









专利摘要
基于欠采样的信号载频与二维DOA参数估计方法,它属于信号处理技术领域。本发明解决了在奈奎斯特采样理论下,宽带稀疏信号载频和二维DOA参数估计需要的采样率高以及需要配对操作才能实现的问题。本发明利用L型延迟阵列传感器采集信号,通过调制宽带转换器系统获得三轴阵列的欠采样值,再利用三线性分解算法对获得的采样值进行奇异值分解获得信号的二维DOA和频率参数,大大降低了信号的采样率;利用延迟通道估计载频,可以直接计算三位参数估计问题,无需额外的配对操作,减小了算法复杂度,并最终恢复出信号的时域波形。本发明可以应用于信号处理技术领域。
权利要求
1.基于欠采样的信号载频与二维DOA参数估计方法,其特征在于,该方法包括以下步骤:
步骤一、建立由三维空间直角坐标系的x轴正方向和y轴正方向上均匀分布的传感器组成的L型阵列,x轴正方向上每个传感器后均连接有两个MWC通道,在其中一个MWC通道的混频模块前加入延时模块,定义加入延时模块的通道为x轴延时通道,未加入延时模块的通道为x轴非延时通道;y轴正方向上每个传感器后仅连接有一个MWC通道,定义为y轴非延时通道;
传感器接收的信号与周期为T
所述x轴正方向上均匀分布有N个传感器{x
步骤二,分别将x轴正方向和y轴正方向上的N个传感器分为两个子阵,其中:x轴的第一个子阵包括传感器{x
分别获得x轴非延时通道第一个子阵的采样值x
步骤三、分别计算出x
步骤四、利用R
对建立的正则分解模型进行求解,获得中间变量矩阵
所述三阶张量χ
其中:
其中:e代表自然对数,j代表虚数单位,
步骤五、利用步骤四获得的矩阵
所述中间变量
其中:∠(·)代表求复数的相角,
步骤六、利用步骤五获得的
所述步骤六的具体过程为:
第i个窄带目标信号的载频估计值
步骤七、利用步骤六获得的
所述步骤七的具体过程为:
x轴非延迟通道的阵列流型矩阵A
步骤八、利用步骤七的A
所述步骤八的具体过程为:
其中:W(f)是一个M×1的矩阵,
X(f)代表x轴非延时通道采样值的离散时间傅里叶变换,Y(f)代表y轴非延时通道采样值的离散时间傅里叶变换,Z(f)代表x轴延时通道采样值的离散时间傅里叶变换;
步骤九、利用步骤八获得的W(f)恢复出窄带目标信号的频谱S
所述步骤九的具体过程为:
其中:f
其中:
2.根据权利要求1所述的基于欠采样的信号载频与二维DOA参数估计方法,其特征在于,所述步骤一的具体过程为:
其中:x[k]、y[k]和z[k]分别为x轴非延迟通道,y轴非延迟通道和x轴延迟通道的采样值,A
3.根据权利要求2所述的基于欠采样的信号载频与二维DOA参数估计方法,其特征在于,所述步骤二的具体过程为:
其中:x
y
z
说明书
技术领域
本发明属于信号处理技术领域,具体涉及一种基于欠采样的信号载频与二维DOA参数估计方法。
背景技术
