









专利摘要
本发明公开了共轭凸轮曲柄摇杆组合花卉移栽机构及其设计方法。行星轮系移栽机构实现轨迹的灵活性受限;双环扣轨迹的杆机构设计和调节参数困难。本发明机构的第一共轭凸轮、第二共轭凸轮及曲柄的一端均通过凸轮轴铰接于机架;曲柄的另一端与第二连杆的中部铰接;第一凸轮摆杆、第二凸轮摆杆和摆动杆固接;第一凸轮摆杆通过第一滚子与第一共轭凸轮连接;第二凸轮摆杆通过第二滚子与第二共轭凸轮连接;摆动杆通过第一连杆与第二连杆的一端铰接。本发明设计方法:由第二连杆的自由端端点形成单环扣轨迹的数学模型、叉形摆杆与机架铰接点坐标及已知杆长条件反求共轭凸轮。本发明通过改变共轭凸轮轮廓控制摇杆运动规律,实现单环扣状轨迹,机构简单。
权利要求
1.共轭凸轮曲柄摇杆组合花卉移栽机构,其特征在于:包括凸轮轴、第一连杆、第二连杆、曲柄、叉形摆杆、第一滚子、第二滚子、第一共轭凸轮和第二共轭凸轮;所述的凸轮轴铰接在机架上,并由电机驱动;所述的第一共轭凸轮、第二共轭凸轮及曲柄的一端均与凸轮轴固接;曲柄的另一端与第二连杆的中部铰接;所述的叉形摆杆包括底端焊接在一起的摆动杆、第一凸轮摆杆和第二凸轮摆杆;叉形摆杆的底端铰接于机架;所述的第一滚子与第一凸轮摆杆的顶端铰接,并与第一共轭凸轮构成凸轮副;所述的第二滚子与第二凸轮摆杆的顶端铰接,并与第二共轭凸轮构成凸轮副;所述摆动杆的顶端与第一连杆的一端铰接;所述第一连杆的另一端与第二连杆的一端铰接;所述第二连杆的另一端自由设置并形成单环扣轨迹;
所述的单环扣轨迹为封闭且带有单环扣的平面圆滑曲线,包括依次顺序首尾连接的入钵段、取苗段、运苗段、植苗段和回复段;所述取苗段的起始点和结束点均为单环扣的开始点,其结束段为平行于穴盘盘口下侧壁且直线度为1mm/10mm的直线段;所述植苗段的起始点为植苗开始点,其起始段为竖直设置且直线度为1mm/10mm的直线段;所述的入钵段为取苗段的过渡段。
2.共轭凸轮曲柄摇杆组合花卉移栽机构的设计方法,其特征在于:该方法的具体步骤如下:
步骤一、构建共轭凸轮曲柄摇杆组合花卉移栽机构;
电机的动力传给铰接在机架上的凸轮轴,第一共轭凸轮、第二共轭凸轮及曲柄的一端均与凸轮轴固接;曲柄的另一端与第二连杆的中部铰接;叉形摆杆包括底端焊接在一起的摆动杆、第一凸轮摆杆和第二凸轮摆杆;叉形摆杆的底端铰接于机架;第一滚子与第一凸轮摆杆的顶端铰接,并与第一共轭凸轮构成凸轮副;第二滚子与第二凸轮摆杆的顶端铰接,并与第二共轭凸轮构成凸轮副;摆动杆的顶端与第一连杆的一端铰接;第一连杆的另一端与第二连杆的一端铰接;第二连杆的另一端自由设置;
