










专利摘要
本发明涉及一种无人艇水下设备自主收放系统,包括无人艇收放控制系统、伺服执行系统、执行反馈系统、岸基遥控系统和无线数据传输模块,所述无人艇收放控制系统、伺服执行系统、执行反馈系统安装在无人艇平台本体上,并通过数据线相互连接通信,所述无人艇收放控制系统通过无线数据传输模块与岸基遥控系统实现通讯链接。本发明采用单片机控制,简单而实用,附加成本低,能够满足实际应用的需求。在无人艇的实际控制中,只需要进行简单的状态数据添加便可以实现,不需要独立开来。同时,数据量少,不会占用过多的软件资源。实现无人艇的水下设备自主收放能够更大程度地提高无人艇的自主化程度。
权利要求
1.一种无人艇水下设备自主收放系统,其特征在于,包括无人艇收放控制系统(101)、伺服执行系统(102)、执行反馈系统(103)、岸基遥控系统(104)和无线数据传输模块(105),所述无人艇收放控制系统(101)、伺服执行系统(102)、执行反馈系统(103)安装在无人艇平台本体上,并通过数据线相互连接通信,所述无人艇收放控制系统(101)通过无线数据传输模块(105)与岸基遥控系统(104)实现通讯连接,所述无人艇收放控制系统(101)包括单片机主控制板(201)、伺服电机驱动器(202)、电源监控模块(203)、GPS定位模块(204)、数据处理模块(205);所述单片机主控制板(201)、伺服电机驱动器(202)、电源监控模块(203)、GPS定位模块(204)都与数据处理模块(205)连接;所述单片机主控制板(201)连接并控制伺服电机驱动器(202),使得伺服执行系统(102)得到相应的执行,并通过执行反馈系统(103)给单片机主控制板(201)反馈信息,单片机主控制板(201)经过比对相应反馈再次通过伺服电机驱动器(202)作用伺服执行系统(102)达到精确的控制。
