






专利摘要
一种适用于激流环境下的水下地形自动探测装置,它包括主体、平衡翼、激光测距仪、传感器、超声波测深仪、GPS流动站、GPS基准站、标尺、舵、计算机芯片、数据存储单元、LCD显示屏和电池;平衡翼、激光测距仪的发射器与接收器和传感器的探头位于主体两侧,LCD显示屏安装于主体上部,舵位于主体尾部,激光测距仪、超声波测深仪、传感器、数据存储单元、电池与计算机芯片密封于主体的工作舱中,GPS流动站安装在主体的工作舱内,GPS流动站天线位于主体上部,用防水材料包裹;GPS基准站放置于岸上空地,超声波测深仪的换能器安装在主体外部底面,标尺在GPS流动站天线外部;本发明在水下地形测量设备技术领域里有广阔的应用前景。
权利要求
1.一种适用于激流环境下的水下地形自动探测装置,其特征在于:它包括主体、平衡翼、激光测距仪、传感器、超声波测深仪、GPS流动站、GPS基准站、标尺、舵、计算机芯片、数据存储单元、LCD显示屏和电池;平衡翼、激光测距仪的发射器与接收器和传感器的探头位于主体两侧,LCD显示屏安装于主体上部,用来显示激光测距仪、超声波测深仪、传感器和GPS流动站的数据信息;舵位于主体尾部,计算机芯片确定该装置位置后,将信息转化为电信号,控制位于主体尾部的舵运动,从而改变装置航线;激光测距仪、超声波测深仪、传感器、数据存储单元、电池与计算机芯片密封于主体的工作舱中,GPS流动站安装在主体的工作舱内,GPS流动站天线位于主体上部,用防水材料包裹;GPS基准站放置于岸上空地,防止信号和通讯受到干扰;超声波测深仪的换能器安装在主体外部底面,向水底发射超声波;标尺在GPS流动站天线外部,标尺上刻度代表的意义是从换能器底部到水面的距离;
所述主体的制作材料是聚氯乙烯,形状为梭形,纵向剖面为倒三角形,宽部朝上,尖部朝下;主体内部分为两部分:下部是工作舱,采用静态密封,用来安置各种仪器设备、数据存储单元、计算机芯片;上部是浮力舱,内部有充气气囊,气囊体积大小通过充气阀调节,这样控制浮力舱内气囊的体积大小就控制整个装置的重心位置,以控制装置在水中的位置;
所述平衡翼的制作材料是聚氯乙烯,形状是弧形;平衡翼焊接在主体靠近前进方向的前端,方向垂直于水平面,有预定的弧度,用来保持该装置在水中的运动方向同时提供装置前进的动力;
所述激光测距仪采用改进的手持激光测距仪,将手持激光测距仪的外壳去掉,分离出仪器主要部分、激光发射器与接收器、主板、LCD显示、电源;将仪器上述部分固定于装置主体中,静态密封;激光测距仪的激光发射器与接收器透过主体两侧的小孔穿出,激光发射器不断向两侧发射激光,激光照射到河岸后反射,接收器接收反射的激光,小孔位于主体两侧中部,孔隙处用橡胶密封,防止渗水;其主板与装置的计算机芯片连接,实现装置位置的确定和控制;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接;
