

IPC分类号 : B64C27/52I,B64C27/22I,B64C19/00I,G05B13/04I





专利摘要
本发明公开了一种分布式动力倾转旋翼无人机及其控制方法。该分布式动力倾转旋翼无人机包括设置在机翼上的第一旋翼系统和设置在V形尾翼处的第二旋翼系统;第一旋翼系统包含4个倾转旋翼,这4个倾转旋翼两两设置在左侧机翼和右侧机翼上;第二旋翼系统包含2个旋翼,这2个旋翼分别设置在V形机翼的两侧。该无人机的控制方法包括旋翼模态控制律、固定翼模态控制律以及过渡模态的控制策略。本发明既能实现动力系统的最优功率匹配,又能为旋翼机各状态提供鲁棒可靠的控制。
权利要求
1.基于分布式动力倾转旋翼无人机的控制方法,所述分布式动力倾转旋翼无人机包括机身、机翼和V形尾翼,其特征在于:还包括设置在机翼上的第一旋翼系统和设置在V形尾翼处的第二旋翼系统;所述第一旋翼系统包含4个倾转旋翼,这4个倾转旋翼两两设置在左侧机翼和右侧机翼上;所述第二旋翼系统包含2个旋翼,这2个旋翼分别设置在V形机翼的两侧;
其特征在于,包括以下控制律:
(1)旋翼模态控制律:
采用两级PID控制,首先根据期望的滚转角
上式中,p
根据期望角速度(p
上式中,Δδ
(2)固定翼模态控制律:
包括纵向通道控制律和横向通道控制律,其中纵向通道控制律:
上式中,δ
α为积分项的开关系数:
其中,ΔH(k)为当前时刻t的ΔH值,ε为设定的高度差判断阈值;
横向通道控制律:
当侧偏距D>M时:
δ
当侧偏距D≤M时:
其中,δ
2.根据权利要求1所述控制方法,其特征在于,在倾转过程中需要随时在旋翼模态和固定翼模态进行切换,包括从旋翼模态向固定翼模态转换的过渡模态和从固定翼模态向旋转翼模态转换的过渡模态,过渡模态的控制策略如下:
旋翼操纵系统与固定翼操纵系统同时起作用,控制权重随空速的平方交替变化,直到完全转换到某一模态。
3.根据权利要求2所述控制方法,其特征在于,从旋翼模态向固定翼模态转换的过渡模态的过程分为2步:
第1步:两侧机翼上最外侧的两个倾转旋翼向前倾转,在倾转过程中,旋翼和固定翼采用混控方式,控制权重随空速的平方变化,空速越大,固定翼控制权重越高,此阶段的旋翼控制采用六旋翼控制;当最外侧两个倾转旋翼倾转完成并且空速达到V
