








专利摘要
公开了自供电的转轴振动主动控制系统及主动控制方法,自供电的转轴振动主动控制系统中,内壳体固定连接转轴,第一端盖可转动连接内壳体,第二端盖可转动连接内壳体,外壳体固定连接第一端盖和第二端盖,永磁体固定连接外壳体,线圈架固定安装于内壳体,励磁线圈缠绕于线圈架与永磁体产生相对运动以产生电能,加速度传感器固定连转轴以实时测量转轴的振动信号,弹性元件固定连接转轴,作动器固定连接弹性元件使得施加的作用力经由弹性元件作用于转轴,控制器电连接励磁线圈和加速度传感器,其中,响应于振动信号,控制器分析处理振动信号以形成控制信号,响应于控制信号,作动器施加作用力经由弹性元件作用于转轴以主动控制转轴的径向振动。
权利要求
1.一种自供电的转轴振动主动控制系统,其包括,
内壳体,其固定连接转轴,
第一端盖,其可转动连接内壳体,
第二端盖,其可转动连接内壳体,
外壳体,其固定连接第一端盖和第二端盖,
永磁体,其固定连接所述外壳体,第一滚动轴承和第二滚动轴承的外端分别通过第一端盖和第二端盖固定,第一滚动轴承的内侧通过内壳体的轴肩固定,第二滚动轴承的内侧通过轴承固定轴套固定于内壳体,永磁体经由第一端盖和外壳体夹紧,
线圈架,其固定安装于所述内壳体,
励磁线圈,其缠绕于所述线圈架与所述永磁体产生相对运动以产生电能,
加速度传感器,其固定连接所述转轴以实时测量所述转轴的振动信号,
弹性元件,其固定连接所述转轴,
作动器,其固定连接所述弹性元件使得施加的作用力经由弹性元件作用于转轴,
控制器,其电连接励磁线圈和加速度传感器,其中,
响应于所述振动信号,控制器分析处理振动信号以形成控制信号,
响应于所述控制信号,作动器施加作用力经由弹性元件作用于转轴以主动控制转轴的径向振动;
其中,所述主动控制系统还包括,
作动器盖板,其设在所述作动器上,
预紧螺栓,其设在所述作动器盖板以调节所述弹性元件的预紧力。
2.如权利要求1所述的自供电的转轴振动主动控制系统,其中,所述主动控制系统还包括,
功率放大器,其电连接于所述控制器以放大所述控制信号,
风扇,其固定在内壳体上,
进气口,其设在所述第二端盖上,
出气口,其设在所述第一端盖上。
3.如权利要求1所述的自供电的转轴振动主动控制系统,其中,作动器包括六个压电叠层作动器,其在圆周方向上的夹角为60°。
4.如权利要求1所述的自供电的转轴振动主动控制系统,其中,所述加速度传感器包括压电式加速度传感器,所述弹性元件包括叠层弹簧,所述作动器包括压电叠层作动器。
5.如权利要求1所述的自供电的转轴振动主动控制系统,其中,加速度传感器包括安装在内壳体表面上靠近第一滚动轴承的位置处的第一加速度传感器和第二加速度传感器,两个加速度传感器在圆周方向上呈90°夹角。
6.如权利要求1所述的自供电的转轴振动主动控制系统,其中,加速度传感器和作动器均安装在转轴上随转轴一同旋转。
7.如权利要求1所述的自供电的转轴振动主动控制系统,其中,所述控制器对比转轴振动主动控制前后的波形图以修正控制信号。
8.一种权利要求1-7中任一项所述自供电的转轴振动主动控制系统的主动控制方法,其包括以下步骤,
励磁线圈与所述永磁体产生相对运动以提供电能到控制器,