阵列信号处理理论的研究开始于六十年代,最开始由Howells于1965年提出了自适应陷波的旁瓣对消器;1979年,Schmidt提出多重信号分类(MUSIC)算法;Roy等人在1986年提出的估计信号参数的旋转不变技术(ESPRIT)算法,促极大的进了阵列信号处理理论的发展,实现了从测向算法向子空间类超分辨方法的跃进;21世纪初,N.D.Sidiropoulos将阵列接收信号模型建模为CP分解模型,将CP分解方法引入阵列信号处理领域,为阵列测向问题提供了新的解决思路。
以上研究虽然解决了阵列信号参数估计的问题,但随着信息技术的发展,以传统的奈奎斯特采样定理采样,对前端ADC的采样速率要求越来越高,如雷达探测、脉冲超宽带通讯等领域中采样速率都在几GSp/s以上。目前的半导体集成电路技术工艺水平,想要设计这样高采样率,而又低成本、低功耗的ADC,是非常困难的。因此,尽量的降低采样速率又能实现基于阵列结构的空频域参数联合估计,具有重要的现实意义。
压缩感知(Compressed Sensing,CS)理论是近年来出现的一种新的信号采样理论,通过线性降维的方式对一个有限高维信号的压缩和采样同时进行,以此减少信号的采样率,减小信号的存储和计算负担。该理论突破了奈奎斯特采样定理的瓶颈,可以进行欠奈奎斯特采样,以高概率高精度重构原始信号。2009年,Mishali和Eldar等人针对多频带信号,提出基于压缩感知理论的调制带宽转换器系统,通过周期混合函数建立起了连续与离散之间的关系,混频前端将信号频谱搬移到基带内进行处理,易于硬件实现。
综上,将调制带宽转换器(Modulated Wideband Converter,MWC)技术与阵列信号处理相结合,在压缩采样下实现信号的二维DOA和载频的联合估计,以解决奈奎斯特采样理论下宽带稀疏信号二维DOA和载频的联合估计的采样率高、信息冗余以及需要配对操作的问题,具有重要的实际应用意义。
发明内容
本发明的目的是为解决在奈奎斯特采样理论下,宽带稀疏信号载频和二维DOA参数估计需要的采样率高以及需要配对操作才能实现的问题,而提出了一种基于欠采样的信号载频与二维DOA参数估计方法。
本发明为解决上述技术问题采取的技术方案是:基于欠采样的信号载频与二维DOA参数估计方法,该方法包括以下步骤:
步骤一、建立由三维空间直角坐标系的x轴正方向和y轴正方向上均匀分布的传感器组成的L型阵列,x轴正方向上每个传感器后均连接有两个MWC通道,在其中一个MWC通道的混频模块前加入延时模块,定义加入延时模块的通道为x轴延时通道,未加入延时模块的通道为x轴非延时通道;y轴正方向上每个传感器后仅连接有一个MWC通道,定义为y轴非延时通道;
传感器接收的信号与周期为Tp的伪随机序列p(t)混频后获得混频后信号,混频后信号经过截止频率为fs/2的低通滤波器后以fs的频率进行采样,获得采样值;
