







专利摘要
本发明公开了一种基于机器视觉的胎面检测方法。设计一种基于机器视觉的胎面检测方法,利用机器视觉软件halcon技术和图像处理算法保证系统的可靠性、测量的准确性以及提高生产效率和产品质量,实现胎面检测的智能化,是社会生产的迫切需求。本发明通过提取工业相机拍摄的胎面图像,进行平滑滤波、阈值分割后,利用灰度分布特性提取需要处理的区域;然后对预处理后的图像进行特征选择识别出胎面的长度;用边缘检测算子提取胎面下端线段,求其与水平线段之间的夹角即倾斜角;其中,通过标定获取图像坐标与长度间的映射关系计算出胎面的实际长度。本发明检测速度快,精度较高。
说明书
技术领域
本发明属于机器视觉技术领域,具体涉及一种基于机器视觉的胎面检测方法。
背景技术
橡胶轮胎是我国化学工业的重要产品之一,轮胎裁断是轮胎厂半成品生产中的重要环节,其裁断精度直接影响轮胎成型半成品的质量,进而影响轮胎成品的内在质量。现有的轮胎定长裁断系统大多在系统传动辊轮中安装编码器,在系统运动时通过捕获一定数量的脉冲信号来确定长度并发出裁剪信号。由于传送系统运行时与胎面可能出现打滑等不确定因素,上述方式裁断出来的胎面仍然需进行二次测量来保证产品质量,且二次测量的传统方法是通过工人在生产线旁用卷尺抽样测量,这种检测手段不够全面、测量误差较大、效率较低。但是,随着社会生产对定长裁断胎面长度装置的检测效率及其定长剪切长度的精确度等方面提出了更高的要求,这需要具有测量及技术优势的方法来满足。
计算机视觉研究中的机器视觉测量技术在尺寸测量方面与其他测量方式相比具有技术优势,其非接触式测量方式实现了测量工作的高效性,应用在定长裁断胎面长度装置可更有效、精确实现定长裁断胎面长度。因此,设计一种基于机器视觉的胎面检测方法,利用机器视觉软件halcon技术和图像处理算法保证系统的可靠性、测量的准确性以及提高生产效率和产品质量,实现胎面检测的智能化,是社会生产的迫切需求。
发明内容
本发明的目的在于克服现有技术的不足,提供了一种检测速度快、精度高、智能化检测的基于机器视觉的胎面检测方法。
本发明的具体步骤如下:
步骤1:采用工业相机采集胎面图像。
步骤2:对胎面图像进行平滑滤波处理。
步骤3:对平滑滤波处理后的图像根据预设阈值进行阈值分割。
步骤4:对经步骤3处理后的图像计算灰度直方图的平均值和方差,并根据灰度直方图特性提取出作为预处理后的图像,具体为:
4-1:计算经步骤3处理后图像的灰度平均值和方差;
4-2:对经步骤2处理的图像进行全局阈值分割,最小像素值为0,最大像素值为步骤4-1中计算出的灰度平均值与方差相加之和;
4-3:对经步骤4-2处理的图像进行连通域联合,并作为预处理后的图像。
步骤5:提取经步骤4-3处理的图像中满足多个特征参数的区域,获取步骤1图像中胎面的长度,具体为:
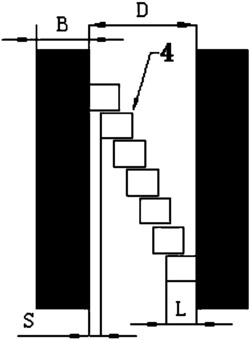
5-1:设定经步骤4-3处理的图像左上角为坐标原点,提取满足右下角横坐标为r的区域a,r的数值根据步骤1中胎面图像的宽度W进行选择:0.05W≤r≤0.95W;
5-2:提取步骤5-1中区域a里满足纵坐标为y的区域b,其中,y的数值根据步骤1中胎面图像的高度H进行选择:0.05H≤y≤0.9H;
5-3:提取步骤5-2中区域b里满足像素点数目为s1的区域c,s1的数值根据步骤1中胎面图像的总像素点数目A进行选择:0.15A≤s1≤A;
