








专利摘要
本发明公开了无人机领域,本发明提供一种平稳升降的无人机装置及控制方法,本发明的平稳升降的无人机装置包括多个辅助螺旋桨,所述辅助螺旋桨以十字形机架为中心,对称布置于无人机机体周围,辅助螺旋桨的旋转平面垂直于水平面,且辅助螺旋桨的旋转平面方向可调。本发明通过增加辅助螺旋桨的方式,有效解决了无人机受到来自水平面方向上的干扰而发生偏移的问题,实现了无人机在垂直方向上的平稳升降,同时减少了无人机升降时间,提高了无人机在恶劣环境下升降时抗干扰的能力,有效避免了无人机因受到干扰而发生的偏移甚至撞毁的问题。
权利要求
1.一种平稳升降的无人机装置的控制方法,其特征在于,该平稳升降的无人机装置为十字形机架结构的四旋翼无人机,所述十字形机架上安装有四个主螺旋桨,还包括多个可提供各方向作用力的辅助螺旋桨,所述辅助螺旋桨以十字形机架为中心,对称布置于无人机机体周围,辅助螺旋桨的旋转平面垂直于水平面,且辅助螺旋桨的旋转平面方向可调,在控制该平稳升降的无人机装置时,包括以下步骤:
a、通过主控单元启动无人机主螺旋桨;
b、主螺旋桨的旋转平面平行于水平面,为无人机提供向上的拉力,无人机上升进入起飞阶段,再通过主控单元启动辅助螺旋桨,为无人机提供水平方向上的作用力;
c、无人机上自带有环境监测系统,通过环境监测系统对外部环境进行监测,主控单元根据外部环境情况及时调整辅助螺旋桨的旋转平面方向,在平稳环境下,主控单元将辅助螺旋桨的旋转平面方向调整为平行于水平面,为无人机提供垂直方向上的作用力,减短无人机的升降时间,在恶劣环境下,主控单元将辅助螺旋桨的旋转平面方向调整为垂直于水平面,为无人机提供水平方向上的作用力,使无人机机身在水平面各方向的速度及加速度为零,确保无人机平稳上升;
d、无人机完成飞行后,在下降时,无人机自带的环境监测系统对外部环境进行监测,主控单元根据外部环境及时调整辅助螺旋桨的旋转平面方向,在平稳环境下,主控单元将辅助螺旋桨的旋转平面方向调整为平行于水平面,为无人机提供垂直方向上的作用力,减短无人机的升降时间,在恶劣环境下,主控单元将辅助螺旋桨的旋转平面方向调整为垂直于水平面,为无人机提供水平方向上的作用力,使无人机机身在水平面各方向的速度及加速度为零,确保无人机平稳降落;
e、无人机降落后,通过主控单元关闭主螺旋桨和辅助螺旋桨。
2.根据权利要求1所述的平稳升降的无人机装置的控制方法,其特征在于,所述辅助螺旋桨安装于十字形机架上,且辅助螺旋桨的旋转平面垂直于所在机架的轴线。
3.根据权利要求2所述的平稳升降的无人机装置的控制方法,其特征在于,所述辅助螺旋桨为4个,对称布置于十字形机架的端部。
4.根据权利要求2所述的平稳升降的无人机装置的控制方法,其特征在于,所述辅助螺旋桨还配置有可调底座,用于调整辅助螺旋桨的旋转平面方向,所述可调底座安装于无人机装置的机架上。
5.根据权利要求4所述的平稳升降的无人机装置的控制方法,其特征在于,所述可调底座使用方向可调整装置,所述方向可调整装置是指方向随调节电压进行控制的动力装置。
6.根据权利要求5所述的平稳升降的无人机装置的控制方法,其特征在于,所述方向可调整装置为舵机。
7.根据权利要求3或6所述的平稳升降的无人机装置的控制方法,其特征在于,无人机装置还配置有用于测量速度和加速度的感知器件。
8.根据权利要求7所述的平稳升降的无人机装置的控制方法,其特征在于,无人机装置还配置有脉冲宽度调制器。
9.根据权利要求2所述的平稳升降的无人机装置的控制方法,其特征在于,无人机装置还设有用于远程监测和控制无人机运行的地面控制装置,所述地面控制装置包括显示屏、存储器以及操作界面。
说明书
技术领域
本发明涉及无人机领域,特别涉及一种平稳升降的无人机装置及控制方法。
背景技术
无人机又称为无人驾驶飞机、远程遥控或自巡航飞机,是一种成本低、损耗小、机动性高的可携带负载飞行器,已被广泛应用于军事、科研、民用等多种领域。在军事领域,无人机可应用于敌情侦查、通讯中继、早期预警、靶机训练等,甚至可直接组成无人机编队进行对敌作战;在科研领域,可用于飞行试验的验证、新设备及新方案的可行性模拟评估、航拍图像的获取、恶劣环境下的取样及条件监测等;在民用领域,无人机可用于农业墒情监测、农业施肥、灾情分析、工程监理、电网线路巡视等。在一些实际应用中,无人机技术已经取得了相当好的成果,人们已逐渐认识到它的巨大潜力与作用。
