









专利摘要
一种板形工件包边装置馈带机构的带压传感器,由弹臂、左压电片、右压电片构成。弹臂的首端通过调节柄的可调松紧轴结构装配在摇臂的尾端。左压电片作为弹臂的受压左凸形变传感器件,为变电阻型应变片制成,以应变片专用胶紧密贴敷于弹臂的左侧面。右压电片作为弹臂的受压右凹形变传感器件,为变电阻型应变片制成,以应变片专用胶紧密贴敷于弹臂的右侧面。左压电片的两引线之一与右压电片的两引线之一连接,左压电片和右压电片的另一引线分别与压力信号线的两根连接。
权利要求
1.一种板形工件包边装置馈带机构的带压传感器,由弹臂、左压电片、右压电片构成,其特征是:
弹臂的首端通过调节柄的可调松紧轴结构装配在摇臂的尾端;
左压电片作为弹臂的受压左凸形变传感器件,为变电阻型应变片制成,以应变片专用胶紧密贴敷于弹臂的左侧面;右压电片作为弹臂的受压右凹形变传感器件,为变电阻型应变片制成,以应变片专用胶紧密贴敷于弹臂的右侧面;左压电片的两引线之一与右压电片的两引线之一连接,左压电片和右压电片的另一引线分别与压力信号线的两根连接;
左压电片电阻Rp1与右压电片电阻Rp2串联,左压电片电阻Rp1与右压电片电阻Rp2的串联点连接到系统工作电源正极端EP,左压电片电阻Rp1与右压电片电阻Rp2的串联支路两端分别作为左信号引出端a和右信号引出端b;左平衡电阻RBP1与右平衡电阻RBP2串联,左平衡电阻RBP1与右平衡电阻RBP2的串联点接地,左平衡电阻RBP1与右平衡电阻RBP2的串联支路跨接在左信号引出端a和右信号引出端b之间;弹臂反馈分压电阻RBP3的一端与弹臂靠紧信号运放ABP的反相输入端连接,另一端接地;弹臂靠紧信号运放ABP的反相输入端连接到右信号引出端b,正相输入端连接到左信号引出端a;弹臂反馈电阻RBPf跨接在弹臂靠紧信号运放ABP的反相输入端与弹臂靠紧信号运放ABP输出端之间;弹臂靠紧信号运放ABP的正极电源端连接到系统工作电源正极端EP,负极电源端连接到系统工作电源负极端EN;弹臂信号光耦LCB的输入端正极通过弹臂光耦限流电阻RBP4与弹臂靠紧信号运放ABP的输出端连接,弹臂信号光耦LCB的输入端负极连接到系统工作电源负极端EN;弹臂信号光耦LCB的输出端正极作为弹臂靠紧信号接线端PBP,弹臂信号光耦LCB的输出端负极接地;弹臂靠紧执行运放ABF的正相输入端通过弹臂靠紧信号耦合电阻RBF1与弹臂靠紧信号运放ABP的输出端连接;弹臂靠紧执行运放ABF的反相输入端通过反馈分压电阻RBF2接地;通过反馈电阻RBF3与弹臂靠紧执行运放ABF的输出端连接;弹臂靠紧执行运放ABF的电源正极端连接到系统工作电源正极端EP;弹臂靠紧执行运放ABF的电源负极端连接到系统工作电源负极端EN;弹臂续流二极管DBF正极端与弹臂靠紧执行运放ABF的输出端连接,负极端连接到系统工作电源正极端EP;弹臂靠紧执行继电器JBF的电磁线圈跨接在系统工作电源正极端EP和弹臂靠紧执行运放ABF的输出端之间。
2.根据权利要求1所述的板形工件包边装置馈带机构的带压传感器,其特征是:
弹臂靠紧信号接线端PBP连接到控制器芯片U的PD1引脚;控制电路工作指示LED DP的正极通过控制电路工作指示电阻RP连接到系统控制电路电源正极端E,控制电路工作指示LEDDP的负极连接到控制器芯片U的PD0引脚;下料臂逆变触发模块Gβ右框中对应于上料臂逆变触发模块Gα左框中的A相正极触发信号下拉电阻RAP0的一端、B相正极触发信号下拉电阻RBP0的一端、C相正极触发信号下拉电阻RCP0的一端、A相负极触发信号下拉电阻RAN0的一端、B相负极触发信号下拉电阻RBN0的一端和C相负极触发信号下拉电阻RCN0的一端分别连接到控制器芯片U的PD2、PD3、PD4、PD5、PD6和PD7引脚;控制系统启动键KM的一端通过启动信号缓冲电阻RKM连接到控制器芯片U的PA0引脚,另一端接地;启动信号缓冲电容CKM跨接在控制器芯片U的PA0引脚与地之间;主电机转角反馈信号接线端Pn通过转角反馈信号耦合电阻RM连接到控制器芯片U的PA1引脚;上料臂摆角反馈信号接线端Pα通过上料臂摆角反馈信号耦合电阻RPF连接到控制器芯片U的PA2引脚;下料臂摆角反馈信号接线端Pβ通过下料臂摆角反馈信号耦合电阻RPB连接到控制器芯片U的PA3引脚;上料杆上缩到位信号光耦LCTF的输出端正极连接到控制器芯片U的PA4引脚,上料杆上缩到位信号光耦LCTF的输出端负极接地;下料杆上缩到位信号光耦LCTB的输出端正极连接到控制器芯片U的PA5引脚,下料杆上缩到位信号光耦LCTB的输出端负极接地;上料杆触压信号接线端PSF连接到控制器芯片U的PA6引脚;下料杆触压信号接线端PSB连接到控制器芯片U的PA7引脚;第一自激电容Cp1跨接在控制器芯片U的XTAL1引脚和地之间;第二自激电容Cp2跨接在控制器芯片U的XTAL2引脚和地之间;晶振Cf跨接在控制器芯片U的XTAL1引脚和XTAL2引脚之间;控制器芯片U的VCC引脚连接到系统控制电路电源正极端E;上料臂摆角取、放料位信号接线端Pα连接到控制器芯片U的PC7引脚;下料臂摆角取、放料位信号接线端Pβ连接到控制器芯片U的PA6引脚;A相正极触发信号下拉电阻RAP0的一端、B相正极触发信号下拉电阻RBP0的一端、C相正极触发信号下拉电阻的一端、A相负极触发信号下拉电阻的一端、B相负极触发信号下拉电阻的一端和C相负极触发信号下拉电阻的一端分别连接到控制器芯片U的PC5、PC4、PC3、PC2、PC1和PC0引脚,A相正极触发信号下拉电阻RAP0的另一端、B相正极触发信号下拉电阻RBP0的另一端、C相正极触发信号下拉电阻的另一端、A相负极触发信号下拉电阻的另一端、B相负极触发信号下拉电阻的另一端和C相负极