








专利摘要
本实用新型涉及一种深海生态过程长期定点观测装置,包括释放抛载系统以及设于释放抛载系统上的电池舱、控制舱、浮力球、铱星信标、光信标、超短基线应答器和罗盘舱。本实用新型采用声学释放器与自动脱钩装置两种抛载方案,声学抛载手段失灵时可以采用自动脱钩装置延时抛载。本实用新型除了可以通过声学释放器释放抛载还可以通过应急抛载机构释放抛载,应急抛载机构与声学释放器抛载机构为串联形式,当声学释放器发生故障无法抛载时可启动应急抛载装置实现抛载上浮,提高了设备作业的安全性。
权利要求
1.一种深海生态过程长期定点观测装置,其特征在于:包括释放抛载系统以及设于释放抛载系统上的电池舱(41)、控制舱(34)、浮力球(45)、铱星信标(37)、光信标(35)、超短基线应答器(36)和罗盘舱(39)。
2.根据权利要求1所述的一种深海生态过程长期定点观测装置,其特征在于所述释放抛载系统:包括声学释放器(1)、自动脱钩装置(2)、脱钩支架(4)、抛载长钩A(5)、抛载长钩B(6)、压载(7)及深海结构物框架(8),其中声学释放器(1)及自动脱钩装置(2)分别安装在深海结构物框架(8)上,在该自动脱钩装置(2)下方的两侧各设有一套抛载执行机构,每套抛载执行机构包括抛载长钩A(5)及抛载长钩B(6),每套的抛载长钩A(5)及抛载长钩B(6)的末端分别铰接于安装在所述深海结构物框架(8)上的脱钩支架(4),并分别挂有压载(7),所述抛载长钩A(5)及抛载长钩B(6)的首端搭接;两套所述抛载执行机构中的抛载长钩B(6)分别连接有连接缆(9),两所述抛载长钩B(6)上的连接缆(9)分别与公共连接缆(10)的一端相连,该公共连接缆(10)的另一端由所述自动脱钩装置(2)穿过、挂在所述声学释放器(1)上;两套所述抛载执行机构中的抛载长钩B(6)上的连接缆(9)通过声学释放器(1)接收到声学信号释放公共连接缆(10)或通过自动脱钩装置(2)对公共连接缆(10)脱钩由绷紧状态变为松弛状态,实现各所述压载(7)抛载。
3.根据权利要求2所述的一种深海生态过程长期定点观测装置,其特征在于:所述自动脱钩装置(2)包括水密插头(11)、电机壳(13)、外罩(15)、凸轮(16)、锁紧杆(18)、滑轮轴(19)、U形连接件(20)、滚轮轴承(21)及锁紧件(22),该电机壳(13)的一端通过电机安装架(12)固定在所述深海结构物框架(8)上,另一端连接有所述外罩(15),所述电机安装架(12)上分别安装有水密插头(11)及内置单片机和电子罗盘的电池与罗盘舱(24);所述电机壳(13)内部容置有电机,电机输出轴(17)上连接有位于外罩(15)内的所述凸轮(16),所述滑轮轴(19)的两端分别与电机壳(13)及外罩(15)转动连接,一端由所述外罩(15)穿出、连接有所述锁紧杆(18),所述U形连接件(20)的一侧与滑轮轴(19)连动,另一侧铰接有与所述凸轮(16)抵接的滚轮轴承(21),该U形连接件(20)及滚轮 