四旋翼无人机作为无人机的一种,通过安装在十字形机架结构四个顶端的主螺旋桨,产生气动力,控制四翼无人机的飞行动作,能实现垂直起降、自由悬停、前进、倒退、超低空飞行等多种空中姿态。如图1所示,四个主螺旋桨处在同一高度平面,第一螺旋桨1和第三主螺旋桨3逆时针旋转,第二主螺旋桨2和第四主螺旋桨4顺时针旋转,无人机上设置有主控单元,主控单元通过控制主螺旋桨的转速,即可实现对四翼无人机飞行姿态的控制。四旋翼无人机以其新颖的外形及紧凑的结构,被认为是一种最简单、最直观的稳定控制形式。
这种无人机技术虽具有研发成本低、可实施性强、使用范围广、操作要求低等优点,但在实际应用中,无人机却普遍存在受升降环境影响的缺点,在升降时,由于主螺旋桨只提供向上的拉力,用以克服无人机自身的重力,牵引机体向上运动,在水平方向上的抗干扰能力较弱,无人机在水平面(机体的前、后、左、右)方向由于受到风力的影响,难以实现无人机垂直方向的平稳升降。尤其在恶劣环境下进行起飞和降落时,无人机的抗干扰能力更差,无人机往往受到来自水平面方向上的干扰而发生偏移甚至撞毁的现象。
发明内容
本发明的目的在于克服现有技术中所存在的四旋翼飞行器在起飞和降落时,主螺旋桨只提供向上的拉力,在升降时抗干扰能力较弱,无人机受到来自水平面方向上风力等因素的干扰而发生偏移的问题,提供一种平稳升降的无人机装置及控制方法,该无人机装置在水平方向上的抗干扰能力较强,在垂直方向上实现平稳升降,而且减少了无人机的升降时间,增加了无人机在恶劣环境下升降时抗干扰的能力,有效避免了无人机受到干扰而发生偏移甚至撞毁的现象。
为了实现上述发明目的,本发明提供了以下技术方案:
一种平稳升降的无人机装置,包括多个辅助螺旋桨,所述辅助螺旋桨以十字形机架为中心,对称布置于无人机机体周围,辅助螺旋桨的旋转平面垂直于水平面,且辅助螺旋桨的旋转平面方向可调。
无人机装置上设置有控制各个系统单元工作的主控单元,通过主控单元控制主螺旋桨和辅助螺旋桨转动,同时对螺旋桨的转速进行调节,主螺旋桨提供向上的拉力,用以克服无人机自身的重力,牵引无人机机体向上运动,辅助螺旋桨用以克服水平方向上外界环境的干扰,增强无人机在水平方向上的抗干扰能力,通过主控单元对辅助螺旋桨的转速控制,使无人机机身在水平面各方向的速度及加速度为零,确保无人机在垂直方向上完成升降动作,同时,辅助螺旋桨的旋转平面的方向可调,使无人机装置根据实际情况,可改变辅助螺旋桨的旋转平面方向,使其提供的动力方向可调,不仅可以在水平面上提供动力,而且可以同时为无人机提供垂直方向上的作用力,减短无人机的升降时间,使无人机在较短时间内完成升降,减小了无人机受到外界干扰的几率,增加了无人机抗干扰的能力。
优选的,所述辅助螺旋桨安装于十字形机架上,且辅助螺旋桨的旋转平面垂直于所在机架的轴线。
辅助螺旋桨安装于十字形机架上,与主螺旋桨共用同一个十字形机架,采取这种方式可以简化无人机装置的结构,不需要增加额外的机架用于安装辅助螺旋桨,辅助螺旋桨旋转形成的旋转平面垂直于水平面,且同时垂直于所在十字形机架的轴线,实现辅助螺旋桨的效率最大化,使辅助螺旋桨只提供水平方向上的作用力,在水平方向上的作用力达到最大,从而有效调节无人机在水平方向上受到的外力,保证无人机在水平方向上的速度和加速度为零,便于无人机在垂直方向上平稳完成升降动作。
优选的,所述辅助螺旋桨为4个,对称布置于十字形机架的端部。在每个安装主螺旋桨的机架外端部安装辅助螺旋桨,保证在不增加安装支架的基础上,使每个辅助螺旋桨的旋转平面垂直于所在机架的轴线,保证辅助螺旋桨的旋转平面垂直于机架轴线,使无人机的辅助螺旋桨在调节水平方向上受到的外界干扰时,可以提高调节速度和功率,在恶劣环境下,同一机架轴线上的两个辅助螺旋桨可提供相同方向上的速度和加速度,用以克服无人机在某一方向上受到的较大外力。
