







专利摘要
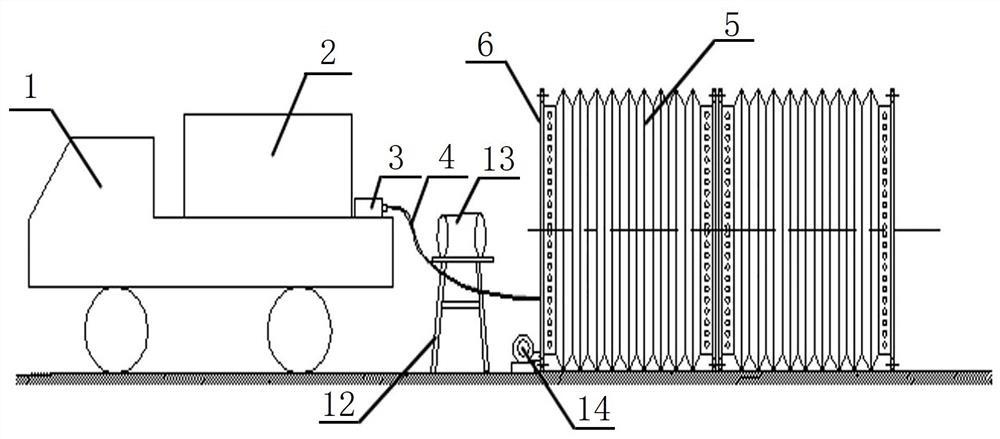
一种三维深松作业质量检测系统属农业机械技术领域,本发明中电磁波发射装置的发射器安装板和电磁波接收装置的接收器安装板前后平行排列;发射器安装板和接收器安装板位于深松机中机架Ⅰ的中横梁和后横梁之间,发射器安装板和接收器安装板两端与左纵梁和右纵梁内面固接;微计算机分别与电磁波接收装置中通信接口Ⅰ和电磁波发射装置中通信接口Ⅱ连接。本发明利用多束电磁波检测犁沟剖面的形状和位置,在检测过程中不需要人工进行松碎土壤的移除,因此测量的精度和效率都比传统方法高,并可通过微型计算机的处理快速地获取犁沟的三维图像,从而获得深松作业的耕深和深松扰动面积,为深松作业质量评估、深松机作业效率以及深松作业补贴提供数据支持。
权利要求
1.一种三维深松作业质量检测系统,由深松机(A)、电磁波发射装置(B)、电磁波接收装置(C)、机架(Ⅰ)、悬挂装置(Ⅱ)、深松装置(Ⅲ)、导线Ⅰ(1)、导线Ⅱ(2)和微计算机(3)组成,所述的深松机(A)由机架(Ⅰ)、悬挂装置(Ⅱ)和深松装置(Ⅲ)组成,机架(Ⅰ)由前横梁(4)、中横梁(5)、左纵梁(6)、后横梁(7)和右纵梁(8)组成,前横梁(4)、中横梁(5)和后横梁(7)自前向后顺序平行排列,前横梁(4)、中横梁(5)和后横梁(7)两侧分别固接左纵梁(6)和右纵梁(8),形成“日”字形;悬挂装置(Ⅱ)位于机架(Ⅰ)中前横梁(4)的前部;深松装置(Ⅲ)位于机架(Ⅰ)的中横梁(5)正中,其特征在于:电磁波发射装置(B)的发射器安装板(10)和电磁波接收装置(C)的接收器安装板(13)前后平行排列,发射器安装板(10)和接收器安装板(13)的间距s3为60-65mm;发射器安装板(10)和接收器安装板(13)位于深松机(A)中机架(Ⅰ)的中横梁(5)和后横梁(7)之间,发射器安装板(10