所述x轴正方向上均匀分布有N个传感器{x1,x2,...,xN},所述y轴正方向上均匀分布有N个传感器{y1,y2,...,yN},且x轴和y轴在原点处共用同一个传感器,即x1和y1为同一个传感器;并且有M个互不相关的窄带目标信号si(t)入射到该L型阵列,i=1,2,…,M;
步骤二,分别将x轴正方向和y轴正方向上的N个传感器分为两个子阵,其中:x轴的第一个子阵包括传感器{x1,x2,...,xN-1},x轴的第二个子阵包括传感器{x2,x3,...,xN},y轴的第一个子阵包括传感器{y1,y2,...,yN-1},y轴的第二个子阵包括传感器{y2,y3,...,yN};
分别获得x轴非延时通道第一个子阵的采样值x1[k],x轴非延时通道第二个子阵的采样值x2[k],y轴非延时通道第一个子阵的采样值y1[k],y轴非延时通道第二个子阵的采样值y2[k],x轴延迟通道第一个子阵的采样值z1[k],x轴延迟通道第二个子阵的采样值z2[k];
步骤三、分别计算出x1[k]与y1[k]的协方差矩阵R1=E{x1[k]y1[k]
步骤四、利用R1、R2、R3、R4、R5和R6定义一个三阶张量χ(N-1)×(N-1)×4,并将三阶张量χ(N-1)×(N-1)×4的正向切片Xk的表达式作为建立的正则分解模型;
对建立的正则分解模型进行求解,获得中间变量矩阵
步骤五、利用步骤四获得的矩阵 计算中间变量 和
步骤六、利用步骤五获得的 和 计算出第i个窄带目标信号的载频估计值 方位角估计值 以及俯仰角估计值
步骤七、利用步骤六获得的 和 计算出x轴非延迟通道的阵列流型矩阵Ax,y轴非延迟通道的阵列流型矩阵Ay和x轴延迟通道的阵列流型矩阵Az;
步骤八、利用步骤七的Ax、Ay和Az恢复窄带目标信号s1(t),s2(t),...,sM(t)被调制到基带后的频谱W(f);
步骤九、利用步骤八获得的W(f)恢复出窄带目标信号的频谱S1(f),S2(f),…,SM(f)。
本发明的有益效果是:本发明的基于欠采样的信号载频与二维DOA参数估计方法,本发明利用L型延迟阵列传感器采集信号,通过调制宽带转换器系统获得三轴阵列的欠采样值,再利用三线性分解算法对获得的采样值进行奇异值分解获得信号的二维DOA和频率参数,大大降低了信号的采样率;利用延迟通道估计载频,可以直接计算三位参数估计问题,无需额外的配对操作,减小了算法复杂度,并最终恢复出信号的时域波形。
附图说明
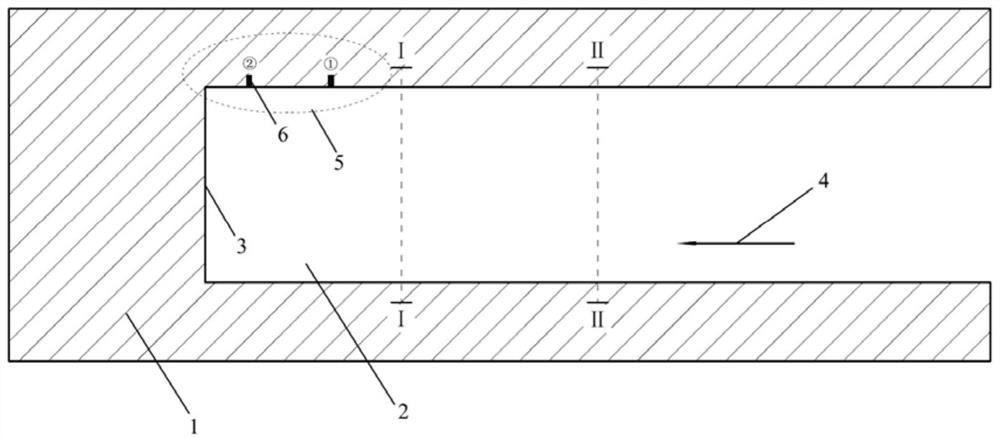
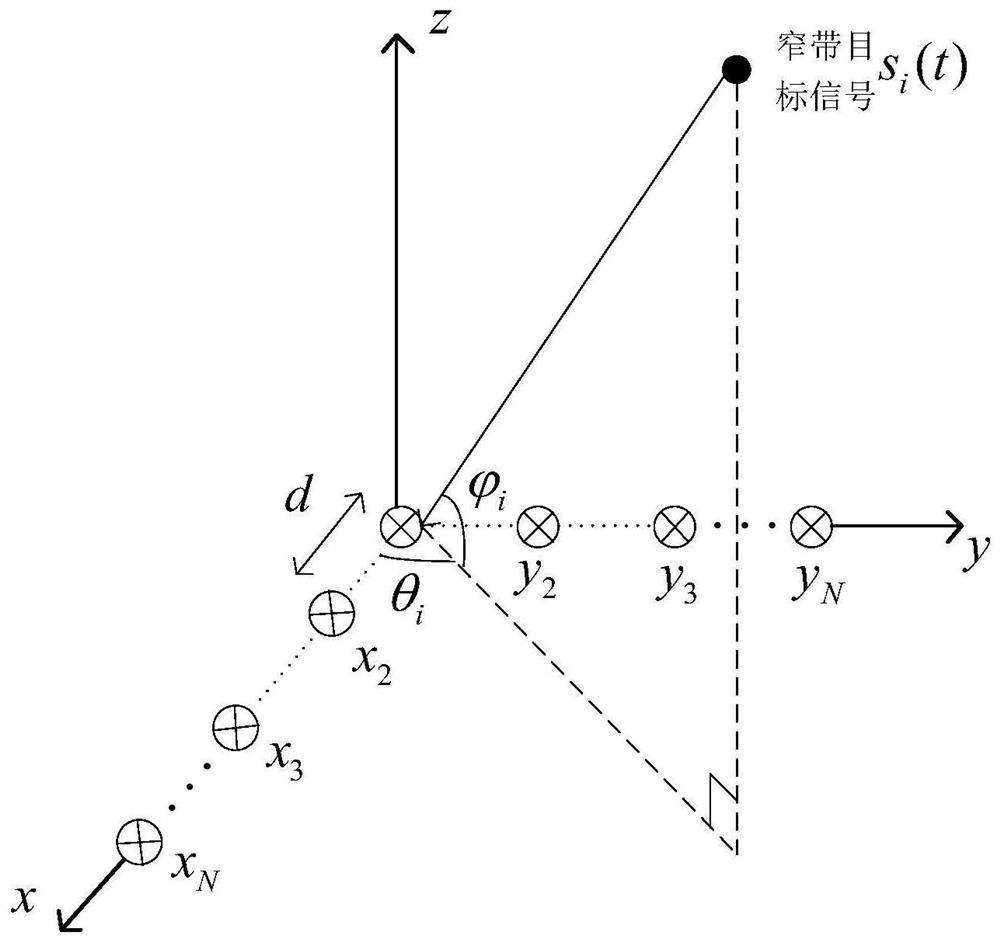
图1是本发明的L型阵列结构的示意图;
图中θi代表窄带目标信号si(t)的方位角, 代表窄带目标信号si(t)的俯仰角,x2、x3、……、xN依次代表x轴正方向上的第2个、第3个、……、第N个传感器;y轴传感器的定义类似;
图2是x轴传感器阵元结构示意图;
其中:x1[n]和z1[n]分别表示x轴第一个传感器阵元x1接收信号的非延迟MWC通道与延迟MWC通道的采样值,其他传感器阵元的定义相同;h(t)代表滤波器的脉冲响应;