步骤二、基于三次非均匀B样条曲线建立第二连杆的自由端端点所形成的单环扣轨迹数学模型;
选取n个数据点作为三次非均匀B样条曲线的型值点,可唯一求解到n+2个控制顶点,其中,n≥11;再选取步长为0.005~0.02中的一个值插值生成拟合点坐标,进而拟合出单环扣轨迹;建立第二连杆的自由端端点在坐标系XOY中所形成的位移方程为φf(t),其中,凸轮轴轴心为坐标系原点O;φf(t)在X和Y轴方向的位移分别为φfx(t)和φfy(t),t为沿取苗轨迹运动方向依次编号的拟合点序号,t=1时,第二连杆的自由端端点处于初始位置;
步骤三、通过所建立的单环扣轨迹数学模型反求出摆动杆的角位移j1,具体为:由步骤二中拟合出的φfx(t)、φfy(t),并设定L3、xa、ya的值,通过下式求得L1、L2、L4、L5、j1、j2、j3、j4;构造函数如下:
式(1)中,L1为摆动杆的杆长,L2为第一连杆的杆长,L3为第一连杆与第二连杆的铰接点至第二连杆与曲柄铰接点的距离,L4为曲柄的杆长,L5为第二连杆与曲柄的铰接点至第二连杆自由端端点的距离,xa、ya分别为叉形摆杆与机架铰接点的横坐标和纵坐标,j1为摆动杆的角位移,j2为第一连杆的角位移,j3为曲柄的角位移,j4为第二连杆的角位移;
步骤四、共轭凸轮反求模型的建立;
①设定摆动杆与第一凸轮摆杆之间的夹角α以及摆动杆与第二凸轮摆杆之间的夹角β,由摆动杆的角位移j1求得第一凸轮摆杆的摆角φ1和第二凸轮摆杆的摆角φ2,如下式:
②设定L6、L7、L8,通过下式求得第一共轭凸轮的理论轮廓坐标x1、y1和第二共轭凸轮的理论轮廓坐标x2、y2;
式(3)和(4)中,L6为机架的杆长,L7为第一凸轮摆杆的杆长,L8为第二凸轮摆杆的杆长;φ3为叉形摆杆相对或曲柄的角位移,其值与曲柄的角位移j3相等;
③求得第一共轭凸轮和第二共轭凸轮的工作廓线坐标;因为凸轮工作廓线与理论廓线在法线上的距离等于滚子半径,故已知凸轮理论廓线上点的坐标,实际廓线坐标只要沿理论廓线在该点的法线方向取距离为滚子半径即可;
步骤五、校验共轭凸轮曲柄摇杆组合花卉移栽机构是否满足杆长条件,如下式:
说明书
技术领域
本发明属于农业机械领域,涉及花卉移栽方法,具体涉及一种共轭凸轮曲柄摇杆组合花卉移栽机构及其设计方法。
背景技术