5-4:提取步骤5-3中区域c里满足方向性为g1的区域d,g1的数值范围为-2~2;
5-5:创建包围步骤5-4中区域d的矩形,获取矩形最左端与矩形最右端的横坐标差值x,差值x即为步骤1图像中胎面的长度;
5-6:由设定的实际尺寸与图像像素比值k,将步骤5-5中的横坐标差值x乘以k作为胎面的实际长度。
步骤6:为提取出胎面下端线段,需对经步骤3处理的图像进行连通域联合、图像求补、形态学开运算及二值化预处理;通过边缘检测算子提取图像的边缘幅值和方向;利用霍夫变换处理图像边缘;
步骤7:对经步骤6处理的图像进行特征选择,提取出胎面下端线段,求胎面下端线段与水平线之间的夹角即倾斜角,具体为:
步骤7-1:计算经步骤6-6处理的图像中所包含的各线段所占像素的面积zi,i=1,2,3,...,n,n取值为经步骤6-6处理的图像中所包含的线段数量;
步骤7-2:记zi中的最大值为zmax,将经步骤6-6处理的图像中所占像素面积满足0.1zmax≤zi≤zmax这一范围的线段列于线段数组m中;
步骤7-3:提取线段数组m中满足方向性g2这一特征参数的线段AB,g2的数值范围为-0.5~0.5;
步骤7-4:画出步骤7-3中的线段AB,线段AB即为提取出的胎面下端线段,获取线段AB的端点A、B坐标;
步骤7-5:记点C的横坐标为线段AB的终点B的横坐标,点C的纵坐标为线段AB的起点A的纵坐标,画出以点A为起点、点C为终点的水平线段;
步骤7-6:计算步骤7-4中的线段AB与步骤7-5中的水平线段AC之间的夹角,胎面下端线段AB与水平线AC之间的夹角即倾斜角。
所述步骤2中的平滑滤波处理选择Deriche递归平滑滤波器。
所述步骤3中的预设阈值由自动阈值分割算子根据平滑滤波处理后的图像自动设置。
所述的步骤6,具体为:
6-1:对经步骤3处理的图像进行连通域联合;
6-2:对经步骤6-1处理的图像进行图像求补,提取出整个胎面;
6-3:对经步骤6-2处理的图像进行形态学开运算,并进行连通域联合;
6-4:对经步骤6-3处理的图像进行二值化;
6-5:选取3*3模板,滤波器类型选择绝对值之和,用sobel边缘检测算子检测经步骤6-4处理后图像的边缘幅值和方向;
6-6:利用霍夫变换处理步骤6-5中的图像边缘。
本发明具有的有益效果:
本发明通过提取工业相机拍摄的胎面图像,进行平滑滤波、阈值分割后,利用灰度分布特性提取需要处理的区域;然后对预处理后的图像进行特征选择识别出胎面的长度;用边缘检测算子提取胎面下端线段,求其与水平线段之间的夹角即倾斜角;其中,通过标定获取图像坐标与长度间的映射关系计算出胎面的实际长度。本发明检测速度快,精度较高。
附图说明
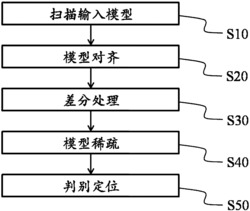
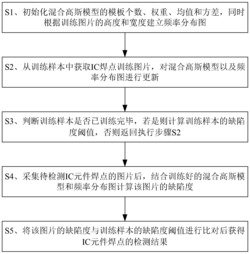
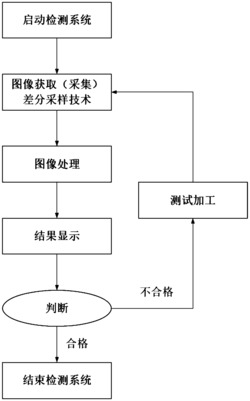
图1是本发明中检测图像中胎面长度的流程图;
图2是本发明中检测图像中胎面下端线段倾斜角的流程图。
具体实施方式
下面结合附图对本发明进行详细说明。
如图1和2所示,一种基于机器视觉的胎面检测方法,具体步骤如下:
步骤1:采用工业相机采集胎面图像。
步骤2:对胎面图像进行平滑滤波处理,这里,考虑到高斯滤波器及其倒数不能以递归的方式来实现,故平滑滤波处理选择Deriche递归平滑滤波器。
