








专利摘要
本发明适用于无线通信技术领域,提供了一种基于物理引力模型部署无人机增强基站通信的方法,包括:S1、利用KDivide的方法横竖交替切割对热点区域进行划分使得划分的每个小方块内用户数都满足单台无人机的容量;S2、通过计算ObjectiveFunction判断划分的小方块内是否需要分配无人机,如是,则分配无人机并执行下一步,如否,则不分配无人机;S3、根据EMech对没有被覆盖的用户定位无人机的位置;S4、利用RMerge逆转步骤S1对划分的小方块进行两两合并直至合并为初始热点区域的方块。该方法有效的提高了基站所能提供的数据效率。
权利要求
1.一种基于物理引力模型部署无人机增强基站通信的方法,其特征在于,所述方法包括以下步骤:
S1、利用KDivide的方法横竖交替切割对热点区域进行划分使得划分的每个小方块内用户数都满足单台无人机的容量;
S2、通过计算Objective Function(判断划分的小方块内是否需要分配无人机,如是,则分配无人机并执行下一步,如否,则不分配无人机;
S3、根据EMech对没有被覆盖的用户定位无人机的位置;
S4、利用RMerge逆转步骤S1对划分的小方块进行两两合并直至合并为初始热点区域的方块。
2.根据权利要求1所述的基于物理引力模型部署无人机增强基站通信的方法,其特征在于,所述步骤S1中还包括以下步骤:
S11、判断切割划分是否划分方向,如未选择划分方向,则选择划分方向s,如已选择划分方向s’,则令s’=s;
S12、判断当前方块内的用户数是否超过单台无人机的容量,如超过,则根据划分方向s均匀划分当前方块并将划分方向置为垂直原方向的s’,如未超过,则停止该方块划分;
S13、重复步骤S11和S12的过程直到所有方块内的用户数均满足单台无人机的容量。
3.根据权利要求2所述的基于物理引力模型部署无人机增强基站通信的方法,其特征在于,所述步骤S2还包括以下步骤:
S21、计算当前方块的Objective Function并将其标记为OF;
S22、计算当前方块部署无人机后的Objective Function并将其标记为OF’;
S23、判断当前方块的OF与OF’的大小,如OF大于OF’,则分配无人机,如OF小于等于OF’,则不分配无人机。
4.根据权利要求3所述的基于物理引力模型部署无人机增强基站通信的方法,其特征在于,所述步骤S3还包括以下步骤:
S31、在给定方块中选择初始放入位置为随机位置;
S32、计算方块内用户群对无人机吸引力作用力的合力;
S33、根据无人机在吸引力合力的方向向上位移一段距离;
S34、重复步骤S32和步骤S33过程使得用户群对无人机的作用力的合力达到平衡点的位置。
5.根据权利要求4所述的基于物理引力模型部署无人机增强基站通信的方法,其特征在于,所述步骤S4还包括以下步骤:
S41、判断两两合并的小方块A、B之前是否分配无人机;如两个小方块A、B均没有分配无人机,则先合并两个方块构成新方块C,并调用步骤S2判断新方块是否分配新的无人机;如两个小方块A、B一个含有无人机一个没有无人机,则先合并两个方块构成新方块C,在原分割线左右Rmax距离的矩形内构造方块C’,调用步骤S2判断方块C’是否分配新的无人机,若不分配无人机,则调用步骤S3调整方块内所有无人机的位置;如两个小方块A、B均分配有无人机,则先合并成新的方块C,在原分割线左右Rmax距离的矩形内构造方块C’,调用步骤S2判断方块C’是否分配新的无人机,若不分配无人机,计算两两无人机之间的距离。
6.根据权利要求4所述的基于物理引力模型部署无人机增强基站通信的方法,其特征在于,所述步骤S41还包括以下步骤:
S411、判断两个无人机之间的距离是否小于2×Rmax,如是,则计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的计算方块的Objective Function记为OF;若移除一台无人机,调用S3步骤,并计算方块的Objective Function,记为OF’;若OF’大于OF,则移除一台无人机,反之不移除;如否,则执行下一步;