花卉移栽技术可以减少作物的生长周期,保持作物的品质统一,达到增产增收的目的,已成为现代温室盆栽花卉生产中主要的种植措施。发展自动化盆栽花卉移栽技术是顺应盆栽花卉生产高增长率的趋势,解决现有的低生产率和推进我过农业现代化的重要举措。随着我国花卉生产和设施农业技术发展,目前已具备了大力发展自动化盆栽花卉移栽技术的基础和条件。
现有的单自由度间歇齿轮行星轮系和连续非圆齿轮行星轮系移栽机构受齿轮传动比的限制所能实现轨迹的灵活性受限,欲利用一套机构实现穴盘取苗和往花盘中植苗工作机构设计的难度大;混合驱动机构虽然由于存在两个自由度,轨迹设计的灵活性大,但机器的控制系统不易设计。杆机构的轨迹设计较灵活,若通过机构参数的优化,利用一套多杆机构实现从穴盘取苗和植入花盘功能则能大大简化机械结构。为了设计既可以完成植苗、取苗动作的机构,从而需要在花卉移栽轨迹上进行改进,双环扣轨迹的杆机构设计和调节参数较困难,往往需要双自由度或复杂的传递机构,然而可以通过改变取苗轨迹的方向(取苗机构由顺时针运动改为逆时针运动)和形状设计新的机构,也能很好地完成花卉植苗、取苗动作。
发明内容
本发明的目的是针对现有技术的不足,提供一种共轭凸轮曲柄摇杆组合花卉移栽机构及其设计方法,该共轭凸轮曲柄摇杆组合花卉移栽机构采用共轭凸轮连杆组合的方式,通过改变机构参数来控制摇杆的运动规律,并且摇杆满足在花卉移栽周期内单次摆动,实现单环扣轨迹,从而实现取苗和植苗动作,使得机构轨迹更利于机构实现,并且可以实现其他瓜果、蔬菜、花卉等作物的全自动移栽。该共轭凸轮曲柄摇杆组合花卉移栽机构设计方法首先构建共轭凸轮曲柄摇杆组合花卉移栽机构,建立第二连杆的端点形成单环扣轨迹的数学模型;然后通过所建立的单环扣轨迹数学模型反求出叉形摆杆的角位移;共轭凸轮反求模型的建立;校验共轭凸轮曲柄摇杆组合花卉移栽机构是否满足杆长条件。
为解决上述技术问题,本发明的技术方案是:
本发明的共轭凸轮曲柄摇杆组合花卉移栽机构,包括凸轮轴、第一连杆、第二连杆、曲柄、叉形摆杆、第一滚子、第二滚子、第一共轭凸轮和第二共轭凸轮;所述的凸轮轴铰接在机架上,并由电机驱动;所述的第一共轭凸轮、第二共轭凸轮及曲柄的一端均与凸轮轴固接;曲柄的另一端与第二连杆的中部铰接;所述的叉形摆杆包括底端焊接在一起的摆动杆、第一凸轮摆杆和第二凸轮摆杆;叉形摆杆的底端铰接于机架;所述的第一滚子与第一凸轮摆杆的顶端铰接,并与第一共轭凸轮构成凸轮副;所述的第二滚子与第二凸轮摆杆的顶端铰接,并与第二共轭凸轮构成凸轮副;所述摆动杆的顶端与第一连杆的一端铰接;所述第一连杆的另一端与第二连杆的一端铰接;所述第二连杆的另一端自由设置并形成单环扣轨迹。