优选的,所述辅助螺旋桨还配置有可调底座,用于调整和改变辅助螺旋桨的旋转平面方向,所述可调底座安装于无人机装置的机架上。
在辅助螺旋桨上配置可调底座,用于调整和改变辅助螺旋桨的旋转平面方向,使辅助螺旋桨的作用力方向可以发生改变,无人机在平稳环境状态下进行升降时,通过主控单元对可调底座的控制,改变辅助螺旋桨的旋转平面方向,使辅助螺旋桨的旋转平面平行与主螺旋桨的旋转平面,辅助螺旋桨和主螺旋桨同时为无人机的升降提供向上或向下的拉力,从而减少无人机在平稳环境下的升降时间,达到提高无人机在起飞和降落时的工作效率。在恶劣环境起飞降落的过程中,主螺旋桨用于产生向上或向下的拉力,通过调整可调底座,使辅助螺旋桨的旋转平面垂直于水平面,从而为无人机提供水平方向上的作用力,保证无人机在水平方向上的速度和加速度为零,使无人机在垂直方向上完成平稳起飞和降落。
优选的,所述可调底座使用方向可调整装置,所述方向可调整装置是指方向随调节电压进行控制的动力装置。无人机在起飞和降落过程中,安装在无人机上的检测装置首先测得在各个方向上的作用力大小,然后通过转化系统将机械作用力转化为电压信号,方向可调整装置即根据调节电压来输出作用力,得到控制方向的目的,从而使可调底座的方向得到有效调整。
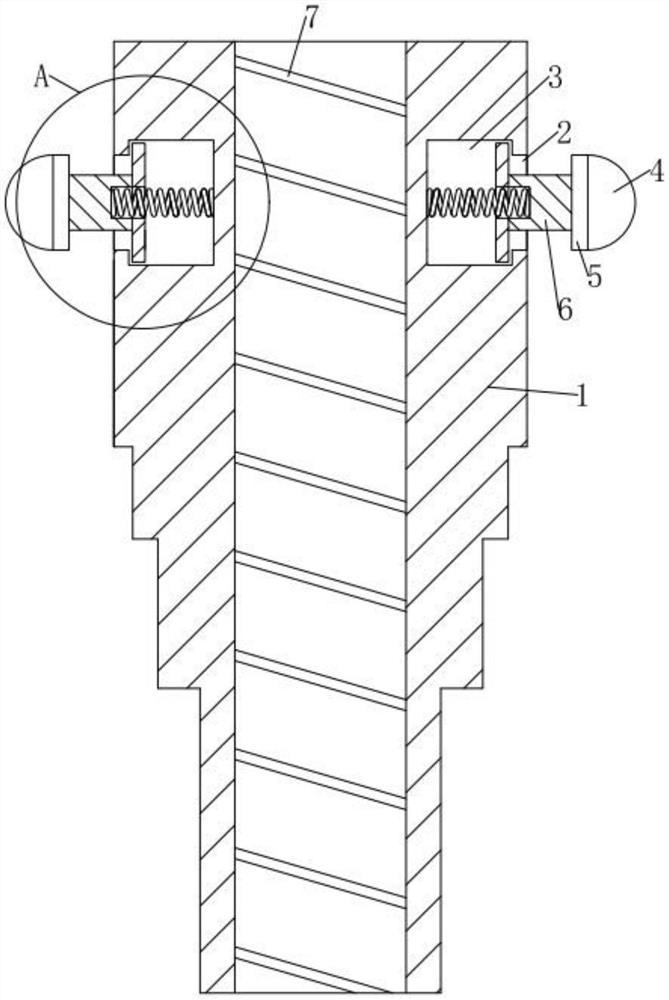
优选的,所述方向可调整装置为舵机。使用舵机作为可调底座,舵机控制电路板接收来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘,舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止,以便实现辅助螺旋桨作用力方向的有效控制。
优选的,所述无人机装置还设置有用于测量速度和加速度的感知器件。使用陀螺仪、惯性测量单元等作为对无人机速度和加速度进行感知的传感器器件及单元,对无人机三维空降各方向(前、后、左、右、上、下)的速度和加速度进行测量,作为无人机飞行状态的反馈量,然后在主控单元引入智能算法,根据速度和加速度感知单元的反馈量进行计算,进而转化为系统调整单元的调节量,通过无人机上的主控单元对辅助螺桨的转速进行调节,用以抵消无人机在水平方向上所受的环境干扰,确保无人机的垂直升降。
优选的,所述无人机装置还配置有脉冲宽度调制器。使用脉冲宽度调制器对无人机各方向的辅助螺旋桨的转速进行精确调整,从而使机身水平面各方向的速度及加速度为零,确保无人机在垂直方向上完成升降动作。
优选的,所述无人机装置还设有用于远程监测和控制无人机运行的地面控制装置,所述地面控制装置包括显示屏、存储器以及操作界面。通过地面控制装置的操作界面向主控单元发送控制执行信号,同时接收由主控单元回传回来的各个系统单元的工作状态信息,并通过显示屏显示查看,这些回传回来的信息存储于存储器中。
相应地,本发明还提供了一种平稳升降的无人机装置的控制方法,该方法包括以下步骤:
a、通过主控单元启动无人机主螺旋桨;
b、主螺旋桨的旋转平面平行于水平面,为无人机提供向上的拉力,无人机上升进入起飞阶段,再通过主控单元启动辅助螺旋桨,为无人机提供水平方向上的作用力;
c、无人机上自带有环境监测系统,通过环境监测系统对外部环境进行监测,主控单元根据外部环境情况及时调整辅助螺旋桨的旋转平面方向,在平稳环境下,主控单元将辅助螺旋桨的旋转平面方向调整为平行于水平面,为无人机提供垂直方向上的作用力,减短无人机的升降时间,在恶劣环境下,主控单元将辅助螺旋桨的旋转平面方向调整为垂直于水平面,为无人机提供水平方向上的作用力,使无人机机身在水平面各方向的速度及加速度为零,确保无人机平稳上升;
d、无人机完成飞行后,在下降时,无人机自带的环境监测系统对外部环境进行监测,主控单元根据外部环境及时调整辅助螺旋桨的旋转平面方向,在平稳环境下,主控单元将辅助螺旋桨的旋转平面方向调整为平行于水平面,为无人机提供垂直方向上的作用力,减短无人机的升降时间,在恶劣环境下,主控单元将辅助螺旋桨的旋转平面方向调整为垂直于水平面,为无人机提供水平方向上的作用力,使无人机机身在水平面各方向的速度及加速度为零,确保无人机平稳降落;