S412、判断两个无人机之间的距离是否小于4×Rmax,如是,则计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的Objective Function记为OF;若增加一台无人机,调用S3步骤,并计算方块的Objective Function,记为OF’;若OF’大于OF,则增加一台无人机,反之不增加;如不是,则距离大于4×Rmax不对无人机位置做任何调整。
7.一种基于物理引力模型部署无人机增强基站通信的系统,其特征在于,所述系统包括
区域划分模块,用于利用KDivide的方法横竖交替切割对热点区域进行划分使得划分的每个小方块内用户数都满足单台无人机的容量;
计算判断划分模块,用于通过计算Objective Function判断划分的小方块内是否需要分配无人机,如是,则分配无人机并执行下一步,如否,则不分配无人机;
定位模块,用于根据EMech对没有被覆盖的用户定位无人机的位置;
合并模块,用于利用RMerge逆转区域划分模块过程对划分的小方块进行两两合并直至合并为初始热点区域的方块。
8.根据权利要求7所述的基于物理引力模型部署无人机增强基站通信的系统,其特征在于,所述区域划分模块还包括
划分方向判断单元,用于判断切割划分是否划分方向,如未选择划分方向,则选择划分方向s,如已选择划分方向s’,则令s’=s;
容量判断单元,用于判断当前方块内的用户数是否超过单台无人机的容量,如超过,则根据划分方向s均匀划分当前方块并将划分方向置为垂直原方向的s’,如未超过,则停止该方块划分;
容量饱和单元,用于重复划分方向判断单元和容量判断单元的过程直到所有方块内的用户数均满足单台无人机的容量。
9.根据权利要求8所述的基于物理引力模型部署无人机增强基站通信的系统,其特征在于,所述计算判断模块还包括
第一计算单元,用于计算当前方块的Objective Function并将其标记为OF;
第二计算单元,用于计算当前方块部署无人机后的Objective Function并将其标记为OF’;
大小判断单元,用于判断当前方块的OF与OF’的大小,如OF大于OF’,则分配无人机,如OF小于等于OF’,则不分配无人机。
10.根据权利要求9所述的基于物理引力模型部署无人机增强基站通信的系统,其特征在于,所述计算判断模块还包括
选择位置单元,用于在给定方块中选择初始放入位置为随机位置;
合力计算单元,用于计算方块内用户群对无人机吸引力作用力的合力;
位移移动单元,用于根据无人机在吸引力合力的方向向上位移一段距离;
合力平衡点单元,用于重复合力计算单元和位移移动单元的过程使得用户群对无人机的作用力的合力达到平衡点的位置。
所述合并模块还包括
无人机分配单元,用于判断两两合并的小方块A、B之前是否分配无人机;如两个小方块A、B均没有分配无人机,则先合并两个方块构成新方块C,并调用计算判断划分模块过程判断新方块是否分配新的无人机;如两个小方块A、B一个含有无人机一个没有无人机,则先合并两个方块构成新方块C,在原分割线左右距离的矩形内构造方块C’,调用计算判断划分模块过程判断方块C,是否分配新的无人机,若不分配无人机,则调用定位模块过程调整方块内所有无人机的位置;如两个小方块A、B均分配有无人机,则先合并成新的方块C,在原分割线左右距离的矩形内构造方块C’,调用计算判断划分模块过程判断方块C,是否分配新的无人机,若不分配无人机,计算两两无人机之间的距离;
所述无人机分配单元还包括
第一距离计算单元,用于判断两个无人机之间的距离是否小于2×Rmax,如是,则计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的计算方块的ObjectiveFunction记为OF;若移除一台无人机,调用定位模块,并计算方块的Objective Function,记为OF’;若OF’大于OF,则移除一台无人机,反之不移除;如否,则执行下一步;
第二距离计算单元,用于判断两个无人机之间的距离是否小于4×Rmax,如是,则计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的Objective Function记为OF;若增加一台无人机,调用定位模块,并计算方块的Objective Function,记为OF’;若OF’大于OF,则增加一台无人机,反之不增加;如不是,则距离大于4×Rmax不对无人机位置做任何调整。