所述的单环扣轨迹为封闭且带有单环扣的平面圆滑曲线,包括依次顺序首尾连接的入钵段、取苗段、运苗段、植苗段和回复段;所述取苗段的起始点和结束点均为单环扣的开始点,其结束段为平行于穴盘盘口下侧壁且直线度为1mm/10mm的直线段;所述植苗段的起始点为植苗开始点,其起始段为竖直设置且直线度为1mm/10mm的直线段;所述的入钵段为取苗段的过渡段。
本发明的共轭凸轮曲柄摇杆组合花卉移栽机构设计方法,具体步骤如下:
步骤一、构建共轭凸轮曲柄摇杆组合花卉移栽机构。
电机的动力传给铰接在机架上的凸轮轴,第一共轭凸轮、第二共轭凸轮及曲柄的一端均与凸轮轴固接;曲柄的另一端与第二连杆的中部铰接;叉形摆杆包括底端焊接在一起的摆动杆、第一凸轮摆杆和第二凸轮摆杆;叉形摆杆的底端铰接于机架;第一滚子与第一凸轮摆杆的顶端铰接,并与第一共轭凸轮构成凸轮副;第二滚子与第二凸轮摆杆的顶端铰接,并与第二共轭凸轮构成凸轮副;摆动杆的顶端与第一连杆的一端铰接;第一连杆的另一端与第二连杆的一端铰接;第二连杆的另一端自由设置。
步骤二、基于三次非均匀B样条曲线建立第二连杆的自由端端点所形成的单环扣轨迹数学模型。
选取n个数据点作为三次非均匀B样条曲线的型值点,可唯一求解到n+2个控制顶点,其中,n≥11;再选取步长为0.005~0.02中的一个值插值生成拟合点坐标,进而拟合出单环扣轨迹;建立第二连杆的自由端端点在坐标系XOY中所形成的位移方程为φf(t),其中,凸轮轴轴心为坐标系原点O;φf(t)在X和Y轴方向的位移分别为φfx(t)和φfy(t),t为沿取苗轨迹运动方向依次编号的拟合点序号,t=1时,第二连杆的自由端端点处于初始位置。
步骤三、通过所建立的单环扣轨迹数学模型反求出摆动杆的角位移j1,具体为:由步骤二中拟合出的φfx(t)、φfy(t),并设定L3、xa、ya的值,通过下式求得L1、L2、L4、L5、j1、j2、j3、j4。构造函数如下:
式(1)中,L1为摆动杆的杆长,L2为第一连杆的杆长,L3为第一连杆与第二连杆的铰接点至第二连杆与曲柄铰接点的距离,L4为曲柄的杆长,L5为第二连杆与曲柄的铰接点至第二连杆自由端端点的距离,xa、ya分别为叉形摆杆与机架铰接点的横坐标和纵坐标,j1为摆动杆的角位移,j2为第一连杆的角位移,j3为曲柄的角位移,j4为第二连杆的角位移。