所述传感器是多参数型水质传感器,从水浅5cm到水深60m,现场即刻读出多项水质参数,包括电导率、浊度、PH、溶解氧和温度;传感器主体部分密封于主体工作舱内,传感器探头透过主体两侧的小孔穿出,小孔位于主体两侧后部,孔隙处用橡胶密封,防止渗水;传感器通过I/O接口与装置计算机芯片和数据存储单元连接,实现水质的自动分析与记录;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接;
所述超声波测深仪是普通超声波测深仪的改进,测量范围是0.5m到100m,将超声波测深仪外壳去掉,主体部分密封于主体工作舱内,通过I/O接口将其与计算机芯片和数据存储单元连接,实现仪器的自动控制和数据存储;超声波测深仪换能器安装在主体外部底面,向水底发射超声波,并接收反射回来的超声波来确定水底高程;超声波测深仪采用多波束测深技术,该技术属于面测量,能扫描水下一个面区域,通过改变波束开角来改变对水下的扫描区域范围,节约了测量时间,减少了工作量;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接;
所述GPS流动站是GPS接收机,即作为流动站使用,又能作为基站使用;GPS流动站主体部分安装在主体工作舱内,天线位于主体上部,用防水材料包裹;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接;
所述GPS基准站是与GPS流动站相同的GPS接收机,放置于岸上没有成片障碍物的空地,用三脚架撑起,防止信号和通讯受到干扰;通过GPS流动站与GPS基准站配合,使用GPS-RTK技术,就能精确测量该装置的平面坐标;
所述标尺的精度为1mm,量程为200mm,刻在GPS天线包裹材料外部;标尺上刻度代表的意义是从超声波测深仪换能器底部到水面的距离,这样每次测深仪测量的高程加上标尺上与水面齐平的刻度,即得到校正后的水面高程;
所述的舵是流线型舵,它位于该装置主体尾部,计算机芯片确定该装置位置后,将信息转化为电信号,控制位于主体尾部的舵运动,从而改变该装置航线;
所述计算机芯片采用平板电脑芯片,该计算机芯片用来接收激光测距仪的信号,计算装置在水体中的位置,控制舵的运动来改变装置位置;控制传感器、超声波测深仪和GPS流动站的工作;控制LCD显示屏显示数据;
所述数据存储单元采用Flash存储芯片,该数据存储单元用来存储装置每个时间点的空间坐标数据、测量水深数据以及常规水质指标数据,待测量完毕后通过RS232接口导出到电脑中进行数据处理分析,计算机芯片、数据存储单元和I/O接口集成于一片单片机上,单片机静态密封于装置工作舱内;
所述LCD显示屏是字符点阵液晶显示屏,其上显示的数据由装置计算机芯片控制;它安装于主体上部,用来显示激光测距仪、超声波测深仪、传感器和GPS流动站的数据信息;
所述电池是大容量可充电锂电池组;该电池用来维持激光测距仪、传感器、超声波测深仪、GPS流动站、舵、计算机芯片以及数据存储单元的正常工作。
说明书