说明书
技术领域
本发明属于无线通信技术领域,尤其涉及一种基于物理引力模型的室外部署无人机增强基站通信的方法。
背景技术
随着无人机通信技术的不断发展,使用无人机作为空中移动基站为缓解短时间内基站负载过重提供了解决方案,这是下一代网络提供商关注的重点。具体而言,无人机可以在地面用户与地面基站之间扮演中继的角色,以满足热点地区不断增长的业务需求。与传统的地面基站相比,无人机较为灵活,可以根据用户需求进行分配且安置方便快捷。同时,由于无人机的飞行高度,地面障碍物的遮蔽和多径效应较小,因此无人机通信与地面用户的视距连接概率较大,所以,在城市地区部署无人机作为移动基站能使数据速率得到大大的改善。一些公共的临时事件,比如音乐会,运动会或者游行,若地面数据蜂窝无法提供期望的容量和覆盖范围,搭建地面基站不现实,构建基于无人机的空中基站是一个吸引人的解决方案。
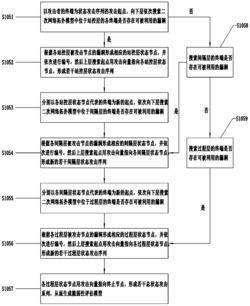
对于无人机的部署问题,专利号为201611150293.7,申请日为2016年12月14日国内申请专利公开了一种应灾无人机基站的控制方法和装置。该产品通过对受灾区域地形以及空信道的精确估计,周期性地对各个无人机基站的部署位置及高度进行调整。该发明可以有效地提高无人机基站辅助的应灾通信的网络连通率,保障灾区通信的稳定。专利号为201580040288.8,申请日为2015年7月2日国内申请专利公开了一种用于改进蜂窝电话通信的无人飞行器的部署标准。该产品通过识别所在区域确定的增加得合计需求与预测的合计蜂窝电话需求相比是否存在现有使用覆盖的失配。基于所识别的失配,确定用于发送信号并部署一个或多个UAV的计划。专利号为201610537734.2,申请日为2016年7月8日国内申请专利公开了一种无人机数据收寄过程中的路径规划方法。该产品通过综合考虑感知节点随时可能采集到的数据和环境中随时可能出现的障碍物,动态地规划无人机的航行路线,最终使得无人机在能量受限的情况下,收集到的数据具有最大的数据价值。
人们主要提供了两大类的解决方案。第一种,将热点区域划分为若干个固定大小的小区域并给每个小区域按用户需求赋予优先级,根据优先级分配无人机。第二种,采用聚类的方法,将无人机放置在聚类的中心位置。这些方法固定了无人机的数量,不具备灵活性,我们希望提出一种可以根据用户需求灵活调整无人机数目的算法。
发明内容
本发明的目的在于提供一种基于物理引力模型部署无人机增强基站通信的方法及系统,旨在解决上述的技术问题。
本发明是这样实现的,一种基于物理引力模型部署无人机增强基站通信的方法,所述方法包括以下步骤:
S1、利用KDivide(kd-tree based divide method,基于kd-tree的划分方法)的方法横竖交替切割对热点区域进行划分使得划分的每个小方块内用户数都满足单台无人机的容量;
S2、通过计算Objective Function(目标函数)判断划分的小方块内是否需要分配无人机,如是,则分配无人机并执行下一步,如否,则不分配无人机;
S3、根据EMech(mechanics equilibrium,力平衡)对没有被覆盖的用户定位无人机的位置;
S4、利用RMerge(Reverse Merge Process,划分逆过程)逆转步骤S1对划分的小方块进行两两合并直至合并为初始热点区域的方块。
本发明的进一步技术方案是:所述步骤S1中还包括以下步骤:
S11、判断切割划分是否划分方向,如未选择划分方向,则选择划分方向s,如已选择划分方向s’,则令s’=s;
S12、判断当前方块内的用户数是否超过单台无人机的容量,如超过,则根据划分方向s均匀划分当前方块并将划分方向置为垂直原方向的s’,如未超过,则停止该方块划分;
S13、重复步骤S11和S12的过程直到所有方块内的用户数均满足单台无人机的容量。
本发明的进一步技术方案是:所述步骤S2还包括以下步骤:
S21、计算当前方块的Objective Function并将其标记为OF;
S22、计算当前方块部署无人机后的Objective Function并将其标记为OF’;