2.根据权利要求1所述的无人艇水下设备自主收放系统,其特征在于,所述伺服执行系统(102)包括伺服电机(301)、伸缩机构(302)、限位传动连杆(303)、限位块(304)、固定支撑基座(305)、角度传感器(306)、限位连杆(307);所述伺服电机(301)安装在船体(309)上,所述角度传感器(306)固结在伺服电机(301)的输出端,所述伸缩机构(302)的固定端连接伺服电机(301),伸出端连接无人艇水下设备(308),所述限位传动连杆(303)的一端连接无人艇水下设备(308),另一端连接限位块(304),所述限位块(304)在限位连杆(307)上,通过固定支撑基座(305)固定在船体(309)上。
3.根据权利要求1所述的无人艇水下设备自主收放系统,其特征在于,所述岸基遥控系统(104)包括单片机控制模块(401)、无线数据传输模块(105),内置电源模块(403)、反馈数据显示模块(402)、水下设备收放操作模块(404),所述内置电源模块(403)为各个模块供电,所述反馈数据显示模块(402)和水下设备收放操作模块(404)连接单片机控制模块(401),所述单片机控制模块(401)通过无线数据传输模块(105)连接无人艇收放控制系统(101),接收无人艇收放控制系统(101)实时地传递过来的数据,通过反馈数据显示模块(402)实时了解无人艇水下设备(308)收放过程是否达到了目标位置,再作用于水下设备收放操作模块(404)进行操作。
说明书
技术领域
本发明属于特种机器人技术领域,具体涉及一种无人艇水下设备自主收放系统。
背景技术
近年来,随着无人智能系统的高速发展,无人艇技术也越来越受到重视,国内外越来越多的科研院所投入到无人艇的研制当中,并且,已经有很多成熟的无人艇投入到实际的应用中,使得无人艇的应用也越来越广泛。