技术领域
本发明涉及的是一种适用于激流环境下的水下地形自动探测装置。本装置采用半潜式设计,在激流中漂流前进过程中,使用DGPS(Difference Global Positioning System)系统和超声波测深系统来探测河流的水下地形,同时利用传感器检测河流的常规水质指标。属于水下地形测量设备技术领域。
背景技术
为了指导水利工程建设、河流湖泊资源开发、防洪减灾等,在各种水工程实施之前,水下地形测量、水下地形图的绘制是必须的准备工作。目前,关于水下地形测量的方法已经有了很多,大体原理是利用定位系统获取空间坐标数据,利用测深仪获取水下每点的高程数据,将二者结合即可完成水下地形的测量。利用此原理,结合不同类型的定位系统和测深仪器的各种水下地形测量装置也一一出现。囿于设计思路和仪器限制,现阶段的水下地形测量装置大部分都只能在水流平缓、水面平静的河流、湖泊或者水库应用,但是,一些特殊的水利工程建设、资源开发、防洪减灾等任务需要在水流湍急的河段展开,这就需要一种新型的适用于激流环境下的水下地形测量装置。
发明内容
1、目的:本发明的目的在于提供一种适用于激流环境下的水下地形自动探测装置,它是一种自主航行的、能在激流环境下测量水下地形并兼具水质检测功能的自动装置,以填补在激流环境下水下地形测量方面的空白,为河流、湖泊激流环境下水利工程建设、河流资源开发、防洪减灾等活动提供必要的前期基础资料。随着测绘技术的高速发展,利用3S技术和水体测深技术来测量水下地形的技术已经十分成熟。目前,大部分的水下地形测量依靠舰船测量,将测量装备安装在舰船上,人工操纵舰船航行同时探测水下地形;能够脱离人工操纵,实现自主水下地形测量的装置比较少,能在激流环境下测量水下地形的装置则还没有开发出来。出于节约资源的考虑和特殊环境下水工程建设的需要,水下地形测绘对能够自主航行的、在激流环境下工作的水下地形测量装置需求越来越迫切。
2、技术方案:本发明一种适用于激流环境下的水下地形自动探测装置,它包括主体、平衡翼、激光测距仪、传感器、超声波测深仪、GPS流动站、GPS基准站、标尺、舵、计算机芯片、数据存储单元、LCD显示屏和电池。它们之间的位置连接关系是:平衡翼、激光测距仪的发射器与接收器和传感器的探头位于主体两侧,LCD显示屏安装于主体上部,用来显示激光测距仪、超声波测深仪、传感器和GPS流动站的数据信息;舵位于主体尾部,计算机芯片确定该装置位置后,将信息转化为电信号,控制位于主体尾部的舵运动,从而改变装置航线;激光测距仪、超声波测深仪、传感器、数据存储单元、电池与计算机芯片密封于主体的工作舱中,GPS流动站安装在主体的工作舱内,GPS流动站天线位于主体上部,用防水材料包裹;GPS基准站放置于岸上空地,防止信号和通讯受到干扰;超声波测深仪的换能器安装在主体外部底面,向水底发射超声波;标尺在GPS流动站天线外部,标尺上刻度代表的意义是从换能器底部到水面的距离。