S23、判断当前方块的OF与OF’的大小,如OF大于OF’,则分配无人机,如OF小于等于OF’,则不分配无人机。
本发明的进一步技术方案是:所述步骤S3还包括以下步骤:
S31、在给定方块中选择初始放入位置为随机位置;
S32、计算方块内用户群对无人机吸引力作用力的合力;
S33、根据无人机在吸引力合力的方向向上位移一段距离;
S34、重复步骤S32和步骤S33过程使得用户群对无人机的作用力的合力达到平衡点的位置。
本发明的进一步技术方案是:所述步骤S4还包括以下步骤:
S41、判断两两合并的小方块A、B之前是否分配无人机;如两个小方块A、B均没有分配无人机,则先合并两个方块构成新方块C,并调用步骤S2判断新方块是否分配新的无人机;如两个小方块A、B一个含有无人机一个没有无人机,则先合并两个方块构成新方块C,在原分割线左右Rmax距离的矩形内构造方块C’,调用步骤S2判断方块C’是否分配新的无人机,若不分配无人机,则调用步骤S3调整方块内所有无人机的位置;如两个小方块A、B均分配有无人机,则先合并成新的方块C,在原分割线左右Rmax距离的矩形内构造方块C’,调用步骤S2判断方块C’是否分配新的无人机,若不分配无人机,计算两两无人机之间的距离。
本发明的进一步技术方案是:所述步骤S41还包括以下步骤:
S411、判断两个无人机之间的距离是否小于2×Rmax,如是,则计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的计算方块的Objective Function记为OF;若移除一台无人机,调用S3步骤,并计算方块的Objective Function,记为OF’;若OF’大于OF,则移除一台无人机,反之不移除;如否,则执行下一步;
S412、判断两个无人机之间的距离是否小于4×Rmax,如是,则计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的Objective Function记为OF;若增加一台无人机,调用S3步骤,并计算方块的Objective Function,记为OF’;若OF’大于OF,则增加一台无人机,反之不增加;如不是,则距离大于4×Rmax不对无人机的位置进行调整。
本发明的另一目的在于提供一种基于物理引力模型部署无人机增强基站通信的系统,所述系统包括
区域划分模块,用于利用KDivide的方法横竖交替切割对热点区域进行划分使得划分的每个小方块内用户数都满足单台无人机的容量;
计算判断划分模块,用于通过计算Objective Function判断划分的小方块内是否需要分配无人机,如是,则分配无人机并执行下一步,如否,则不分配无人机;
定位模块,用于根据EMech对没有被覆盖的用户定位无人机的位置;
合并模块,用于利用RMerge逆转区域划分模块过程对划分的小方块进行两两合并直至合并为初始热点区域的方块。
本发明的进一步技术方案是:所述区域划分模块还包括
划分方向判断单元,用于判断切割划分是否划分方向,如未选择划分方向,则选择划分方向s,如已选择划分方向s’,则令s’=s;
容量判断单元,用于判断当前方块内的用户数是否超过单台无人机的容量,如超过,则根据划分方向s均匀划分当前方块并将划分方向置为垂直原方向的s’,如未超过,则停止该方块划分;
容量饱和单元,用于重复划分方向判断单元和容量判断单元的过程直到所有方块内的用户数均满足单台无人机的容量。
本发明的进一步技术方案是:所述计算判断模块还包括
第一计算单元,用于计算当前方块的Objective Function并将其标记为OF;
第二计算单元,用于计算当前方块部署无人机后的Objective Function并将其标记为OF’;
大小判断单元,用于判断当前方块的OF与OF’的大小,如OF大于OF’,则分配无人机,如OF小于等于OF’,则不分配无人机。
本发明的进一步技术方案是:所述计算判断模块还包括
选择位置单元,用于在给定方块中选择初始放入位置为随机位置;
合力计算单元,用于计算方块内用户群对无人机吸引力作用力的合力;
位移移动单元,用于根据无人机在吸引力合力的方向向上位移一段距离;
合力平衡点单元,用于重复合力计算单元和位移移动单元的过程使得用户群对无人机的作用力的合力达到平衡点的位置。
所述合并模块还包括