触发信号下拉电阻的另一端分别连接到A相正驱动光耦LCAP、B相正驱动光耦LCBP、C相正驱动光耦LCCP、A相负驱动光耦LCAN、B相负驱动光耦LCBN和C相负驱动光耦LCCN的输入端正极;A相正驱动光耦LCAP、B相正驱动光耦LCBP、C相正驱动光耦LCCP、A相负驱动光耦LCAN、B相负驱动光耦LCBN和C相负驱动光耦LCCN的输入端负极均接地;主电机转到3位信号接线端Pn3为、主电机转到2位信号接线端Pn2、主电机转到1位信号接线端Pn1和主电机转角控制信号接线端PnC分别连接到控制器芯片U的PB7、PB6、PB5和PB4引脚;馈带机构操控信号光耦LCPW的输入端正极、下料杆上缩操控信号光耦LCPTB的输入端正极、上料杆下伸操控信号光耦LCNTF的输入端正极和上料杆上缩操控信号光耦LCPTF的输入端正极分别通过馈带机构操控信号下拉电阻RPW、下料杆上缩操控信号下拉电阻RRPB、上料杆下伸操控信号下拉电阻RNTF和上料杆上缩操控信号下拉电阻RPTF连接到控制器芯片U的PB3、PB2、PB1和PB0引脚;重置信号上拉电阻RR1跨接在系统控制电路电源正极端E和控制器芯片U的
说明书
技术领域
本发明涉及一种对平板形工件进行侧边包贴的方法。
背景技术
在许多平板形产品生产线中,都有一道对平板形工件进行侧边包贴的工序,尤其是电路板生产企业。这类生产工序是:用专用胶带将平板形工件全周边包贴起来。目前该类工序均为人工完成,其结果是包贴状态一致性差,且有不等部位的偏贴、褶皱、漏隙等缺陷。对于通常的大、重板件,人工操作困难更大。这对于相关产品生产线是个严重影响流程的瓶颈,掣肘整个生产过程自动化。这就亟待研发一种能够保证包贴状态一致性且取代重体力人工操作的自动化方法,以实现整个生产过程的自动化。
发明内容
为解决包贴状态一致性差,偏贴、褶皱、漏隙等缺陷和人工包贴操作笨重等困难,本发明提供一种板形工件包边装置馈带机构的带压传感器,由弹臂、左压电片、右压电片构成。弹臂的首端通过调节柄的可调松紧轴结构装配在摇臂的尾端。左压电片作为弹臂的受压左凸形变传感器件,为变电阻型应变片制成,以应变片专用胶紧密贴敷于弹臂的左侧面。右压电片作为弹臂的受压右凹形变传感器件,为变电阻型应变片制成,以应变片专用胶紧密贴敷于弹臂的右侧面。左压电片的两引线之一与右压电片的两引线之一连接,左压电片和右压电片的另一引线分别与压力信号线的两根连接。
本发明解决其技术问题所采用的技术方案是:
板形工件包边装置馈带机构的带压传感器由弹臂、左压电片、右压电片构成。
弹臂的首端通过调节柄的可调松紧轴结构装配在摇臂的尾端。
左压电片作为弹臂的受压左凸形变传感器件,为变电阻型应变片制成,以应变片专用胶紧密贴敷于弹臂的左侧面。右压电片作为弹臂的受压右凹形变传感器件,为变电阻型应变片制成,以应变片专用胶紧密贴敷于弹臂的右侧面。左压电片的两引线之一与右压电片的两引线之一连接,左压电片和右压电片的另一引线分别与压力信号线的两根连接。
胶带带压信号检测-放大-执行电路图中:左压电片电阻Rp1与右压电片电阻Rp2串联,该串联点连接到系统工作电源正极端EP,该串联支路两端分别作为左信号引出端a和右信号引出端b。左平衡电阻RBP1与右平衡电阻RBP2串联,该串联点接地,该串联支路跨接在左信号引出端a和右信号引出端b之间。弹臂反馈分压电阻RBP3的一端与弹臂靠紧信号运放ABP的反相输入端连接,另一端接地。弹臂靠紧信号运放ABP的反相输入端连接到右信号引出端b,正相输入端连接到左信号引出端a。弹臂反馈电阻RBPf跨接在弹臂靠紧信号运放ABP的反相输入端与弹臂靠紧信号运放ABP输出端之间。弹臂靠紧信号运放ABP的正极电源端连接到系统工作电源正极端EP,负极电源端连接到系统工作电源负极端EN。弹臂信号光耦LCB的输入端正极通过弹臂光耦限流电阻RBP4与弹臂靠紧信号运放ABP的输出端连接,弹臂信号光耦LCB的输入端负极连接到系统工作电源负极端EN;弹臂信号光耦LCB的输出端正极作为弹臂靠紧信号接线端PBP,弹臂信号光耦LCB的输出端负极接地。弹臂靠紧执行运放ABF的正相输入端通过弹臂靠紧信号耦合电阻RBF1与弹臂靠紧信号运放ABP的输出端连接。弹臂靠紧执行运放ABF的反相输入端通过反馈分压电阻RBF2接地;通过反馈电阻RBF3与弹臂靠紧执行运放ABF的输出端连接。弹臂靠紧执行运放ABF的电源正极端连接到系统工作电源正极端EP;弹臂靠紧执行运放ABF的电源负极端连接到系统工作电源负极端EN。弹臂续流二极管DBF正极端与弹臂靠紧执行运放ABF的输出端连接,负极端连接到系统工作电源正极端EP。弹臂靠紧执行继电器JBF的电磁线圈跨接在系统工作电源正极端EP和弹臂靠紧执行运放ABF的输出端之间。
本发明的有益效果是:一种可以高效支持并实现平板形工件侧边包贴的设备成套系统。它使得平板形工件侧边包贴在较宽的规格范围可设定、调节,并能在多给定值下保持稳定,并克服了人工操作不可靠、不可控等缺陷。特别对于批量包贴,能快速完成,远远超过人工工作速度;而且同时大大节省了人工、人力。系统以紧凑、简洁的结构实现了平板形工件侧边包贴,其控制系统结构化、系统化程度高,易于调整;极易形成性价比高的成套设备系统。整体易于批量生产;系统维护、维修简便易行。
附图说明
下面结合附图和实施例对本发明进一步说明。
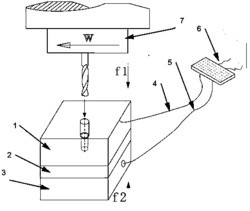
图1是本发明的一个实施例—板形工件包边方法俯视示意图。
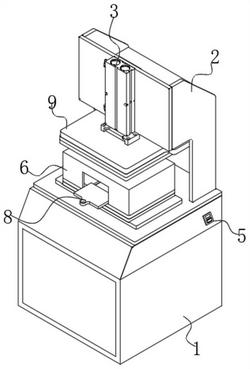
图2是板形工件包边装置结构主视图。
图3是板形工件包边装置结构俯视图。
图4是板形工件包边装置结构的A-A向剖视图。