e、无人机降落后,通过主控单元关闭主螺旋桨和辅助螺旋桨。
采取上述方式,使无人机在平稳环境下升降时,减短升降时间,使无人机免受外界环境的影响,在恶劣环境下升降时,能增强无人机的抗干扰能力,完成平稳升降。
与现有技术相比,本发明的有益效果:
1、在无人机上设置用于克服水平方向上外界环境干扰的辅助螺旋桨,主螺旋桨提供向上的拉力,用以克服无人机自身的重力,牵引机体向上运动,辅助螺旋桨用以克服水平方向上外界环境的干扰,增强无人机在水平方向上的抗干扰能力,通过辅助螺旋桨的转速控制,使无人机机身在水平面各方向的速度及加速度为零,确保无人机在垂直方向上完成升降动作;
2、辅助螺旋桨上配置可调底座,使辅助螺旋桨的作用力方向发生改变,在平稳环境状态下进行升降时,调整底座的方向,使辅助螺旋桨和主螺旋桨同时为无人机的升降提供向上或向下的拉力,从而减少无人机在平稳环境下的升降时间,在恶劣环境起飞降落的过程中,主螺旋桨用于产生向上或向下的拉力,通过调整底座的方向,使辅助螺旋桨为无人机提供水平方向上的作用力,保证无人机在水平方向上的速度和加速度为零,便于无人机在垂直方向上完成升降动作;
3、无人机装置配置有速度和加速度感知器件,当外界环境影响无人机在水平方向上发生偏移时,根据无人机自身的速度及加速度感知器件,使用智能算法对风速在水平面各方向上的分量大小进行计算,使用配置在无人机装置上的脉冲宽度调制器对各方向的辅助螺旋桨进行调整,使机身水平面各方向的速度和加速度为零,使无人机易于升降,提高了抗干扰能力。
附图说明:
图1为现有的四旋翼无人机的结构原理图。
图2为实施例1中的无人机装置的结构原理图。
图3为实施例2中的无人机装置的结构原理图。
图4为实施例3中的无人机装置的结构原理图。
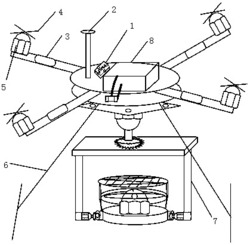
图中标记:1-第一主螺旋桨,2-第二主螺旋桨,3-第三主螺旋桨,4-第四主螺旋桨,5-第一辅助螺旋桨,6-第二辅助螺旋桨,7-第三辅助螺旋桨,8-第四辅助螺旋桨,9-第一可调底座,10-第二可调底座,11-第三可调底座,12-第四可调底座。
具体实施方式
下面结合试验例及具体实施方式对本发明作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施例,凡基于本发明内容所实现的技术均属于本发明的范围。
实施例1
本实施例用于无人机在环境恶劣、风速大的情况下起飞或降落。
如图2所示,升降时抗干扰的无人机装置,包括多个辅助螺旋桨,所述辅助螺旋桨以十字形机架为中心,对称布置于无人机机体周围,辅助螺旋桨的旋转平面垂直于水平面,且辅助螺旋桨的旋转平面方向可调。无人机上设置有4个主螺旋桨,分别为第一主螺旋桨1、第二主螺旋桨2、第三主螺旋桨3、第四主螺旋桨4,且四个主螺旋桨布置于十字形机架结构上,将十字形机架的布置平面看作直角坐标平面,则第一主螺旋桨1和第三主螺旋桨3分别布置在X轴的正负方向上,从俯视方向看,主螺旋桨旋转方向为逆时针旋转,旋转平面平行于水平面,为无人机提供向上的拉力,用以克服无人机自身的重力。第二主螺旋桨2和第四主螺旋桨4分别布置在Y轴的正负方向上,从俯视方向看,主螺旋桨旋转方向为顺时针方向,旋转平面平行于水平面,为无人机提供向上的拉力,用以克服无人机自身的重力。
辅辅助螺旋桨安装于十字形机架上,且辅助螺旋桨的旋转平面垂直于所在机架的轴线,如图2所示,辅助螺旋桨为4个,对称布置于十字形机架的4个端部,第一辅助螺旋桨5和第三辅助螺旋桨7分别布置在X轴的正负方向上,且位于第一主螺旋桨1和第三主螺旋桨3的外侧,辅助螺旋桨旋转形成的旋转平面垂直于水平面,同时垂直于X轴的轴线,用以提供水平方向上的作用力,第二辅助螺旋桨6和第四辅助螺旋桨8分别布置在Y轴的正负方向上,且位于第二主螺旋桨2和第四主螺旋桨4的外侧,辅助螺旋桨旋转形成的平面垂直于水平面,同时垂直于Y轴的轴线。无人机在环境恶劣、风速大的情况下起飞或者降落时,第二辅助螺旋桨5、第二辅助螺旋桨6、第三辅助螺旋桨7和第四辅助螺旋桨8用以克服水平方向上外界环境的干扰,增强无人机在水平方向上的抗干扰能力,通过主控单元对辅助螺旋桨的转速控制,使无人机机身在水平面各方向的速度及加速度为零,确保无人机在垂直方向上完成起飞或降落。