)和接收器安装板(13)两端与左纵梁(6)和右纵梁(8)内面固接,且发射器安装板(10)和接收器安装板(13)的上平面与左纵梁(6)和右纵梁(8)上平面平齐;安装于拖拉机驾驶室的微计算机(3)经导线Ⅰ(1)与电磁波接收装置(C)中通信接口Ⅰ(11)连接,微计算机(3)经导线Ⅱ(2)与电磁波发射装置(B)中通信接口Ⅱ(14)连接。
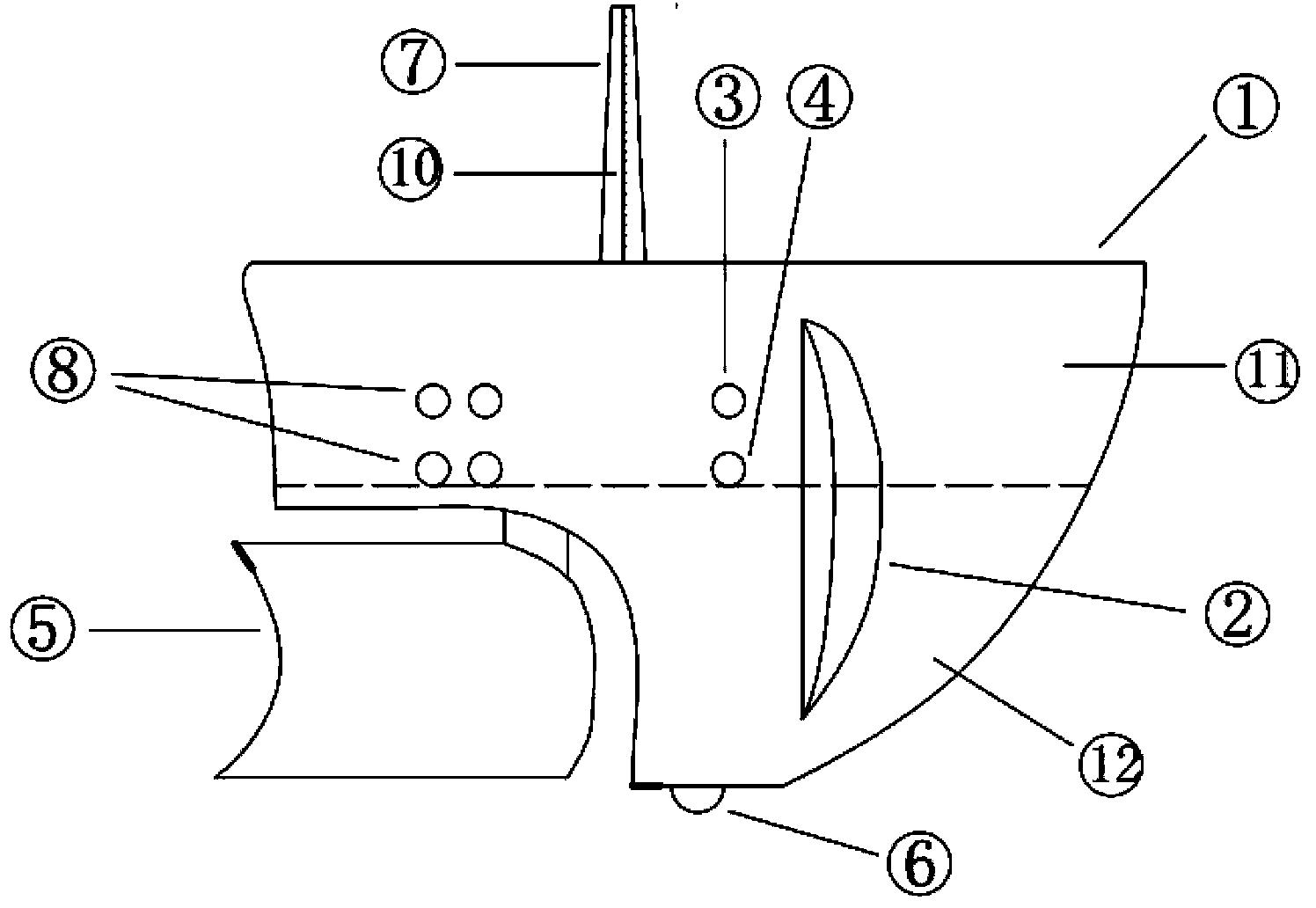
2.按权利要求书1所述的三维深松作业质量检测系统,其特征在于:所述的电磁波发射装置(B)由电磁波发射器(9)、发射器安装板(10)和通信接口Ⅰ(11)组成,其中发射器安装板(10)的长L1为600-620mm、宽W1为30-40mm、高H1为20-30mm;电磁波发射器(9)为18-22个,均布并固接于发射器安装板(10)下平面;通信接口Ⅰ(11)固接于发射器安装板(10)的上平面近右端,通信接口Ⅰ(11)与发射器安装板(10)右端面的间距s1为85-95mm。
3.按权利要求书1所述的三维深松作业质量检测系统,其特征在于:所述的电磁波接收装置(C)由电磁波接收器(12)、接收器安装板(13)和通信接口Ⅱ(14)组成,其中接收器安装板(13)的长L2为600-620mm、宽W2为60-70mm、高H2为20-30mm;电磁波接收器(12)为18-22个,均布并固接于接收器安装板(13)下平面;通信接口Ⅱ(14)固接于接收器安装板(13)的上平面近右端,通信接口Ⅱ(14)与接收器安装板(13)右端面的间距s2为85-95mm。
说明书
技术领域
本发明属于农业机械技术领域,具体涉及一种三维深松作业质量检测系统。
背景技术