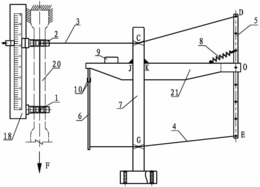
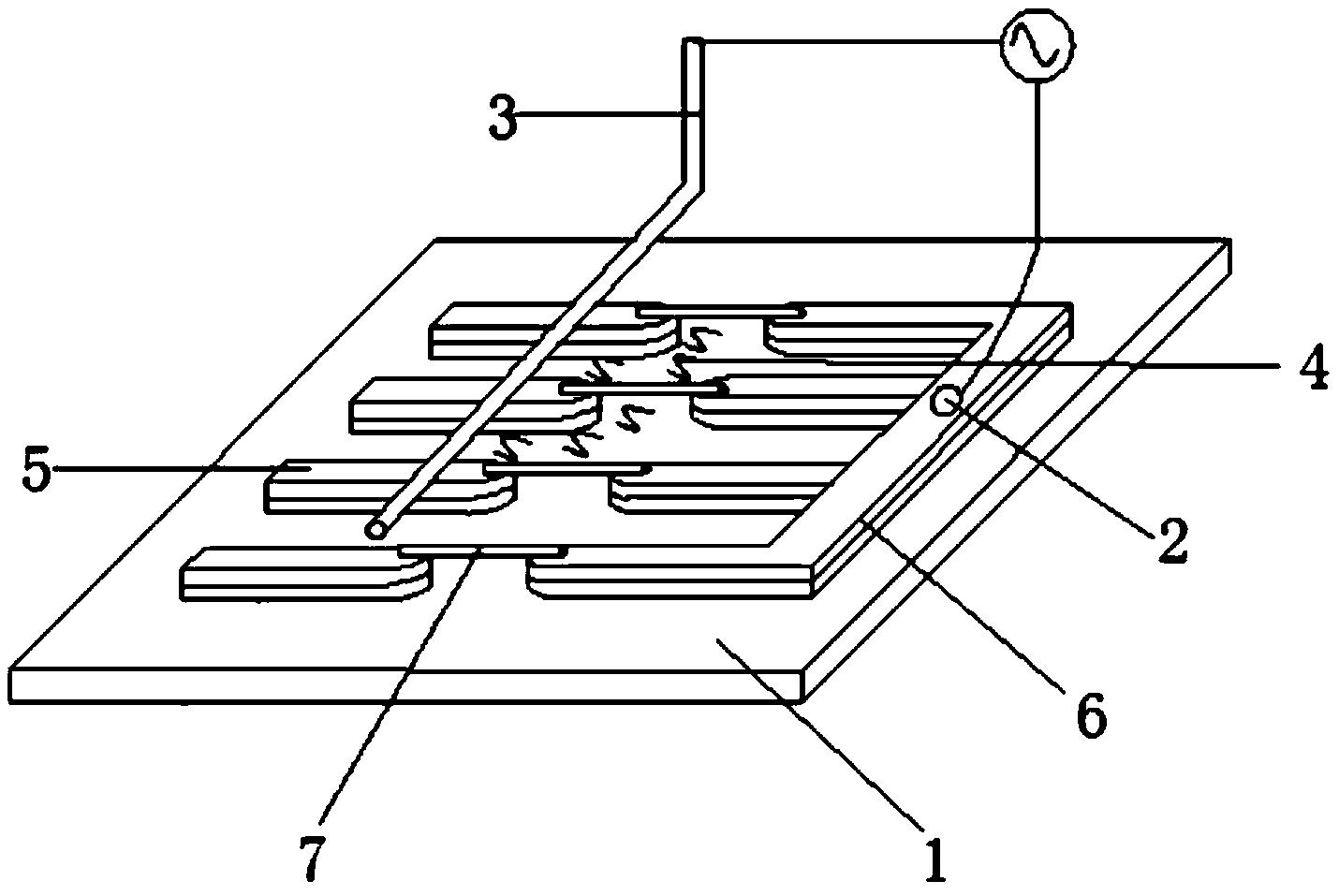
图5是板形工件包边装置的馈带机构俯视图。
图6是馈带机构的B-B向结构剖视图。
图7是胶带带压信号检测-放大-执行电路图。
图8是板形工件包边系统操作、控制电路图。
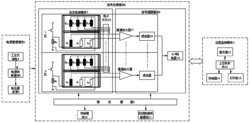
图9是系统工作电源变换电路图。
在图1~5中:1.基台,2.下料机构,3.包成件,4.下料车,5.上料车,6.待包件,7.上料机构,8.馈带机构,9.工件。α00为上料臂摆角取料位,α10为上料臂摆角放料位;β00为下料臂摆角放料位,β10为下料臂摆角取料位。
在图2~6中:1.1.旋座,1.2.测数器,1.3.主电机,1.4.操作盘,2.1.下料气管,2.2.下料臂,2.3.下料柱,2.4.下料伸缩杆,2.5.下料,7.1.上料气管,7.2.上料臂,7.3.上料柱,7.4.上料伸缩杆,7.5.上料,8.1.导带轮,8.2托带轴,8.3.胶带卷,8.4.托带盘,8.5.端坐盘,8.6.摇臂电缆,8.7.摇臂电机,8.8.摇臂,8.9.弹臂,8.10.连臂,8.11.切头驱动线圈,8.12.连杆,8.13.电热电缆,8.14.切头,8.15.切刀。
在图3~6中:2.6.下料杆管线孔道,2.7.下料管线槽;7.6.上料杆管线孔道,7.7.上料管线槽;8.10.1.牵轴,8.10.2.柔臂,8.10.3.摇轴,8.11.切头驱动线圈,8.16.牵带轮,8.17.调节柄,8.18.压带轮,8.19.胶带;8.12.1.基铰轴,8.12.2.动铰轴,
在图4~6中:2.3.1.上料柱管线孔道,2.8.下料线缆束;7.3.1.上料柱管线孔道,7.6.上料杆管线孔道,7.8.上料线缆束。
在图5~6中:8.1.1.导轴,8.18.1.压轴。
在图6~8中:8.9.1.左压电片,8.9.2.右压电片。
在图7~9中:Rp1为左压电片电阻,Rp2为右压电片电阻,RBP1为左平衡电阻,RBP2为右平衡电阻,RBP3为弹臂反馈分压电阻,ABP为弹臂靠紧信号运放,RBPf为弹臂反馈电阻,LCS为弹臂信号光耦,RBP4为弹臂光耦限流电阻;LCB为弹臂信号光耦,PBP为弹臂靠紧信号接线端;DTBP为胶带带压信号检测-放大环节;RBF1为弹臂靠紧信号耦合电阻,RBF2为反馈分压电阻,ABF为弹臂靠紧执行运放,RBF3为反馈电阻,DBF为弹臂续流二极管,JBF为弹臂靠紧执行继电器。
在图8~9中:RP为控制电路工作指示电阻,DP为控制电路工作指示LED;KM为控制系统启动键,RKM为启动信号缓冲电阻,CKM为启动信号缓冲电容;Sn为主电机转角检测-反馈环节,Pn为主电机转角反馈信号接线端;RM为转角反馈信号耦合电阻,RPF为上料臂摆角反馈信号耦合电阻,RPB为下料臂摆角反馈信号耦合电阻;Cp1为第一自激电容,Cp2为第二自激电容,Cf为晶振;U为控制器芯片;Pα为上料臂摆角取、放料位信号接线端,PβC为下料臂摆角取、放料位信号接线端;RAP0为A相正极触发信号下拉电阻,RBP0为B相正极触发信号下拉电阻,RCP0为C相正极触发信号下拉电阻,RAN0为A相负极触发信号下拉电阻,RBN0为B相负极触发信号下拉电阻,RCN0为C相负极触发信号下拉电阻;Pn3为主电机转到3位信号接线端,Pn2为主电机转到2位信号接线端,Pn1为主电机转到1位信号接线端,PnC为主电机转角控制信号接线端;RPW为馈带机构操控信号下拉电阻,RPW为下料杆操控信号下拉电阻,RNTF为上料杆下伸操控信号下拉电阻,RPTF为上料杆上缩操控信号下拉电阻;LCPW为馈带机构操控信号光耦,LCPTF为上料杆上缩操控信号光耦,LCNTF为上料杆下伸操控信号光耦;RR1为重置信号上拉电阻,RR2为重置信号缓冲电阻,CR为重置信号缓冲电容,KR为控制器重置按键。
在图9中:KP电源开关,Br为三相整流桥,CP1为第一滤波电容,CP2为吸收电容,RP1为吸收电阻,DP0为吸收二极管,UP为PWM控制器芯片,CP3为第二滤波电容,CP4为缓冲电容,RP2为分压电阻,LCP为反馈光耦器件;TrP为输出变压器,W1为输出变压器原绕组,W2为输出变压器检测绕组,RP3为限流电阻,DP1为整流二极管,W3为输出变压器第一副绕组,W4为输出变压器第二绕组,W5为输出变压器第三绕组;DP2为系统控制工作电源正输出整流二极管,CP5为系统控制工作电源正输出第一滤波电容,LP1为系统控制工作电源正输出滤波电感,CP7为系统控制工作电源正输出第二滤波电容;DP3为系统工作电源正输出整流二极管,CP8为系统工作电源正输出第一滤波电容,LP2为系统工作电源正输出滤波电感,CP9为系统工作电源正输出第二滤波电容,DP4为系统工作电源负输出整流二极管,CP10为负输出第一滤波电容,LP3为系统工作电源负输出滤波电感,CP11为系统工作电源正输出第二滤波电容;RP4为反馈限流电阻,RP5为反馈分压第一电阻,CP9为自激吸收电容,UP0为基准电压源器件,RP6为反馈分压第二电阻。
具体实施方式
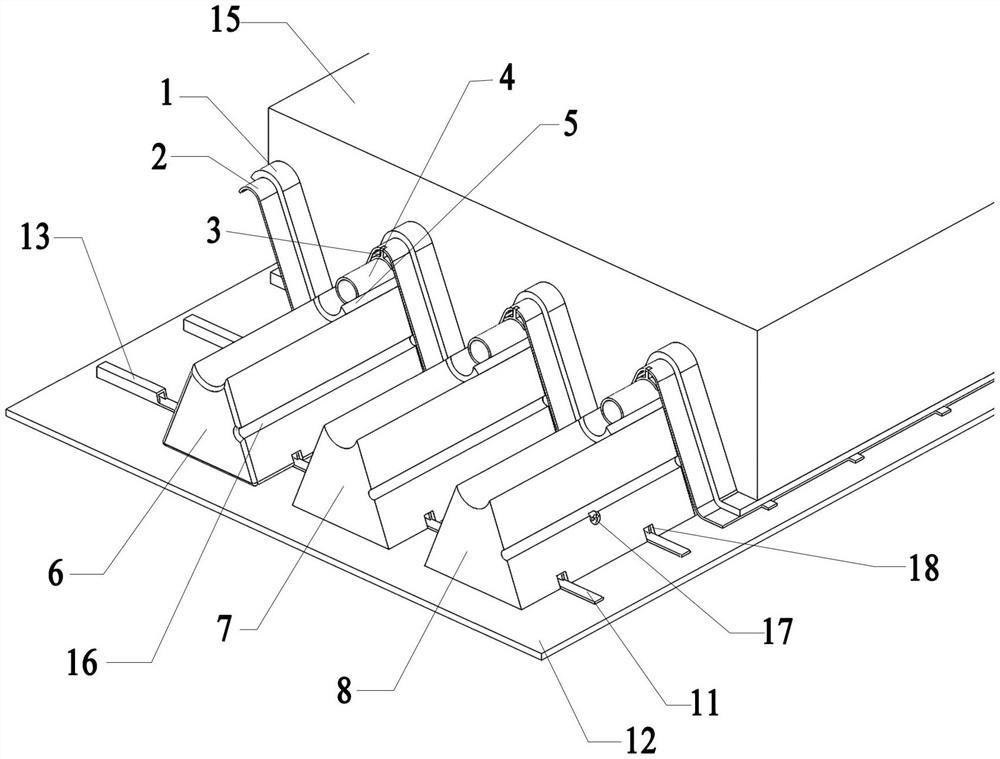