步骤四、共轭凸轮反求模型的建立。
①设定摆动杆与第一凸轮摆杆之间的夹角α以及摆动杆与第二凸轮摆杆之间的夹角β,由摆动杆的角位移j1求得第一凸轮摆杆的摆角φ1和第二凸轮摆杆的摆角φ2,如下式:
②设定L6、L7、L8,通过下式求得第一共轭凸轮的理论轮廓坐标x1、y1和第二共轭凸轮的理论轮廓坐标x2、y2。
式(3)和(4)中,L6为机架的杆长,L7为第一凸轮摆杆的杆长,L8为第二凸轮摆杆的杆长;φ3为叉形摆杆相对或曲柄的角位移,其值与曲柄的角位移j3相等。
③求得第一共轭凸轮和第二共轭凸轮的工作廓线坐标。因为凸轮工作廓线与理论廓线在法线上的距离等于滚子半径,故已知凸轮理论廓线上点的坐标,实际廓线坐标只要沿理论廓线在该点的法线方向取距离为滚子半径即可。
步骤五、校验共轭凸轮曲柄摇杆组合花卉移栽机构是否满足杆长条件,如下式:
本发明的有益效果:
1、本发明的共轭凸轮曲柄摇杆组合花卉移栽机构实现单环扣状轨迹,在轨迹的取苗段设计一个环扣状轨迹来满足取苗要求,在轨迹的植苗段设计一段竖直线来保证穴盘苗垂直植入花盘,植苗直立度有了很大的提升,保证花卉植苗合适的角度、速度、植苗的直立度,更好地满足花卉移栽的农艺要求。
2、本发明实现的单环扣状轨迹满足钵苗移栽机平入钵、直拔苗、稳植苗的移栽农艺要求;通过改变共轭凸轮的轮廓来控制摇杆的运动规律,实现单环扣轨迹,机构简单,易于控制,使得取苗和植苗的动作更加灵活,柔度高,为实现其他农作物的移栽机械通用化取得了突破,从而实现花卉、瓜果、蔬菜等作物的全自动移栽。
附图说明
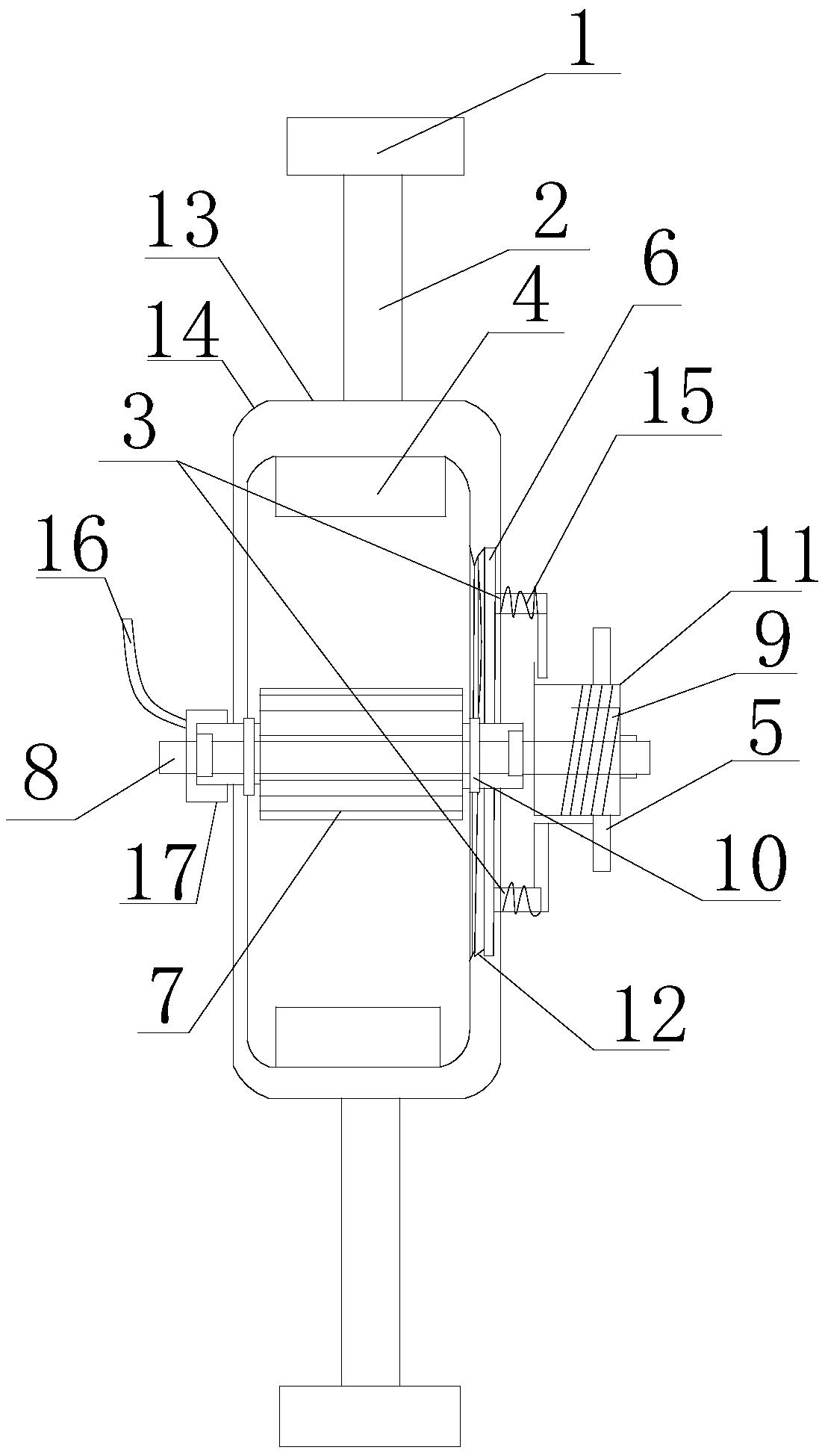
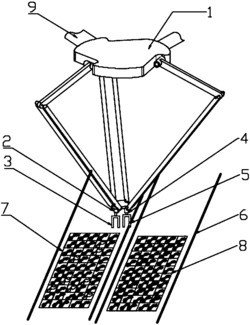
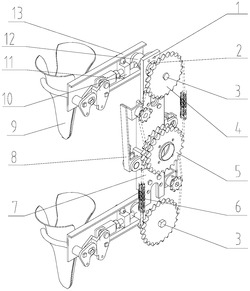
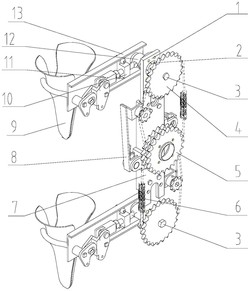
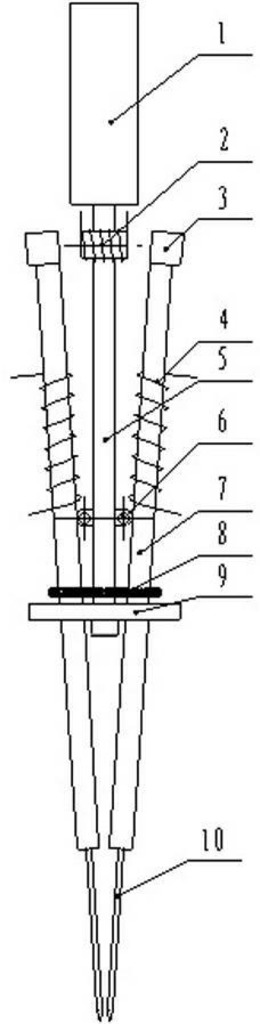
图1为本发明在初始位置的机构原理图。
图2为本发明的移栽轨迹示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步说明。