固定连接待主动控制转轴上的加速度传感器实时测量所述转轴的振动信号,
响应于所述振动信号,控制器分析处理振动信号以形成控制信号,响应于所述控制信号,作动器施加作用力经由弹性元件作用于转轴以主动控制转轴的径向振动。
说明书
技术领域
本发明涉及主动控制技术领域,特别是一种自供电的转轴振动主动控制系统及主动控制方法。
背景技术
随着科学技术的迅猛发展,机械工业化的程度也飞速提高,现代工业生产的机械设备正逐步走向复杂化、高速化、自动化。精密的工业生产过程越来越依赖于电机和相关机械设备高效可靠、安全平稳的运作。机械振动对于大多数的工业机械/工程结构及仪器仪表是有害的,它常常是造成机械和结构恶性破坏和失效的直接原因,例如1940年美国的Tacoma Narrows吊桥在中速风载下,因卡门漩涡引起桥身扭转振动和上下振动而坍塌。1972年日本海南电厂的一台66万千瓦汽轮发电机组,在试车中因发生异常振动而全机毁坏,长达51米的主轴断裂飞散,联轴节及汽轮机叶片穿透厂房飞落至百米之外。
旋转机械是电力工业重要的组成部分,转子系统是其关键部件。为了防止旋转机械由振动而产生的疲劳、噪声和故障等问题,需要对转子系统的振动进行控制,实际上在各类旋转机械的转子系统上都采用了各种各样的被动抑振措施。随着现代旋转机械参数的不断提高,生产上对降低转子系统的振动,提高机组稳定性的要求与日俱增。通常人们采用诸如改进设计水平、提高制造精度及吸振隔振等手段来抑制转子的振动,实践证明收效有限,振动事故仍层出不穷,造成巨大的经济损失,因此振动主动控制技术日益收到关注和重视。随着计算机、控制理论和电子技术的发展,振动主动控制技术发展迅速,应用日广,振动主动控制较被动控制精度更高,控制更灵活,减振效果更好、适应性更强、低频控制效果好。
目前关于转子系统振动主动控制方法的研究研究时间较短,相关成果较少,且大部分的的研究多偏重于理论研究,对这种控制系统的物理实现技术研究较少,目前常见的转轴振动主动控制物理实现技术主要是将传感器安装在固定转轴的支撑件上,通过将检测到的支撑件振动信号输送给控制器,控制器对转轴的振动数据进行分析处理产生控制信号,传递给作动器产生作动力,来控制转轴的振动,这种方式虽然能够在一定程度上实现转轴振动的主动控制,但是由于是一种间接测量控制的方式,时滞较大,控制效果不是很好,测量精度受支撑件刚度的影响较大,且系统结构复杂,拆装困难,成本高,实用性较差,适用范围较窄。
在背景技术部分中公开的上述信息仅仅用于增强对本发明背景的理解,因此可能包含不构成本领域普通技术人员公知的现有技术的信息。
发明内容
为了上述问题,本发明提供了自供电的转轴振动主动控制系统及主动控制方法,整个系统可根据实际需要选择较为合适的安装方式,安装和拆卸方便,直接安装在转轴上即可发挥作用,对转轴振动信号的检测和处理速度快,抑制效果好,能有效解决传统的转轴振动主动控制系统中存在的设备安装复杂,需要外部电源供电,布线困难,信号检测误差大,处理时间长,时滞大,振动抑制效果差等问题,能够很好的实现转轴径向振动的主动控制。本发明的目的是通过以下技术方案予以实现。
一种自供电的转轴振动主动控制系统包括,
内壳体,其固定连接转轴,
第一端盖,其可转动连接内壳体,
第二端盖,其可转动连接内壳体,