轴承(21)均位于所述外罩(15)内;所述外罩(15)的外表面安装有锁紧件(22),所述公共连接缆(10)由该锁紧件(22)与所述锁紧杆(18)之间穿过,通过所述锁紧杆(18)的转动实现脱钩。
4.根据权利要求3所述的一种深海生态过程长期定点观测装置,其特征在于:所述锁紧杆(18)的一端与滑轮轴(19)外露于外罩(15)的一端连动,另一端呈钩状,所述锁紧件(22)呈“C”形。
5.根据权利要求3所述的一种深海生态过程长期定点观测装置,其特征在于:所述电机输出轴(17)由外罩(15)穿出,且端部设有指示箭头(23);所述外罩(15)的外表面上设有“开”、“关”指示。
6.根据权利要求3所述的一种深海生态过程长期定点观测装置,其特征在于:所述自动脱钩装置(2)位于声学释放器(1)的斜下方,松弛状态的所述公共连接缆(10)穿过该自动脱钩装置(2)后变为绷紧状态。
7.根据权利要求2所述的一种深海生态过程长期定点观测装置,其特征在于:所述抛载长钩A(5)及抛载长钩B(6)的末端均呈钩状,并分别铰接于所述脱钩支架(4)上、且挂有所述压载(7);所述抛载长钩B(6)的首端呈“T”形,所述抛载长钩A(5)的首端设有防脱件(24),该防脱件(24)为中空的半圆柱状,并在半圆柱状开口的两侧沿径向设有U形槽,“T”形抛载长钩B(6)的竖边位于所述半圆柱状内,该“T”形的横边容置于所述U形槽中,实现所述抛载长钩A(5)及抛载长钩B(6)首端的搭接。
8.根据权利要求1所述的一种深海生态过程长期定点观测装置,其特征在于:每套所述抛载执行机构与公共连接缆(10)另一端之间的深海结构物框架(8)上均设有导缆轮(3),所述公共连接缆(10)的另一端与每套所述抛载执行机构之间的连接缆(9)经过导缆轮(3)后拉住所述抛载长钩B(6)。
9.根据权利要求1所述的一种深海生态过程长期定点观测装置,其特征在于所述电池舱(41)与控制舱(34)均为玻璃球壳体,安装在释放抛载系统的物框架(8)的中层位置;控制舱(41)内设有控制子系统,用于控制四个电池舱(41)中的任意一个或几个为本装置提供能源,并与罗盘舱(39)以及自动脱钩装置(2)中的电机连接。
10.按权利要求9所述一种深海生态过程长期定点观测装置,其特征在于所述控制子系统包括:开关电源模块以及与其连接的嵌入式控制器、串行通讯总线、继电器;所述嵌入式控制器与串行通讯总线、继电器连接;所述继电器与电池舱内的电池组连接。
说明书
技术领域