在本实施例中,辅助螺旋桨与主螺旋桨安装于同一根十字形机架上,采取这种方式可以简化无人机装置的结构,不需要增加额外的机架用于安装辅助螺旋桨,同时通过主控单元调整辅助螺旋桨旋转形成的平面垂直于水平面,且垂直于所在十字形机架的轴线,有效实现辅助螺旋桨的效率最大化,使辅助螺旋桨只提供水平方向上的作用力,在水平方向上的作用力达到最大化,最大程度上发挥辅助螺旋桨克服水平方向上风速干扰的优势。
无人机装置配置有用于测量速度和加速度的感知器件,使用陀螺仪、惯性测量单元等作为对无人机速度和加速度进行感知的传感器器件及单元,同时,无人机装置还配置有脉冲宽度调制器,使用陀螺仪、惯性测量单元对无人机三维空降各方向(前、后、左、右、上、下)的速度和加速度进行测量,作为无人机飞行状态的反馈量,然后在主控单元引入智能算法,根据速度和加速度感知单元的反馈量进行计算,进而转化为系统调整单元的调节量,再使用脉冲宽度调制器对无人机各方向的辅助螺旋桨的转速进行精确调整,从而使机身水平面各方向的速度及加速度为零,确保无人机在垂直方向上完成升降动作。
无人机装置还设有用于远程监测和控制无人机运行的地面控制装置,地面控制装置包括显示屏、存储器以及操作界面。通过地面控制装置的操作界面向主控单元发送控制执行信号,同时接收由主控单元回传回来的各个系统单元的工作状态信息,并通过显示屏显示查看,这些回传回来的信息存储于存储器中。
主螺旋桨为无人机提供竖直方向的作用力,用以克服无人机自身的重力,实现无人机的升降,辅助螺旋桨为无人机提供水平方向上的作用力,用以克服无人机受到的水平的外界作用力,使无人机在水平面各方向的速度及加速度为零,提高无人机的抗干扰能力。无人机在环境恶劣、风速大的情况下实现平稳升降,同时通过速度和加速度感知器件测得反馈量,根据智能算法得到的调节量进行调节,通过主控单元对辅助螺旋桨的转速进行调整,并且随环境变化而进行调整,使其在水平方向上的速度和加速度为零,保证无人机在升降时安全运行,免受外界干扰。
实施例2
本实施例用于无人机在平稳环境状况下起飞和降落的场合。
如图3所示,升降时抗干扰的无人机装置,包括多个辅助螺旋桨,所述辅助螺旋桨以十字形机架为中心,对称布置于无人机机体周围,辅助螺旋桨的旋转平面垂直于水平面,且辅助螺旋桨的旋转平面方向可调。在本实施例中,将辅助螺旋桨的旋转平面的方向调整为平行于水平面,与主螺旋桨的旋转平面方向相同,主螺旋桨包括第一主螺旋桨1、第二主螺旋桨2、第三主螺旋桨3、第四主螺旋桨4,且四个主螺旋桨布置于十字形机架结构上,将十字形机架的布置平面看作直角坐标平面,则第一主螺旋桨1和第三主螺旋桨3分别布置在X轴的正负方向上,且主螺旋桨的旋转平面平行于水平面,为无人机提供向上的拉力,用以克服无人机自身的重力。第二主螺旋桨2和第四主螺旋桨4分别布置在Y轴的正负方向上,且主螺旋桨的旋转平面平行于水平面,为无人机提供向上的拉力,用以克服无人机自身的重力。
辅助螺旋桨安装于十字形机架上,且辅助螺旋桨的旋转平面垂直于所在机架的轴线,如图3所示,辅助螺旋桨为4个,对称布置于十字形机架的4侧端部,第一辅助螺旋桨5和第三辅助螺旋桨7分别布置在X轴的正负方向上,且位于第一主螺旋桨1和第三主螺旋桨3的外侧,辅助螺旋桨旋转形成的旋转平面平行于水平面,同时平行于X轴的轴线,用以提供竖直方向上的作业用力,第二辅助螺旋桨6和第四辅助螺旋桨8分别布置在Y轴的正负方向上,且位于第二主螺旋桨2和第四主螺旋桨4的外侧,辅助螺旋桨旋转形成的平面平行于水平面,同时平行于Y轴的轴线。无人机在平稳环境中起飞或者降落时,第一辅助螺旋桨5、第二辅助螺旋桨6、第三辅助螺旋桨7和第四辅助螺旋桨8用以提供竖直方向上的作用力,提升无人机升降的速度,缩短无人机的升降时间,使无人机在较短时间内完成升降动作,减少了受到外界环境干扰的几率,从而提高了无人机升降时的抗干扰能力。