在图1所示的本发明的一个实施例—板形工件包边方法俯视示意图中:基台1作为系统总体装置的主体工作台、机箱体和工作、承载面,坐落于工作场中间偏右处。下料机构2作为系统装置工作的包成件抓持、转移、下放机构,装配于基台1上面的左端。包成件3作为系统装置工作的对象—已包边完成工件,由下料机构2抓持、转移、下放,依次置于下料车4内。下料车4作为承载、运送包成件3的转运设备,暂停于基台1的左侧,处于待装载定位位置。上料车5作为承载、运送待包件6的转运设备,暂停于基台1的外侧,处于待卸载定位位置。待包件6作为系统装置工作的对象—待包边工件,依次由上料机构7抓持、转移、下放,按压于基台1上面中部的工作位。上料机构7作为系统装置工作的待包件抓持、转移、下放、按压机构,装配于基台1上面的右外端。馈带机构8作为包边胶带的馈送机构,装配于基台1上面的上料机构7右侧。被包件9作为正在被包边的工件,由上料机构7抓持、转移、下放,按压于基台1上面中部的工作位。
在图1所示的本发明的一个实施例—板形工件包边方法俯视示意图和图2所示的板形工件包边装置结构主视图中:
基台1为系统总体装置的主体工作台、机箱体和工作、承载面。旋座1.1作为承载并带动被包件9旋转的机件,通过其配轴孔与主轴,即主电机1.3的输出轴紧固配接。测数器1.2作为感知、检测、传送旋座1.1转角的器件,根植安装于基台1上面的主电机1.3右侧,旋座1.1下方,其上端与旋座1.1下面留有3mm距离。主电机1.3作为系统装置工作的主动力和系统执行器件,嵌装于基台1的中部偏左位,其输出轴与旋座1.1配接。操作盘1.4作为系统工作的人机交互键盘操作面,以抽拉结构内嵌装配于基台1内侧偏右的槽室内。
下料气管2.1作为为下料2.5取得负压的抽气管线,引自下料2.5,穿过下料伸缩杆2.4,再穿入下料臂2.2、下料柱2.3和基台1,引到抽气系统。下料臂2.2作为下料机构2的转移运动悬臂梁机构,首端作为转轴端装配于的下料柱2.3顶部,尾端作为工作端装配有下料伸缩杆2.4。下料柱2.3作为下料机构2的主支撑结构,上端装配下料臂2.2,下端安装于基台1的左端中部。下料伸缩杆2.4作为下料机构2的提起、下放机构,装配于下料臂2.2的工作端,下端装配下料2.5。下料2.5作为下料机构2的抓持、转移、下放的终端机件,为柔性材料伞形机构,以其顶端装配于下料伸缩杆2.4的下端。
上料气管7.1作为为上料7.5取得负压的抽气管线,引自上料7.5,穿过上料伸缩杆7.4,再穿入上料臂7.2、上料柱7.3和基台1,引到抽气系统。上料臂7.2作为上料机构7的转移运动悬臂梁机构,为铁质材料制成,其首端作为转轴端装配于的上料柱7.3顶部,尾端作为工作端装配有上料伸缩杆7.4。上料柱7.3作为上料机构7的主支撑机构,上端装配上料臂7.2,上端安装于基台1的右端外部。上料伸缩杆7.4作为上料机构7的提起、下放、按压机构,装配于上料臂7.2的工作端,下端装配上料7.5。上料7.5作为上料机构7的抓持、转移、下放按压的终端机件,为柔性材料伞形机构,以其顶端装配于上料伸缩杆7.4的下端。
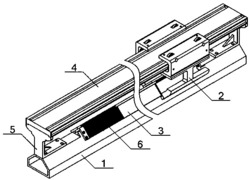
导带轮8.1作为导引包边胶带的倒转机构,为车有轮边凹槽的轮盘件,装配于端座盘8.5的左内端。托带轴8.2作为馈带机构的定位轴,为托带盘8.4的中轴凸出部,用于定位套配胶带卷8.3,与胶带卷8.3的套配孔构成转动配合。胶带卷8.3作为包边所用胶带材料的商品件,为带有中轴套配孔的圆盘结构,以套配孔套配托带轴8.2,平放在托带盘8.4的上面。托带盘8.4作为定位承托胶带卷8.3的部件,为制有托带轴8.2的圆盘,圆盘体连同托带轴8.2一体的中轴位,套制有上端不透的轴套孔;通过该轴套孔,托带盘8.4与端座盘8.5构成转动配合。端座盘8.5作为馈带机构8的终端基盘,外侧中位向外延伸出弹臂8.9,上面右内角位装配托带盘8.4,上面左内角位装配导带轮8.1,下面中部偏左外位安装切头驱动线圈8.11。摇臂电缆8.6作为电热电缆8.13和弹臂8.9压力信号线的线缆束,从基台1的上料柱7.3和摇臂电机8.7之间内侧位引出,引入摇臂8.8的线缆孔道。摇臂电机8.7作为馈带机构8的驱动器件和系统执行终端,安装于基台1的右外端,即上料柱7.3右侧。摇臂8.8作为馈带机构8的驱动主臂,首端紧固装配于摇臂电机8.7的输出轴端,尾端装配弹臂8.9和连臂8.10。弹臂8.9作为馈带机构8的弹性驱动次臂,首端装配在摇臂8.8的尾端,尾端与端座盘8.5连为一体。连臂8.10作为馈带机构8的分力驱动次臂,首端装配在摇臂8.8的尾端,尾端与连杆8.12的尾端铰链配合。切头驱动线圈8.11作为切带机构的电磁驱动器件和系统执行终端,安装于端座盘8.5下面中部的偏左外位。连杆8.12作为馈带机构8的分力转向摇臂,首端铰链装配在端座盘8.5左内侧的下方,基台1的内边沿上面,操作盘1.4槽室的紧右侧。电热电缆8.13作为切刀8.15的电热驱动线缆,从摇臂8.8的线缆孔道尾口引出,下伴贴敷弹臂8.9、端座盘8.5,沿切头驱动线圈8.11的外侧引入切头8.14。切头8.14作为切刀8.15的动作摆臂,尾端上面安装切刀8.15,下面引入电热电缆8.13并支撑电热电缆8.13与切刀8.15的电气连接。切刀8.15作为切割胶带的工作结构,由电热丝裹绕支撑主体形成,电热丝的两端穿过切头8.14与电热电缆8.13的两端分别连接;切刀8.15的支撑主体由耐热绝缘材料制成,以其根部装配于切头8.14的尾端。
在图1所示的本发明的一个实施例—板形工件包边方法俯视示意图、图2所示的板形工件包边装置结构主视图和图3所示的板形工件包边装置结构俯视图中:
基台1为系统总体装置的主体工作台、机箱体和工作、承载面。操作盘1.4以抽拉结构内嵌装配于基台1内侧曲弧边偏右的槽室内,可以向内偏左向拉出。