本实用新型涉及深海生态过程长期定点观测系统,具体地说是一种深海生态过程长期定点观测装置。
背景技术
深海作为海洋系统的重要组成部分,拥有深海平原、海山、热液、冷泉等特殊环境,导致海底地形、理化因子的剧烈变化,从而影响深层海洋动力、热力等过程,进而孕育了独特的生态系统。但是,由于调查设备和手段的缺乏,目前对于深海系统的了解大多基于一次或者数次取样调查的结果,缺少连续系统的观测资料,导致对深海环境及其栖息生物缺乏系统的过程研究和机理认识。对于一种能够在深海环境现场连续观测及相关数据采集的设备需求日益加深。
实用新型内容
本实用新型的目的在于提供一种深海生态过程长期定点观测装置。该装置实现了对深海冷泉及热液区生物富集群落生态系统的长期观察及数据监测采集。
本实用新型的目的是通过以下技术方案来实现的:
一种深海生态过程长期定点观测装置,包括释放抛载系统以及设于释放抛载系统上的电池舱、控制舱、浮力球、铱星信标、光信标、超短基线应答器和罗盘舱。
所述释放抛载系统:包括声学释放器、自动脱钩装置、脱钩支架、抛载长钩A、抛载长钩B、压载及深海结构物框架,其中声学释放器及自动脱钩装置分别安装在深海结构物框架上,在该自动脱钩装置下方的两侧各设有一套抛载执行机构,每套抛载执行机构包括抛载长钩A及抛载长钩B,每套的抛载长钩A及抛载长钩B的末端分别铰接于安装在所述深海结构物框架上的脱钩支架,并分别挂有压载,所述抛载长钩A及抛载长钩B的首端搭接;两套所述抛载执行机构中的抛载长钩B分别连接有连接缆,两所述抛载长钩B上的连接缆分别与公共连接缆的一端相连,该公共连接缆的另一端由所述自动脱钩装置穿过、挂在所述声学释放器上;两套所述抛载执行机构中的抛载长钩B上的连接缆通过声学释放器接收到声学信号释放公共连接缆或通过自动脱钩装置对公共连接缆脱钩由绷紧状态变为松弛状态,实现各所述压载抛载。
所述自动脱钩装置包括水密插头、电机壳、外罩、凸轮、锁紧杆、滑轮轴、U形连接件、滚轮轴承及锁紧件,该电机壳的一端通过电机安装架固定在所述深海结构物框架上,另一端连接有所述外罩,所述电机安装架上分别安装有水密插头及内置单片机和电子罗盘的电池与罗盘舱;所述电机壳内部容置有电机,电机输出轴上连接有位于外罩内的所述凸轮,所述滑轮轴的两端分别与电机壳及外罩转动连接,一端由所述外罩穿出、连接有所述锁紧杆,所述U形连接件的一侧与滑轮轴连动,另一侧铰接有与所述凸轮抵接的滚轮轴承,该U形连接件及滚轮轴承均位于所述外罩内;所述外罩的外表面安装有锁紧件,所述公共连接缆由该锁紧件与所述锁紧杆之间穿过,通过所述锁紧杆的转动实现脱钩。
所述锁紧杆的一端与滑轮轴外露于外罩的一端连动,另一端呈钩状,所述锁紧件呈“C”形。