所述主体的制作材料是聚氯乙烯(PVC),形状为梭形,纵向剖面为倒三角形,宽部朝上,尖部朝下。主体内部分为两部分:下部是工作舱,采用静态密封,用来安置各种仪器设备、数据存储单元、计算机芯片等模块;上部是浮力舱,内部有充气气囊,气囊体积大小可以通过充气阀调节,这样控制浮力舱内气囊的体积大小就可以控制整个装置的重心位置,以控制装置在水中的位置。
所述平衡翼的制作材料是聚氯乙烯(PVC),形状是弧形。平衡翼焊接在主体靠近前进方向的前端,方向垂直于水平面,有预定的弧度,可以用来保持该装置在水中的运动方向同时提供装置前进的动力。
所述激光测距仪采用改进的手持激光测距仪。将手持激光测距仪的外壳去掉,分离出仪器主要部分、激光发射器与接收器、主板、LCD显示、电源。将仪器上述部分固定于装置主体中,静态密封;激光测距仪的激光发射器与接收器透过主体两侧的小孔穿出,激光发射器不断向两侧发射激光,激光照射到河岸后反射,接收器接收反射的激光,小孔位于主体两侧中部,孔隙处用橡胶密封,防止渗水;其主板与装置的计算机芯片连接,实现装置位置的确定和控制;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接。
所述传感器是多参数型水质传感器,从水浅5cm到水深60m,可以现场即刻读出多项水质参数,包括电导率、浊度、PH、溶解氧和温度。传感器主体部分密封于主体工作舱内,传感器探头透过主体两侧的小孔穿出,小孔位于主体两侧后部,孔隙处用橡胶密封,防止渗水。传感器通过I/O接口与装置计算机芯片和数据存储单元连接,可以实现水质的自动分析与记录;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接。
所述超声波测深仪是普通超声波测深仪的改进,测量范围是0.5m到100m。将超声波测深仪外壳去掉,主体部分密封于主体工作舱内,通过I/O接口将其与计算机芯片和数据存储单元连接,实现仪器的自动控制和数据存储。超声波测深仪换能器安装在主体外部底面,向水底发射超声波,并接收反射回来的超声波来确定水底高程。超声波测深仪采用多波束测深技术,该技术属于面测量,可以扫描水下一个面区域,通过改变波束开角来改变对水下的扫描区域范围,大大节约了测量时间,减少了工作量;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接。
所述GPS流动站是GPS接收机,即可以作为流动站使用,又可以作为基站使用。GPS流动站主体部分安装在主体工作舱内,天线位于主体上部,用防水材料包裹;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接。
所述GPS基准站是与GPS流动站相同的GPS接收机,放置于岸上没有成片障碍物的空地,用三脚架撑起,防止信号和通讯受到干扰。通过GPS流动站与GPS基准站配合,使用GPS-RTK技术,就能精确测量该装置的平面坐标。