深松机能够松碎土壤、打破犁底层,促进作物根系生长,使作物根系能够吸收到心土层的养分和水分,从而增加产量;同时深松能够减小降雨时的地表径流,减缓水土流失。深松作业所形成的犁沟(深松后松碎土壤与未松碎土壤的分界面)不仅能够反映深松作业的耕深,而且可以反映深松面积。因此,测量深松作业后犁沟的形状和面积对深松作业质量、深松机性能的评估具有重要的意义,同时也能为深松作业补贴提供支撑。传统的犁沟检测方法一般为深松作业后,人工将深松后松碎的土壤移除,然后利用土壤轮廓仪测量犁沟剖面的形状。这一方法工作量大、效率低、且人工移除土壤具有很大的主观性,容易造成犁沟检测不准确;同时,该方法不能连续地测量犁沟剖面形状,因此不能对深松作业后所形成的犁沟形状有一个三维上的直观认识。
由于松碎后的土壤和未松碎土壤之间孔隙度不同,介电特性也有所差异,因此当电磁波射入土壤中时,电磁波在两者的界面上会产生反射波,对反射的电磁波进行接收,并根据收发电磁波的时间差、接收信号强度以及接收回波的形态等参数就能够对分界面进行定位和识别。当在某一犁沟剖面上发射多束电磁波时,就能获得犁沟剖面上的多个点,利用微计算机对这些点进行拟合即可以得到此处的犁沟剖面形状和大小;沿着深松方向将连续获取的犁沟剖面进行拟合即可以得到犁沟的三维图像。
发明内容
本发明的目的是提供一种三维深松作业质量检测系统,该系统可以通过发射电磁波和接受电磁波检测出深松作业后所形成犁沟的形状和位置,同时利用微计算机将沿深松方向连续获取的犁沟剖面进行拟合得到犁沟的三维图像;本发明能够实时、快速地检测出深松作业后犁沟的形状和大小,得到深松作业深度和深松作业扰动面积,可以便捷、直观地评估深松作业质量、深松机作业效率;同时可以为深松作业补贴提供数据支持。
本发明由深松机A、电磁波发射装置B、电磁波接收装置C、机架Ⅰ、悬挂装置Ⅱ、深松装置Ⅲ、导线Ⅰ1、导线Ⅱ2和微计算机3组成,所述的深松机A由机架Ⅰ、悬挂装置Ⅱ和深松装置Ⅲ组成,机架Ⅰ由前横梁4、中横梁5、左纵梁6、后横梁7和右纵梁8组成,前横梁4、中横梁5和后横梁7自前向后顺序平行排列,前横梁4、中横梁5和后横梁7两侧分别固接左纵梁6和右纵梁8,形成“日”字形;悬挂装置Ⅱ位于机架Ⅰ中前横梁4的前部;深松装置Ⅲ位于机架Ⅰ的中横梁5正中。