所述电机输出轴由外罩穿出,且端部设有指示箭头;所述外罩的外表面上设有“开”、“关”指示。
所述自动脱钩装置位于声学释放器的斜下方,松弛状态的所述公共连接缆穿过该自动脱钩装置后变为绷紧状态。
所述抛载长钩A及抛载长钩B的末端均呈钩状,并分别铰接于所述脱钩支架上、且挂有所述压载;所述抛载长钩B的首端呈“T”形,所述抛载长钩A的首端设有防脱件,该防脱件为中空的半圆柱状,并在半圆柱状开口的两侧沿径向设有U形槽,“T”形抛载长钩B的竖边位于所述半圆柱状内,该“T”形的横边容置于所述U形槽中,实现所述抛载长钩A及抛载长钩B首端的搭接。
每套所述抛载执行机构与公共连接缆另一端之间的深海结构物框架上均设有导缆轮,所述公共连接缆的另一端与每套所述抛载执行机构之间的连接缆经过导缆轮后拉住所述抛载长钩B。
所述电池舱与控制舱均为玻璃球壳体,安装在释放抛载系统的物框架的中层位置;控制舱内设有控制子系统,用于控制四个电池舱中的任意一个或几个为本装置提供能源,并与罗盘舱以及自动脱钩装置中的电机连接。
所述控制子系统包括:开关电源模块以及与其连接的嵌入式控制器、串行通讯总线、继电器;所述嵌入式控制器与串行通讯总线、继电器连接;所述继电器与电池舱内的电池组连接。
本实用新型的优点与积极效果为:
1.本实用新型的电池舱采用玻璃球体结构,比传统密封舱更加安全、轻便。
2.球形控制舱可提高外表面利用面积,可设置更多接口,不仅可以满足常规传感器的需要同时也支持扩展备份。舱内设置LED显示屏,可由ROV摄像头通过透明舱壁观测显示屏显示代码,反馈装置各部件设备状态。
3.本实用新型通过电子罗盘监测设备倾角状态,当下放过程中或着陆后装置倾角过大时由控制舱控制抛载机构抛载上浮。
4.本实用新型除了可以通过声学释放器释放抛载还可以通过应急抛载机构释放抛载,应急抛载机构与声学释放器抛载机构为串联形式,当声学释放器发生故障无法抛载时可启动应急抛载装置实现抛载上浮,提高了设备作业的安全性。
附图说明
图1为本实用新型的深海结构物释放抛载系统结构主视图;
图2为图1的左视图;
图3为图2的俯视图;
图4为图3中的B-B剖视图;
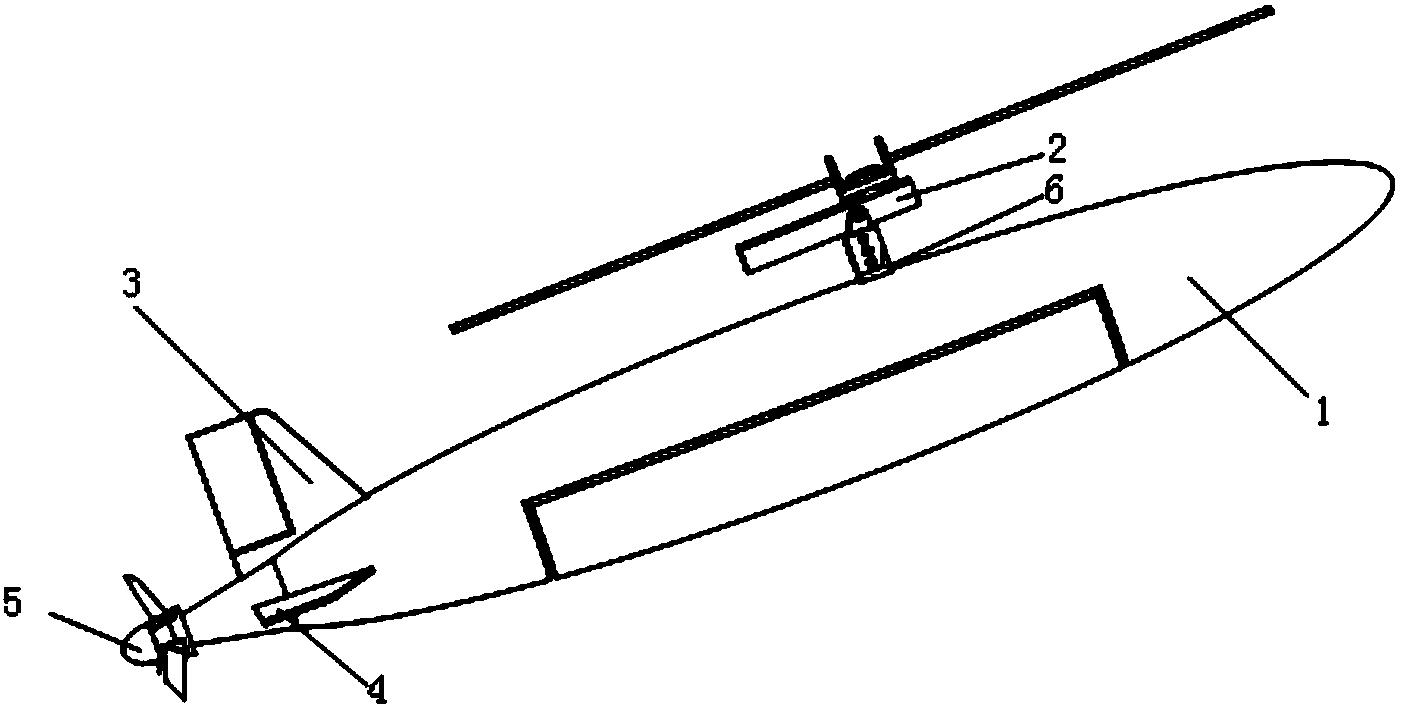
图5为深海结构物释放抛载系统的轴测视图;
图6为深海结构物释放抛载系统侧视图中去掉抛载长钩B末端脱钩支架后的结构示意图;
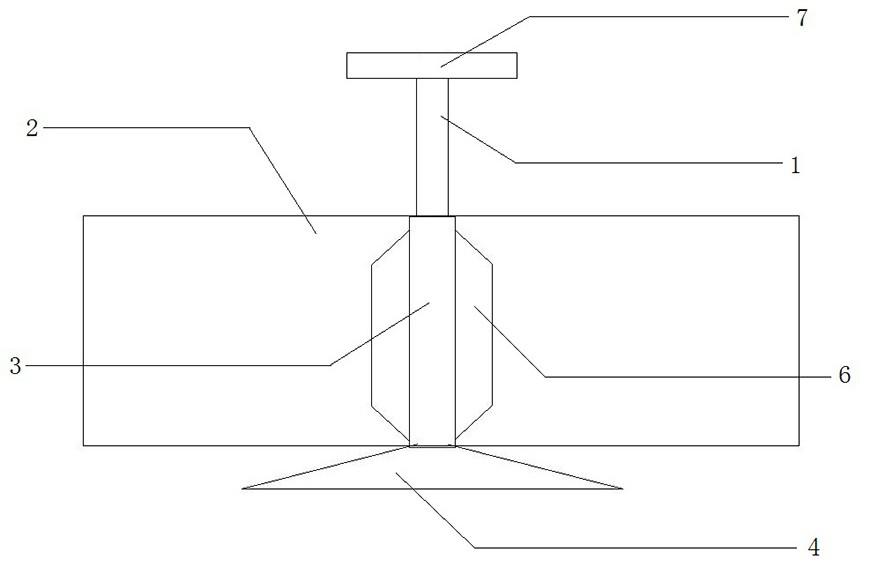
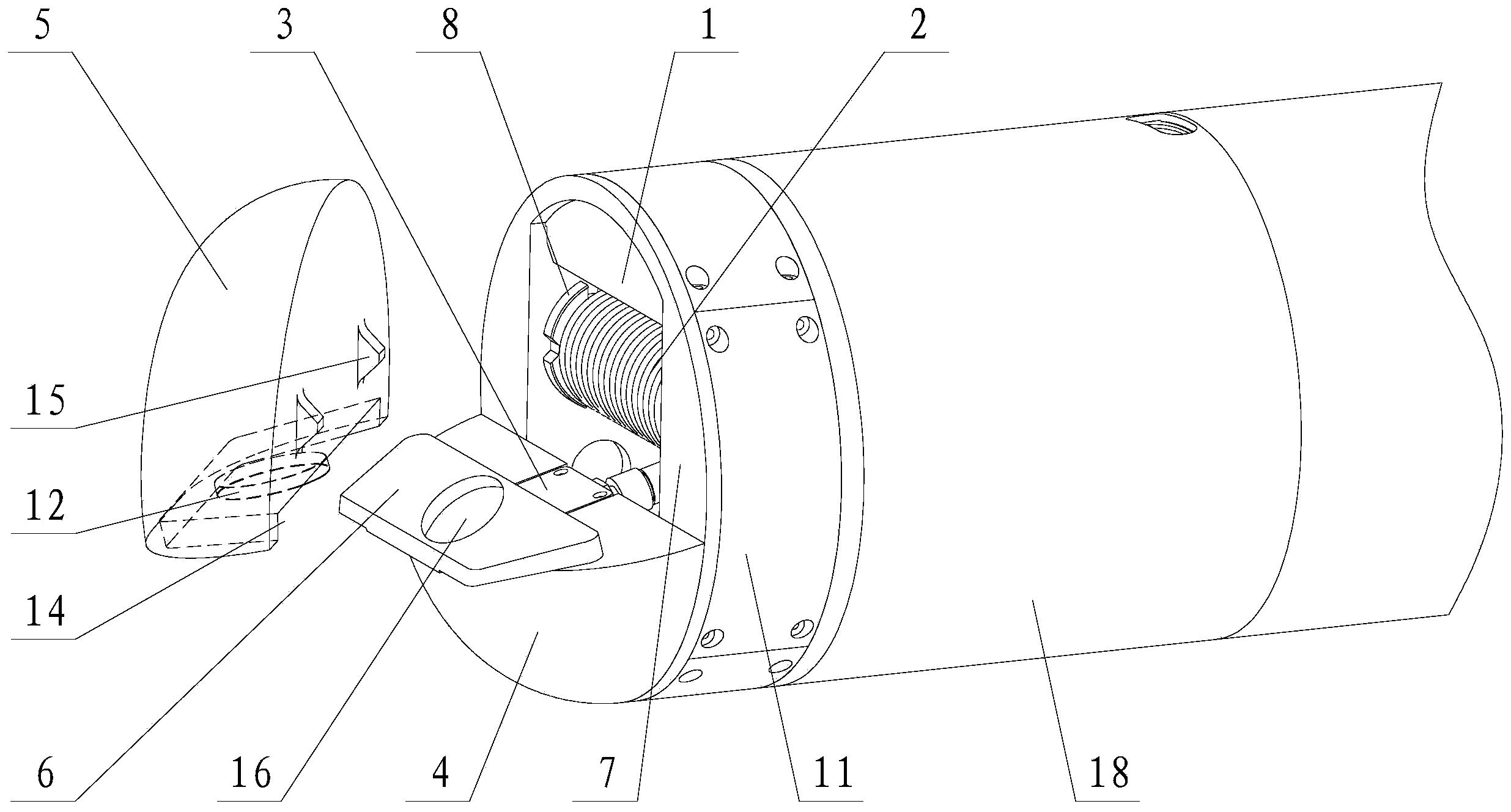
图7为自动脱钩装置的立体结构示意图;
图8为图7中去掉外罩后的立体结构示意图;
图9为抛载长钩A与抛载长钩B搭接的结构示意图;