在本实施例中,辅助螺旋桨与主螺旋桨安装于同一根十字形机架上,采取这种方式可以简化无人机装置的结构,不需要增加额外的机架用于安装辅助螺旋桨,同时调整辅助螺旋桨旋转形成的平面平行于水平面,且平行于所在十字形机架的轴线,使辅助螺旋桨只提供垂直方向上的作用力,在垂直方向上的作用力达到最大化,使无人机在最短时间内完成升降过程,减少了不确认环境因素的影响,提高升降时抗干扰能力。
在本实施例中,辅助螺旋桨还配置有可调底座,如图3所示,第一辅助螺旋桨5配置有第一可调底座9,第二辅助螺旋桨6配置有第二可调底座10,第三辅助螺旋桨7配置有第三可调底座11,第四辅助螺旋桨8配置有第四可调底座12,用于调整和改变辅助螺旋桨的旋转平面方向,可调底座安装于无人机装置的机架上,在平稳环境起飞降落的过程中,主螺旋桨用于产生向上或向下的拉力,通过调整可调底座的方向,使辅助螺旋桨的旋转平面平行于水平面,从而同时为无人机提供向上的拉力,保证无人机以较快速度在最短时间内完成升降动作。可调底座使用方向可调整装置,方向可调整装置为方向随调节电压进行控制的动力装置,使用舵机作为方向可调整装置,舵机控制电路板接收来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘,舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止,以便实现辅助螺旋桨作用力方向的有效控制。
无人机装置配置有用于测量速度和加速度的感知器件,使用陀螺仪、惯性测量单元等作为对无人机速度和加速度进行感知的传感器器件及单元,同时,无人机装置还配置有脉冲宽度调制器,使用陀螺仪、惯性测量单元对无人机三维空降各方向(前、后、左、右、上、下)的速度和加速度进行测量,作为无人机飞行状态的反馈量,然后在主控单元引入智能算法,根据速度和加速度感知单元的反馈量进行计算,进而转化为系统调整单元的调节量,再使用脉冲宽度调制器对无人机各方向的辅助螺旋桨的转速进行精确调整,无人机在平稳环境下升降时,水平面方向上的速度及加速度为零,可调底座根据信息反馈调整角度,使辅助螺旋桨的旋转平面平行于水平面,使无人机以较快速度在最短时间内完成升降过程,减少了不确认环境因素的影响,提高升降时抗干扰能力。
本实施例在实际应时,首先通过主控单元启动无人机主螺旋桨,主螺旋桨的旋转平面平行于水平面,为无人机提供向上的拉力,无人机上升进入起飞阶段,再通过主控单元启动辅助螺旋桨,为无人机提供水平方向上的作用力,无人机上设置有环境监测系统,通过环境监测系统对外部环境进行监测,使无人机的主控单元根据外部环境及时调整辅助螺旋桨的旋转平面方向,在平稳环境下,主控单元将辅助螺旋桨的旋转平面方向调整为平行于水平面,为无人机提供垂直方向上的作用力,减短无人机的升降时间,无人机完成飞行后,降落时,根据外部环境及时调整辅助螺旋桨的旋转平面方向,在平稳环境下,通过主控单元将辅助螺旋桨的旋转平面方向调整为平行于水平面,为无人机提供垂直方向上的作用力,减短无人机的升降时间,无人机完成降落后,通过主控单元关闭主螺旋桨和辅助螺旋桨。
主螺旋桨为无人机提供向上的拉力,用以克服无人机自身的重力,实现无人机的升降。安装在可调底座上的辅助螺旋桨同样为无人机提供向上的拉力,用以克服无人机自身的重力,提升无人机升降的速度,缩短无人机的升降时间,从而实现无人机在较短时间内完成升降动作,提高升降时抗干扰能力。无人机在平稳环境下升降时,由于水平面方向上的速度和加速度均为零,可调底座通过速度和加速度感知器件测得反馈量,根据智能算法得到的调节量进行调节,辅助螺旋桨的旋转面调整为平行于水平面方向,使无人机以较快速度完成升降,减少了不确认环境因素的影响,免受外界干扰。
实施例3
本实施例用于无人机在环境恶劣、风速大的情况下起飞和降落的场合。
如图4所示,升降时抗干扰的无人机装置,包括多个辅助螺旋桨,所述辅助螺旋桨以十字形机架为中心,对称布置于无人机机体周围,辅助螺旋桨的旋转平面垂直于水平面,且辅助螺旋桨的旋转平面方向可调。无人机的主螺旋桨包括第一主螺旋桨1、第二主螺旋桨2、第三主螺旋桨3、第四主螺旋桨4,且四个主螺旋桨布置于十字形机架结构上,将十字形机架的布置平面看作直角坐标平面,则第一主螺旋桨1和第三主螺旋桨3分别布置在X轴的正负方向上,且主螺旋桨的旋转平面平行于水平面,为无人机提供向上的拉力,用以克服无人机自身的重力。第二主螺旋桨2和第四主螺旋桨4分别布置在Y轴的正负方向上,且主螺旋桨的旋转平面平行于水平面,为无人机提供向上的拉力,用以克服无人机自身的重力。