电磁波发射装置B的发射器安装板10和电磁波接收装置C的接收器安装板13前后平行排列,发射器安装板10和接收器安装板13的间距s3为60-65mm;发射器安装板10和接收器安装板13位于深松机A中机架Ⅰ的中横梁5和后横梁7之间,发射器安装板10和接收器安装板13两端与左纵梁6和右纵梁8内面固接,且发射器安装板10和接收器安装板13的上平面与左纵梁6和右纵梁8上平面平齐;安装于拖拉机驾驶室的微计算机3经导线Ⅰ1与电磁波接收装置C中通信接口Ⅰ11连接,微计算机3经导线Ⅱ2与电磁波发射装置B中通信接口Ⅱ14连接。
所述的电磁波发射装置B由电磁波发射器9、发射器安装板10和通信接口Ⅰ11组成,其中发射器安装板10的长L1为600-620mm、宽W1为30-40mm、高H1为20-30mm;电磁波发射器9为18-22个,均布并固接于发射器安装板10下平面;通信接口Ⅰ11固接于发射器安装板10的上平面近右端,通信接口Ⅰ11与发射器安装板10右端面的间距s1为85-95mm。
所述的电磁波接收装置C由电磁波接收器12、接收器安装板13和通信接口Ⅱ14组成,其中接收器安装板13的长L2为600-620mm、宽W2为60-70mm、高H2为20-30mm;电磁波接收器12为18-22个,均布并固接于接收器安装板13下平面;通信接口Ⅱ14固接于接收器安装板13的上平面近右端,通信接口Ⅱ14与接收器安装板13右端面的间距s2为85-95mm。
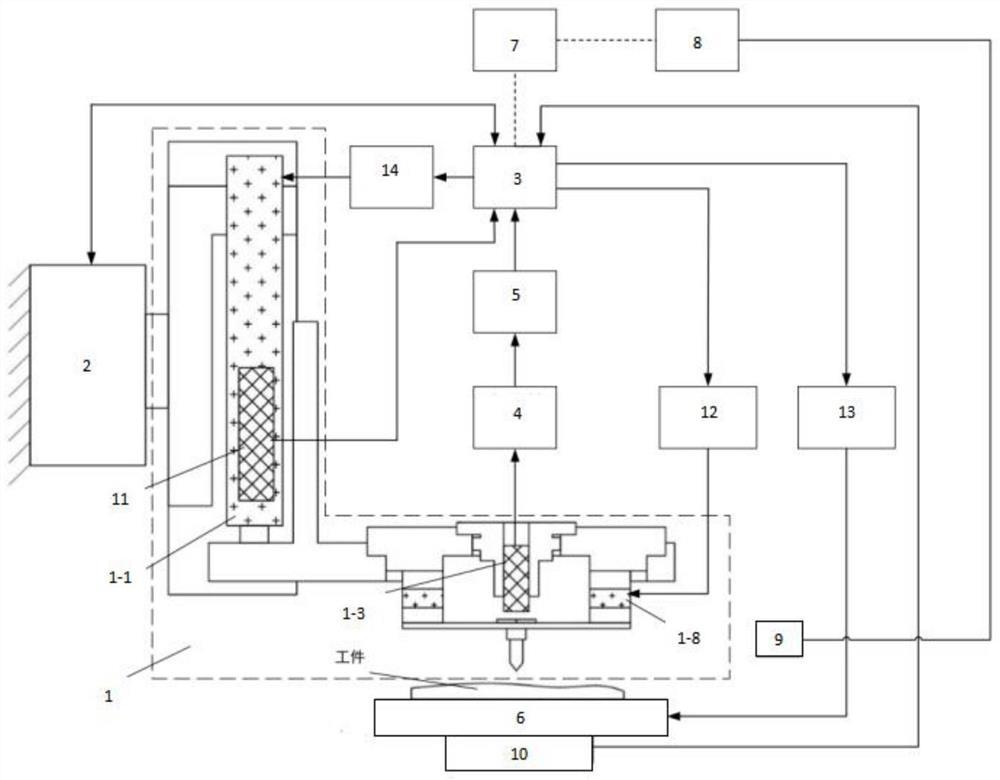
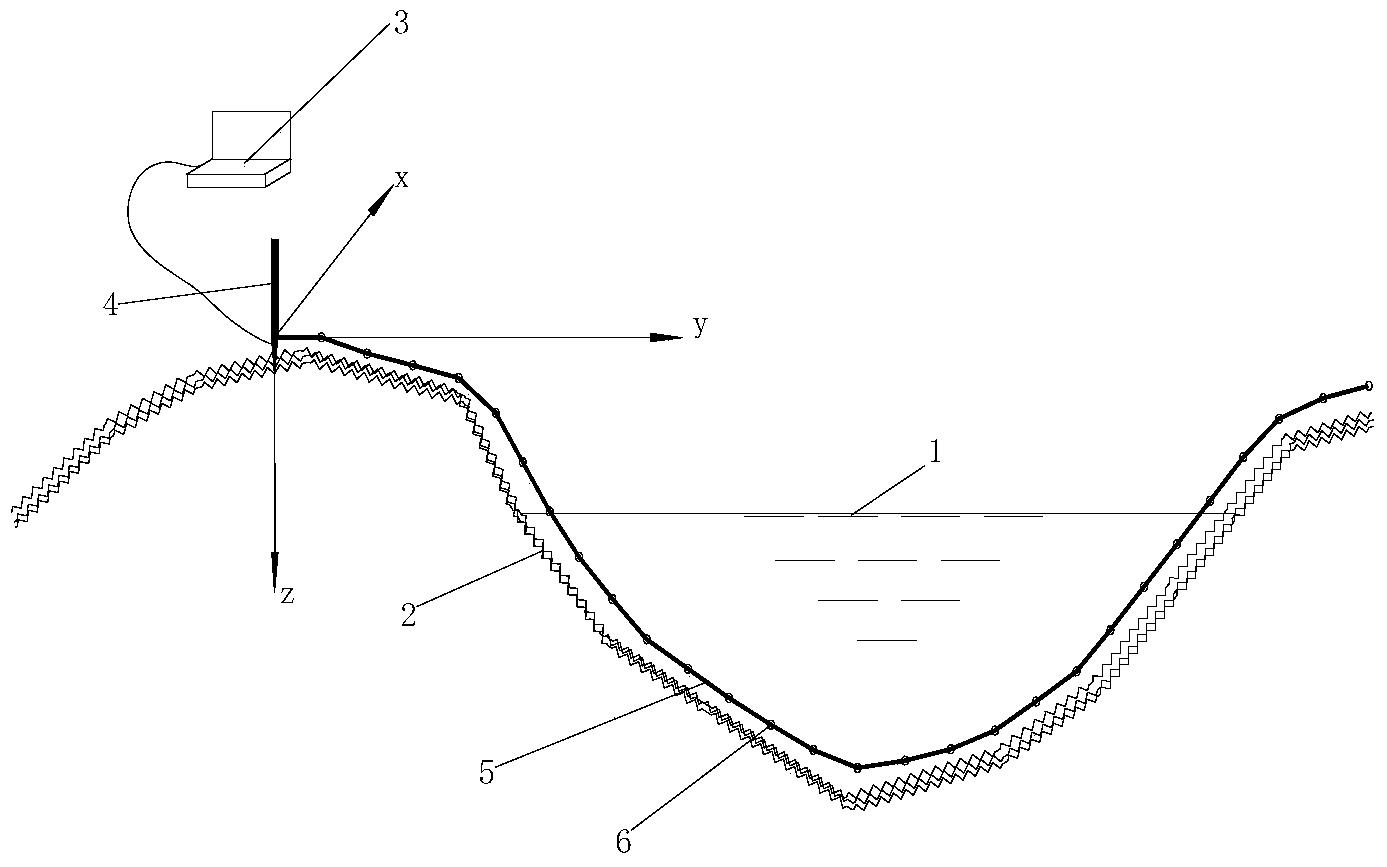