其中:1为声学释放器,2为自动脱钩装置,3为导缆轮,4为脱钩支架,5为抛载长钩A,6为抛载长钩B,7为压载,8为深海结构物框架,9为连接缆,10为公共连接缆,11为水密插头,12为电机安装架,13为电机壳,14为法兰,15为外罩,16为凸轮,17为电机输出轴,18为锁紧杆,19为滑轮轴,20为U形连接件,21为滚轮轴承,22为锁紧件,23为指示箭头,24为防脱件;
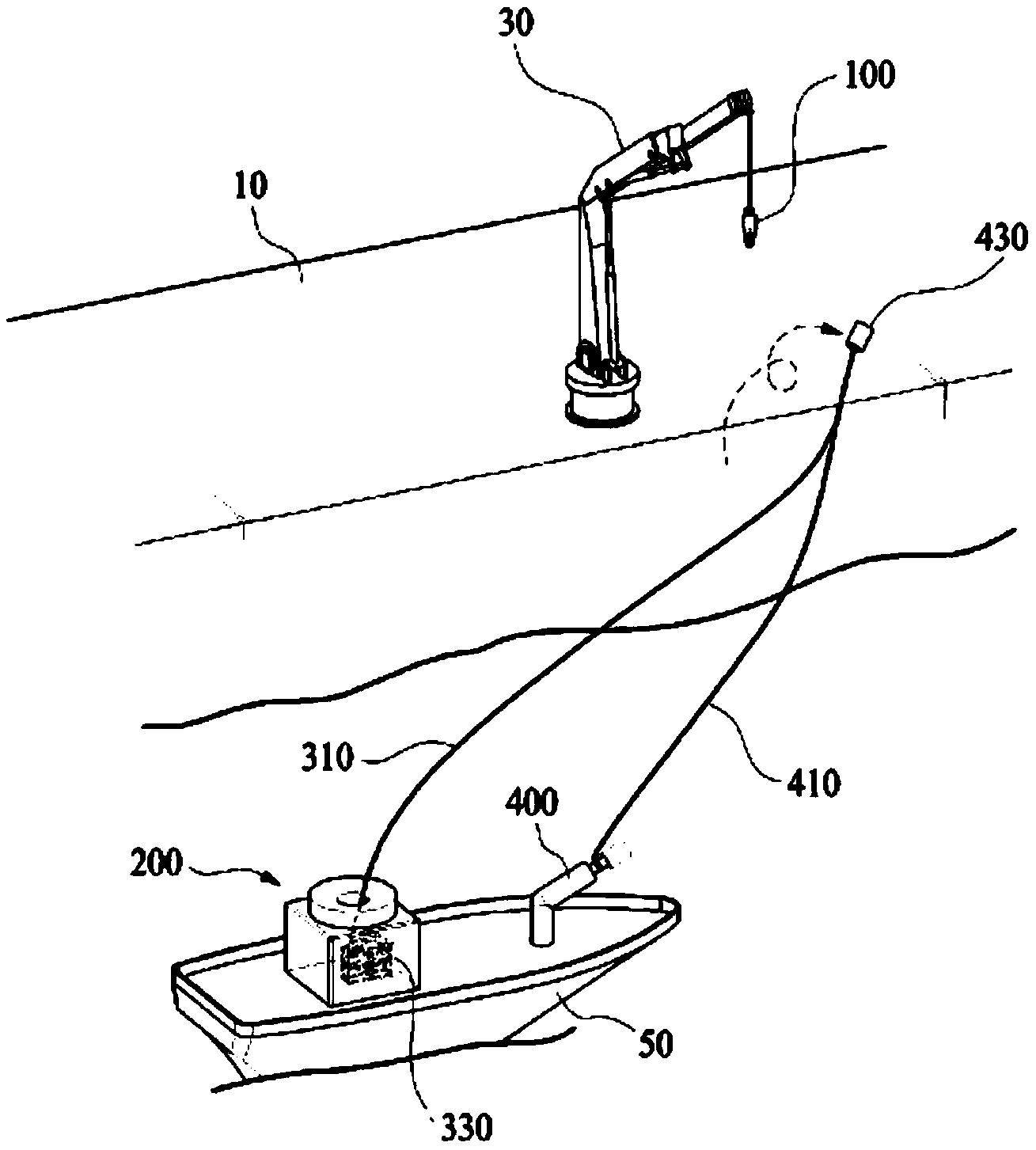
图10为起吊装置结构图;
图11为本实用新型的结构主视图;
图12为图1的侧视图;
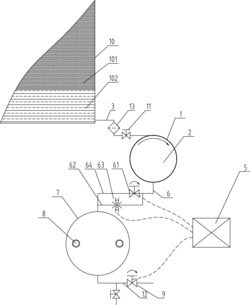
图13为本实用新型的系统组成框图;
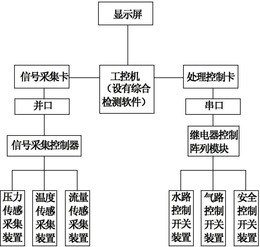
图14为控制子系统硬件组成框图;
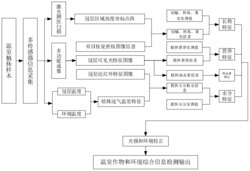
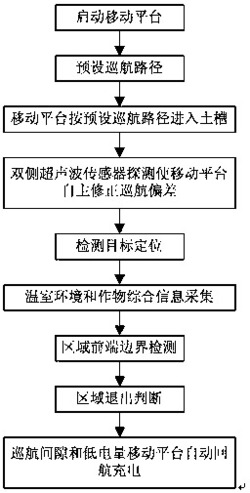
图15为作业流程示意图;
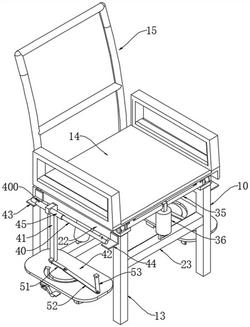
图10~图12中:31为声学多普勒流速剖面仪,32为二氧化碳传感器,33甲烷传感器,34为控制舱,35为光信标,36为超短基线应答器,37为铱星信标,39为罗盘舱,40温盐深传感器,41电池舱,42照相机及闪光灯,43底脚护板,44为ROV抓取把手,45为浮力球,46为起吊装置;51焊接板,52不锈钢吊钩,53起吊圆环。
具体实施方式
下面结合附图对本实用新型作进一步详述。
如图1~6所示,深海结构物释放抛载系统包括声学释放器1、自动脱钩装置2、导缆轮3、脱钩支架4、抛载长钩A5、抛载长钩B6、压载7及深海结构物框架8,其中声学释放器1及自动脱钩装置2分别安装在深海结构物框架8上,自动脱钩装置2位于声学释放器1的斜下方;在该自动脱钩装置2下方的两侧各设有一套抛载执行机构,每套抛载执行机构包括抛载长钩A5及抛载长钩B6,每套的抛载长钩A5及抛载长钩B6的末端分别铰接于固定在深海结构物框架8上的脱钩支架4,并分别挂有压载7,抛载长钩A5及抛载长钩B6的首端搭接。两套抛载执行机构中的抛载长钩B6分别连接有连接缆9,两抛载长钩B6上的连接缆9分别与公共连接缆10的一端相连,该公共连接缆10的另一端由自动脱钩装置2穿过、挂在声学释放器1上;每套抛载执行机构与公共连接缆10另一端之间的深海结构物框架8上均设有导缆轮3,导缆轮3分为两路,公共连接缆10的另一端与每套抛载执行机构之间的连接缆9分别经过一路导缆轮3后拉住两侧的抛载长钩B6。如图2、图4~6及图9所示,抛载长钩A5及抛载长钩B6的末端均呈钩状,并分别铰接于脱钩支架4上、且挂有压载7;抛载长钩B6的首端呈“T”形,抛载长钩A5的首端设有防脱件24,该防脱件24为中空的半圆柱状,并在半圆柱状开口的两侧沿径向设有U形槽,“T”形抛载长钩B6的竖边位于半圆柱状内,该“T”形的横边容置于U形槽中,实现抛载长钩A5及抛载长钩B6首端的搭接。