所述标尺的精度为1mm,量程为200mm,刻在GPS天线包裹材料外部。标尺上刻度代表的意义是从超声波测深仪换能器底部到水面的距离。这样每次测深仪测量的高程加上标尺上与水面齐平的刻度,即可得到校正后的水面高程。
所述的舵是流线型舵,它位于该装置主体尾部,计算机芯片确定该装置位置后,将信息转化为电信号,控制位于主体尾部的舵运动,从而改变该装置航线。
所述计算机芯片采用平板电脑芯片,平板电脑芯片的计算能力足以满足本装置的工作要求。计算机芯片用来接收激光测距仪的信号,计算装置在水体中的位置,控制舵的运动来改变装置位置;控制传感器、超声波测深仪和GPS流动站的工作;控制LCD显示屏显示数据。
所述数据存储单元采用Flash存储芯片。该数据存储单元用来存储装置每个时间点的空间坐标数据、测量水深数据以及常规水质指标数据,待测量完毕后可以通过RS232接口导出到电脑中进行数据处理分析。计算机芯片、数据存储单元和I/O接口集成于一片单片机上,单片机静态密封于装置工作舱内。
所述LCD显示屏是字符点阵液晶显示屏,其上显示的数据由装置计算机芯片控制;它安装于主体上部,用来显示激光测距仪、超声波测深仪、传感器和GPS流动站的数据信息。
所述电池是大容量可充电锂电池组;该电池用来维持激光测距仪、传感器、超声波测深仪、GPS流动站、舵、计算机芯片以及数据存储单元的正常工作。
工作时,首先调节浮力舱体积的大小,使装置主体没于水面之下,只留GPS天线和标尺位于水面之上,以使激光测距工作在水面之下进行,来规避激流环境下水体表面湍流对测距工作的影响。装置航行的位置处于河道中心线上,这样通过超声波测深仪和GPS定位系统,就可以测量河道中心线向左右延伸一定范围内的水下地形;方向的保持是通过两侧的平衡翼来实现的,方向的控制是通过激光测距仪、计算机芯片和舵来实现的。
侧面两个平衡翼受到水流冲击力,并将水流冲击力转化为动力而使整个装置向前运动;并且由于左右的平衡翼面积大小相同,左右受到的力相同,有助于使装置保持前进方向平行于河岸而不易倾斜。
侧面的激光测距装置与计算机芯片配合,用来确定装置在水体中的位置。主体侧面的激光发射器向河两岸发射激光,激光照射到河岸后反射回来,接收器接收河岸反射回来的激光,并将距离数据传输给计算机芯片,计算机芯片通过计算,确定装置在水中的位置,同时计算机芯片计算装置距离河道中心线的距离,并将距离信息转化为电信号,控制主体尾部的舵改变航行方向,使装置向河道中心线靠拢,并确保装置一直在河道中心线附近航行。这就实现了装置的自主航行。
测量时,中线及其附近的空间坐标信息可以由GPS定位系统获得,中线及其附近一定区域的水深信息可由超声波测深仪获得,PH、浊度、温度等常规水质指标数据可以由侧面的传感器探头获得,以上数据实时存入装置的数据存储单元,待测量完毕后可由电脑导出,进行水下地形图的绘制和水质分析。
3、优点及功效:本发明是一种自主航行的、能在激流环境下测量水下地形并兼具水质检测功能的自动装置,它构思巧妙,结构简单,体积小,重量轻,成本低,为河流、湖泊激流环境下的水利工程建设、河流资源开发、防洪减灾等活动提供必要的前期基础资料。