本发明的原理为:当向土壤中发射电磁波时,由于空气和土壤表面、松碎土壤和未松碎土壤间的介电特性存在差异,因此电磁波会在这两种界面发生反射;由于深松机具有向前的工作速度,当回波反射回来后恰好能被电磁波接收器所接收,然后再将接收到的回波信息传输到微计算机进行处理。通过微型计算机对回波进行处理后,能够得到地面回波信号到电磁波接收器的时间t1,犁沟回波信号到地面回波信号的时间间隔t2。若电磁波在空气中的传播速度为v1,在松碎土壤中的传播速度为v2,则可以计算出机架到地面的距离L3=v1t1以及地面到犁沟的距离L4=v2t2。通过对其他电磁波进行同样的处理后,便可以知道整个犁沟剖面的形状以及此处地表的形状,从而获得犁沟的剖面形状。随着深松机的不断前进,电磁波发射装置和电磁波接收装置不断地发射电磁波和接收回波信息,从而获得一系列连续犁沟的剖面形状和位置,通过微计算机对犁沟剖面进行处出理即可合成出犁沟和地表的三维图像。
本发明的工作过程为:在深松机的深松过程中,电磁波发射器和电磁波接收器不断地发射和接收电磁波,通过微计算器对回波进行处理后,能够得到深松后的犁沟的三维形状,从而获取到深松的深松深度、深松作业扰动面积的信息。
本发明利用多束电磁波检测犁沟剖面的形状和位置,在检测过程中不需要人工进行松碎土壤的移除,因此测量的精度和效率都比传统方法高,并可通过微型计算机的处理快速地获取犁沟的三维图像,从而获得深松作业的耕深和深松扰动面积,为深松作业质量评估、深松机作业效率以及深松作业补贴提供数据支持。
附图说明
图1为三维深松作业质量检测系统的立体图
图2为深松机的俯视图
图3为机架的俯视图
图4为电磁波发射装置的仰视图
图5为电磁波发射装置的正视图
图6为电磁波接收装置的仰视图
图7为电磁波接收装置的正视图
图8为机架和电磁波发射装置、电磁波接收装置的俯视图
图9为电磁波发射示意图
图10为电磁波接收示意图
图11为犁沟回波示意图