外壳体,其固定连接第一端盖和第二端盖,
永磁体,其固定连接所述外壳体,
线圈架,其固定安装于所述内壳体,
励磁线圈,其缠绕于所述线圈架与所述永磁体产生相对运动以产生电能,
加速度传感器,其固定连所述转轴以实时测量所述转轴的振动信号,
弹性元件,其固定连接所述转轴,
作动器,其固定连接所述弹性元件使得施加的作用力经由弹性元件作用于转轴,
控制器,其电连接励磁线圈和加速度传感器,其中,
响应于所述振动信号,控制器分析处理振动信号以形成控制信号,
响应于所述控制信号,作动器施加作用力经由弹性元件作用于转轴以主动控制转轴的径向振动。
所述的自供电的转轴振动主动控制系统中,第一轴承和第二轴承的外端分别通过第一端盖和第二端盖固定,第一轴承的内侧通过内壳体的轴肩固定,第二轴承的内侧通过轴承固定轴套固定于内壳体,永磁体经由第一端盖和外壳体夹紧。
所述的自供电的转轴振动主动控制系统中,所述主动控制系统还包括,
作动器盖板,其设在所述作动器上,
预紧螺栓,其设在所述作动器盖板以调节所述弹性元件的预紧力。
所述的自供电的转轴振动主动控制系统中,所述主动控制系统还包括,
功率放大器,其电连接于所述控制器以放大所述控制信号,
风扇,其固定在内壳体上,
进气口,其设在所述第二端盖上,
出气口,其设在所述第一端盖上。
所述的自供电的转轴振动主动控制系统中,作动器包括六个压电叠层作动器,其在圆周方向上的夹角为60°。
所述的自供电的转轴振动主动控制系统中,所述加速度传感器包括压电式加速度传感器,所述弹性元件包括叠层弹簧,所述作动器包括压电叠层作动器。
所述的自供电的转轴振动主动控制系统中,加速度传感器包括安装在内壳体表面上靠近第一滚动轴承的位置处的第一加速度传感器和第二加速度传感器,两个传感器在圆周方向上呈90°夹角。
所述的自供电的转轴振动主动控制系统中,传感器和作动器均安装在转轴上随转轴一同旋转。
所述的自供电的转轴振动主动控制系统中,所述控制器对比转轴振动主动控制前后的波形图以修正控制信号。
根据本发明另一方面,一种所述自供电的转轴振动主动控制系统的主动控制方法包括以下步骤,
励磁线圈与所述永磁体产生相对运动以提供电能到控制器,
固定连接待主动控制转轴上的加速度传感器实时测量所述转轴的振动信号,
响应于所述振动信号,控制器分析处理振动信号以形成控制信号,响应于所述控制信号,作动器施加作用力经由弹性元件作用于转轴以主动控制转轴的径向振动。
与现有技术相比,本发明的有益效果是:
整个系统结构简单,安装和拆卸方便,工作可靠,实用性好,适用范围广;转轴开始旋转,本发明的一种自供电集成式轴系径向振动主动控制系统便开始工作,消除转轴径向振动;整个转轴径向振动主动控制系统均随转轴同步转动,振动信号测量误差小,测量结果准确,控制器处理耗时短,执行器响应速度快,控制系统时滞小,能较好的实现转轴径向振动的主动控制。
上述说明仅是本发明技术方案的概述,为了能够使得本发明的技术手段更加清楚明白,达到本领域技术人员可依照说明书的内容予以实施的程度,并且为了能够让本发明的上述和其它目的、特征和优点能够更明显易懂,下面以本发明的具体实施方式进行举例说明。
附图说明