如图7、图8所示,自动脱钩装置2包括水密插头11、电机壳13、外罩15、凸轮16、锁紧杆18、滑轮轴19、U形连接件20、滚轮轴承21及锁紧件22,该电机壳13的一端通过电机安装架12固定在深海结构物框架8上,另一端设有法兰14,外罩15固接在该法兰14上;电机安装架12上分别安装有水密插头11及内置单片机和电子罗盘的电池与罗盘舱24。电机壳13内部容置有电机,电机输出轴17上连接有位于外罩15内的凸轮16,滑轮轴19的两端分别与电机壳13及外罩15转动连接,一端由外罩15穿出、连接有锁紧杆18该锁紧杆18的一端与滑轮轴19外露于外罩15的一端连动,另一端呈钩状。U形连接件20的一侧与滑轮轴19连动,另一侧(U形开口的一侧)铰接有与凸轮16抵接的滚轮轴承21,该U形连接件20及滚轮轴承21均位于外罩15内。外罩15的外表面安装有锁紧件22,该锁紧件22呈“C”形;公共连接缆10由该锁紧件22与锁紧杆18之间穿过,通过锁紧杆18的转动实现脱钩。电机输出轴17由外罩15穿出,且端部设有指示箭头23;外罩15的外表面上设有“开”、“关”指示。
本实用新型的声学释放器1为市购产品,购置于OCEANO公司,型号为2500Light。
如图10所示,起吊装置包括焊接板1、吊钩2及起吊圆环3,吊钩2的底部通过连接件与深海结构物框架8相连,顶部焊接有焊接板1,吊钩2连接于焊接板1上。该吊钩2为不锈钢材质。
本实用新型的工作原理为:
本实用新型采取声学抛载与自动脱钩装置抛载两种结合的复合式抛载方案。声学抛载模式是由传统的声学释放器1触发实现的。自动脱钩装置2的抛载有两种工作情况,其一是预设时间延时抛载,其二是通过深海结构物框架8的姿态反馈信号判定的应急抛载。两种抛载方案使用同一组压载7(共四个),每次抛载可抛四个压载7,采用双点触发四点抛载的结构。具体为:
声学抛载:声学释放器1接收到释放信号后张开底部的夹钳,公共连接缆10松弛,即可使拉住抛载长钩B6的两根连接缆9松弛,抛载长钩B6由于压载7作用首端下垂,同时抛载长钩A5由于失去抛载长钩B6的支撑,首端同时下垂,实现四点压载抛载实现抛载。