无人艇作为在海洋环境中作业的智能系统,需要携带很多重要的水下设备。这些水下设备都是非常贵重和精密的,目前,常用的携带方法是采用拖曳的安装方式,但是在很多突发的情况下,复杂多变的海洋环境会对无人艇的水下设备造成损坏,一些水下设备的损坏或者丢失将会对无人艇造成严重的打击。同时,一些重要的水下设备在工作中需要间歇性的调整设备在水中的不同深度,以提高其工作的可靠性。因此,面对这种情况,无人艇水下设备的自主、自如收放成为了无人艇本身自主性,无人艇安全性的一大重要因素。
发明内容
本发明针对无人艇的现状,水下设备受到的潜在威胁,提供了一种无人艇水下设备自主收放系统,该系统不仅能够实现对无人艇水下设备的收放,避免损失,同时,该系统能够直接嵌入到大多数无人艇的控制体系架构中,不会带来其他的累赘,增加的控制量少,反馈信息少,控制过程简单,并不会影响无人艇的实时性与可靠性。
为达到上述目的,本发明解决其技术问题所采用的技术方案是:
一种无人艇水下设备自主收放系统,包括无人艇收放控制系统、伺服执行系统、执行反馈系统、岸基遥控系统和无线数据传输模块,所述无人艇收放控制系统、伺服执行系统、执行反馈系统安装在无人艇平台本体上,并通过数据线相互连接通信,所述无人艇收放控制系统通过无线数据传输模块与岸基遥控系统实现通讯链接。
所述无人艇收放控制系统包括单片机主控制板、伺服电机驱动器、电源监控模块、GPS定位模块、数据处理模块;所述单片机主控制板、伺服电机驱动器、电源监控模块、GPS定位模块都与数据处理模块连接;所述单片机主控制板连接并控制伺服电机驱动器,使得伺服执行系统得到相应的执行,并通过执行反馈系统给单片机主控制板反馈信息,单片机主控制板经过比对相应反馈再次通过伺服电机驱动器作用伺服执行系统达到精确的控制。
所述伺服执行系统包括伺服电机、伸缩机构、限位传动连杆、限位块、固定支撑基座、角度传感器、限位连杆;所述伺服电机安装在船体上,所述角度传感器固结在伺服电机的输出端,所述伸缩机构的固定端连接伺服电机,伸出端连接无人艇水下设备,所述限位传动连杆的一端连接无人艇水下设备,另一端连接限位块,所述限位块在限位连杆上,通过固定支撑基座固定在船体上。