通过阅读下文优选的具体实施方式中的详细描述,本发明各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。说明书附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。显而易见地,下面描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。而且在整个附图中,用相同的附图标记表示相同的部件。
在附图中:
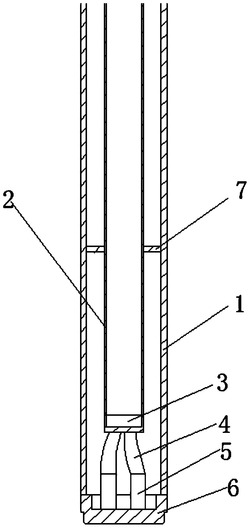
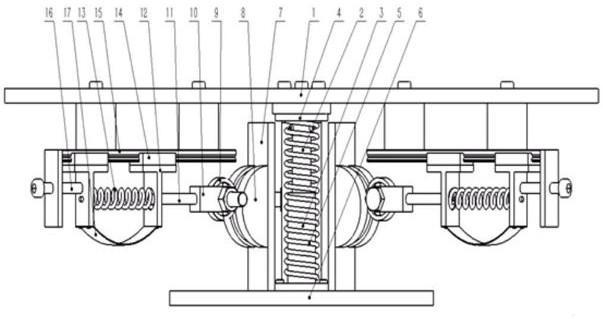
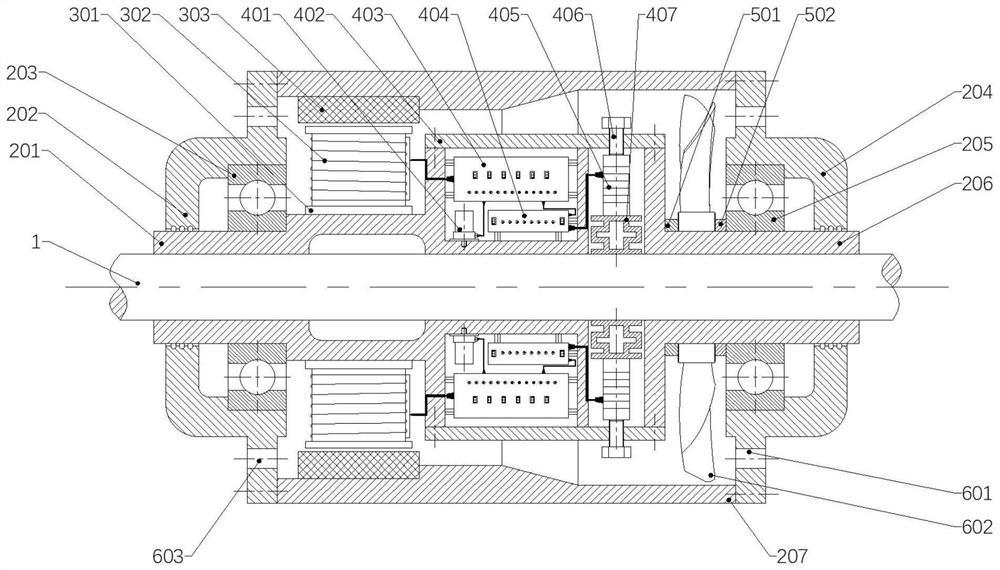
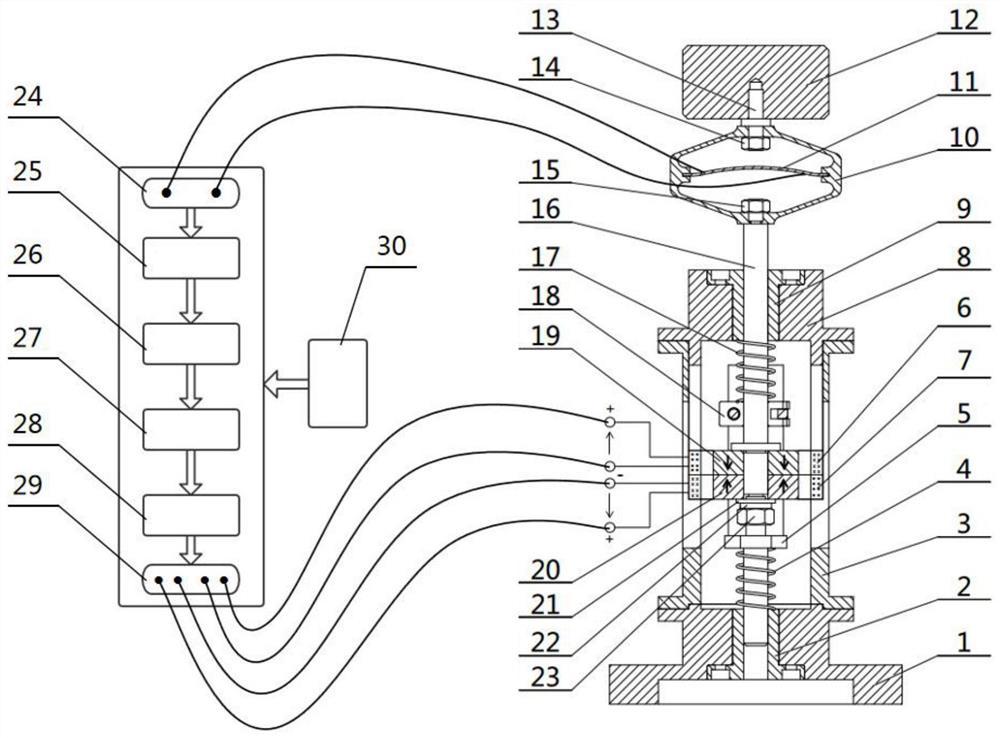
图1是根据本发明一个实施例的自供电的转轴振动主动控制系统的结构示意图;
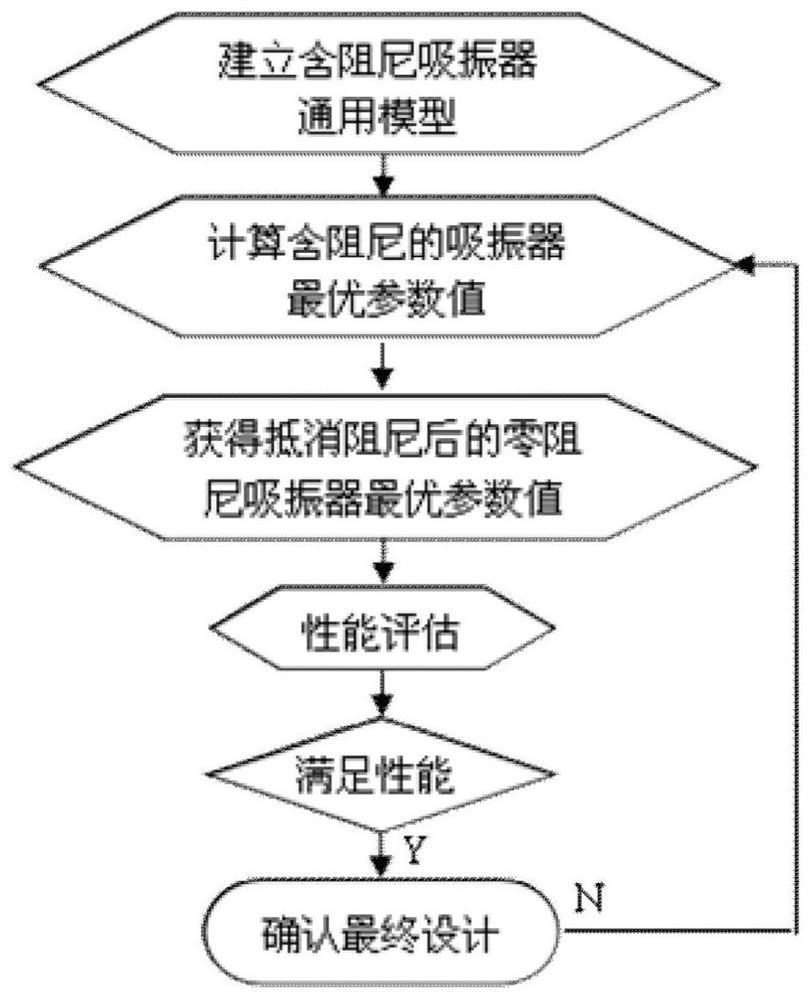
图2根据本发明一个实施例的主动控制方法的步骤示意图。
以下结合附图和实施例对本发明作进一步的解释。
具体实施方式
下面将参照附图1至图2更详细地描述本发明的具体实施例。虽然附图中显示了本发明的具体实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名词的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本发明的较佳实施方式,然所述描述乃以说明书的一般原则为目的,并非用以限定本发明的范围。本发明的保护范围当视所附权利要求所界定者为准。
为便于对本发明实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明,且各个附图并不构成对本发明实施例的限定。
为了更好地理解,如图1所示,一种自供电的转轴振动主动控制系统包括,
内壳体201,其固定连接转轴1,
第一端盖202,其可转动连接内壳体201,
第二端盖204,其可转动连接内壳体201,
外壳体207,其固定连接第一端盖202和第二端盖204,
永磁体303,其固定连接所述外壳体207,
线圈架301,其固定安装于所述内壳体201,
励磁线圈302,其缠绕于所述线圈架301与所述永磁体303产生相对运动以产生电能,
加速度传感器401,其固定连所述转轴1以实时测量所述转轴1的振动信号,
弹性元件407,其固定连接所述转轴1,
作动器405,其固定连接所述弹性元件407使得施加的作用力经由弹性元件407作用于转轴1,
控制器403,其电连接励磁线圈302,其中,
响应于所述振动信号,控制器403分析处理振动信号以形成控制信号,
响应于所述控制信号,作动器405施加作用力经由弹性元件407作用于转轴1以主动控制转轴1的径向振动。
所述的自供电的转轴振动主动控制系统的优选实施方式中,第一轴承和第二轴承的外端分别通过第一端盖202和第二端盖204固定,第一轴承的内侧通过内壳体201的轴肩固定,第二轴承的内侧通过轴承固定轴套固定于内壳体201,永磁体303经由第一端盖202和外壳体207夹紧。