下料气管2.1引自下料2.5,穿过下料伸缩杆2.4、下料臂2.2,从下料管线槽2.7的左口穿出,再穿入下料伸缩杆2.4中轴的下料杆管线孔道2.6,下料柱2.3和基台1,引到抽气系统。下料臂2.2的首端装配于的下料柱2.3顶部,尾端装配有下料伸缩杆2.4,其上顶面中尾部挖有下料管线槽2.7;下料管线槽2.7的首端与下料臂2.2内的下料电缆孔贯通。下料2.5以其顶端装配于下料伸缩杆2.4的下端。下料杆管线孔道2.6作为供下料气管2.1穿行、架箍的通道,套制于下料伸缩杆2.4的中轴位。下料管线槽2.7作为供伸缩抽拉的迂回空间,挖制在下料臂2.2的上顶中尾部,首端与下料臂2.2内的下料电缆孔贯通,尾端与下料臂2.2的上顶面曲面过渡。
上料气管7.1从上料管线槽7.7的首端口穿出,经由上料管线槽7.7,再穿入上料伸缩杆7.4中轴的上料杆管线孔道7.6。上料臂7.2的首端装配于上料柱7.3的顶部,尾端装配有上料伸缩杆7.4,其上顶面中尾部挖有上料管线槽7.7;上料管线槽7.7的首端与上料臂7.2内的上料电缆孔贯通。上料7.5以其顶端装配于上料伸缩杆7.4的上端。上料杆管线孔道7.6作为供上料气管7.1穿行、架箍的通道,套制于上料伸缩杆7.4的中轴位。上料管线槽7.7作为供伸缩抽拉的迂回空间,挖制在上料臂7.2的上顶中尾部,首端与上料臂7.2内的上料电缆孔贯通,尾端与上料臂7.2的上顶面曲面过渡。
导带轮8.1装配于端座盘8.5的左内端。托带轴8.2为托带盘8.4的中轴凸出部,用于定位套配胶带卷8.3,与的轴孔构成松动配合。胶带卷8.3为带有中轴套配孔的圆盘结构,以套配孔套配托带轴8.2,平放在托带盘8.4的上面。端座盘8.5外侧中位向外延伸出弹臂8.9,上面右内角位装配托带盘8.4,以托带轴8.2定位套配胶带卷8.3,上面左内角位装配导带轮8.1,下面中部偏左外位安装切头驱动线圈8.11。摇臂电缆8.6从基台1的上料柱7.3和摇臂电机8.7之间内侧位引出,引入摇臂8.8的线缆孔道。摇臂电机8.7安装于基台1的右外端,即上料柱7.3右侧。摇臂8.8的首端紧固装配于摇臂电机8.7的输出轴端,尾端通过摇轴8.10.3和调节柄8.17的可调松紧轴结构装配弹臂8.9和连臂8.10。弹臂8.9的首端通过摇轴8.10.3和调节柄8.17的可调松紧轴结构装配在摇臂8.8的尾端,尾端与端座盘8.5连为一体。连臂8.10的首端通过摇轴8.10.3和调节柄8.17的可调松紧轴结构装配在摇臂8.8的尾端,尾端通过动铰轴8.12.2与连杆8.12的尾端铰链配合;连臂8.10的尾端向左延伸出柔臂8.10.2。切头驱动线圈8.11安装于端座盘8.5中部偏左外位的窗口下面,其上部嵌入窗口。连杆8.12的首端通过基铰轴8.12.1铰链装配在端座盘8.5左内侧的下方,基台1的内边沿上面,操作盘1.4槽室的紧右侧。切头8.14的尾端上面安装切刀8.15,下面引入电热电缆8.13并支撑电热电缆8.13与切刀8.15的电气连接。切刀8.15电热丝的两端穿过切头8.14与电热电缆8.13的两端分别连接;切刀8.15的支撑主体根部装配于切头8.14的尾端。
牵带轮8.16作为端部牵拉包边胶带8.19的可装卸调换机件,为侧边沿车有轮边凹槽的轮盘件,装配在柔臂8.10.2左端的牵轴8.10.1上,以其轴套与牵轴8.10.1构成转动配合。调节柄8.17作为的手动旋拧调节摇轴8.10.3松紧的机构,为圆环手轮结构,与摇轴8.10.3结构配合,铰结摇臂8.8、弹臂8.9和连臂8.10。压带轮8.18作为将包边胶带8.19压向工件9的辊压机件,为侧边沿车有轮边凹槽的轮盘件,装配在端座盘8.5左外角的上面。胶带8.19作为用来对工件9包边的薄带材料,左侧面为不干胶面,有侧面为净面,通过导带轮8.1从胶带卷8.3拉出。
牵轴8.10.1作为定位装配牵带轮8.16的轴结构,为柔臂8.10.2左端的向上延伸,与牵带轮8.16的轴套构成转动配合。柔臂8.10.2作为为牵带轮8.16提供弹柔性侧压力的臂结构,为翘曲偏板形弹性材料,右端延伸于连臂8.10并通过动铰轴8.12.2与连杆8.12的尾端铰接,左端制有向上延伸的牵轴8.10.1。摇轴8.10.3作为铰结摇臂8.8、弹臂8.9和连臂8.10的轴杆结构,下端制有卡沿用以托卡摇臂8.8,上端套有外螺纹用以与调节柄8.17的内螺纹配合;手动旋拧调节柄8.17即可调节放松或锁紧摇轴8.10.3所铰结的摇臂8.8、弹臂8.9和连臂8.10。
基铰轴8.12.1作为连配连杆8.12的轴杆结构,装配在端座盘8.5左内侧的下方,基台1的内边沿上面,操作盘1.4槽室的紧右侧。动铰轴8.12.2作为铰接连臂8.10与连杆8.12的轴杆结构,上端制有卡冒结构下端配有卡销结构。
在图2所示的板形工件包边装置结构主视图、图3所示的板形工件包边装置结构俯视图和图4所示的板形工件包边装置结构的A-A向剖视图中:
基台1为系统总体装置的主体工作台、机箱体和工作、承载面。旋座1.1通过其配轴孔与主轴,即主电机1.3的输出轴紧固配接,装配于基台1上方的中部稍左位。操作盘1.4以抽拉结构内嵌装配于基台1内侧曲弧边偏右位。
下料气管2.1穿插于下料柱管线孔道2.3.1,引到抽气系统。下料柱2.3下端安装于基台1的左端中部,中轴心套有下料柱管线孔道2.3.1;下料柱管线孔道2.3.1,套制于下料柱2.3的中轴位,以穿插下料气管2.1和下料线缆束2.8。
上料气管7.1穿插于上料柱管线孔道7.3.1,引到抽气系统。上料柱7.3下端安装于基台1的左端中部,中轴心套有上料柱管线孔道7.3.1;上料柱管线孔道7.3.1套制于上料柱7.3的中轴位,以穿插上料气管7.1和上料线缆束7.8。
下料柱管线孔道2.3.1作为供下料气管2.1及所伴敷线缆在下料柱2.3中穿行的通道,镗制与的下料柱2.3中轴位并与下料柱2.3同轴。下料线缆束2.8作为驱动电缆、驱动电缆和信号线的线缆束,在下料柱管线孔道2.3.1中的下料柱2.3段汇聚,伴随下料气管2.1穿插于下料柱管线孔道2.3.1。