其中:A.深松机 B.电磁波发射装置 C.电磁波接收装置 Ⅰ.机架 Ⅱ.悬挂装置 Ⅲ.深松装置 1.导线Ⅰ 2.导线Ⅱ 3.微计算机 4.前横梁 5.中横梁 6.右纵梁 7.后横梁8.左纵梁 9.电磁波发射器 10.发射器安装板 11.通信接口Ⅰ 12.电磁波接收器 13.接收器安装板 14.通信接口Ⅱ a.松碎土壤 b.未松碎土壤 c.地表回波信号 d.犁沟回波信号
具体实施方式
下面结合附图对本发明进行描述。
如图1、图2、图3和图4所示,本发明由深松机A、电磁波发射装置B、电磁波接收装置C、机架Ⅰ、悬挂装置Ⅱ、深松装置Ⅲ、导线Ⅰ1、导线Ⅱ2和微计算机3组成,所述的深松机A由机架Ⅰ、悬挂装置Ⅱ和深松装置Ⅲ组成,机架Ⅰ由前横梁4、中横梁5、左纵梁6、后横梁7和右纵梁8组成,前横梁4、中横梁5和后横梁7自前向后顺序平行排列,前横梁4、中横梁5和后横梁7两侧分别固接左纵梁6和右纵梁8,形成“日”字形;悬挂装置Ⅱ位于机架Ⅰ中前横梁4的前部;深松装置Ⅲ位于机架Ⅰ的中横梁5正中。
电磁波发射装置B的发射器安装板10和电磁波接收装置C的接收器安装板13前后平行排列,发射器安装板10和接收器安装板13的间距s3为60-65mm;发射器安装板10和接收器安装板13位于深松机A中机架Ⅰ的中横梁5和后横梁7之间,发射器安装板10和接收器安装板13两端与左纵梁6和右纵梁8内面固接,且发射器安装板10和接收器安装板13的上平面与左纵梁6和右纵梁8上平面平齐;安装于拖拉机驾驶室的微计算机3经导线Ⅰ1与电磁波接收装置C中通信接口Ⅰ11连接,微计算机3经导线Ⅱ2与电磁波发射装置B中通信接口Ⅱ14连接。
如图5、图6所示,所述的电磁波发射装置B由电磁波发射器9、发射器安装板10和通信接口Ⅰ11组成,其中发射器安装板10的长L1为600-620mm、宽W1为30-40mm、高H1为20-30mm;电磁波发射器9为18-22个,均布并固接于发射器安装板10下平面;通信接口Ⅰ11固接于发射器安装板10的上平面近右端,通信接口Ⅰ11与发射器安装板10右端面的间距s1为85-95mm。