无人机分配单元,用于判断两两合并的小方块A、B之前是否分配无人机;如两个小方块A、B均没有分配无人机,则先合并两个方块构成新方块C,并调用计算判断划分模块过程判断新方块是否分配新的无人机;如两个小方块A、B一个含有无人机一个没有无人机,则先合并两个方块构成新方块C,在原分割线左右距离的矩形内构造方块C’,调用计算判断划分模块过程判断方块C,是否分配新的无人机,若不分配无人机,则调用定位模块过程调整方块内所有无人机的位置;如两个小方块A、B均分配有无人机,则先合并成新的方块C,在原分割线左右距离的矩形内构造方块C’,调用计算判断划分模块过程判断方块C,是否分配新的无人机,若不分配无人机,计算两两无人机之间的距离;
所述无人机分配单元还包括
第一距离计算单元,用于判断两个无人机之间的距离是否小于2×Rmax,如是,则计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的计算方块的Objective Function记为OF;若移除一台无人机,调用定位模块,并计算方块的ObjectiveFunction,记为OF’;若OF’大于OF,则移除一台无人机,反之不移除;如否,则执行下一步;
第二距离计算单元,用于判断两个无人机之间的距离是否小于4×Rmax,如是,则计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的ObjectiveFunction记为OF;若增加一台无人机,调用定位模块,并计算方块的Objective Function,记为OF’;若OF’大于OF,则增加一台无人机,反之不增加;如不是,则距离大于4×Rmax不对无人机的位置进行调整。
本发明的有益效果是:通过该方法有效的改善了基站所能提供的数据效率,覆盖范围更加全面,增强了信号的强度,使得基站的使用效率加强。
附图说明
图1是本发明实施例提供的基于物理引力模型部署无人机增强基站通信的方法及系统;
图2是本发明实施例提供的基于物理引力模型部署无人机增强基站通信的方法及系统;
图3是本发明实施例提供的基于物理引力模型部署无人机增强基站通信的方法及系统。
具体实施方式
如图1-2所示,本发明提供的基于物理引力模型部署无人机增强基站通信的方法,其详述如下:
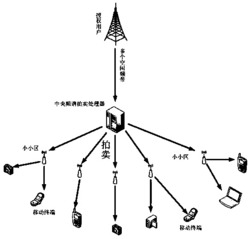
在实际引用中,无人机是基站与用户之间的中继。无人机与基站用蜂窝数据通信,和无人机与用户使用工作在2.4GHz的WiFi通信。该方法是首先基于一个划分的思想,对热点区域进行切割,将问题化小。然后引入物理力的模型,模拟力的作用,将用户视为一个个带负电的粒子,无人机为正电粒子,用户对无人机有力的作用直至无人机到达平衡点。这个方法不仅仅可以用来为单个方块分配无人机,还可以用户后续步骤对无人机的位置进行挪动。这时候还需要考虑一个效益的问题,通过计算Objective Function来权衡收益与代价。最后,将所有的小方块重新合并成最开始的大方块,是划分的逆过程。
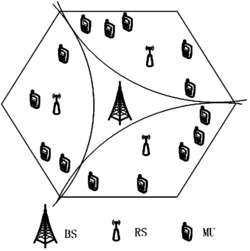
由于无人机的覆盖用户的容量有限,我们先对热点区域进行划分,但划分的方法将直接影响后面的分配的结果。最简单的方法就是,朝同一方向进行切割,这样的缺点是会形成细长条型的区域,而无人机的覆盖范围抽象为圆形。受构建K-D Tree过程的启示,我们提出了横竖交替切割区域的方法,并取名为KDivide。这样能得到的矩形能更易于分配无人机,合理利用资源且能部分避免无人机之间的干扰。
步骤S1,利用KDivide的方法横竖交替切割对热点区域进行划分使得划分的每个小方块内用户数都满足单台无人机的容量;采用KDivide的方法对热点区域进行横竖交替的划分,直到每个小区域内的用户数都满足单台无人机的容量;无人机是基站与用户之间的中继。无人机与基站用蜂窝数据通信,和无人机与用户使用工作在2.4GHz的WiFi通信。所采用的设备为现有无线商用设备,不需要安装专用设备。在划分方块过程中,S11、判断切割划分是否划分方向,如未选择划分方向,则选择划分方向s,如已选择划分方向s,,则令s,=s;S12、判断当前方块内的用户数是否超过单台无人机的容量,如超过,则根据划分方向s均匀划分当前方块并将划分方向置为垂直原方向的s,,如未超过,则停止该方块划分;S13、重复步骤S11和S12的过程直到所有方块内的用户数均满足单台无人机的容量。