上料柱管线孔道7.3.1作为供上料气管7.1及所伴敷线缆在上料柱7.3中穿行的通道,镗制于上料柱7.3中轴位并与上料柱7.3同轴。上料线缆束7.8作为伸缩驱动电缆和上料信号电缆、摆臂驱动电缆和摆臂信号线的线缆束,在上料柱管线孔道7.3.1上端汇聚,伴随上料气管7.1穿插于上料柱管线孔道7.3.1。
导带轮8.1装配于端座盘8.5的左内端。托带轴8.2为托带盘8.4的中轴凸出部,用于定位套配胶带卷8.3,与的轴孔构成松动配合。胶带卷8.3为带有中轴套配孔的圆盘结构,以套配孔套配托带轴8.2,平放在托带盘8.4的上面。端座盘8.5外侧中位向外延伸出弹臂8.9,上面右内角位装配托带盘8.4,以托带轴8.2定位套配胶带卷8.3,上面左内角位装配导带轮8.1,下面中部偏左外位安装切头驱动线圈8.11。摇臂电缆8.6从基台1的上料柱7.3和摇臂电机8.7之间内侧位引出,引入摇臂8.8的线缆孔道。摇臂电机8.7安装于基台1的右外端,即上料柱7.3右侧。摇臂8.8的首端紧固装配于摇臂电机8.7的输出轴端,尾端通过摇轴8.10.3和调节柄8.17的可调松紧轴结构装配弹臂8.9和连臂8.10。弹臂8.9的首端通过摇轴8.10.3和调节柄8.17的可调松紧轴结构装配在摇臂8.8的尾端,尾端与端座盘8.5连为一体。连臂8.10的首端通过摇轴8.10.3和调节柄8.17的可调松紧轴结构装配在摇臂8.8的尾端,尾端通过动铰轴8.12.2与连杆8.12的尾端铰链配合;连臂8.10的尾端向左延伸出柔臂8.10.2。切头驱动线圈8.11装嵌于端座盘8.5中部偏左外位的窗口下。连杆8.12的首端通过基铰轴8.12.1铰链装配在端座盘8.5左内侧的下方,基台1的内边沿上面,操作盘1.4槽室的紧右侧。切头8.14的尾端上面安装切刀8.15。切刀8.15两端穿过切头8.14与电热电缆8.13的两端分别连接。牵带轮8.16为侧边沿车有轮边凹槽的轮盘件,装配在柔臂8.10.2左端的牵轴8.10.1上,以其轴套与牵轴8.10.1构成转动配合。调节柄8.17为圆环手轮结构,与摇轴8.10.3结构配合,铰结摇臂8.8、弹臂8.9和连臂8.10。压带轮8.18为侧边沿车有轮边凹槽的轮盘件,装配在端座盘8.5左外角的上面。柔臂8.10.2为翘曲偏板形弹性材料,右端延伸于连臂8.10并通过动铰轴8.12.2与连杆8.12的尾端铰接,左端制有向上延伸的牵轴8.10.1。
在图5所示的板形工件包边装置的馈带机构俯视图中:
导带轮8.1装配于端座盘8.5上面左内端的导轴8.1.1上,以其轴心的轴套与构成导轴8.1.1转动动配合。托带轴8.2为托带盘8.4的中轴凸出部,其内套制有上端不透的轴孔,即轴承套8.2.1;通过轴承套8.2.1,托带盘8.4与端座盘8.5构成转动配合。托带盘8.4为制有托带轴8.2的圆盘,圆盘体连同托带轴8.2一体的中轴位,套制有上端不透的轴孔,即轴承套8.2.1。端座盘8.5外侧中位向外延伸出弹臂8.9,上面右内角位装配托带盘8.4,上面左内角位装配导带轮8.1,下面中部偏左外位安装切头驱动线圈8.11。摇臂电缆8.6引入摇臂8.8首段下面的线缆孔道,从摇臂8.8尾端下面的线缆孔道尾口引出。摇臂电机8.7的输出轴紧固装配摇臂8.8。摇臂8.8的首端紧固装配于摇臂电机8.7的输出轴端,尾端通过摇轴8.10.3和调节柄8.17的可调松紧轴结构装配弹臂8.9和连臂8.10。弹臂8.9的首端通过摇轴8.10.3和调节柄8.17的可调松紧轴结构装配在摇臂8.8的尾端,尾端与端座盘8.5连为一体,为座盘8.5的向外延伸。连臂8.10的首端通过摇轴8.10.3和调节柄8.17的可调松紧轴结构装配在摇臂8.8的尾端,尾端通过动铰轴8.12.2与连杆8.12的尾端铰链配合;连臂8.10的尾端向左延伸出柔臂8.10.2。牵轴8.10.1为柔臂8.10.2左端的向上延伸,与牵带轮8.16的轴套构成转动配合。柔臂8.10.2为翘曲偏板形弹性材料,右端延伸于连臂8.10并通过动铰轴8.12.2与连杆8.12的尾端铰接,左端制有向上延伸的牵轴8.10.1。切头驱动线圈8.11安装于端座盘8.5中部偏左外位的窗口下面,其上部嵌入窗口,其骨架上面与端座盘8.5的上面平齐。铁芯8.11.1以其中段穿套装配在切头驱动线圈8.11骨架的套筒内,以其上面紧固贴装在端座盘8.5下面中部的偏左外位;铁芯8.11.1的两端面朝左。连杆8.12首端装配在端座盘8.5左内侧下方的基铰轴8.12.1上,以其轴套与基铰轴8.12.1构成铰链配合,尾端通过动铰轴8.12.2与连臂8.10的尾端铰链配合。基铰轴8.12.1与连杆8.12首端构成铰链配合。动铰轴8.12.2将连臂8.10与连杆8.12铰铰链连接,上端制有卡冒结构下端配有卡销结构。电热电缆8.13在摇臂8.8的线缆孔道尾口引出后,从摇臂电缆8.6中与压力信号线分离并引出,下伴贴敷弹臂8.9、端座盘8.5,沿切头驱动线圈8.11的外侧引入切头8.14。切头8.14尾端(即左端)上面安装切刀8.15,下面引入电热电缆8.13并支撑电热电缆8.13与切刀8.15的电气连接;切头8.14以其首端(即右端)下面与切臂8.14.1连接一体,为切臂8.14.1的向尾端上面延伸。切臂8.14.1的首端与永磁体8.14.2连接为一体,尾端上面向左延伸出切头8.14。永磁体8.14.2一端在切臂8.14.1的首端与切臂8.14.1同轴连接为一体,另一端作为电磁力受力端。切刀8.15根部装配于切头8.14的尾端。牵带轮8.16装配在柔臂8.10.2左端的牵轴8.10.1上,以其轴套与牵轴8.10.1构成转动配合。调节柄8.17与摇轴8.10.3结构配合,铰结摇臂8.8、弹臂8.9和连臂8.10。压带轮8.18装配在端座盘8.5左外角上面的压轴8.18.1上,以其轴套与压轴8.18.1构成转动配合。