所述的自供电的转轴振动主动控制系统的优选实施方式中,所述主动控制系统还包括,
作动器盖板,其设在所述作动器405上,
预紧螺栓406,其设在所述作动器盖板以调节所述弹性元件407的预紧力。
所述的自供电的转轴振动主动控制系统的优选实施方式中,所述主动控制系统还包括,
功率放大器404,其电连接于所述控制器403以放大所述控制信号,
风扇602,其固定在内壳体201上,
进气口601,其设在所述第二端盖204上,
出气口603,其设在所述第一端盖202上。
所述的自供电的转轴振动主动控制系统的优选实施方式中,作动器405包括六个压电叠层作动器405,其在圆周方向上的夹角为60°。
所述的自供电的转轴振动主动控制系统的优选实施方式中,所述加速度传感器401包括压电式加速度传感器401,所述弹性元件407包括叠层弹簧,所述作动器405包括压电叠层作动器405。
所述的自供电的转轴振动主动控制系统的优选实施方式中,加速度传感器401包括安装在内壳体201表面上靠近第一滚动轴承203的位置处的第一加速度传感器401和第二加速度传感器401,两个传感器在圆周方向上呈90°夹角。
所述的自供电的转轴振动主动控制系统的优选实施方式中,传感器和作动器405均安装在转轴1上随转轴1一同旋转。
所述的自供电的转轴振动主动控制系统的优选实施方式中,所述控制器403对比转轴振动主动控制前后的波形图以修正控制信号。
所述的自供电的转轴振动主动控制系统的优选实施方式中,用于定位的第一套筒501和第二套筒502设置在内壳体201和外壳体207之间。
为了进一步理解本发明,在一个实施例中,一种自供电集成式轴系径向振动主动控制系统由转轴1壳体部分,电源组件,振动主动控制组件,散热部分和若干联接固定件组成。壳体部分主要由第一端盖202,外壳体207,第一滚动轴承203,内壳体201,第二内壳体206,第二端盖204,第二滚动轴承205等组成,用以安装和固定系统的其他部分。内壳体201、第二内壳体206可以通过键和螺栓或者过盈配合等方式联接固定在转轴1上,随转轴1一起做同步转动;外壳体207的一端与内壳体201之间装有第一滚动轴承203,另一端与第二内壳体206之间装有第二滚动轴承205,用以实现外壳体204与内壳体201、第二内壳体206间的相对运动;第一滚动轴承203和第二滚动轴承205均采用两端单向固定的结构形式安装,轴承外端通过第一端盖202和第二端盖204固定,第一滚动轴承203内侧通过内壳体201上的轴肩进行固定,第二滚动轴承205内侧通过轴承固定轴套502固定;电源组件主要由永磁体303和励磁线圈302组成,利用电磁感应原理产生电能,给整个系统供电。永磁体303通过第一端盖202和外壳体207实现定位和夹紧,线圈架301安装并固定在内壳体201上,励磁线圈302缠绕在线圈架301上。