附图说明
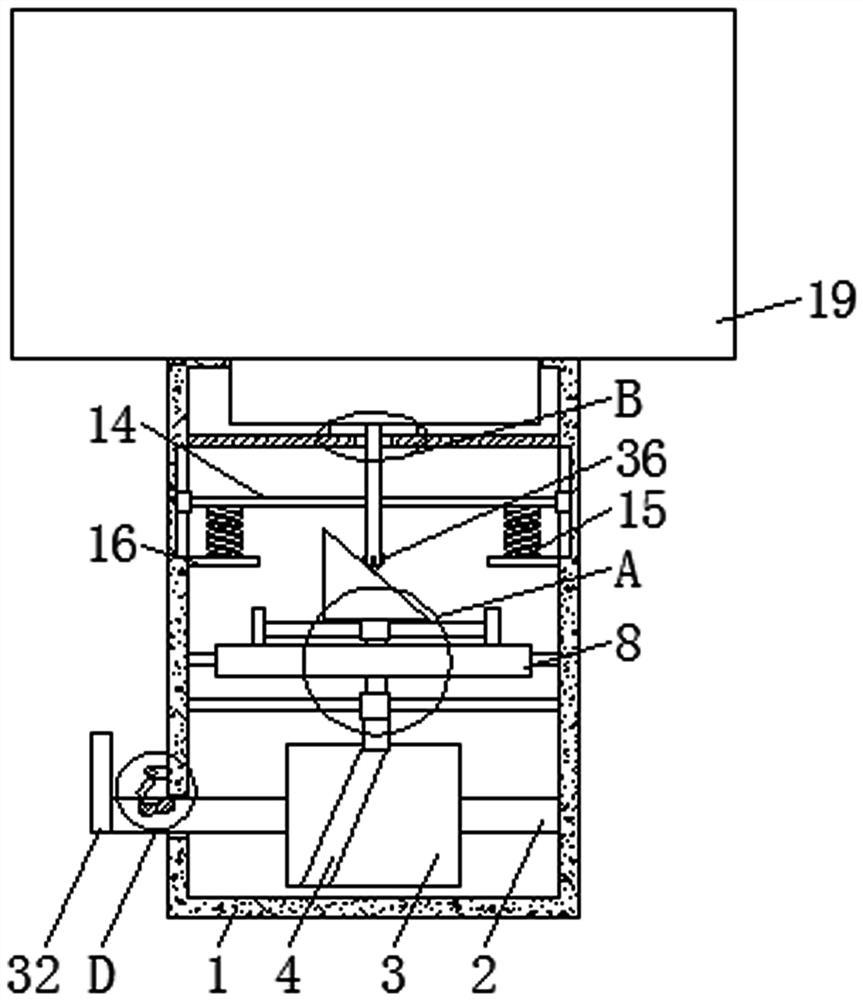
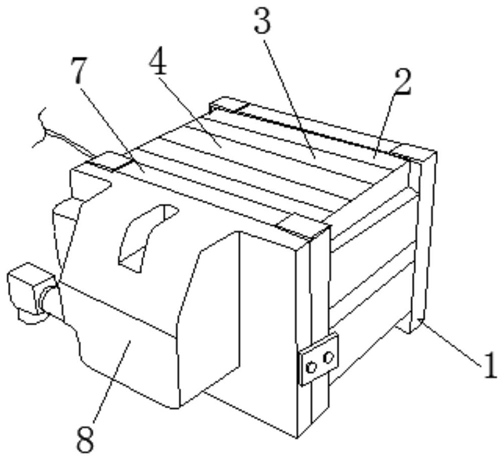
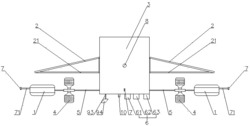
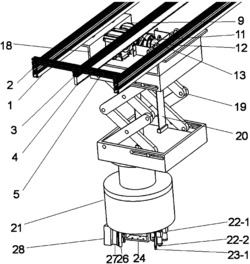
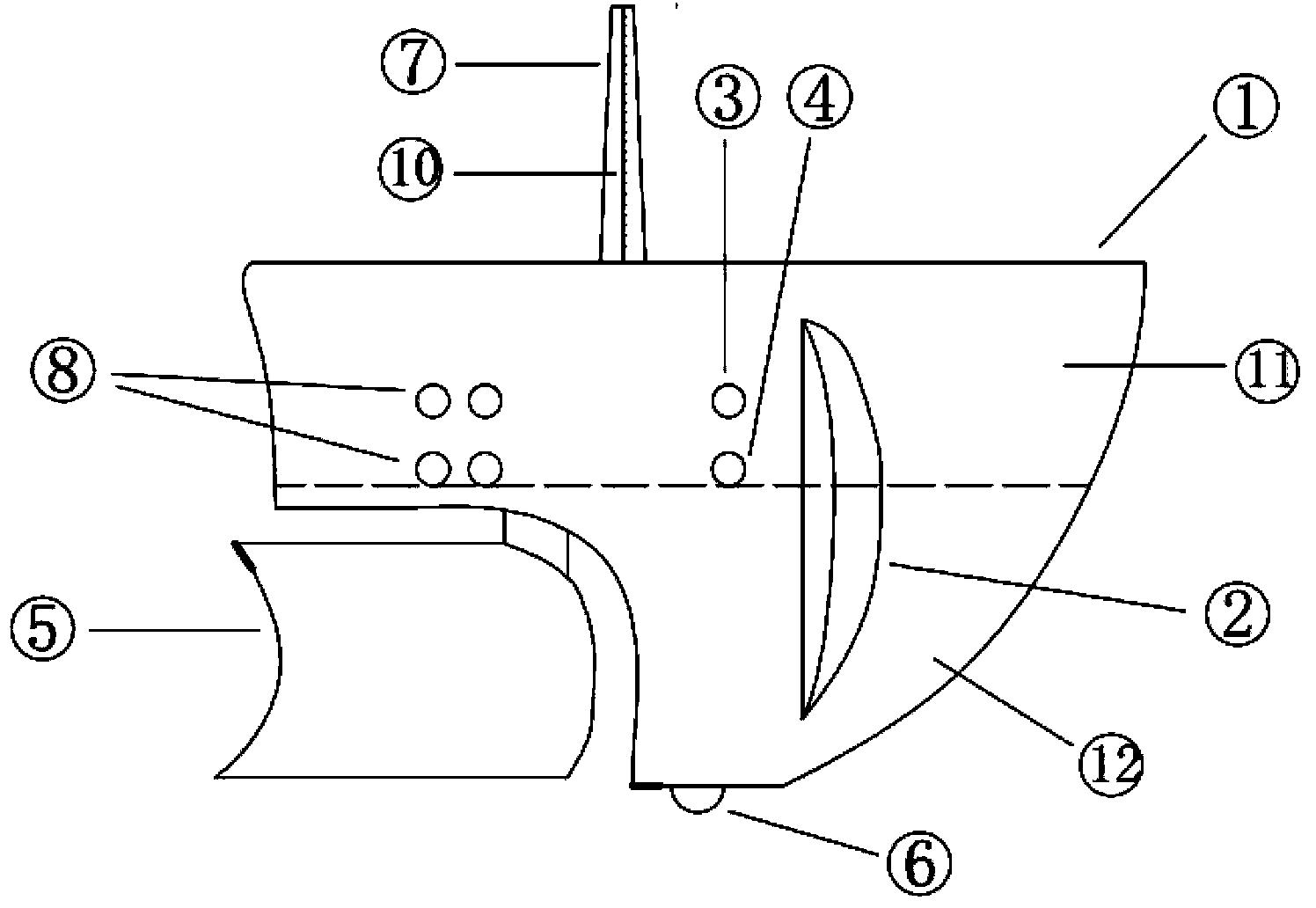
图1为本发明装置侧视图;
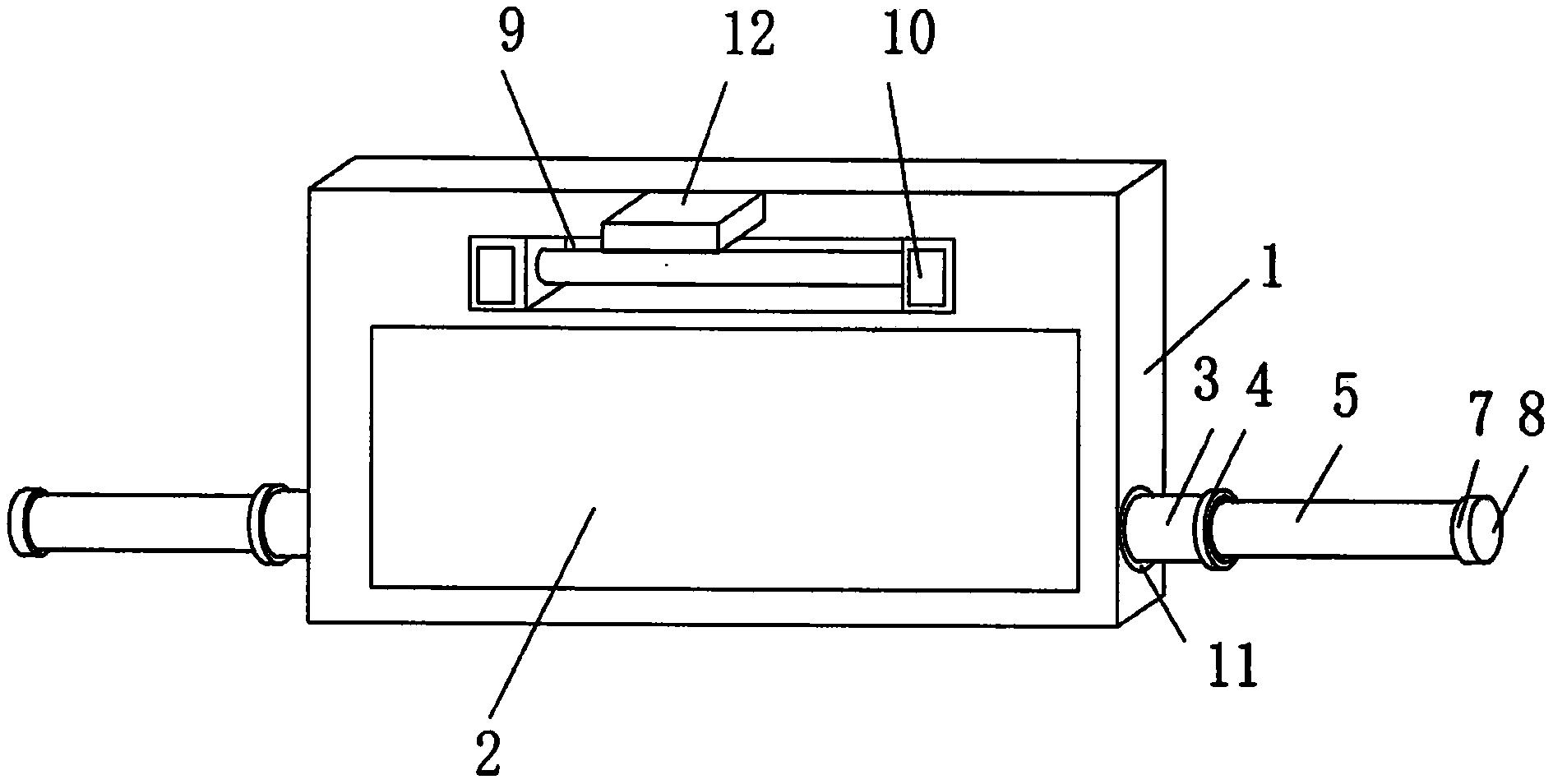
图2为本发明装置俯视图;
图3为本发明装置后视图。
图中符号说明如下:
①主体②平衡翼③激光测距仪发射器④激光测距仪接收器
⑤舵⑥超声波测深仪换能器⑦GPS流动站天线⑧水质指标传感器探头
⑨LCD显示屏⑩标尺 主体浮力舱 主体工作舱
具体实施方式
见图1、图2、图3,本发明一种适用于激流环境下的水下地形自动探测装置,它包括主体①、平衡翼②、激光测距仪、传感器、超声波测深仪、GPS流动站、GPS基准站、标尺⑩、舵⑤、计算机芯片、数据存储单元、LCD显示屏⑨和电池。它们之间的位置连接关系是:平衡翼②、激光测距仪发射器③与激光测距仪接收器④和水质指标传感器探头⑧位于主体①两侧,LCD显示屏⑨安装于主体①上部,用来显示激光测距仪、超声波测深仪、传感器和GPS流动站的数据信息;舵⑤位于主体①尾部,计算机芯片确定装置位置后,将信息转化为电信号,控制位于主体①尾部的舵运动,从而改变装置航线;激光测距仪、超声波测深仪、传感器、数据存储单元、电池与计算机芯片密封于主体工作舱 中,GPS流动站安装在主体工作舱 内,GPS流动站天线⑦位于主体①上部,用防水材料包裹;GPS基准站放置于岸上空地,防止信号和通讯受到干扰;超声波测深仪换能器⑥安装在主体①外部底面,向水底发射超声波;标尺⑩在GPS流动站天线⑦外部,标尺⑩上刻度代表的意义是从超声波测深仪换能器⑥底部到水面的距离。
所述主体①的制作材料是聚氯乙烯(PVC),形状为梭形,纵向剖面为倒三角形,宽部朝上,尖部朝下。主体①内部分为两部分,下部是主体工作舱 采用静态密封,用来安置各种仪器设备、数据存储单元和位置计算模块;上部是主体浮力舱 内部有充气气囊,气囊体积大小可以通过充气阀调节,这样控制浮力舱内气囊的体积大小就可以控制整个装置的重心位置,以控制装置在水中的位置。
所述平衡翼②的制作材料是聚氯乙烯(PVC),形状是弧形。平衡翼②焊接在主体①靠近前进方向的前端,方向垂直于水平面,有预定的弧度,可以用来保持该装置在水中的运动方向同时提供装置前进的动力。