导轴8.1.1作为装配并定位导带轮8.1的轴杆结构,以其根端紧固装配于端座盘8.5的左内端,垂直于端座盘8.5盘面,在端座盘8.5上面与导带轮8.1的轴套构成转动配合。压轴8.18.1作为装配并定位压带轮8.18,限位切臂8.14.1摆动的轴杆结构,以其下端连接切臂8.14.1的右外端,垂直于端座盘8.5盘面,其上段在端座盘8.5上面与压带轮8.18的轴套构成转动配合,其下段作为限位卡销,在切臂8.14.1的上面穿过端座盘8.5。
在图5所示的板形工件包边装置的馈带机构视图和图6所示的馈带机构的B-B向结构剖视图中:
摇臂8.8的尾端通过调节柄8.17的可调松紧轴结构装配弹臂8.9和连臂8.10。弹臂8.9的首端通过调节柄8.17的可调松紧轴结构装配在摇臂8.8的尾端。连臂8.10的首端通过调节柄8.17的可调松紧轴结构装配在摇臂8.8的尾端。调节柄8.17铰结摇臂8.8、弹臂8.9和连臂8.10。
左压电片8.9.1作为弹臂8.9的受压左凸形变传感器件,为变电阻型应变片制成,以应变片专用胶紧密贴敷于弹臂8.9的左侧面。右压电片8.9.2作为弹臂8.9的受压右凹形变传感器件,为变电阻型应变片制成,以应变片专用胶紧密贴敷于弹臂8.9的右侧面。左压电片8.9.1的两引线之一与右压电片8.9.2的两引线之一连接,左压电片8.9.1和右压电片8.9.2的另一引线分别与压力信号线的两根连接。
在5~6所示的馈带机构的视图和图7所示的胶带带压信号检测-放大-执行电路图中:左压电片电阻Rp1与右压电片电阻Rp2串联,该串联点连接到系统工作电源正极端EP,该串联支路两端分别作为左信号引出端a和右信号引出端b。左平衡电阻RBP1与右平衡电阻RBP2串联,该串联点接地,该串联支路跨接在左信号引出端a和右信号引出端b之间。弹臂反馈分压电阻RBP3的一端与弹臂靠紧信号运放ABP的反相输入端连接,另一端接地。弹臂靠紧信号运放ABP的反相输入端连接到右信号引出端b,正相输入端连接到左信号引出端a。弹臂反馈电阻RBPf跨接在弹臂靠紧信号运放ABP的反相输入端与弹臂靠紧信号运放ABP输出端之间。弹臂靠紧信号运放ABP的正极电源端连接到系统工作电源正极端EP,负极电源端连接到系统工作电源负极端EN。弹臂信号光耦LCB的输入端正极通过弹臂光耦限流电阻RBP4与弹臂靠紧信号运放ABP的输出端连接,弹臂信号光耦LCB的输入端负极连接到系统工作电源负极端EN;弹臂信号光耦LCB的输出端正极作为弹臂靠紧信号接线端PBP,弹臂信号光耦LCB的输出端负极接地。弹臂靠紧执行运放ABF的正相输入端通过弹臂靠紧信号耦合电阻RBF1与弹臂靠紧信号运放ABP的输出端连接。弹臂靠紧执行运放ABF的反相输入端通过反馈分压电阻RBF2接地;通过反馈电阻RBF3与弹臂靠紧执行运放ABF的输出端连接。弹臂靠紧执行运放ABF的电源正极端连接到系统工作电源正极端EP;弹臂靠紧执行运放ABF的电源负极端连接到系统工作电源负极端EN。弹臂续流二极管DBF正极端与弹臂靠紧执行运放ABF的输出端连接,负极端连接到系统工作电源正极端EP。弹臂靠紧执行继电器JBF的电磁线圈跨接在系统工作电源正极端EP和弹臂靠紧执行运放ABF的输出端之间。
在图2所示的板形工件包边装置结构主视图、图7所示的电路图和图8所示的板形工件包边系统操作、控制电路图中:
控制电路工作指示LED DP的正极通过控制电路工作指示电阻RP连接到系统控制电路电源正极端E,控制电路工作指示LED DP的负极连接到控制器芯片U的PD0引脚。弹臂靠紧信号接线端PBP连接到控制器芯片U的PD1引脚。下料臂逆变触发模块Gβ右框中对应于上料臂逆变触发模块Gα左框中的A相正极触发信号下拉电阻RAP0的一端、B相正极触发信号下拉电阻RBP0的一端、C相正极触发信号下拉电阻RCP0的一端、A相负极触发信号下拉电阻RAN0的一端、B相负极触发信号下拉电阻RBN0的一端和C相负极触发信号下拉电阻RCN0的一端分别连接到控制器芯片U的PD2、PD3、PD4、PD5、PD6和PD7引脚。控制系统启动键KM的一端通过启动信号缓冲电阻RKM连接到控制器芯片U的PA0引脚,另一端接地;启动信号缓冲电容CKM跨接在控制器芯片U的PA0引脚与地之间。主电机转角反馈信号接线端Pn通过转角反馈信号耦合电阻RM连接到控制器芯片U的PA1引脚;上料臂摆角反馈信号接线端Pα通过上料臂摆角反馈信号耦合电阻RPF连接到控制器芯片U的PA2引脚;下料臂摆角反馈信号接线端Pβ通过下料臂摆角反馈信号耦合电阻RPB连接到控制器芯片U的PA3引脚。上料杆上缩到位信号光耦LCTF的输出端正极连接到控制器芯片U的PA4引脚,上料杆上缩到位信号光耦LCTF的输出端负极接地;下料杆上缩到位信号光耦LCTB的输出端正极连接到控制器芯片U的PA5引脚,下料杆上缩到位信号光耦LCTB的输出端负极接地。上料杆触压信号接线端PSF连接到控制器芯片U的PA6引脚;下料杆触压信号接线端PSB连接到控制器芯片U的PA7引脚。第一自激电容Cp1跨接在控制器芯片U的XTAL1引脚和地之间;第二自激电容Cp2跨接在控制器芯片U的XTAL2引脚和地之间;晶振Cf跨接在控制器芯片U的XTAL1引脚和XTAL2引脚之间。控制器芯片U的VCC引脚连接到系统控制电路电源正极端E。上料臂摆角取、放料位信号接线端Pα连接到控制器芯片U的PC7引脚;下料臂摆角取、放料位信号接线端Pβ连接到控制器芯片U的PA6引脚。