辅助螺旋桨安装于十字形机架上,且辅助螺旋桨的旋转平面垂直于所在机架的轴线,如图4所示,辅助螺旋桨为4个,对称布置于十字形机架的4个端部,第一辅助螺旋桨5和第三辅助螺旋桨7分别布置在X轴的正负方向上,且位于第一主螺旋桨1和第三主螺旋桨3的外侧,辅助螺旋桨旋转形成的旋转平面垂直于水平面,同时垂直于X轴的轴线,用以提供水平方向上的作用力,第二辅助螺旋桨6和第四辅助螺旋桨8分别布置在Y轴的正负方向上,且位于第二主螺旋桨2和第四主螺旋桨4的外侧,辅助螺旋桨旋转形成的平面垂直于水平面,同时垂直于Y轴的轴线。无人机在环境恶劣、风速大等情况下起飞或者降落时,第一辅助螺旋桨5、第二辅助螺旋桨6、第三辅助螺旋桨7和第四辅助螺旋桨8用于提供水平方向上的作用力,克服无人机在水平方向上的干扰,使无人机在水平方向上受到的速度和加速度为零,从而实现无人机在垂直方向上平稳升降,提高升降时抗干扰能力。
在本实施例中,辅助螺旋桨与主螺旋桨安装于同一根十字形机架上,采取这种方式可以简化无人机装置的结构,不需要增加额外的机架用于安装辅助螺旋桨,同时调整辅助螺旋桨旋转形成的平面垂直于水平面,且垂直于所在十字形机架的轴线,使辅助螺旋桨只提供水平方向上的作用力,在水平方向上的作用力达到最大化,使无人机能够实现平稳升降,提高升降时的抗干扰能力。
在本实施例中,辅助螺旋桨还配置有可调底座,如图4所示,第一辅助螺旋桨5配置有第一可调底座9,第二辅助螺旋桨6配置有第二可调底座10,第三辅助螺旋桨7配置有第三可调底座11,第四辅助螺旋桨8配置有第四可调底座12,用于调整和改变辅助螺旋桨的旋转平面方向,所述可调底座安装于无人机装置的机架上,在环境恶劣、风速大等状况下起飞和降落时,主螺旋桨用于产生向上或向下的拉力,通过调整可调底座的方向,使辅助螺旋桨的旋转平面垂直于水平面,从而同时为无人机提供水平方向上的作用力,保证无人机平稳升降。可调底座指方向随调节电压进行控制的方向可调整装置,使用舵机作为方向可调整装置,舵机控制电路板接收来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘,舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止,以便实现辅助螺旋桨作用力方向的有效控制。
无人机装置配置有用于测量速度和加速度的感知器件,使用陀螺仪、惯性测量单元等作为对无人机速度和加速度进行感知的传感器器件及单元,同时,无人机装置还配置有脉冲宽度调制器,使用陀螺仪、惯性测量单元对无人机三维空降各方向(前、后、左、右、上、下)的速度和加速度进行测量,作为无人机飞行状态的反馈量,然后在主控单元引入智能算法,根据速度和加速度感知单元的反馈量进行计算,进而转化为系统调整单元的调节量,再使用脉冲宽度调制器对无人机各方向的辅助螺旋桨的转速进行精确调整,无人机在环境恶劣、风速大等状况下升降时,无人机在水平面方向上存在速度及加速度,可调底座根据信息反馈调整角度,使辅助螺旋桨的旋转平面垂直于水平面,使无人机克服在水平方向受到的外力,使其在水平方向上的速度和加速度为零,实现无人机的平稳升降。
主螺旋桨为无人机提供向上的拉力,用以克服无人机自身的重力,实现无人机的升降。安装在可调底座上的辅助螺旋桨为无人机提供水平方向上的作用力,用以克服无人机在水平方向上受到的干扰,使无人机平稳地完成起飞和降落,提高升降时抗干扰能力。无人机在环境恶劣、风速大的情况下升降时,由于无人机在水平面方向上存在速度和加速度,可调底座通过速度和加速度感知器件测得反馈量,根据智能算法得到的调节量进行调节,辅助螺旋桨的旋转面调整为垂直于水平面方向,使无人机在恶劣环境下实现平稳升降,免受外界干扰。
实施例4
