偏差的逐渐变大。
零点处理,包括:零点修正、自动追零。
零点修正,包括三个功能:修正标定零点差值、修正累计零点、过滤角度差值。
修正标定零点,用于将每次采集的角度零点值都减去标定时的标定零点值。
修正累计零点,用于将追零后所产生的追零量算入角度裸值中,改变待测悬臂梁静态时的角度零点值。
过滤角度差值,用于通过计算悬臂梁自由端的端点与悬臂梁固定端的端点角度值相对变化值,来检测待测悬臂梁的弯曲形变,使待测悬臂梁不受其自身倾斜的影响。处理待测悬臂梁自身倾斜的方法为:以标定时的自由端端点的角度值判定为水平放置角度值,当角度值有变化角θ时,测量形变时的角度值Δθ是减去变化角θ的输出。
自动追零,用于将在追零范围内的当前角度值,按照设定的时间频率进行追零运算。若当前角度值大于零点值时,追零量自增,反之则追零量自减。当前角度值的变化在设定的范围内时,为稳定。
自动追零流程如下:
Z1,判断是否达到追零跟踪时间,如果达到则进入Z2,否则跳出自动追零程序;
Z2,判断当前角度值是否稳定,如果稳定则进入Z3,否则跳出自动追零程序;
Z3,判断当前角度值是否小于或等于追零范围,如果小于或等于进入Z4,否则跳出自动追零程序;
Z4,判断当前零点是否大于最小差值,如果大于进入Z6,否则进入Z5;
Z5,追掉末值,并完成自动追零程序;
Z6,判断当前角度值是否为正,如果为正就进入Z8,否则进入Z7;
Z7,追零量自减,并完成自动追零程序;
Z8,追零量自增,并完成自动追零程序。
追掉末值,用于将当前角度值归零。
零点处理执行后,将零点处理后的角度值转换成内部分度数,公式为:CntIn_Cur=Angle/32768*180°,式中Angle代表滤波输出后的角度值,CntIn_Cur代表内部分度数。
分度数处理,用于避免在待测悬臂梁受力变形抖动现象造成的测量数据不稳定。
分度数处理,通过判断分视值所在的变化范围,并根据所在的变化范围,进行滤波运算。
分视值,内部分度数与分度数处理输出值的差值。
分度数处理,设置3个分度数变化临界值:3C、6C和10C。C为设置的分度数变化的基本量(C为0.5°的正整数倍),3C临界点就代表3倍基本量的值,6C临界点就代表6倍基本量的值,10C临界点就代表10倍基本量的值。
分度数处理程序流程如下:
N1、判断分视值是否小于3C,如果是则跳出分度数处理程序,否则进入N2;
N2、判断分视值是否小于6C,如果是则进入N2-1,否则进入N3;
N2-1、将内部分度数累加8次,并求出8次的平均值作为分度数处理的输出;
N3、判断分视值是否小于10C,如果是则进入N3-1,否则进入N3-2;
N3-1、将内部分度数累加15次,并求出15次的平均值作为分度数处理的输出;
N3-2、将内部分度数累加3次,并求出3次的平均值作为分度数处理的输出。
(2)在本实施例中,建立一个悬臂梁形变检测数学模型,悬臂梁形变检测数学模型如下:
模型需要监测的参数有:梁在自由端受力大小Fp与梁的最大挠度值wmax。
梁在自由端受力大小Fp的计算式为①式:
梁的最大挠度值wmax的计算式为②式:
悬臂梁结构模型的挠曲线方程为③式:
在公式①、②和③中,Δθ代表从滤波函数输出的角度值。L为梁的长度,EI为梁的弯曲刚度,由标定模式中确定的EI值所得。
待测悬臂梁形变检测模型是仅受单点作用在梁自由端的合力所发生弯曲形变模型。以梁的轴线所在平面,以梁的固定支点为原点O,以梁水平伸展方向为X轴正半轴方向建立平面坐标系XOW。受到作用在梁臂自由端垂直X轴向下的力Fp发生弯曲变形。θB为悬臂梁梁臂自由端端点的切线方向与悬臂梁静止时的夹角。B为合力点到梁自由端端点的距离值。
其中,悬臂梁的弯矩M(x)为④式:
M(x)=Fp*(L-x) ④式
悬臂梁的截面转角和挠曲线方程为⑤式:
对于公式④和⑤式,当x=L时,θ(x)和w(x)有最大值:
通过公式⑦和⑧式,便可求出压力Fp、wmax的θB的关系式:
(3)本实施例的悬臂梁弯曲形变实时监测装置,根据步骤(2)的数学模型,在屏幕上显示用动画模拟形变情况,动画绘制方法如下:
绘制出待测悬臂梁形变模拟动画,用于在嵌入式端和电脑端观察梁受力形变情况。形变模拟动画由角度传感器传回的实时角度值,经过滤波处理输出后,代入形变检测数学模型,最终将计算出的结果转换成绘制点,并在屏幕上绘制待测悬臂梁受力变形轴线的实时模拟动画。
动画在屏幕上显示,屏幕包括:显示模块或电脑的显示器。
梁轴线形变模拟动画构建步骤:1)建立两个坐标系:梁坐标系xoy与绘制坐标系x`o`y`,梁坐标系的o点与绘制坐标系o`点重合,梁坐标系用于表示梁计算中所用到的坐标系参数,绘制坐标系用于表示屏幕上绘制图形所用到的绘制坐标点;2)确定动画基本绘制点数量。通过梁挠曲线方程计算出每个绘制点在屏幕上的显示坐标;3)对模拟动画的每个绘制点进行分段绘制。
在屏幕上显示由挠曲线方程计算出来的模拟动画曲线,需要将计算结果转换成屏幕上的坐标点,该转换需要主要用到以下几个重要变量:
模拟动画曲线绘制点数量DRAW_DOP,该数量不小于3;
绘制区x`轴长度graph_size,该长度不小于30,且为模拟动画曲线绘制点数量DRAW_DOP的整数倍;
梁坐标系中x轴分量点数组beam_x[],括号内为0到DRAW_DOP-1的DRAW_DOP个整数;beam_x[]数组存放均匀分布在梁轴线上的点在梁坐标系中的x轴坐标,其每一个数组元素与前一个元素差值都为梁长度的DRAW_DOP分之一。
绘制坐标系x`轴分量点数组draw_x[],括号内为0到DRAW_DOP-1的DRAW_DOP个整数;
绘制坐标系与梁坐标系y轴缩放比draw_scale_y;
存储绘制点y`轴坐标值数组lcd_y[],括号内为0到DRAW_DOP-1的DRAW_DOP个整数;
graph_size变量为屏幕上动画绘制区域的x`轴长度,beam_x[]数组存放均匀分布在梁轴线上的点在梁坐标系中的x轴坐标,其每一个数组元素与前一个元素差值都为梁长度的DRAW_DOP分之一。数组beam_x[]的元素从原点开始计算,每一个元素与上一个元素的对应式为beam_x[i]=length/DRAW_DOP+beam_x[i-1];
其中,length为梁的长度,i取值区间为[1,DRAW_DOP-1]。在计算中,将beam_x[]里的元素逐一代入draw_x[]数组存放均匀分布在绘制区域的x`轴坐标点,即将绘制区域的x`轴长度均匀分成DRAW_DOP份,每份分割点对应在x`轴上的坐标点。draw_x[]数组的元素从坐标原点开始计算,每一个元素与上一个元素的对应式为draw_x[i]=graph_size/DRAW_DOP+draw_x[i-1];
draw_scale_y变量为绘制坐标系与梁坐标系y轴缩放比,其作用为按比例显示梁坐标系中梁的挠度在绘制坐标系上的绘制坐标点。draw_scale_y的计算公式为:
draw_scale_y=graph_size/length;
lcd_y[]数组存放的是绘制坐标系中绘制点y`轴坐标值,lcd_y[]数组共有DRAW_DOP个元素,每个元素与该点对应在梁坐标轴中的挠度值都有倍数draw_scale_y的关系。lcd_y[]数组第i个元素的计算公式为lcd_y[i]=bend(beam_x[i])*draw_scale_y;
根据上述参数的运用和计算,便可求出在绘制坐标系中的绘制点坐标,并进行分段画线操作,可得出梁轴线的模拟动画曲线,分段划线的方式为:对每两两相邻的绘制点采用直线段连接。形变模拟动画曲线绘制流程如下所示:
H1、清除绘制区图形;
H2、逐一计算各绘制点在屏幕上的坐标值;
H3、分段画线操作。
悬臂梁弯曲形变实时监测方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0