所述岸基遥控系统包括单片机控制模块、无线数据传输模块,内置电源模块、反馈数据显示模块、水下设备收放操作模块,所述内置电源模块为各个模块供电,所述反馈数据显示模块和水下设备收放操作模块连接单片机控制模块,所述单片机控制模块通过无线数据传输模块连接无人艇收放控制系统,接收无人艇收放控制系统实时地传递过来的数据,通过反馈数据显示模块实时了解无人艇水下设备收放过程是否达到了目标位置,再作用于水下设备收放操作模块进行操作。
与现有技术相比,本发明的实质性特点和显著优点是:
本自主收放系统能够尽最大可能保障水下重要精密设备的安全性。自主的收放功能提高了无人艇自身的智能化、自主化程度。
本自主收放系统能够搭载在原本的无人艇体系架构中,不会影响无人艇艇体正常的行驶功能,同时占用较少的软件资源,不会影响无人艇的实时性及可靠性。通过改变设备在水下不同的深度要求,提高设备的工作效率。
附图说明
图1为无人艇水下设备自主收放系统的系统架构示意图。
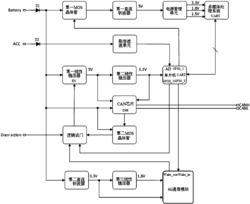
图2为无人艇收放控制系统示意图。
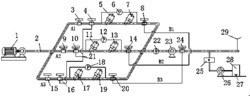
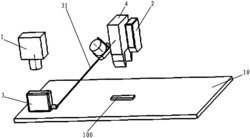
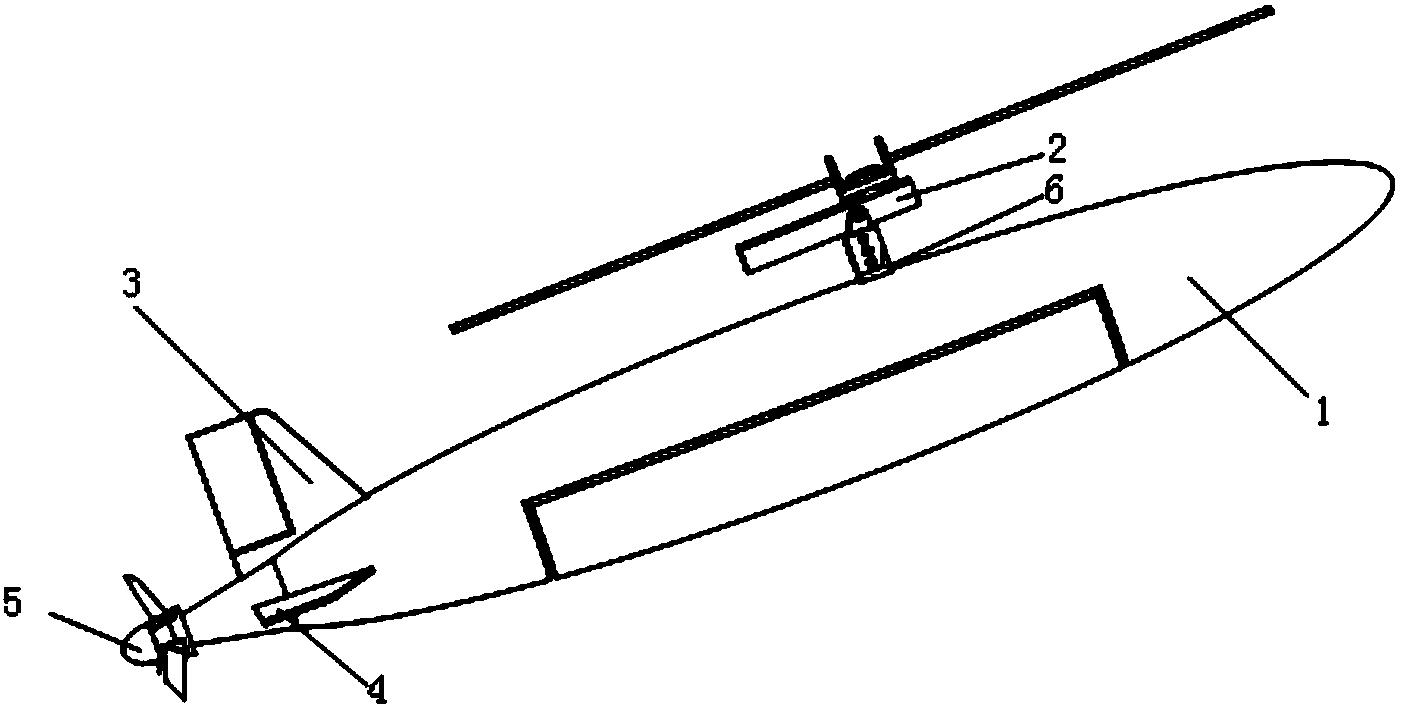
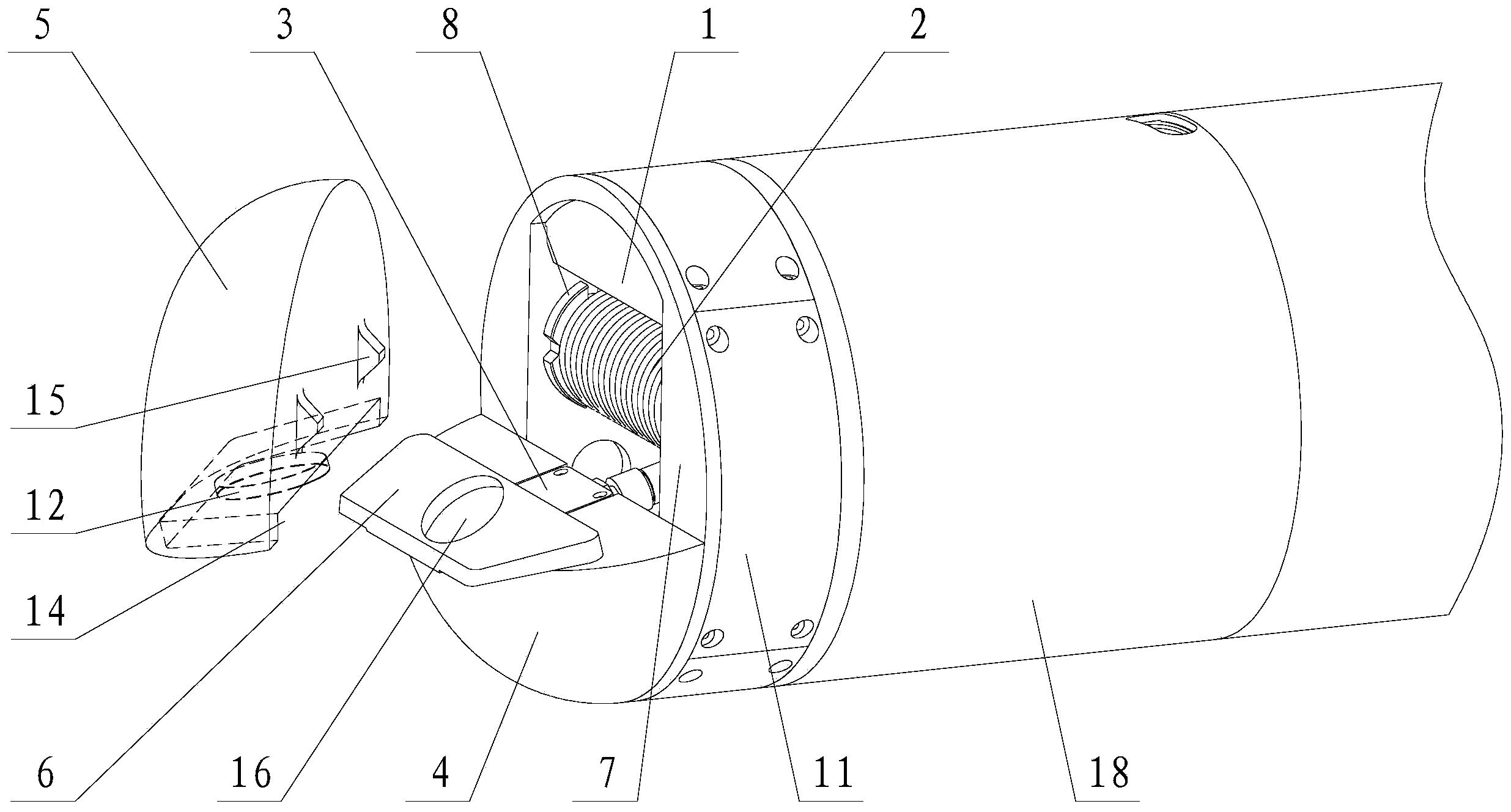
图3为无人艇伺服执行系统结构示意图。
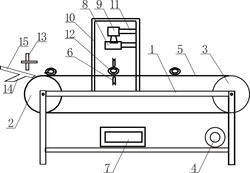
图4为岸基遥控系统示意图。
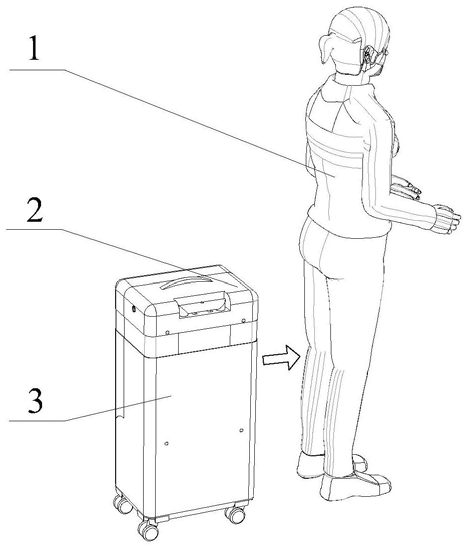
