






专利摘要
本发明提供一种桥式吊车系统的全局滑模控制方法,包括:确定动力学模型;控制目标的确定;阻尼信号的设计及动力学方程的变换;设计控制律;控制方法的实现;本发明所提控制方法在实现桥式吊车系统的台车定位控制和消摆控制的同时保证了桥式吊车系统在运行全过程都具有良好鲁棒性,提高了桥式吊车的控制效率,降低了桥式吊车系统在实际运行时因外界干扰和不确定参数引发的安全问题的概率,具有良好的应用前景和经济效益。
权利要求
1.桥式吊车系统的全局滑模控制方法,其特征在于:包括以下步骤:
步骤1,确定动力学模型;
基于欧拉-拉格朗日方程,桥式吊车系统的动力学方程如下:
其中,M和m分别是台车和负载的质量,固定吊绳长度为l,g表示重力加速度;x表示台车偏离初始位置的水平位移, 表示台车的速度, 表示台车的加速度;θ表示负载摆角, 表示负载摆角的角速度, 表示负载摆角的角加速度;Fx表示作用于台车的合力:
Fx=F-Fr (3)
其中,F表示电机作用于台车的驱动力,Fr表示台车与桥架之间的摩擦力,选用如公式(4)描述摩擦力:
其中,Frox、krx∈R+代表台车与导轨之间的摩擦参数,μx∈R+表示台车与导轨间的静摩擦系数;
步骤2,控制目标的确定;
其中,pdx表示台车的目标位置,T表示矩阵或向量的转置;
步骤3,阻尼信号的设计及动力学方程的变换:
定义如下阻尼信号:
表示阻尼信号;
对阻尼信号 关于时间积分两次,可得:
表示阻尼信号的一次时间积分;xs表示阻尼信号的二次时间积分;
基于上述引入的信号(15),定义“虚拟”台车位置信号χ及相应的误差信号ξ及其导数:
χ=x-λxs (16)
ξ=χ-pdx (17)
其中,λ∈R+表示正常数, 分别表示误差信号ξ的一阶导数和二阶导数, 表示“虚拟”台车位置信号χ的一阶导数和二阶导数;
根据桥式吊车系统的动力学方程和公式(18)得到(19)和(20):
其中,m(θ)为辅助函数一, 为辅助函数二,g代表重力加速度,其具体表达式如下:
m(θ)=M+msin2θ (7)
步骤4,设计控制律:
基于变换后的动力学方程(19)-(20)及控制目标,滑模面为:
s为滑模面,τ表示积分变量, 表示 初始时刻的位置;
辅助变量 的表达式为:
其中, κδ∈R+是满足 为Hurwitz多项式的正常数,z表示复变量;
基于桥式吊车系统模型(19)-(20)和滑模面(21),设计如下控制方法:
其中,k1、k2∈R+是正的控制增益,sgn(·)是符号函数,·表示任意函数:
步骤5,控制方法的实现
根据控制信号(23)控制台车的运动,从而控制负载摆角,实现对桥式吊车系统的控制目标。
2.根据权利要求1所述的桥式吊车系统的全局滑模控制方法,其特征在于:
绳与负载一直位于桥架下方:
3.根据权利要求2所述的桥式吊车系统的全局滑模控制方法,其特征在于:
得到公式(18)和公式(19)的方法为:
对公式(2)两边除以ml,得到
将 代入公式(1),得到
将(18)代入这 和 从而得到(19)和(20)。
4.根据权利要求3所述的桥式吊车系统的全局滑模控制方法,其特征在于:
说明书
技术领域
本发明属于欠驱动系统的控制技术,主要是一种桥式吊车系统的全局滑模控制方法。
背景技术
桥式吊车系统作为一种重要的运输工具,在各种工业场合应用广泛,其控制的主要目的是利用台车将负载尽可能快而准确地送到目标位置,即台车的定位控制,并在运输过程中有效控制负载摆角,使台车到达目标位置时负载摆角为零,即消摆控制。但由于桥式吊车系统的欠驱动特性,控制输入直接作用在台车上以控制台车的位移,而负载摆角由台车的运动间接控制,加大了控制难度。
目前,已有不少学者对桥式吊车系统进行了不同方面的研究。在文献[1]中将对台车位移的控制问题转换为跟踪控制问题,设计了一个新型的轨迹跟踪控制方法,使得台车的运行和控制量更为平滑。文献[2]考虑了在实际情况下台车质量、负载质量及吊绳长度难以准确测量的问题,提出了一个基于耗散定理的自适应控制方法,可在线估计台车质量、负载质量及吊绳长度。文献[3]和文献[4]分别考虑了桥式吊车系统最短时间轨迹规划问题和桥式吊车系统运输过程能量最优问题,并且前者还对负载摆角、台车的速度及加速度等进行了约束。除此之外,基于LQR的定位与防摆控制[5]、有限时间的定位控制[6]、离线轨迹规划方法[7]等都有学者进行过研究。