图3是原点处传感器阵元接收的信号时域波形图;
图4是原点处传感器阵元接收的信号频谱图;
图5是恢复的信号时域波形图;
图6是恢复的信号频谱图;
图7是估计出的信号载频图;
图中圆圈代表原始值,星号代表估计值。
图8是估计出的二维DOA参数图。
具体实施方式
具体实施方式一:如图1所示。本实施方式所述的基于欠采样的信号载频与二维DOA参数估计方法,该方法包括以下步骤:
步骤一、建立由三维空间直角坐标系的x轴正方向和y轴正方向上均匀分布的传感器组成的L型阵列,如图2所示,x轴正方向上每个传感器后均连接有两个MWC(调制带宽转换器)通道,在其中一个MWC通道的混频模块前加入延时模块,定义加入延时模块的通道为x轴延时通道,未加入延时模块的通道为x轴非延时通道;y轴正方向上每个传感器后仅连接有一个MWC通道,定义为y轴非延时通道;
传感器接收的信号与周期为Tp的伪随机序列p(t)混频后获得混频后信号,混频后信号经过截止频率为fs/2的低通滤波器后以fs的频率进行采样,获得采样值;
所述x轴正方向上均匀分布有N个传感器{x1,x2,...,xN},所述y轴正方向上均匀分布有N个传感器{y1,y2,...,yN},且x轴和y轴在原点处共用同一个传感器,即x1和y1为同一个传感器;并且有M个互不相关的窄带目标信号si(t)入射到该L型阵列,i=1,2,…,M;
步骤二,分别将x轴正方向和y轴正方向上的N个传感器分为两个子阵,其中:x轴的第一个子阵包括传感器{x1,x2,...,xN-1},x轴的第二个子阵包括传感器{x2,x3,...,xN},y轴的第一个子阵包括传感器{y1,y2,...,yN-1},y轴的第二个子阵包括传感器{y2,y3,...,yN};
分别获得x轴非延时通道第一个子阵的采样值x1[k],x轴非延时通道第二个子阵的采样值x2[k],y轴非延时通道第一个子阵的采样值y1[k],y轴非延时通道第二个子阵的采样值y2[k],x轴延迟通道第一个子阵的采样值z1[k],x轴延迟通道第二个子阵的采样值z2[k];
步骤三、分别计算出x1[k]与y1[k]的协方差矩阵R1=E{x1[k]y1[k]
步骤四、利用R1、R2、R3、R4、R5和R6定义一个三阶张量χ(N-1)×(N-1)×4,并将三阶张量χ(N-1)×(N-1)×4的正向切片Xk的表达式作为建立的正则分解模型;
利用交替最小二乘法对建立的正则分解模型进行求解,获得中间变量矩阵
步骤五、利用步骤四获得的矩阵 计算中间变量 和
步骤六、利用步骤五获得的 和 计算出第i个窄带目标信号的载频估计值 方位角估计值 以及俯仰角估计值
步骤七、利用步骤六获得的 和 计算出x轴非延迟通道的阵列流型矩阵Ax,y轴非延迟通道的阵列流型矩阵Ay和x轴延迟通道的阵列流型矩阵Az;
步骤八、利用步骤七的Ax、Ay和Az恢复窄带目标信号s1(t),s2(t),…,sM(t)被调制到基带后的频谱W(f);