完整大区域内的用户数超出了单台无人机的容量,对区域进行横向/纵向的切割;划分后的小区域的用户数超过了单台无人机的容量,对小区域采取与上一次切割方向相垂直的方向进行切割(横竖交替),直到每一个小区域内的用户数都满足单台无人机的容量。该方法定义为KDivide。
步骤S2,通过计算Objective Function判断划分的小方块内是否需要分配无人机,如是,则分配无人机并执行下一步,如否,则不分配无人机;在对小方块是否需要无人机的过程中,其中还进行了以下的过程,S21、计算当前方块的Objective Function并将其标记为OF;S22、计算当前方块部署无人机后的Objective Function并将其标记为OF;S23、判断当前方块的OF与OF’的大小,如OF大于OF’,则分配无人机,如OF小于等于OF,则不分配无人机。通过上述的过程来完成无人及的部署和使用。
Objective Function为自定义的目标函数,Objective Function=Gain(K)-Cost(K)。Gain(K)为分配K台无人机后取得的吞吐量的提升,Cost(K)为分配K台无人机的代价(经济代价,干扰代价)。
步骤S3,根据EMech对没有被覆盖的用户定位无人机的位置;在对被覆盖的用户定位无人机的过程中,进行了如下操作,S31、在给定方块中选择初始放入位置为随机位置;S32、计算方块内用户群对无人机吸引力作用力的合力;S33、根据无人机在吸引力合力的方向向上位移一段距离;S34、重复步骤S32和步骤S33过程使得用户群对无人机的作用力的合力达到平衡点的位置。在这一步中,我们将用户抽象成一个带负电的粒子,无人机抽象为一个带正电的粒子,两者之间会有引力的作用,定义为:
ka是引力系数,kd是衰减系数,n是用户到无人机的距离除以无人机最大覆盖范围取整,mu是用户的质量为1,mv是无人机的质量也为1, 是归一化操作, 是对角线距离的平方。
无人机随机选一个点放入时,周围的用户会对无人机有力的作用,在这个作用力下,无人机会发生移动,直到到达平衡点为止。
将用户视为带负电的粒子,无人机视为带正电的粒子,无人机部署在合力为0的地方。该方法定义为EMech。
步骤S4,利用RMerge逆转步骤S1对划分的小方块进行两两合并直至合并为初始热点区域的方块。在合并小方块成初始的区域大方块的过程中,进行了如下操作,S41逆步骤S1划分顺序,小方块之间两两进行合并;S42如果方块A和方块B之前都没有分配无人机,先合并方块A和B成新的方块C。调用S2步骤,判断方块C是否分配新的无人机。S43如果方块A中含有无人机和方块B中没有无人机,先合并方块A和B成新的方块C。在原分割线左右Rmax距离的矩形内构造方块C’,调用S2步骤,判断方块C‘是否分配新的无人机。若不分配无人机,调用S3步骤调整方块内所有无人机的位置。S44如果方块A和B都分配了无人机,同样先进行合并成新的方块C。同S43,在原分割线左右Rmax的距离的矩形内构造方块C’,调用S2步骤,判断方块C‘是否分配新的无人机。若不分配无人机,计算无人机之间两两的距离。
S441如果无人机之间的距离小于2×Rmax,计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的Objective Function记为OF;若移除一台无人机,调用S3步骤,并计算方块的Objective Function,记为OF’;若OF‘大于OF,则移除一台无人机,反之不移除。
S442如果无人机之间的距离小于4×Rmax,计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的Objective Function记为OF;若增加一台无人机,调用S3步骤,并计算方块的Objective Function,记为OF’;若OF‘大于OF,则增加一台无人机,反之不增加;如不是,则距离大于4×Rmax不对无人机位置做任何调整。