在桥式吊车系统实际运行过程中,极易受到外界干扰和不确定参数的影响,降低桥式吊车的控制效率。因滑模控制对不确定参数和外界干扰有良好的鲁棒性,关于桥式吊车系统的滑模控制有多位学者进行了研究,例如,文献[8]分别运用了传统的滑模技术和递阶滑模控制技术设计了桥式吊车系统的鲁棒控制器;针对变绳长的桥式吊车系统,有学者提出了基于动态滑模的防摆定位控制器[9]、自适应滑模控制[10]。一般而言,滑模控制的系统状态分为趋近模态和滑动模态,当系统状态处于滑动模态时,系统对不确定参数和外界干扰都具有良好的鲁棒性[11],但该特性不存在于趋近模态,即不具有全程鲁棒性。
因此,需要对现有技术进行改进。
参考文献如下:
1.孙宁,方勇纯,陈鹤.欠驱动桥式吊车消摆跟踪控制[J].控制理论与应用,2015,32(8):326-333.
2.马博军,方勇纯,王宇韬,姜钟平.欠驱动桥式吊车系统自适应控制[J].控制理论与应用,2008,25(6):1105-1109.
3.Zhang X B,Fang Y C,Sun N.Minimum-time trajectory planning forunderactuated overhead crane systems with state and control constraints[J].IEEE Transactions on Industrial Electronics,2014,61(12):6915-6925.
4.Sun N,Wu Y M,Chen H,Fang Y C.An energy-optimal solution fortransportation control of cranes with double pendulum dynamics:design andexperiments[J].Mechanical Systems and Signal Processing,2018,102:87-101.
5.刘保朝,贾红雨,陈能祥.基于LQR算法的三维桥式吊车定位及防摆控制研究[J].计算机测量与控制,2018,26(6):89-93.
6.Wu X F,He L,Gao H,Qian J Y,Wu X Q.Finite-time tracking control ofunderactuated overhead cranes[C].Proceeding of the 30th Chinese Control andDecision Conference,2018.Shenyang,China:3146-3151.
7.Sun N,Fang Y C,Zhang Y D,and Ma B J.A novel kinematic coupling-based trajectory planning method for overhead cranes[J].IEEE/ASMETransactions on Mechatronics,2012,17(1):166-173.
8.Tuan L A,Lee S-G.Sliding mode controls of double-pendulum cranesystems[J].Journal of Mechanical Science and Technology,2013,27(6):1863-1873
9.谭莹莹,徐为民,徐攀,李众峰.基于动态滑模结构的桥式吊车防摆定位控制器设计[J].控制工程,2013,20:117-121.
10.Tuan L A,Moon S-C,Lee W G,Lee S-G.Adaptive sliding mode control ofoverhead cranes with varying cable length[J].Journal of Mechanical Scienceand Technology,2013,27(3):885-893.
11.刘金琨.滑模变结构控制[M].清华大学出版社,2005:66-71.