步骤3:对平滑滤波处理后的图像根据预设阈值进行阈值分割,预设阈值由自动阈值分割算子根据平滑滤波处理后的图像自动设置。
步骤4:对经步骤3处理后的图像计算灰度直方图的平均值和方差,并根据灰度直方图特性提取出作为预处理后的图像,具体为:
4-1:计算经步骤3处理后图像的灰度平均值和方差;
4-2:对经步骤2处理的图像进行全局阈值分割,最小像素值为0,最大像素值为步骤4-1中计算出的灰度平均值与方差相加之和;
4-3:对经步骤4-2处理的图像进行连通域联合,并作为预处理后的图像。
步骤5:提取经步骤4-3处理的图像中满足多个特征参数的区域,获取步骤1图像中胎面的长度,具体为:
5-1:设定经步骤4-3处理的图像左上角为坐标原点,提取满足右下角横坐标为r的区域a,r的数值根据步骤1中胎面图像的宽度W进行选择:0.05W≤r≤0.95W;
5-2:提取步骤5-1中区域a里满足纵坐标为y的区域b,其中,y的数值根据步骤1中胎面图像的高度H进行选择:0.05H≤y≤0.9H;
5-3:提取步骤5-2中区域b里满足像素点数目为s1的区域c,s1的数值根据步骤1中胎面图像的总像素点数目A进行选择:0.15A≤s1≤A;
5-4:提取步骤5-3中区域c里满足方向性为g1的区域d,g1的数值范围为-2~2;
5-5:创建包围步骤5-4中区域d的矩形,获取矩形最左端与矩形最右端的横坐标差值x,差值x即为步骤1图像中胎面的长度;
5-6:由设定的实际尺寸与图像像素比值k,将步骤5-5中的横坐标差值x乘以k作为胎面的实际长度。
步骤6:为提取出胎面下端线段,需对经步骤3处理的图像进行连通域联合、图像求补、形态学开运算及二值化预处理;通过边缘检测算子提取图像的边缘幅值和方向;利用霍夫变换处理图像边缘,具体为:
6-1:对经步骤3处理的图像进行连通域联合;
6-2:对经步骤6-1处理的图像进行图像求补,提取出整个胎面;
6-3:对经步骤6-2处理的图像进行形态学开运算,并进行连通域联合;
6-4:对经步骤6-3处理的图像进行二值化;
6-5:选取3*3模板,滤波器类型选择绝对值之和,用sobel边缘检测算子检测经步骤6-4处理后图像的边缘幅值和方向;
6-6:利用霍夫变换处理步骤6-5中的图像边缘。
步骤7:对经步骤6处理的图像进行特征选择,提取出胎面下端线段,求胎面下端线段与水平线之间的夹角即倾斜角,具体为:
步骤7-1:计算经步骤6-6处理的图像中所包含的各线段所占像素的面积zi,i=1,2,3,...,n,n取值为经步骤6-6处理的图像中所包含的线段数量;
步骤7-2:记zi中的最大值为zmax,将经步骤6-6处理的图像中所占像素面积满足0.1zmax≤zi≤zmax这一范围的线段列于线段数组m中;
步骤7-3:提取线段数组m中满足方向性g2这一特征参数的线段AB,g2的数值范围为-0.5~0.5;
步骤7-4:画出步骤7-3中的线段AB,线段AB即为提取出的胎面下端线段,获取线段AB的端点A、B坐标;
步骤7-5:记点C的横坐标为线段AB的终点B的横坐标,点C的纵坐标为线段AB的起点A的纵坐标,画出以点A为起点、点C为终点的水平线段;
步骤7-6:计算步骤7-4中的线段AB与步骤7-5中的水平线段AC之间的夹角,胎面下端线段AB与水平线AC之间的夹角即倾斜角。
一种基于机器视觉的胎面检测方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0