如图7、图8所示,所述的电磁波接收装置C由电磁波接收器12、接收器安装板13和通信接口Ⅱ14组成,其中接收器安装板13的长L2为600-620mm、宽W2为60-70mm、高H2为20-30mm;电磁波接收器12为18-22个,均布并固接于接收器安装板13下平面;通信接口Ⅱ14固接于接收器安装板13的上平面近右端,通信接口Ⅱ14与接收器安装板13右端面的间距s2为85-95mm。
如图9、图10所示,当电磁波发射器向土壤中发射电磁波时,由于空气和土壤表面、松碎土壤和未松碎土壤间的介电特性存在差异,因此电磁波会在这两种界面发生反射;由于深松机具有向前的工作速度,当回波反射回来后恰好能被电磁波接收器所接收,然后再将接收到的回波信息传输到微计算机进行处理。
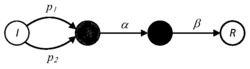
如图11所示,以第二束回波信号Ⅰ1为例,通过微型计算机对回波进行处理后,能够得到地面回波信号到电磁波接收器的时间t1,犁沟回波信号到地面回波信号的时间间隔t2。若电磁波在空气中的传播速度为v1,在松碎土壤中的传播速度为v2,则可以计算出机架到地面的距离L3=v1t1以及地面到犁沟的距离L4=v2t2。通过对其他电磁波进行同样的处理后,便可以知道整个犁沟剖面的形状以及此处地表的形状,从而获得犁沟的剖面形状。随着深松机的不断前进,电磁波发射装置和电磁波接收装置不断地发射电磁波和接收回波信息,从而获得一系列连续犁沟的剖面形状和位置,通过微计算机对犁沟剖面进行处出理即可合成出犁沟和地表的三维图像,从而可以获取到深松的深松深度、深松扰动面积的信息。
一种三维深松作业质量检测系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0