发明内容
本发明要解决的技术问题是提供一种高效的桥式吊车系统的全局滑模控制方法。
为解决上述技术问题,本发明提供一种桥式吊车系统的全局滑模控制方法:包括以下步骤:
步骤1,确定动力学模型;
基于欧拉-拉格朗日方程,桥式吊车系统的动力学方程如下:
其中,M和m分别是台车和负载的质量,固定吊绳长度为l,g表示重力加速度;x表示台车偏离初始位置的水平位移, 表示台车的速度, 表示台车的加速度;θ表示负载摆角, 表示负载摆角的角速度, 表示负载摆角的角加速度;Fx表示作用于台车的合力:
Fx=F-Fr (3)
其中,F表示电机作用于台车的驱动力,Fr表示台车与桥架之间的摩擦力,选用如公式4描述摩擦力:
其中,Frox、krx∈R+代表台车与导轨之间的摩擦参数,μx∈R+表示台车与导轨间的静摩擦系数。
步骤2,控制目标的确定;
其中,pdx表示台车的目标位置,T表示矩阵或向量的转置;
步骤3,阻尼信号的设计及动力学方程的变换:
定义如下阻尼信号:
表示阻尼信号;
对阻尼信号 关于时间积分两次,可得:
表示阻尼信号的一次时间积分;xs表示阻尼信号的二次时间积分;
基于上述引入的信号(15),定义“虚拟”台车位置信号χ及相应的误差信号ξ及其导数:
χ=x-λxs (16)
ξ=χ-pdx (17)
其中,λ∈R+表示正常数, 分别表示误差信号ξ的一阶导数和二阶导数, 表示“虚拟”台车位置信号χ的一阶导数和二阶导数;
根据桥式吊车系统的动力学方程和公式(18)得到(19)和(20):
其中,m(θ)为辅助函数一, 为辅助函数二,g代表重力加速度,其具体表达式如下:
m(θ)=M+msin2θ (7)
步骤4,设计控制律:
基于变换后的动力学方程(19)-(20)及控制目标,滑模面为:
s为滑模面,τ表示积分变量, 表示 初始时刻的位置;
辅助变量 的表达式为:
其中, κδ∈R+是满足 为Hurwitz多项式的正常数,z表示复变量。
基于桥式吊车系统模型(19)-(20)和滑模面(21),设计如下控制方法:
其中,k1、k2∈R+是正的控制增益,sgn(·)是符号函数,·表示任意函数:
步骤5,控制方法的实现
根据控制信号(23)控制台车的运动,从而控制负载摆角,实现对桥式吊车系统的控制目标。
作为对本发明桥式吊车系统的全局滑模控制方法的改进:
绳与负载一直位于桥架下方:
作为对本发明桥式吊车系统的全局滑模控制方法的进一步改进:
得到公式(18)和公式(19)的方法为:
对公式(2)两边除以ml,得到
将 代入公式(1),得到
将(18)代入这 和 从而得到(19)和(20);
作为对本发明桥式吊车系统的全局滑模控制方法的进一步改进:
对于本发明的稳定性分析:
用于证明在本发明提出的控制方法(23)作用下,系统状态始终保持在s=0上,且台车运动到目标位置时,负载摆角为零,实现系统的控制目标。
根据定义的滑模面(21)可知:
其中,s(0)表示滑模面s在初始时刻的值,上式证明在初始时刻系统状态处于s=0上。
为证明系统状态在任意时刻都始终保持在s=0上,定义如下Lyapunov函数:
根据式(24)和(25)知,V(0)=0,其中,V(0)表示V的初始时刻的值。对上式(25)关于时间求导,并将本发明所提控制方法(23)和式(18)、式(20)代入,可得:
因为m(θ)>0,因此有 所以系统在Lyapunov意义下是稳定的。由式(26)知,V≥0是一个非增函数,且V(0)=0,所以
其中,t表示时间,基于式(27)及式(25),可得:
由式(28)和式(24)可知,系统状态始终保持在s=0上,即本发明所提控制方法为全局滑模控制方法。
将式(18)代入式(28):
因为 κδ是满足 为Hurwitz多项式的正常数,所以ξ关于平衡点全局渐近稳定,即:
基于式(18)、式(30)和式(19),可得:
对于本发明针对的桥式吊车系统,考虑到实际情况,可做如下假设:
cosθ≈1,sinθ≈θ (32)
根据式(32),可将式(31)和式(2)近似为如下形式:
对于式(33),已知λ>0,l>0,g>0,根据劳斯判据可知:
由式(30)知,结合式(15)、式(16)、式(17),可得:
又根据式(35)和式(36),可得:
结合式(32)、式(32)、式(35)、式(37),考虑零初始条件,有如下的结论:
结合式(16)、式(17)、式(30)、式(38),得:
因此,由式(39)和式(35)可知,桥式吊车系统在所提控制方法下实现了系统控制目标。
综上所述,本发明所提出的控制方法不仅能使系统状态始终保持在s=0上,即为全局滑模控制方法,而且能实现台车定位控制和消摆控制。
本发明桥式吊车系统的全局滑模控制方法的技术优势为:
针对桥式吊车系统,本发明提出了一种全局滑模控制方法。相比较一般的滑模控制方法,本发明所提控制方法在实现桥式吊车系统的台车定位控制和消摆控制的同时保证了桥式吊车系统在运行全过程都具有良好鲁棒性,提高了桥式吊车的控制效率,降低了桥式吊车系统在实际运行时因外界干扰和不确定参数引发的安全问题的概率,具有良好的应用前景和经济效益。
附图说明
下面结合附图对本发明的具体实施方式作进一步详细说明。
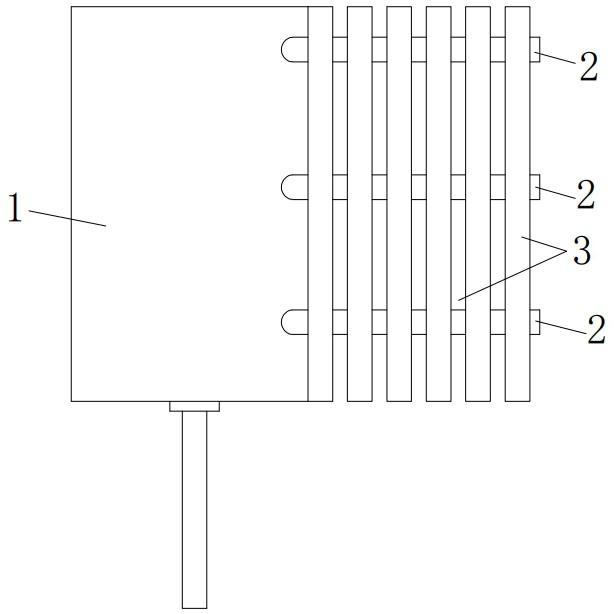
图1为本发明针对的桥式吊车系统模型;
图2为本发明所提控制方法在零初始条件下的仿真结果图;
图3为本发明所提控制方法在不确定参数下的仿真结果图;
图4为本发明所提控制方法在外界干扰下的仿真结果图。
具体实施方式
下面结合具体实施例对本发明进行进一步描述,但本发明的保护范围并不仅限于此。
实施例1、桥式吊车系统的全局滑模控制方法,包括以下步骤:
步骤1,确定动力学模型;
本发明考虑的是桥式吊车系统,包括一个可沿桥架做一维平移运动的台车以及通过固定绳长连接在台车上的负载。基于欧拉-拉格朗日方程,桥式吊车系统的动力学方程如下:
其中,M和m分别是台车和负载的质量,固定吊绳长度为l,g表示重力加速度;x表示台车偏离初始位置的水平位移, 表示台车的速度, 表示台车的加速度;θ表示负载摆角, 表示负载摆角的角速度, 表示负载摆角的角加速度;Fx表示作用于台车的合力:
Fx=F-Fr (3)
其中,F表示电机作用于台车的驱动力,Fr表示台车与桥架之间的摩擦力,基于文献[7](Sun N,Fang Y C,Zhang Y D,and Ma B J.A novel kinematic coupling-basedtrajectory planning method for overhead cranes[J].IEEE/ASME Transactions onMechatronics,2012,17(1):166-173.),选用如下模型公式(4)描述摩擦力:
其中,Frox、krx∈R+代表台车与导轨之间的摩擦参数,μx∈R+表示台车与导轨间的静摩擦系数。
为了便于之后的说明及控制方法设计,现对式(2)两边除以ml,得到如下方程:
将式(5)代入式(1),得到:
其中,辅助函数一m(θ)和辅助函数二 如下所示:
m(θ)=M+msinθ (7)
步骤2,控制目标的确定;
本发明针对的是桥式吊车系统,其主要的控制目标是:由电机直接控制台车的运动,通过台车将负载运送到目标位置,并通过台车的运动间接控制负载摆动,使台车到达目标位置时,负载摆动消除至零,即:
其中,pdx表示台车的目标位置,T表示矩阵或向量的转置。
此外,考虑桥式吊车系统运动的实际情况,本发明假设吊绳与负载一直位于桥架下方,即:
步骤3,阻尼信号的设计及动力学方程的变换
为实现步骤2中提出的消除负载摆动的控制目标,考虑如下函数:
Vθ为负载摆动。
对式(11)关于时间求一阶导数,并结合式(5),可得:
为时间一阶求导后的负载摆动。
基于上式,设计满足下述关系的阻尼信号 可有效抑制负载摆动:
为消除负载的摆动,定义如下阻尼信号:
表示阻尼信号;
对上式所定义的阻尼信号 关于时间积分两次,可得:
表示阻尼信号的一次时间积分;xs表示阻尼信号的二次时间积分;
基于上述引入的信号(15),定义如下“虚拟”台车位置信号χ及相应的误差信号ξ及其导数:
χ=x-λxs (16)
ξ=χ-pdx (17)
其中,λ∈R+表示正常数, 分别表示误差信号ξ的一阶导数和二阶导数, 表示“虚拟”台车位置信号χ的一阶导数和二阶导数。将桥式吊车系统的动力学方程进行一系列的变换得到(19)和(20);
动力学方程的变换过程为:对公式(2)两边除以ml,得到 将这个式子代入(1),得到 将(18)代入这两个式子 得到(19)和(20);
可得变换后的动力学方程如下所示:
其中,m(θ)为辅助函数一, 为辅助函数二,g代表重力加速度。
步骤4,设计控制律
基于变换后的动力学方程(19)-(20)及控制目标,设计如下滑模面:
s为滑模面,τ表示积分变量, 表示 初始时刻的位置;
辅助变量 的表达式如下:
其中, κδ∈R+是满足 为Hurwitz多项式的正常数,z表示复变量。
基于桥式吊车系统模型(19)-(20)和滑模面(21),设计如下控制方法:
其中,k1、k2∈R+是正的控制增益,sgn(·)是符号函数,·表示任意函数:
步骤5,控制方法的实现
运用在桥式吊车系统安装的传感器,实时对台车的位移x和速度 负载的摆角θ和摆角的速度 进行测量,根据控制信号(23)控制台车的运动,间接控制负载摆角,实现对桥式吊车系统的控制目标。
仿真结果描述:
为了检验本发明提出的控制方法的控制性能,本部分进行了两部分仿真实验,第一部分(仿真1)为零初始条件的台车定位控制,第二部分(仿真2)为不确定参数和外界干扰的鲁棒性测试。
仿真1,零初始条件的台车定位控制
本次仿真的参数选择为:M=7kg,m=1.025kg,l=0.6m,g=9.8m/s2,台车的目标位置为:pdx=0.6m,摩擦系数为:Frox=4.4,μx=0.01,krx=-0.5,控制方法(23)的参数选择为: κδ=2.4,k1=1.1,k2=0.2。
该仿真结果如图2所示。由图2可知,在台车运输过程中,负载摆角的幅值约为0.05rad,而台车在7秒到达目标位置后,负载摆角几乎无残余摆动,证明了本发明所提的控制方法具有优越的台车定位控制性能和消摆性能。
仿真2,鲁棒性测试
接下来进一步检测本发明提出的控制方法对不确定系统参数和外界干扰的鲁棒性。
仿真2.1对不确定参数的鲁棒性测试
改变负载的质量为m=2.025kg和吊绳长度为l=0.1m,其他参数与仿真1保持不变。仿真结果如图3所示,对比图2和图3可知,改变负载质量和吊绳长度对本发明所提的控制方法的控制性能影响不大。
仿真2.2对外界干扰的鲁棒性测试
系统参数选择与仿真1相同,在4秒与6秒之间对负载增加一个幅值为1的随机干扰,仿真结果如图4所示。由图4可知,在本发明所提控制方法作用下,负载受到的外界干扰很快地就被抑制和消除,台车最终达到目标位置,负载摆角也消除至零。
由仿真2.1和仿真2.2的结果可知,本发明所提的控制方法对不确定参数和外界干扰具有鲁棒性。
最后,还需要注意的是,以上列举的仅是本发明的若干个具体实施例。显然,本发明不限于以上实施例,还可以有许多变形。本领域的普通技术人员能从本发明公开的内容直接导出或联想到的所有变形,均应认为是本发明的保护范围。
桥式吊车系统的全局滑模控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0