如图1和2所示,共轭凸轮曲柄摇杆组合花卉移栽机构,包括凸轮轴、第一连杆2、第二连杆3、曲柄4、叉形摆杆、第一滚子6、第二滚子7、第一共轭凸轮8和第二共轭凸轮9;凸轮轴铰接在机架5上,并由电机M1驱动;第一共轭凸轮8、第二共轭凸轮9及曲柄4的一端均与凸轮轴固接;曲柄4的另一端与第二连杆3的中部铰接;叉形摆杆包括底端焊接在一起的摆动杆1、第一凸轮摆杆和第二凸轮摆杆;叉形摆杆的底端铰接于机架5;第一滚子6与第一凸轮摆杆的顶端铰接,并与第一共轭凸轮8构成凸轮副;第二滚子7与第二凸轮摆杆的顶端铰接,并与第二共轭凸轮9构成凸轮副;摆动杆1的顶端与第一连杆2的一端铰接;第一连杆2的另一端与第二连杆3的一端铰接;第二连杆3的另一端自由设置并形成单环扣轨迹。
该共轭凸轮曲柄摇杆组合花卉移栽机构的设计方法,具体步骤如下:
步骤一、构建共轭凸轮曲柄摇杆组合花卉移栽机构。
电机M1的动力传给铰接在机架5上的凸轮轴,第一共轭凸轮8、第二共轭凸轮9及曲柄4的一端均与凸轮轴固接;曲柄4的另一端与第二连杆3的中部铰接;叉形摆杆包括底端焊接在一起的摆动杆1、第一凸轮摆杆和第二凸轮摆杆;叉形摆杆的底端铰接于机架5;第一滚子6与第一凸轮摆杆的顶端铰接,并与第一共轭凸轮8构成凸轮副;第二滚子7与第二凸轮摆杆的顶端铰接,并与第二共轭凸轮9构成凸轮副;摆动杆1的顶端与第一连杆2的一端铰接;第一连杆2的另一端与第二连杆3的一端铰接;第二连杆3的另一端自由设置。
叉形摆杆在第一共轭凸轮8与第一滚子6、第二共轭凸轮9与第二滚子7的共同作用下摆动,并将动力经过第一连杆2和第二连杆3传至第二连杆3自由端端点F处,端点F的运动规律由第一共轭凸轮8和第二共轭凸轮9的凸轮轮廓控制。
步骤二、基于三次非均匀B样条曲线建立第二连杆3的自由端端点F所形成的单环扣轨迹数学模型。
如图2所示,选取十一个数据点q0、q1、q2、q3、q4、q5、q6、q7、q8、q9和q10作为三次非均匀B样条曲线的型值点,其中,q0和q10重合,可唯一求解到十三个控制顶点,再选取步长为0.005~0.02中的一个值插值生成拟合点坐标,进而拟合出单环扣轨迹。
由花卉移栽农艺要求选取十一个数据点如下:q0和q10确定单环扣轨迹的最高点,q1确定单环扣轨迹的取苗开始点,q2是影响取苗前轨迹姿态的关键点,q3确定单环扣轨迹的取苗时刻点,q4确定单环扣轨迹的最低点,q5确定单环扣轨迹的植苗结束点,q6确定单环扣轨迹的植苗开始点,q7、q8和q9是单环扣轨迹的辅助拟合点;拟合出第二连杆3的自由端端点F在坐标系XOY中所形成的位移方程为φf(t),其中,凸轮轴轴心为坐标系原点O;φf(t)在X和Y轴方向的位移分别为φfx(t)和φfy(t),t为沿取苗轨迹运动方向依次编号的拟合点序号,t=1时,第二连杆3的自由端端点F处于如图1所示的初始位置。