由于划分时,只考虑了用户的数目,并没有考虑用户的位置,对于边界聚集用户等情况,我们需要增加合并方块的步骤,在合并的过程中,对于互相靠太近的无人机,我们考虑是否可以删减,对于还有较多的用户没有被覆盖考虑增加或者调整位置,来使得结果最优。
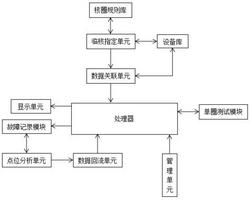
如图3所示,本发明的另一目的在于提供一种基于物理引力模型部署无人机增强基站通信的系统,所述系统包括
区域划分模块,用于利用KDivide的方法横竖交替切割对热点区域进行划分使得划分的每个小方块内用户数都满足单台无人机的容量;
计算判断划分模块,用于通过计算Objective Function判断划分的小方块内是否需要分配无人机,如是,则分配无人机并执行下一步,如否,则不分配无人机;
定位模块,用于根据EMech对没有被覆盖的用户定位无人机的位置;
合并模块,用于利用RMerge逆转区域划分模块过程对划分的小方块进行两两合并直至合并为初始热点区域的方块。
所述区域划分模块还包括
划分方向判断单元,用于判断切割划分是否划分方向,如未选择划分方向,则选择划分方向s,如已选择划分方向s’,则令s’=s;
容量判断单元,用于判断当前方块内的用户数是否超过单台无人机的容量,如超过,则根据划分方向s均匀划分当前方块并将划分方向置为垂直原方向的s’,如未超过,则停止该方块划分;
容量饱和单元,用于重复划分方向判断单元和容量判断单元的过程直到所有方块内的用户数均满足单台无人机的容量。
所述计算判断模块还包括
第一计算单元,用于计算当前方块的Objective Function并将其标记为OF;
第二计算单元,用于计算当前方块部署无人机后的Objective Function并将其标记为OF’;
大小判断单元,用于判断当前方块的OF与OF’的大小,如OF大于OF’,则分配无人机,如OF小于等于OF’,则不分配无人机。
所述计算判断模块还包括
选择位置单元,用于在给定方块中选择初始放入位置为随机位置;
合力计算单元,用于计算方块内用户群对无人机吸引力作用力的合力;
位移移动单元,用于根据无人机在吸引力合力的方向向上位移一段距离;
合力平衡点单元,用于重复合力计算单元和位移移动单元的过程使得用户群对无人机的作用力的合力达到平衡点的位置。
所述合并模块还包括
无人机分配单元,用于判断两两合并的小方块A、B之前是否分配无人机;如两个小方块A、B均没有分配无人机,则先合并两个方块构成新方块C,并调用计算判断划分模块过程判断新方块是否分配新的无人机;如两个小方块A、B一个含有无人机一个没有无人机,则先合并两个方块构成新方块C,在原分割线左右距离的矩形内构造方块C’,调用计算判断划分模块过程判断方块C,是否分配新的无人机,若不分配无人机,则调用定位模块过程调整方块内所有无人机的位置;如两个小方块A、B均分配有无人机,则先合并成新的方块C,在原分割线左右距离的矩形内构造方块C’,调用计算判断划分模块过程判断方块C,是否分配新的无人机,若不分配无人机,计算两两无人机之间的距离;
所述无人机分配单元还包括
第一距离计算单元,用于判断两个无人机之间的距离是否小于2×Rmax,如是,则计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的计算方块的Objective Function记为OF;若移除一台无人机,调用定位模块,并计算方块的ObjectiveFunction,记为OF’;若OF’大于OF,则移除一台无人机,反之不移除;如否,则执行下一步;
第二距离计算单元,用于判断两个无人机之间的距离是否小于4×Rmax,如是,则计算两台无人机的覆盖范围,根据覆盖范围的凸包构造方块,计算方块的ObjectiveFunction记为OF;若增加一台无人机,调用定位模块,并计算方块的Objective Function,记为OF’;若OF’大于OF,则增加一台无人机,反之不增加;如不是,则距离大于4×Rmax不对无人机位置做任何调整。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
基于物理引力模型部署无人机增强基站通信的方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0