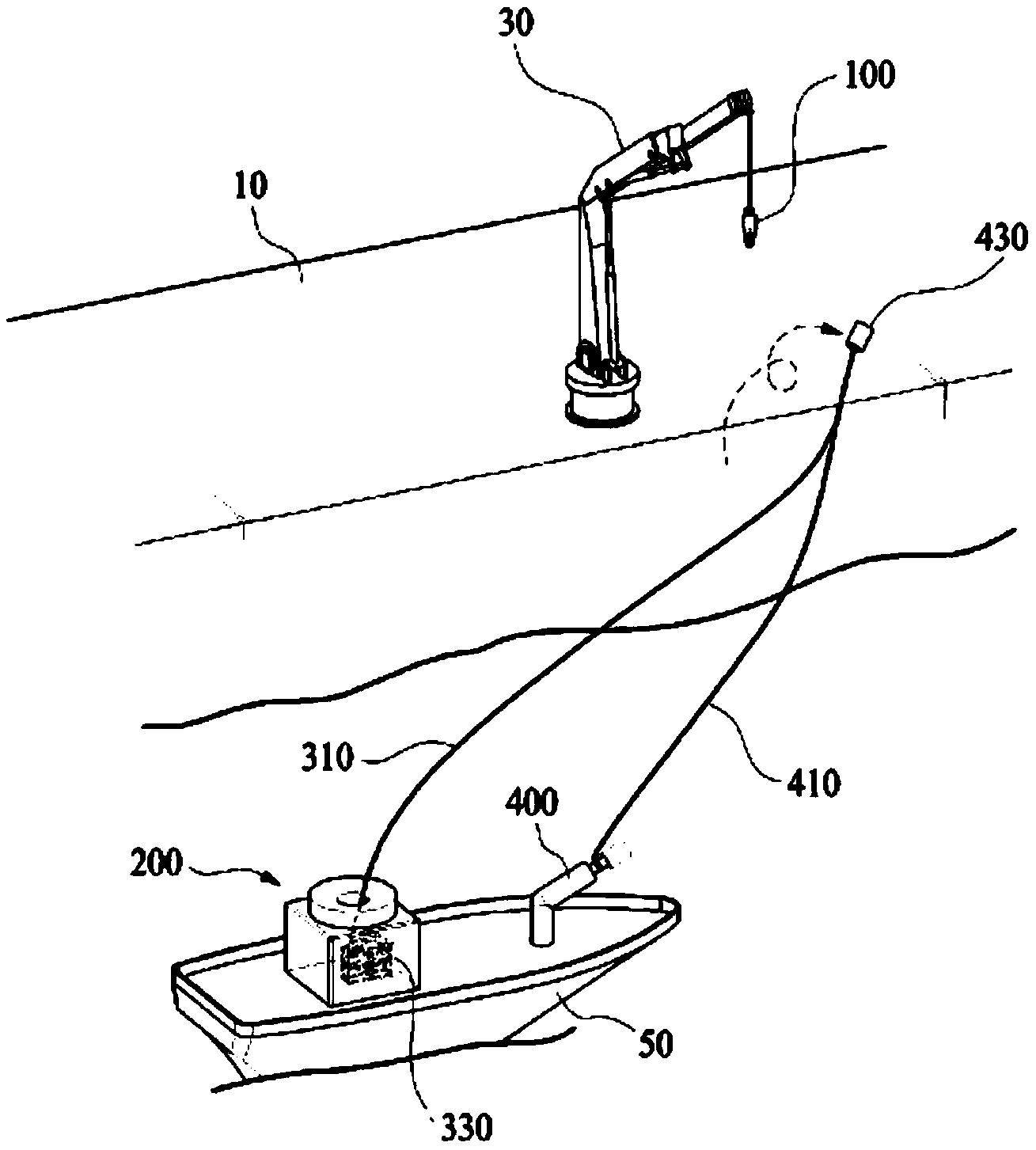
图5为无人艇水下设备收放系统工作示意图。
具体实施方式
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
如图 1 所示,一种无人艇水下设备自主收放系统,包括无人艇收放控制系统101、伺服执行系统102、执行反馈系统103、岸基遥控系统104和无线数据传输模块105,所述无人艇收放控制系统101、伺服执行系统102、执行反馈系统103安装在无人艇平台本体上,并通过数据线相互连接通信,所述无人艇收放控制系统101通过无线数据传输模块105与岸基遥控系统104实现通讯链接。
如图2所示,所述无人艇收放控制系统101包括单片机主控制板201、伺服电机驱动器202、电源监控模块203、GPS定位模块204、数据处理模块205;所述单片机主控制板201、伺服电机驱动器202、电源监控模块203、GPS定位模块204都与数据处理模块205连接;所述单片机主控制板201连接并控制伺服电机驱动器202,使得伺服执行系统102得到相应的执行,并通过执行反馈系统103给单片机主控制板201反馈信息,单片机主控制板201经过比对相应反馈再次通过伺服电机驱动器202作用伺服执行系统102达到精确的控制。
如图3所示,所述伺服执行系统102包括伺服电机301、伸缩机构302、限位传动连杆303、限位块304、固定支撑基座305、角度传感器306、限位连杆307;所述伺服电机301安装在船体309上,所述角度传感器306固结在伺服电机301的输出端,所述伸缩机构302的固定端连接伺服电机301,伸出端连接无人艇水下设备308,所述限位传动连杆303的一端连接无人艇水下设备308,另一端连接限位块304,所述限位块304在限位连杆307上,通过固定支撑基座305固定在船体309上。