A相正极触发信号下拉电阻RAP0的一端、B相正极触发信号下拉电阻RBP0的一端、C相正极触发信号下拉电阻的一端、A相负极触发信号下拉电阻的一端、B相负极触发信号下拉电阻的一端和C相负极触发信号下拉电阻的一端分别连接到控制器芯片U的PC5、PC4、PC3、PC2、PC1和PC0引脚,A相正极触发信号下拉电阻RAP0的另一端、B相正极触发信号下拉电阻RBP0的另一端、C相正极触发信号下拉电阻的另一端、A相负极触发信号下拉电阻的另一端、B相负极触发信号下拉电阻的另一端和C相负极触发信号下拉电阻的另一端分别连接到A相正驱动光耦LCAP、B相正驱动光耦LCBP、C相正驱动光耦LCCP、A相负驱动光耦LCAN、B相负驱动光耦LCBN和C相负驱动光耦LCCN的输入端正极;A相正驱动光耦LCAP、B相正驱动光耦LCBP、C相正驱动光耦LCCP、A相负驱动光耦LCAN、B相负驱动光耦LCBN和C相负驱动光耦LCCN的输入端负极均接地。主电机转到3位信号接线端Pn3为、主电机转到2位信号接线端Pn2、主电机转到1位信号接线端Pn1和主电机转角控制信号接线端PnC分别连接到控制器芯片U的PB7、PB6、PB5和PB4引脚。馈带机构操控信号光耦LCPW的输入端正极、下料杆上缩操控信号光耦LCPTB的输入端正极、上料杆下伸操控信号光耦LCNTF的输入端正极和上料杆上缩操控信号光耦LCPTF的输入端正极分别通过馈带机构操控信号下拉电阻RPW、下料杆上缩操控信号下拉电阻RRPB、上料杆下伸操控信号下拉电阻RNTF和上料杆上缩操控信号下拉电阻RPTF连接到控制器芯片U的PB3、PB2、PB1和PB0引脚。重置信号上拉电阻RR1跨接在系统控制电路电源正极端E和控制器芯片U的 引脚之间;重置信号缓冲电阻RR2与控制器重置按键KR串连,该串连支路与重置信号缓冲电容CR并连;该并连支路跨接在控制器芯片U的 引脚与地之间。控制器芯片U的GND引脚接地。
在图7~8所示的电路图和图9所示的系统工作电源变换电路图:
工作电源变换电路为以SD4842型PWM控制器芯片UP为核心的开关电源。
三相电源线通过电源开关KP连接到三相整流桥Br的交流输入端;三相整流桥Br的正极输出端与第一滤波电容C3的正极连接,三相整流桥Br的负极输出端接壳。第一滤波电容CP1的负极接壳;吸收电容CP2与吸收电阻RP1并联,该并联支路的一端与第一滤波电容CP1的正极连接,另一端与吸收吸收二极管DP0的负极连接;吸收二极管DP0的正极与PWM控制器芯片UP的6、7、8脚连接。PWM控制器芯片UP的1、2脚接壳;PWM控制器芯片UP的3脚与第二滤波电容CP3的正极连接,第二滤波电容CP3的负极接壳;PWM控制器芯片UP的4脚通过缓冲电容C6接壳;PWM控制器芯片UP的5脚悬空。分压电阻RP2跨接在第一滤波电容CP1的正极与PWM控制器芯片UP的3脚之间。
输出变压器TrP的输出变压器原绕组W1同名端连接到第一滤波电容CP1的正极,其异名端连接到PWM控制器芯片UP2的6、7、8脚;输出变压器TrP的输出变压器检测绕组W2同名端限流电阻RP3与整流二极管DP1的正极连接,整流二极管DP1的负极连接到PWM控制器芯片UP的3脚;输出变压器TrP的输出变压器检测绕组W2异名端接壳。
输出变压器TrP的输出变压器第一副绕组W3的一端连接到系统控制工作电源正输出整流二极管DP2的正极,另一端接地;系统控制工作电源正输出整流二极管DP2的负极与系统控制工作电源正输出第一滤波电容CP5的正极连接,系统控制工作电源正输出第一滤波电容CP5的负极接地。系统控制工作电源正输出滤波电感LP1跨接在系统控制工作电源正输出第一滤波电容CP5的正极和系统控制工作电源正输出第二滤波电容CP7的正极之间;系统控制工作电源正输出第二滤波电容CP7的负极接地。系统控制工作电源正输出第二滤波电容CP7的正极连接到系统控制电路电源正极端E。
输出变压器TrP的输出变压器第二绕组W4为异名端和输出变压器第三绕组W5异名端均接地;输出变压器TrP的输出变压器第二绕组W4同名端和输出变压器第三绕组W5同名端分别与系统工作电源正输出整流二极管DP3的正极和系统工作电源负输出整流二极管DP4的负极连接。系统工作电源正输出整流二极管DP3的负极同时与系统工作电源正输出第一滤波电容CP8的正极及系统工作电源正输出滤波电感LP2的一端连接;系统工作电源正输出第一滤波电容CP8的负极接地;系统工作电源正输出滤波电感LP2的另一端与系统工作电源正输出第二滤波电容CP9的正极连接,该连接点连接到系统工作电源正极端EP。系统工作电源正输出第二滤波电容CP9的负极接地。系统工作电源负输出整流二极管DP4的正极同时与负输出第一滤波电容CP10的负极及系统工作电源负输出滤波电感LP3的一端连接;系统工作电源负输出滤波电感LP3的另一端与系统工作电源正输出第二滤波电容CP11的负极连接,该连接点连接到系统工作电源负极端EN。系统工作电源负输出第二滤波电容CP11的正极接地。
反馈限流电阻RP4的一端连接到系统工作电源正极端EP,另一端与反馈光耦器件LCP的1脚连接。反馈分压第一电阻RP5的一端连接到系统工作电源正极端EP,另一端与反馈分压第二电阻RP6的一端连接;反馈分压第二电阻RP6的另一端接地。基准电压源器件UP0的正极与反馈光耦器件LCP的2脚连接,基准电压源器件UP0的负极接地,基准电压源器件UP0的控制极连接到与反馈分压第一电阻RP5与反馈分压第二电阻RP6的连接点。自激吸收电容CP9跨接在基准电压源器件UP0的正极与控制极之间。反馈光耦器件LCP的3脚接壳,反馈光耦器件LCP的4脚与PWM控制器芯片UP的4脚连接。
板形工件包边装置馈带机构的带压传感器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0