所述激光测距仪采用手持激光测距仪的改进。将手持激光测距仪的外壳去掉,分离出仪器主要部分、激光发射器与接收器、主板、LCD显示、电源。将仪器主要部分固定于装置主体①中,静态密封;激光测距仪发射器③与激光测距仪接收器④透过主体①两侧的小孔穿出,激光发射器不断向两侧发射激光,激光照射到河岸后反射,接收器接收反射的激光,小孔位于主体①两侧中部,孔隙处用橡胶密封,防止渗水;主板与装置的计算机芯片连接,实现装置位置的确定和控制;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接。
所述传感器是多参数型水质传感器,从水浅5cm到水深60m,可以现场即刻读出多项水质参数,包括电导率、浊度、PH、溶解氧和温度。传感器主体部分密封于主体工作舱 内,传感器探头⑧透过主体两侧的小孔穿出,小孔位于主体两侧后部,孔隙处用橡胶密封,防止渗水。传感器通过I/O接口与装置计算机芯片和数据存储芯片连接,可以实现水质的自动分析与记录;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接。
所述超声波测深仪是普通超声波测深仪的改进,测量范围是0.5m到100m。将超声波测深仪外壳去掉,主体部分密封于主体工作舱 内,通过I/O接口将其与计算机芯片和数据存储单元连接,实现仪器的自动控制和数据存储。超声波测深仪换能器⑥安装在主体外部底面,向水底发射超声波,并接收反射回来的超声波来确定水底高程。超声波测深仪采用多波束测深技术,该技术属于面测量,可以扫描水下一个面区域,通过改变波束开角来改变对水下的扫描区域范围,大大节约了测量时间,减少了工作量;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏⑨连接。
所述GPS流动站是GPS接收机,即可以作为流动站使用,又可以作为基站使用。GPS流动站主要部分安装在主体工作舱 内,GPS流动站天线⑦位于主体①上部,用防水材料包裹;去除自带的电源和LCD显示屏,将仪器电源和LCD显示屏线路与装置的电源盒LCD显示屏连接。
所述GPS基准站是与GPS流动站相同的GPS接收机,放置于岸上没有成片障碍物的空地,用三脚架撑起,防止信号和通讯受到干扰。通过GPS流动站与GPS基准站配合,使用GPS-RTK技术,就能精确测量该装置的平面坐标。
所述标尺⑩的精度为1mm,量程为200mm,刻在GPS流动站天线⑦包裹材料外部。标尺⑩上刻度代表的意义是从超声波测深仪换能器⑥底部到水面的距离。这样每次测深仪测量的高程加上标尺上与水面齐平的刻度,即可得到校正后的水面高程。
所述的舵⑤是流线型舵,它位于装置主体①尾部,计算机芯片确定装置位置后,将信息转化为电信号,控制位于主体①尾部的舵运动,从而改变装置航线。
所述计算机芯片采用平板电脑芯片,平板电脑芯片的计算能力足以满足本装置的工作要求。计算机芯片用来接收激光测距仪的信号,计算装置在水中的位置,控制舵的运动来改变装置位置;控制传感器、超声波测深仪和GPS流动站的工作;控制LCD显示屏⑨显示数据。