如图4所示,所述岸基遥控系统104包括单片机控制模块401、无线数据传输模块105,内置电源模块403、反馈数据显示模块402、水下设备收放操作模块404,所述内置电源模块403为各个模块供电,所述反馈数据显示模块402和水下设备收放操作模块404连接单片机控制模块401,所述单片机控制模块401通过无线数据传输模块105连接无人艇收放控制系统101,接收无人艇收放控制系统101实时地传递过来的数据,通过反馈数据显示模块402实时了解无人艇水下设备308收放过程是否达到了目标位置,再作用于水下设备收放操作模块404进行操作。
如图5所示,本发明系统的操作过程如下:
通过水下设备收放操作模块404进行操作,岸基遥控系统104通过单片机控制模块401读取收放操作命令,并将命令数据通过无线数据传输模块105达到无人艇收放控制系统101;所述无人艇收放控制系统101中,单片机主控制板201接收来自无线数据传输模块105的信息,通过信息之间的交互,实现与伺服电机驱动器202的数据交换,从而实现对伺服执行系统102的控制;所述伺服执行系统102中,伺服电机301接收来自收放控制系统101的信息,并进行响应,从而实现无人艇水下设备308的上下运动及前后运动,通过伺服电机301输出端的角度传感器306不断地更新运动中的角度值,并将对应的角度值通过之前的通信链路完整地返回到岸基遥控系统104中。
岸基遥控系统104通过实时接收角度传感器306中的信息,通过数据处理得到当前无人艇水下设备308的收放高度,所述岸基遥控系统中104,反馈数据显示模块402将信息显示出来,岸基操作人员可随时依据反馈的信息再次决定对水下设备收放操作模块404的收放操作,如此往复,实现对设备的自主收放控制。
一种无人艇水下设备自主收放系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0