转轴1转动过程中,励磁线圈302与永磁体303产生相对运动,切割磁感线产生电能;振动主动控制组件主要由振动主动控制组件壳体402,压电式加速度传感器401,控制器403,功率放大器404,叠层弹簧407,压电叠层作动器405,预紧螺钉406等几部分组成,随转轴1一起转动,压电式加速度传感器401检测转轴1的振动,并将振动信号传至控制器403,控制器403对传入的振动信号进行快速处理,并将其转化为控制信号输出至功率放大器404,经功率放大器404放大后输出至压电叠层作动器405,压电叠层作动器405产生作动力,从而抑制转轴1的径向振动,使转轴1转动趋向平稳;联接固定件主要由套筒1501、套筒2502和一些螺栓联接件组成,主要用来实现系统中一些部件的定位和固定等;散热部分主要由进气孔601,风扇602和散热孔603等组成,风扇602通过键和螺栓等安装在内壳体201上,转轴1旋转过程中,风扇602随转轴1一起旋转,将由进气口601进入的冷空气经系统内部送至散热孔603,通过散热孔将系统内部的热空气排出到系统外,实现系统的散热。
在一个实施例中,振动主动控制组件均安装在转轴1上,并随转轴1做同步转动,转轴1振动信号的检测和处理过程时滞小,系统响应快,能更好的实现转轴1振动的主动控制。
在一个实施例中,整个系统所需的电能由系统内部产生,为振动主动控制部件安装在转轴1上,快速对转轴1的振动作出反应提供了一种实现途径,使整个系统结构得以大大简化,避免了在运动部件和静止部件间布线难的问题,且有利于能源的高效利用,作用效果显著。
在一个实施例中,振动主动控制系统组件中的压电式加速度传感器401共有两个,安装在系统内壳体201上靠近第一滚动轴承203的位置,在圆周方向上成90°排列,随转轴1做同步转动,用于实时检测转轴1的径向振动,并将振动信号快速的传递至控制器403。
在一个实施例中,振动主动控制组件的压电叠层作动器405有四个,直接安装在转轴1上,径向成90°排列;在压电叠层作动器405的外侧设置有预紧螺钉406,用于固定压电叠层作动器405并对其施加一定的预紧力;在压电叠层作动器405的外侧设置有环形叠层弹簧407,用于将作动器产生的作动力传递至转轴1。
在一个实施例中,压电式加速度传感器401安装在系统内壳体201上靠近第一滚动轴承203的位置,该处检测到的转轴1振动信号干扰因素少,测量效果较好。
在一个实施例中,压电叠层作动器405安装在叠层弹簧407上,叠层弹簧407直接安装在转轴1上,压电叠层作动器405产生的作动力可以通过叠层弹簧407直接作用于转轴1,用以快速高效的实现转轴1的振动主动控制。
在一个实施例中,整个系统是直接套装在转轴1上的,安装拆卸方便,适应性强,作用效果好。
在一个实施例中,电源部分主要由线圈架301,永磁体303和励磁线圈302组成,利用电磁感应原理为整个系统提供电能,且由于永磁体303和励磁线圈302在产生电能的同时均受到来自对方的安培力作用,虽然会在一定程度上削弱其相对运动趋势,但同时也会在一定程度上削弱甚至消除转轴的扭转振动。
优选的,所述的一种自供电集成式轴系径向振动主动控制系统可根据具体工作需要,通过螺栓联接、过盈配合、焊接、铆接或其他方式直接安装在转轴1上即可使用。
所述的壳体部分主要由第一端盖202,外壳体207,第一滚动轴承203,内壳体201,第二内壳体206,第二端盖204,第二滚动轴承205等组成,是整个系统的骨架部分,用以安装和固定系统的其他部分。
优选的,所述壳体部分的内壳体201、第二内壳体206均采用紧配合的方式联接固定在所述转轴1上,随转轴1同步转动。