所述数据存储单元采用Flash存储芯片。该数据存储单元用来存储装置每个时间点的空间坐标数据、测量水深数据以及常规水质指标数据,待测量完毕后可以通过RS232接口导出到电脑中进行数据处理分析。
计算机芯片、数据存储单元和I/O接口集成于一片单片机上,单片机静态密封于装置主体工作舱 内。
所述LCD显示屏⑨是字符点阵液晶显示屏,其上显示的数据由装置计算机芯片控制;它安装于主体①上部,用来显示激光测距仪、超声波测深仪、传感器和GPS流动站的数据信息。
所述电池是大容量可充电锂电池组;该电池用来维持激光测距仪、传感器、超声波测深仪、GPS流动站、舵、计算机芯片以及数据存储芯片的正常工作。
系统启动
对电池的电力进行检查,如果电力不足以保证一次测量任务的完成,则充电。之后,打开装置电源,确保GPS流动站、激光测距仪、超声波测深仪、计算机芯片等各部分的指示灯显示正常。将GPS基准站放置于空旷、无成片障碍物的岸上空地,打开GPS地面基准站,确保GPS基准站可以正常工作。
将装置放入水流较平缓的区域中,通过充气阀调节浮力舱内气囊体积大小来调整装置在水中的位置。若装置主体①在水面之上,则放气;若装置标尺⑩及GPS流动站天线⑦不能露出水面,则充气。调整后,使装置处于主体①没入水面以下,只留GPS流动站天线⑦及标尺⑩于水面上的工作状态。
校准
GPS定位系统的校准:将装置移动到空间坐标信息已知的点位上,GPS基准站接收卫星信号,确定自身位置信息,并将自身的观测值与观测坐标一起发送给GPS流动站;GPS流动站接收来自GPS基准站的数据,并进行差分计算,给出定位信息,该点的平面坐标显示在LCD显示屏⑨上。记录下GPS流动站给出的该点的空间坐标,并与该点已知空间坐标进行比较,校准定位系统至误差允许的范围内。
超声波测深仪的校准:将装置移动到水深已知的区域上,调整超声波测深仪换能器⑥波束开角的角度,超声波测深仪向水底发射超声波波束,之后接收水底反射回的超声波波束,通过超声波在水中传播的速度和发射与接收超声波波束的时间间隔来计算该区域的水深,水深显示在LCD显示屏⑨上。记录下该区域的水深信息,并与该区域已知水深进行比较,校准定位系统至误差允许的范围内。
激光测距仪的校准:将装置移动到距河岸距离已知的点位上,激光测距仪向河岸发射激光,激光照射到河岸后反射回来,激光测距仪接收器④接收河岸反射回来的激光,通过激光在水中传播的速度和发射与接收激光光束的时间间隔来计算该点距离河岸的距离,该距离显示在LCD显示屏⑨上。记录下该点距河岸的距离,并与该点已知距河岸距离进行比较,校准定位系统至误差允许的范围内。
测量
将装置放入水中,装置自动向河道中线靠拢,待装置到达河道中线后,开始测量工作。测量过程中,实际水深是测量水深加上标尺水深之和。待装置沿河道中心线走完要测路程后,用网回收装置,将数据存储单元内的数据输出到电脑中,利用专业软件进行水下地形图的绘制和水质分析。
一种适用于激流环境下的水下地形自动探测装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0