步骤九、利用步骤八获得的W(f)恢复出窄带目标信号的频谱S1(f),S2(f),…,SM(f)。
具体实施方式二:本实施方式与具体实施方式一不同的是:所述步骤一的具体过程为:
其中:x[k]、y[k]和z[k]分别为x轴非延迟通道,y轴非延迟通道和x轴延迟通道的采样值,Ax、Ay和Az分别为x轴非延迟通道,y轴非延迟通道和x轴延迟通道的阵列流型矩阵,阵列流型矩阵中元素仅与未知载频、方位角和俯仰角有关;w[k]为窄带目标信号搬移到基带后的信号,w[k]={w1[k],w2[k],…,wM[k]},w1[k],w2[k],…,wM[k]分别代表窄带目标信号s1(t),s2(t),…,sM(t)搬移到基带后的形式。
具体实施方式三:本实施方式与具体实施方式二不同的是:所述步骤二的具体过程为:
其中:x1[k]代表x轴非延迟通道的第一个子阵的采样值,x2[k]代表x轴非延迟通道的第二个子阵的采样值, 和 分别代表x轴非延迟通道的第一个子阵和第二个子阵的阵列流型矩阵;
y1[k]代表y轴非延迟通道的第一个子阵的采样值,y2[k]代表y轴非延迟通道的第二个子阵的采样值, 和 分别代表y轴非延迟通道的第一个子阵和第二个子阵的阵列流型矩阵;
z1[k]代表x轴延迟通道第一个子阵的采样值,z2[k]代表x轴延迟通道第二个子阵的采样值, 和 分别代表x轴延迟通道的第一个子阵和第二个子阵的阵列流型矩阵。
其中向量x1[k]和矩阵 是向量x[k]和矩阵Ax的前N-1行,x2[k]和 是向量x[k]和矩阵Ax的后N-1行,同理:y1[k]、y2[k]、z1[k]、z2[k]和 的定义与x1[k]、x2[k]和 的定义类似。
具体实施方式四:本实施方式与具体实施方式三不同的是:所述步骤一的具体过程为:
所述三阶张量χ(N-1)×(N-1)×4的正向切片Xk的表达式具体为:
其中:X1、X2、X3、X4、X5、X6分别代表χ(N-1)×(N-1)×4的第一、第二、第三、第四、第五、第六个正向切片,上角标T表示转置, 分别代表中间变量矩阵 转置后的第一列、第二列、第三列、第四列、第五列、第六列,且中间变量矩阵 中的第i列 为:
其中:e代表自然对数,j代表虚数单位, 代表信源相关矩阵Rw的对角线元素,信源相关矩阵Rw=E{w[k]w[k]
具体实施方式五:本实施方式与具体实施方式四不同的是:所述中间变量 和 的表达式分别为:
其中:∠(·)代表求复数的相角, 代表矩阵中第1行第i列的元素, 代表矩阵中第2行第i列的元素, 代表矩阵中第3行第i列的元素, 代表矩阵中第4行第i列的元素, 代表矩阵中第5行第i列的元素, 代表矩阵中第6行第i列的元素。
具体实施方式六:本实施方式与具
基于欠采样的信号载频与二维DOA参数估计方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0