自动脱钩装置的延时抛载:自动脱钩装置2由电池与罗盘舱24内的单片机控制,预设抛载时间;到了抛载时间后,单片机控制电机工作,带动凸轮16转动,通过滚轮轴承21、U形连接件20将转动传递给滑轮轴19,再由滑轮轴19带动锁紧杆18转动,与锁紧件22张开,公共连接缆10即由锁紧杆18与锁紧件22之间脱出,由绷紧状态变为松弛状态,即可使拉住抛载长钩B6的两根连接缆9松弛,抛载长钩B6由于压载7作用首端下垂,同时抛载长钩A5由于失去抛载长钩B6的支撑,首端同时下垂,实现四点压载抛载实现抛载。
自动脱钩装置的应急抛载:在电池与罗盘舱24内的电子罗盘监测到深海结构物姿态角度超过设定角度、有倾覆危险时,将信号传递给单片机,单片机控制电机工作,带动凸轮16转动,通过滚轮轴承21、U形连接件20将转动传递给滑轮轴19,再由滑轮轴19带动锁紧杆18转动,与锁紧件22张开,公共连接缆10即由锁紧杆18与锁紧件22之间脱出,由绷紧状态变为松弛状态,即可使拉住抛载长钩B6的两根连接缆9松弛,抛载长钩B6由于压载7作用首端下垂,同时抛载长钩A5由于失去抛载长钩B6的支撑,首端同时下垂,实现四点压载7应急抛载。
一种深海生态过程长期定点观测装置,包括着陆架即深海结构物框架、声学释放器、电池舱、自动脱钩装置、控制舱、ROV抓取把手、抛载机构、浮力球等。深海结构物框架分为三层;其中,铱星信标、声学多普勒流速剖面仪、光信标、超短基线应答器、浮力球、ROV抓取把手、安装在着陆架的上层位置。罗盘舱、温盐深传感器、导绳轮、二氧化碳传感器、甲烷传感器、控制舱、电池舱安装在着陆架的中层位置。照相机闪光灯组件、脚底护板、与压载安装在着陆架的底层位置。
使用浮力球阵列排布作为装置的浮力材料。
所述电池舱与控制舱均采用玻璃球耐压壳体封装结构,控制舱可以控制四个电池舱中的任意一个或几个为本装置提供能源。控制舱内设LED显示屏用于状态监测。四个电池舱在同一水平面、控制舱周围均匀设置。
自动脱钩装置由单片机控制,并与抛载机构连接,可实现定时抛载或在声学释放器失灵时作为抛载机构的备份。
所述ROV抓取把手安装在着陆架顶层四角,观测装置着陆后可由ROV机械手操作将本装置移动到指定位置进行观测。
抛载机构为深海结构物释放抛载系统,采用单点触发四点抛载的连杆装置。声学释放器与应急抛载装置均可触发抛载动作。
控制舱包括:开关电源模块,嵌入式控制器,串行通讯总线,继电器。
如图11、12所示,系统主要包括着陆架和科学负载。本体实现系统下潜和抛载上浮,并为科学负载提供安装基座、能源和信息交互接口。科学负载主要包括声学多普勒流速剖面仪,温盐深传感器,二氧化碳传感器,甲烷传感器,照相机及闪光灯,具备近海底环境参数测量及光学观测能力。
从实现的功能不同,本体又可分为运载子系统、控制子系统和能源子系统。如图13所示。