第2步:当无人机到达设定的安全速度和高度,中间两个倾转旋翼向前倾转,控制权重继续随前飞空速的平方变化,当倾转过程时间大于T
4.根据权利要求3所述控制方法,其特征在于,在旋翼模态向固定翼模态转换过程中,如果模式切回到旋翼模态,则所有倾转旋翼迅速回倾,旋翼控制调用六旋翼控制,旋翼模态权重设置为100%。
5.根据权利要求2所述控制方法,其特征在于,从固定翼模态向旋翼模态转换的过渡模态的过程分为2步:
第1步:两侧机翼上最外侧的两个倾转旋翼向后倾转,此时固定翼和旋翼采用混控方式,控制权重随空速的平方变化,空速越小,旋翼控制权重越高,当倾转完成时并且空速达到V
第2步:中间两个倾转旋翼向后倾转,直到倾转完成,调用六旋翼控制。
6.根据权利要求5所述控制方法,其特征在于,在固定翼模态向旋翼模态转换过程中,若模式切回到固定翼模态,则所有倾转旋翼迅速前倾,迅速回到固定翼模态,固定翼模态权重设置为100%。
7.根据权利要求1所述控制方法,其特征在于:第一旋翼系统中各倾转旋翼的旋转轴与无人机的重心轴重合,在倾转过程中,无人机的重心近似不变。
8.根据权利要求1所述控制方法,其特征在于:每个倾转旋翼具有限位装置,从而将倾转旋翼的倾转角度限制在0~90°范围内。
9.根据权利要求1所述控制方法,其特征在于:第二旋翼系统中的旋翼的螺旋桨采用变距螺旋桨。
说明书
技术领域
本发明属于无人机技术领域,特别涉及了一种倾转旋翼无人机。
背景技术
倾转旋翼飞机既能像直升机那样垂直起降、空中悬停,又能像固定翼一样快速固定翼飞行,具有效率高、速度快、航程远的特点。因此倾转旋翼机具有广泛的运用前景。
倾转旋翼机一直是国内外研究的热点,面临气动特性复杂,难于控制等技术难题:垂直起飞与固定翼飞行模式下发动机功率需求差距很大,难于实现最优功率匹配;同时,同步倾转造成的气动不稳定也使旋翼机难以控制。
因此,本领域仍然需要研究新的结构简单的倾转旋翼飞行器,且能为旋翼机各状态的控制提供可靠的解决方法。
发明内容
为了解决上述背景技术提出的技术问题,本发明旨在提出了一种分布式动力倾转旋翼无人机及其控制方法。