本实施例用于无人机在一般环境(存在风速,但风速不大)下升降的场合。
在本实施例中,辅助螺旋桨还配置有可调底座,第一辅助螺旋桨5配置有第一可调底座9,第二辅助螺旋桨6配置有第二可调底座10,第三辅助螺旋桨7配置有第三可调底座11,第四辅助螺旋桨8配置有第四可调底座12,用于调整和改变辅助螺旋桨的旋转平面方向,所述可调底座安装于无人机装置的机架上,在存在外界干扰而且干扰不大的情况下起飞和降落时,主螺旋桨用于产生向上或向下的拉力,通过调整可调底座的方向,使辅助螺旋桨的旋转平面与水平面存在一定角度,从而同时为无人机提供竖直方向、水平方向上的作用力,保证无人机在水平方向上的速度和加速度为零,同时还能为无人机在竖直方向上提供一定量的作用力,使无人机在平稳升降的同时,加快升降的速度,免受外界干扰。可调底座指方向随调节电压进行控制的方向可调整装置,使用舵机作为方向可调整装置,舵机控制电路板接收来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘,舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止,以便实现辅助螺旋桨作用力方向的有效控制。
无人机装置配置有用于测量速度和加速度的感知器件,使用陀螺仪、惯性测量单元等作为对无人机速度和加速度进行感知的传感器器件及单元,同时,无人机装置还配置有脉冲宽度调制器,使用陀螺仪、惯性测量单元对无人机三维空降各方向(前、后、左、右、上、下)的速度和加速度进行测量,作为无人机飞行状态的反馈量,然后在主控单元引入智能算法,根据速度和加速度感知单元的反馈量进行计算,进而转化为系统调整单元的调节量,再使用脉冲宽度调制器对无人机各方向的辅助螺旋桨的转速进行精确调整,无人机在存在一定外界干扰的情况下升降时,无人机在水平面方向上存在一定速度及加速度,可调底座根据信息反馈调整角度,使辅助螺旋桨的旋转平面与水平面调整为一定角度,使无人机不仅平稳升降,同时还以较快速度在最短时间内完成升降过程,减少了不确认环境因素的影响,提高升降时抗干扰能力。
主螺旋桨为无人机提供向上的拉力,用以克服无人机自身的重力,实现无人机的升降。安装在可调底座上的辅助螺旋桨同时为无人机提供水平方向、垂直方向上的作用力,用以克服无人机在水平方向上受到干扰的同时,使无人机在较短时间内完成起飞和降落,提高升降时抗干扰能力。
在实际应用平稳升降的无人机装置时,根据以下方法来操作和控制无人机,该方法包括以下步骤:
a、通过主控单元启动无人机主螺旋桨;
b、主螺旋桨的旋转平面平行于水平面,为无人机提供向上的拉力,无人机上升进入起飞阶段,再通过主控单元启动辅助螺旋桨,为无人机提供水平方向上的作用力;
c、无人机上自带有环境监测系统,通过环境监测系统对外部环境进行监测,主控单元根据外部环境情况及时调整辅助螺旋桨的旋转平面方向,在平稳环境下,主控单元将辅助螺旋桨的旋转平面方向调整为平行于水平面,为无人机提供垂直方向上的作用力,减短无人机的升降时间,在恶劣环境下,主控单元将辅助螺旋桨的旋转平面方向调整为垂直于水平面,为无人机提供水平方向上的作用力,使无人机机身在水平面各方向的速度及加速度为零,确保无人机平稳上升;
d、无人机完成飞行后,在下降时,无人机自带的环境监测系统对外部环境进行监测,主控单元根据外部环境及时调整辅助螺旋桨的旋转平面方向,在平稳环境下,主控单元将辅助螺旋桨的旋转平面方向调整为平行于水平面,为无人机提供垂直方向上的作用力,减短无人机的升降时间,在恶劣环境下,主控单元将辅助螺旋桨的旋转平面方向调整为垂直于水平面,为无人机提供水平方向上的作用力,使无人机机身在水平面各方向的速度及加速度为零,确保无人机平稳降落;
e、无人机降落后,通过主控单元关闭主螺旋桨和辅助螺旋桨。
采取上述方式,使无人机在平稳环境下升降时,减短升降时间,使无人机免受外界环境的影响,在恶劣环境下升降时,能增强无人机的抗干扰能力,完成平稳升降。
一种平稳升降的无人机装置及控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


动态评分
0.0