单环扣轨迹为封闭且带有单环扣的平面圆滑曲线,包括依次顺序首尾连接的入钵段2-1、取苗段2-2、运苗段2-3、植苗段2-4和回复段2-5;取苗段2-2的起始点和结束点均为单环扣的开始点,其结束段为平行于穴盘盘口下侧壁且直线度为1mm/10mm的直线段,保证沿垂直土钵方向取出幼苗;植苗段2-4的起始点为植苗开始点,其起始段为竖直设置且直线度为1mm/10mm的直线段,保证幼苗与栽植机构只存在沿竖直方向的相对速度,利于垂直将苗直接植入花盘;入钵段2-1为取苗段2-2的过渡段;可见,该花卉移栽轨迹可以满足花卉钵苗移栽中取苗的平入钵、直取苗及稳植苗的要求。
该共轭凸轮曲柄摇杆组合花卉移栽机构中,第二连杆3的自由端安装栽植机构即可进行栽植作业,且移栽轨迹满足花卉钵苗移栽中取苗的平入钵、直取苗及稳植苗的要求。
步骤三、通过所建立的单环扣轨迹数学模型反求出摆动杆1的角位移j1,具体为:由步骤二中拟合出的φfx(t)、φfy(t),并设定L3、xa、ya的值,通过下式求得L1、L2、L4、L5、j1、j2、j3、j4。构造函数如下:
式(1)中,L1为摆动杆1的杆长,L2为第一连杆2的杆长,L3为第一连杆2与第二连杆3的铰接点至第二连杆3与曲柄4铰接点的距离,L4为曲柄4的杆长,L5为第二连杆3与曲柄4的铰接点至第二连杆3自由端端点F的距离,xa、ya分别为叉形摆杆与机架铰接点A的横坐标和纵坐标,j1为摆动杆1的角位移,j2为第一连杆2的角位移,j3为曲柄4的角位移,j4为第二连杆3的角位移。
步骤四、共轭凸轮反求模型的建立。
①设定摆动杆1与第一凸轮摆杆之间的夹角α以及摆动杆1与第二凸轮摆杆之间的夹角β,由摆动杆1的角位移j1求得第一凸轮摆杆的摆角φ1和第二凸轮摆杆的摆角φ2,如下式:
②设定L6、L7、L8,通过下式求得第一共轭凸轮8的理论轮廓坐标x1、y1和第二共轭凸轮9的理论轮廓坐标x2、y2。
式(3)和(4)中,L6为机架5的杆长,L7为第一凸轮摆杆的杆长,L8为第二凸轮摆杆的杆长;φ3为叉形摆杆相对共轭凸轮(或曲柄)的角位移,其值与曲柄的角位移j
共轭凸轮曲柄摇杆组合花卉移栽机构的设计方法专利购买费用说明
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
![]()









动态评分
0.0