为了实现上述技术目的,本发明的技术方案为:
一种分布式动力倾转旋翼无人机,包括机身、机翼和V形尾翼,还包括设置在机翼上的第一旋翼系统和设置在V形尾翼处的第二旋翼系统;所述第一旋翼系统包含4个倾转旋翼,这4个倾转旋翼两两设置在左侧机翼和右侧机翼上;所述第二旋翼系统包含2个旋翼,这2个旋翼分别设置在V形机翼的两侧。
进一步地,第一旋翼系统中各倾转旋翼的旋转轴与无人机的重心轴重合,在倾转过程中,无人机的重心近似不变。
进一步地,每个倾转旋翼具有限位装置,从而将倾转旋翼的倾转角度限制在0~90°范围内。
进一步地,第二旋翼系统中的旋翼的螺旋桨采用变距螺旋桨。
基于上述分布式动力倾转旋翼无人机的控制方法,包括以下控制律:
(1)旋翼模态控制律:
采用两级PID控制,首先根据期望的滚转角 俯仰角θd、偏航角ψd与实际的滚转角 俯仰角θ、偏航角ψ的误差量,构造第一级PID控制,即姿态角闭环控制律:
上式中,pd、qd、rd为期望滚转角速度、期望俯仰角速度和期望偏航角速度; eθ=θd-θ,eψ=ψd-ψ; kθp、kψp是滚转角、俯仰角和偏航角误差的比例参数;
根据期望角速度(pd,qd,rd)与实际角速度(p,q,r)的误差量,构造第二级PID控制,即姿态角速度闭环控制律:
上式中,Δδp、Δδq、Δδr是三个姿态角速度的PID输出;ep=pd-p,eq=qd-q,er=rd-r;kpp、kqp、krp是三个姿态角速度的比例参数;kpd、kqd、krd是三个姿态角速度的微分参数;
(2)固定翼模态控制律:
包括纵向通道控制律和横向通道控制律,其中纵向通道控制律:
上式中,δe为升降舵输出控制量;ΔH=Hc-H,Hc为高度指令,H为实际高度;KHp为高度环比例环节系数,KHi为高度环积分环节系数; 为角速率环的比例环节系数,Kωy角速率环的微分环节系数; 为俯仰角,ωy为俯仰角速率;T为采样周期,k为采样周期数;
α为积分项的开关系数:
其中,ΔH(t)为当前时刻t的ΔH值,ε为设定的高度差判断阈值;
横向通道控制律:
当侧偏距D>M时:
δa=KD1·D+Kψ·Δψ+Kωx·ωx