优选的,所述壳体部分的外壳体207一端与内壳体201之间装有第一滚动轴承203,另一端与第二内壳体206之间装有第二滚动轴承205,用以实现外壳体207与内壳体201、第二内壳体206间的相对运动;第一滚动轴承203和第二滚动轴承205均采用两端单向固定的结构形式安装,轴承外端通过第一端盖202和第二端盖204固定,第一滚动轴承203内侧通过内壳体201上的轴肩进行固定,第二滚动轴承205内侧通过轴承固定轴套固定。
优选的,所述电源组件主要由永磁体303和励磁线圈302组成,利用电磁感应原理产生电能,给整个系统供电。所述电源组件的永磁体303通过第一端盖202和外壳体207实现定位和夹紧,线圈架301安装并固定在内壳体201上,励磁线圈302缠绕在线圈架301上。转轴1转动过程中,励磁线圈302与永磁体303产生相对运动,切割磁感线产生电能。
优选的,所述振动主动控制组件主要由振动主动控制组件壳体402,压电式加速度传感器401,控制器403,功率放大器404,叠层弹簧407,压电叠层作动器405,预紧螺钉等几部分组成,随转轴1一起转动,压电式加速度传感器401检测转轴1的振动,并将振动信号传至控制器403,控制器403对传入的振动信号进行快速处理,并将其转化为控制信号输出至功率放大器404,经功率放大器404放大后输出至压电叠层作动器405,压电叠层作动器405产生作动力,从而抑制转轴1的径向振动,使转轴1转动趋向平稳。
所述的散热部分主要由进气孔601,风扇602和散热孔603等组成,所述散热部分的风扇602通过键和螺栓等安装在内壳体201上,转轴1旋转过程中,风扇602随转轴1一起旋转,将由进气口601进入的冷空气经系统内部送至散热孔603,通过散热孔603将系统内部的热空气排出到系统外,实现系统的散热。
所述的一种自供电集成式轴系径向振动主动控制系统,其工作过程及原理如下:
将所述的一种自供电的转轴振动主动控制系统直接安装在转轴1上,具体安装方式可根据实际情况进行选择,如螺纹联接、过盈配合联接、焊接、铆接等方式;
转轴1转动过程中,所述的一种自供电的转轴振动主动控制系统中的压电式加速度传感器401检测转轴1的径向振动,并将振动信号传递至控制器403,控制器403对振动信号进行分析处理生成控制信号,经功率放大器404的放大作用传递至压电叠层作动器405,对转轴1的径向振动做出反馈,以减小甚至消除转轴1振动。
优选的,所述自供电的转轴振动主动控制系统内部有电源组件,无需外部供电,可直接将转轴1转动过程中由于振动产生的机械能转化为电能,为振动主动控制系统供电,可以节约能源,避免了在运动部件和静止部件间布线引发的各种问题,且由于电流的磁效应,可以在一定程度上削弱转轴1转动过程中的扭振现象;
优选的,所述振动主动控制组件中的压电式加速度传感器401共有两个,安装在所述壳体部分的内壳体201上,径向成90°排列,用于检测转轴1的径向振动,并将检测到的振动信号传递至控制器403;
优选的,所述振动主动控制组件中的压电叠层作动器405共有6个,在叠层弹簧上均匀分布,用以接收控制器403经功率放大器404传来的控制信号,对转轴1的径向振动进行反馈;