运载子系统是系统的运载与支撑平台,主要包括着陆架、浮球、抛载块等常载设备。常载设备包括电子罗盘、声学释放器水下单元、卫星定位信标、光信标及自动脱钩装置等,是观测系统正常工作所必须的设备。其中电子罗盘用于测量本装置下潜/上浮过程中的姿态信息;声学释放器水下单元在收到水面单元发出的回收信号时执行抛载动作;卫星定位电信标和光信标用于本体回收时的水面定位;自动脱钩装置由控制单元及执行机构组成,在系统异常情况下执行抛载动作。
控制子系统是系统的控制核心,主要包括主控制单元、扩展单元和能源管理单元。控制子系统管理各仪器设备的正常运行,并对传感器采集的数据进行存储。能源子系统包括能源管理单元和四个电池舱,为系统运行提供能源支撑。其中,控制舱可以通过继电器控制四个电池舱中的任意一个或几个为本装置提供能源,电池舱中具有漏水检测传感器,当检测到某个电池舱漏水时立即断开此电池舱与控制舱之间的连接。如图14所示。
科学负载可根据实际科学需求选择相应的探测仪器和采样装置,本实用新型装置主要面向深海热液区、冷泉区综合环境参数测量,搭载的科学传感器包括照相机及闪光灯、温盐深传感器、甲烷传感器、二氧化碳传感器、声学多普勒流速剖面仪等,为满足扩展探测需求,系统预留了三路扩展接口。部分科学传感器的能源由本装置提供,而温盐深传感器以及声学多普勒流速剖面仪自带能源。
本实用新型的工作原理为:
本装置具有两种工作模式,分别为水面调试模式和水下自主采集模式,工作在水面调试模式时嵌入式控制器,通过串行通讯总线电路接受水面上位机控制命令,对本装置的工作时间,采样频率等参数进行设置;工作在水下自主采集模式时嵌入式控制器,通过继电器控制传感器的开启和关闭,通过串行通讯总线电路接收科学传感器采集到的数据,并将采集到的数据存储到控制系统SD卡内,本装置完成水下作业返回至水面以后通过串行通讯总线电路将SD卡内的科学数据导出。
本装置的作业流程如图15所示。首先,根据科考需求选择观测装置作业区域,支持母船驶至作业区域后,根据探测的海底地形、海流剖面速度等数据选择合适的入水点。当母船在预定入水点位置附近停泊后,使用船载吊放设备将本装置吊放至入水点,装置入水后受重力作用下潜至海底,支持母船可通过其携带的声学信标其进行着陆点位置测算,若其偏离探测点,操作ROV寻找本装置并将本装置挪动至探测点,该装置开始水下自主采集模式。当完成预定时间的作业任务后,母船驶至着陆点附近,由声学释放器甲板单元发出回收信号,装置搭载的声学释放器水下单元受触发抛掉压载物,系统变为正浮力而上浮至水面。浮出水面后,搭载的卫星定位信标开启并与支持母船建立通信,报告出水位置。母船驶至装置出水位置,将系统回收。最后,科研人员在甲板上进行样品回收,并导出观测数据。
一种深海生态过程长期定点观测装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0