当侧偏距D≤M时:
其中,δa为副翼输出控制量、δr为方向舵输出控制量;ωx、ωz分别为滚转角速度、偏航角速度;Δψ=ψd-ψ;β为积分项的开关系数;KD1、KD2分别为分段处理时的侧偏距比例系数;Kψ、Kγ为角速率环的比例环节系数;Kωz、Kωx角速率环的微分环节系数;M为设定的侧偏距阈值。
进一步地,在倾转过程中需要随时在旋翼模态和固定翼模态进行切换,包括从旋翼模态向固定翼模态转换的过渡模态和从固定翼模态向旋转翼模态转换的过渡模态,过渡模态的控制策略如下:
旋翼操纵系统与固定翼操纵系统同时起作用,控制权重随空速的平方交替变化,直到完全转换到某一模态。
进一步地,从旋翼模态向固定翼模态转换的过渡模态的过程分为2步:
第1步:两侧机翼上最外侧的两个倾转旋翼向前倾转,在倾转过程中,旋翼和固定翼采用混控方式,控制权重随空速的平方变化,空速越大,固定翼控制权重越高,此阶段的旋翼控制采用六旋翼控制;当最外侧两个倾转旋翼倾转完成并且空速达到V1,旋翼控制采用四旋翼模式控制,并且让最外侧两个倾转旋翼加速来提供前向速度和航向控制;
第2步:当无人机到达设定的安全速度和高度,中间两个倾转旋翼向前倾转,控制权重继续随前飞空速的平方变化,当倾转过程时间大于T1并且速度达到V2,则认为倾转完成。
进一步地,在旋翼模态向固定翼模态转换过程中,如果模式切回到旋翼模态,则所有倾转旋翼迅速回倾,旋翼控制调用六旋翼控制,旋翼模态权重设置为100%。
进一步地,从固定翼模态向旋翼模态转换的过渡模态的过程分为2步:
第1步:两侧机翼上最外侧的两个倾转旋翼向后倾转,此时固定翼和旋翼采用混控方式,控制权重随空速的平方变化,空速越小,旋翼控制权重越高,当倾转完成时并且空速达到V1,旋翼调用四旋翼控制;
第2步:中间两个倾转旋翼向后倾转,直到倾转完成,调用六旋翼控制。
进一步地,在固定翼模态向旋翼模态转换过程中,若模式切回到固定翼模态,则所有倾转旋翼迅速前倾,迅速回到固定翼模态,固定翼模态权重设置为100%。
采用上述技术方案带来的有益效果:
本发明在动力上采用分布式推进,解决了垂直起降与巡航飞行时的功率匹配问题;在倾转策略上采用了多旋翼分步倾转,同时还可以利用部分倾转旋翼实现机动增强和阵风缓和直接力控制,最后发挥多个旋翼的冗余备份作用,实现部分电机故障时容错控制。因此本发明具有速度快、航程远、任务灵活、可垂直起降等诸多优点,极大提高了飞行安全性与飞行品质。
附图说明
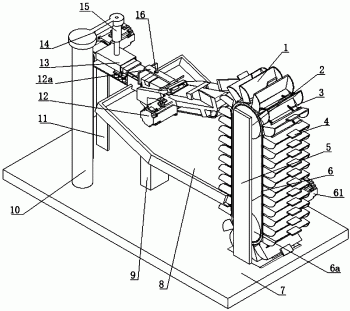
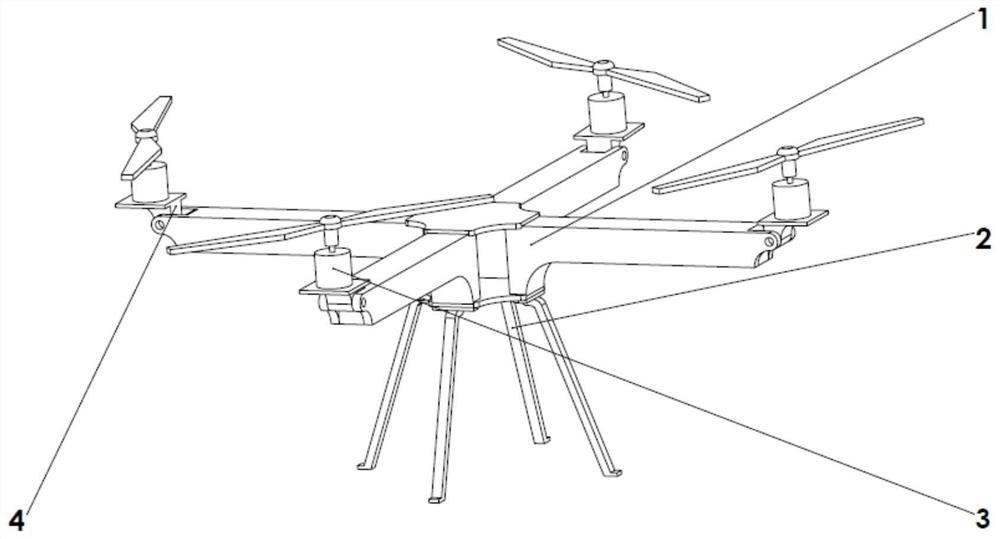
图1是本发明无人机的整体结构示意图;
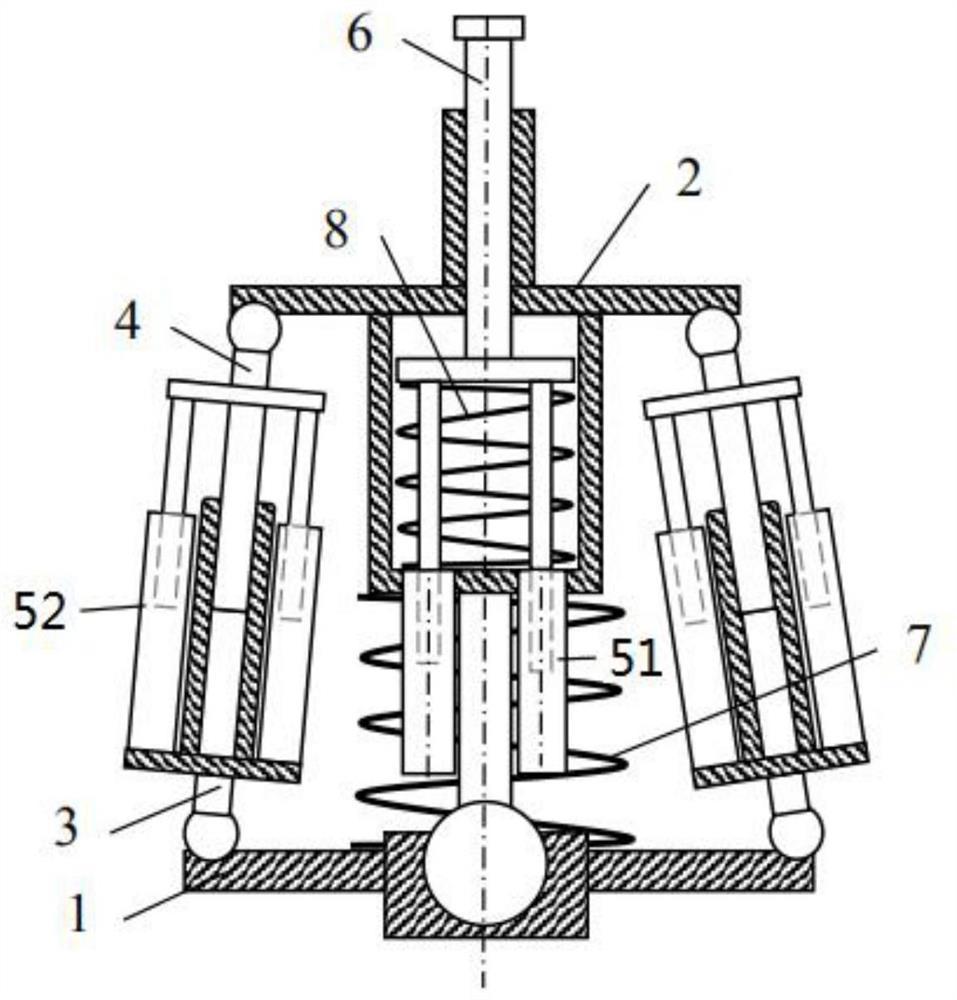
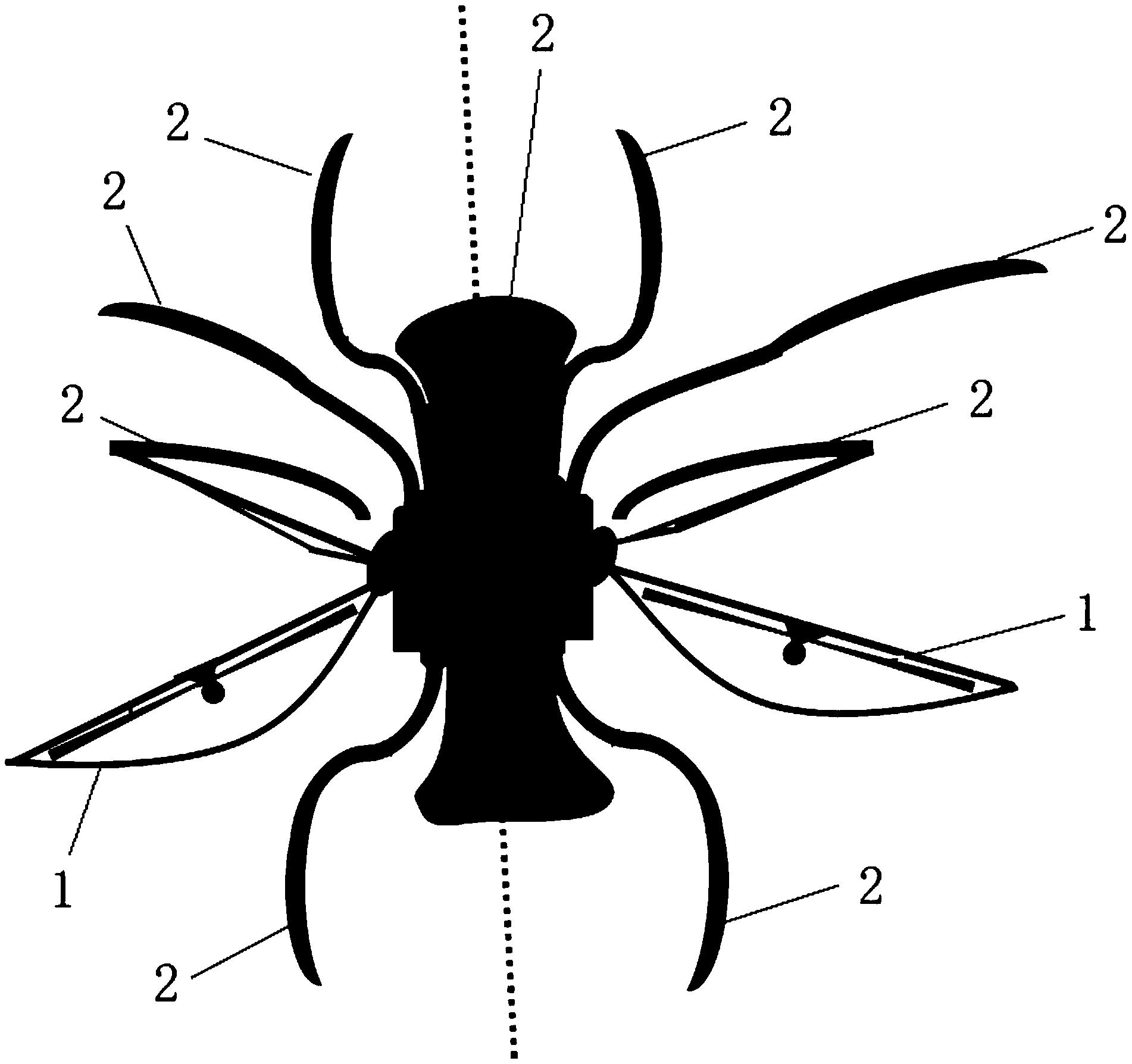
图2是本发明中倾转旋翼示意图;
图3是本发明中纵向通道控制原理框图;
图4是本发明中横向通道控制原理框图;
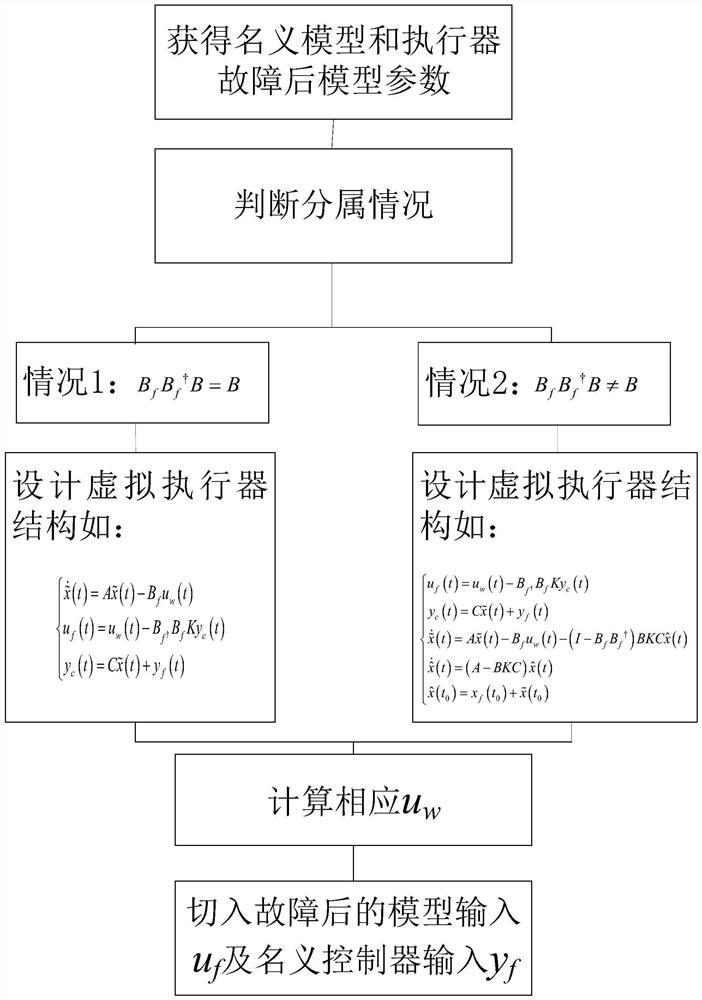
图5是本发明中过渡模态的流程图。
具体实施方式
以下将结合附图,对本发明的技术方案进行详细说明。
如图1所示,一种分布式动力倾转旋翼无人机,包括机身1、机翼2以及V形尾翼3。还包括设置于所述机翼上的第一旋翼系统4以及尾翼处的第二旋翼系统5。
如图2所示,第一旋翼系统包括设置在机翼上的四个能够倾转的倾转旋翼以及用于倾转的倾转机构,包括电机5、桨叶6以及倾转电机7。
本实施例采用优选技术方案,每个倾转机构具有限位装置,0~90°范围内,图2中的左右分别为倾转角度为0和90°的示意图。
本实施例采用优选技术方案,将第一旋翼系统中旋翼的旋转轴与无人机的重心轴重合,在倾转的过程中,无人机的重心近似不变。
本实施例采用优选技术方案,第二旋翼系统中的螺旋桨使用变距螺旋桨,在旋翼模态下控制无人机的纵向稳定性。
在本发明中,第一旋翼系统中电机数量多,对于飞机安全性有一定冗余。
本发明还针对上述分布式动力倾转旋翼无人机设计了控制方法。
(1)旋翼模态控制律:
采用两级PID控制,首先根据期望的滚转角 俯仰角θd、偏航角ψd与实际的滚转角 俯仰角θ、偏航角ψ的误差量,构造第一级PID控制,即姿态角闭环控制律:
上式中,pd、qd、rd为期望滚转角速度、期望俯仰角速度和期望偏航角速度; eθ=θd-θ,eψ=ψd-ψ; kθp、kψp是滚转角、俯仰角和偏航角误差的比例参数;
根据期望角速度(pd,qd,rd)与实际角速度(p,q,r)的误差量,构造第二级PID控制,即姿态角速度闭环控制律:
上式中,Δδp、Δδq、Δδr是三个姿态角速度的PID输出;ep=pd-p,eq=qd-q,er=rd-r;kpp、kqp、krp是三个姿态角速度的比例参数;kpd、kqd、krd是三个姿态角速度的微分参数;
(2)固定翼模态控制律:
固定翼模态控制律包括纵向通道控制律和横向通道控制律。
纵向控制通道控制俯仰角和高度保持,包含3个回路:俯仰阻尼内回路、俯仰角保持回路和高度控制回路。俯仰阻尼内回路通过IMU输出的ωy进行反馈,构成俯仰角阻尼内环,同时,根据组合导航输出的俯仰角反馈构成俯仰角控制外回路。
由于小型无人机在平飞时会有一个常值迎角,故在俯仰角控制回路加入常值配平俯仰角指令,并在升降舵加入相应的配平舵面角。高度保持回路位于最外层回路,通过设定的高度值和组合导航的输出高度值形成高度偏差,从而转换成相应的俯仰角指令,该回路采用比例积分控制方式。俯仰角指令要加入指令限幅,防止出现无人机的过大机动动作。
如图3所示,纵向通道控制律:
上式中,δe为升降舵输出控制量;ΔH=Hc-H,Hc为高度指令,H为实际高度;KHp为高度环比例环节系数,KHi为高度环积分环节系数; 为角速率环的比例环节系数,Kωy角速率环的微分环节系数; 为俯仰角,ωy为俯仰角速率;T为采样周期,k为采样周期数;
α为积分项的开关系数:
其中,ΔH(t)为当前时刻t的ΔH值,ε为设定的高度差判断阈值;
如图4所示,横向通道控制律:
当侧偏距D>M时:
δa=KD1·D+Kψ·Δψ+Kωx·ωx
当侧偏距D≤M时:
其中,δa为副翼输出控制量、δr为方向舵输出控制量;ωx、ωz分别为滚转角速度、偏航角速度;Δψ=ψd-ψ;β为积分项的开关系数;KD1、KD2分别为分段处理时的侧偏距比例系数;Kψ、Kγ为角速率环的比例环节系数;Kωz、Kωx角速率环的微分环节系数;M为设定的侧偏距阈值,在本实施例中,M优选为50米。