进一步优选的,所述轴系径向振动主动控制系统的压电式加速度传感器401,控制器403,功率放大器404,压电叠层作动器405均直接安装在转轴1上,随转轴1一同旋转,信号传输过程中时滞小,传输速度快,响应快,控制效果好;
优选的,所述散热部分风扇602直接安装在转轴1上,无需外接电源,主要用于对转轴1径向振动主动控制系统中的发热部件及时散热,结构简单,散热效果好。
如图2所示,一种所述自供电的转轴振动主动控制系统的主动控制方法包括以下步骤,
励磁线圈302与所述永磁体303产生相对运动以提供电能到控制器403,
固定连接待主动控制转轴1上的加速度传感器401实时测量所述转轴1的振动信号,
响应于所述振动信号,控制器403分析处理振动信号以形成控制信号,响应于所述控制信号,作动器405施加作用力经由弹性元件407作用于转轴1以主动控制转轴1的径向振动。
在一个优选实施方式中,方法包括:
S1、将所述的一种自供电集成式轴系径向振动主动控制系统安装在转轴1上,具体安装方式可根据实际需要进行设计;
S2、转轴1转动过程中,安装在所述内壳体201表面上的所述振动主动控制组件的压电式加速度传感器401检测转轴1的径向振动,产生振动信号,并将振动信号传至控制器403;
S3、所述控制器403对传来的振动信号进行分析处理,产生控制信号,并经功率放大器404的放大作用进行信号放大;
S4、放大后的信号传递至压电叠层作动器405,作动器405根据控制器403传来的控制信号产生作动力,以减小甚至消除转轴1的径向振动;
S5、在转轴1旋转过程中,所述电源组件中的励磁线圈302切割磁感线产生电能,为系统中的耗能元件供电;
S6、在转轴1旋转过程中,所述散热部分中的风扇602随转轴1做同步转动,产生风力加快系统内部的空气流通,为系统中的发热元件降温,以延长系统的工作时间和零件使用寿命。
重复S1-S6的步骤,即可实现转轴1径向振动的主动控制,并可在一定程度上削弱转轴1的扭转振动,本发明的压电式加速度传感器401可实时采集转轴1的径向振动信号,并将信号快速传递至控制器403进行分析处理,产生控制信号,经功率放大器404的放大作用传递至作动器405,以减小甚至消除转轴1的径向振动,由于电源组件,振动主动控制组件均随转轴1做同步转动,因此系统时滞小,响应快,控制效果好。
工业实用性
本发明所述的自供电的转轴振动主动控制系统及主动控制方法可以在振动控制领域制造并使用。
以上结合具体实施例描述了本申请的基本原理,但是,需要指出的是,在本申请中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本申请的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用,而非限制,上述细节并不限制本申请为必须采用上述具体的细节来实现。
为了例示和描述的目的已经给出了以上描述。此外,此描述不意图将本申请的实施例限制到在此公开的形式。尽管以上已经讨论了多个示例方面和实施例,但是本领域技术人员将认识到其某些变型、修改、改变、添加和子组合。
自供电的转轴振动主动控制系统及主动控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0