在倾转过程中需要随时在旋翼模态和固定翼模态进行切换,包括从旋翼模态向固定翼模态转换的过渡模态和从固定翼模态向旋转翼模态转换的过渡模态,如图5所示,其中(a)为从固定翼模态向旋转翼模态转换的流程图,(b)为从旋翼模态向固定翼模态转换的流程图。
旋翼模态转为固定翼模态分为2步,实测倾转机构从开始倾转到倾转完成需要10s,所以倾转模态一共需要大概20s时间。第一步机翼上最外侧两个电机向前倾转,在倾转过程中,旋翼和固定翼采用混控方式,控制权随前飞空速的平方变化,空速越大,固定翼控制权重越高,此阶段的旋翼控制采用六旋翼控制。当最外侧两个电机倾转完成并且空速达到V1=12m/s,旋翼控制采用四旋翼模式控制,并且让最外侧两个电机加速来提供前向速度。在此基础上,倾转完成的两个电机还用来提供航向控制。换言之,航向控制在原有四旋翼控制的基础上,叠加两个前向电机的控制,这样可以更好的稳定姿态。第二步倾转为机翼上中间两个电机倾转,倾转的前提是飞机已经到达一定的安全速度和高度,控制权重继续随前飞空速的平方变化。通过时间判断当倾转过程时间大于T1=20s并且到达安全速度V2=18m/s认为倾转完成。在旋翼向固定翼模态转换过程中,如果模式开关切回旋翼模式,则所有电机迅速回倾,旋翼控制调用六旋翼控制,旋翼模态权重设置为100%。
固定翼模态转向旋翼模态转换同样分为2步。转换过程为旋翼模态转固定翼模态的逆过程,第一步为机翼外侧两个电机向后倾转,此时固定翼和旋翼采用混控方式,控制权随空速的平方变化,空速越小,旋翼控制权重越高,当倾转完成时并且空速达到12m/s,旋翼调用四旋翼控制。第二步为内侧两个电机向后倾转,直到倾转完成转换成六旋翼控制。在固定翼向旋翼倾转模态下,若模式切换到固定翼模态,则所有电机迅速前倾,迅速转到固定翼模态,固定翼模态权重设置为100%。
实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。
一种分布式动力倾转旋翼无人机及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0