








专利摘要
本发明涉及一种超高速分幅相机系统及成像方法。包括电控系统及目标光源发出光信号的路径上依次设置的针孔板、分幅管组件及用于采集、记录并进行数据分析的图像采集模块。本发明提供了一种不用对微通道板和高压选通脉冲的性能做任何改进就可以使分幅相机的时间分辨提高到40ps,且制造简单,使用方便的超高速分幅相机系统及成像方法。
权利要求
1.一种超高速分幅相机系统,其特征在于:包括电控系统及目标光源发出光信号的路径上依次设置的针孔板、分幅管组件及用于采集、记录并进行数据分析的图像采集模块;所述分幅管组件与图像采集模块之间设置有荧光屏;还包括与分幅管组件连接的高压脉冲发生器;所述电控系统分别与高压脉冲发生器、分幅管组件、图像采集模块连接;
所述电控系统包括输入模块、选通模块、板压模块、屏压模块和控制模块;所述控制模块分别连接输入模块、选通模块、板压模块、屏压模块;
所述分幅管组件包括法兰盘,法兰盘一端设置有用于固定荧光屏的可伐环;所述荧光屏正上方设有通过线路板固连在法兰盘上的微通道板;所述线路板通过微通道板压环固连在法兰盘上;所述微通道板上设置有阴极微带线组;所述阴极微带线组包括第一阴极微带线、第二阴极微带线、第三阴极微带线、第四阴极微带线;所述线路板上设置有渐变线,渐变线的一端与输入模块连接,另一端与微通道板上的阴极微带线连接;
所述目标光源所产生的光信号通过针孔板成像在阴极微带线的不同位置,阴极微带线把光子通过光电阴极转换成光电子;当阴极微带线上没有加电压时,光电子就会被微通道板吸收而无增益输出;当在微通道板输入与输出面之间加电压时,在微通道形成加速电场,光电子在该电场作用下碰撞微通道板的通道壁,产生二次电子倍增,然后穿过微通道板,打在荧光屏上,形成可见光图像输出。
2.基于权利要求1所述的一种超高速分幅相机系统的一种超高速分幅相机成像方法,其特征在于:包括以下步骤:
1】目标光源产生的光通过针孔阵列板同时投影在光电阴极的不同位置并且产生光电子;
2】电控系统产生两路高精度同步、幅度2500V、脉宽180ps的快门脉冲和两路高精度同步、幅度2500V、脉宽220ps的快门脉冲;
3】宽度为180ps的脉冲分别与分幅管的第一和第三条微带线连接,宽度为220ps的脉冲分别与分幅管的第二和第四条微带线连接;
4】步骤2】所产生的4路快门脉冲从微带线阴极的一端向另一端传输,在微通道板两端形成加速电场,光电子在该电场作用下碰撞微通道板的通道壁,产生二次电子倍增,然后穿过微通道板,打在荧光屏上,使针孔板投在微带阴极上面的图像成像于荧光屏上;
5】图像采集模块采集荧光屏上的图像并且将图像数字化;
6】通过图像采集模块得到分幅图像。
3.根据权利要求2所述的一种超高速分幅相机成像方法,其特征在于:所述步骤6】包括以下步骤:
6.1读进原始探测器上所采集到的图像,根据图像的特点进行图像裁剪,将图像分成8个子图像;
6.2从8个子图像中选取相应的2个图像进行匹配;
6.3选用SIFT算法匹配图像,随机选取几个匹配点,由算法自行计算图像的特征点,然后用SIFT算法匹配图像,求出A1,所述A1为图像的偏移坐标;
6.4选用NCC算法匹配图像,求出A2,所述A2为图像的偏移坐标;
6.5根据A1、A2加权求和平均,得到平均的偏移量;
6.6根据步骤5】得出的偏移量对两幅图像进行差分,从而得到时间分辨40ps的分幅图像。
说明书
技术领域
本发明属于高速光电成像领域,涉及真空光电成像器件和图像处理方法,具体涉及一种超高速分幅相机系统及成像方法。
背景技术
X射线分幅相机是激光核聚变及激光等离子体物理研究的重要工具。由于激光等离子体的整个作用过程仅发生在数纳秒内,因而超快分幅成像技术便应运而生。X射线分幅相机用于观测惯性约束核聚变(ICF)实验过程中等离子体温度和密度随时间变化的二维形貌,在研究流体力学不稳定性,内爆动力学与压缩对称性研究和X射线背光照相研究等方面有着广泛的应用。
在ICF内爆动力学和界面诊断研究中,内爆过程的推进速度很快,在利用X射线分幅相机进行时间分辨二维成像测量时,为避免像的动态模糊,要求X射线分幅相机的曝光时间小于40ps。而现有MCP选通式分幅相机其时间分辨由于受到关键器件MCP微通道渡越时间的限制,极限曝光时间只有约60ps。
现有行波选通分幅成像技术一般采用四条微带型光电阴极,每条微带阴极需一路选通电脉冲输入,其主要缺点如下:
1)由于微通道板的孔径比较大,光电子的渡越时间较长,因此相机的曝光时间提高受到限制;
2)目前研制更小孔径、更薄厚度的微通道板技术上有一定的困难,所以无法通过改变通道板参数提高分幅相机的时间分辨率;
3)利用纯电子学方法产生脉宽为百皮秒的高压脉冲已达到半导体器件的极限速度,因而无法通过缩小电子快门的门宽提高时间分辨。
发明内容
为了解决背景技术中所提出的技术问题,本发明提出了一种超高速分幅相机系统,有效解决了现有分幅相机系统时间分辨无法满足实验需求的技术问题。
本发明的技术方案是:一种超高速分幅相机系统,其特殊之处在于:包括电控系统及目标光源发出光信号的路径上依次设置的针孔板、分幅管组件及用于采集、记录并进行数据分析的图像采集模块;上述分幅管组件与图像采集模块之间设置有荧光屏;还包括与分幅管组件连接的高压脉冲发生器;上述电控系统分别与高压脉冲发生器、分幅管组件、图像采集模块连接;
上述电控系统包括输入模块、选通模块、板压模块、屏压模块和控制模块;上述控制模块分别连接输入模块、选通模块、板压模块、屏压模块;
上述分幅管组件包括法兰盘,法兰盘一端设置有用于固定荧光屏的可伐环;上述荧光屏正上方设有通过线路板固连在法兰盘上的微通道板;上述线路板通过微通道板压环固连在法兰盘上;上述微通道板上设置有阴极微带线组;上述阴极微带线组包括第一阴极微带线、第二阴极微带线、第三阴极微带线、第四阴极微带线;上述线路板上设置有渐变线,渐变线的一端与输入模块连接,另一端与微通道板上的阴极微带线连接;
上述目标光源所产生的光信号通过针孔板成像在阴极微带线的不同位置,阴极微带线把光子通过光电阴极转换成光电子;当阴极微带线上没有加电压时,光电子就会被微通道板吸收而无增益输出;当在微通道板输入与输出面之间加电压时,在微通道形成加速电场,光电子在该电场作用下碰撞微通道板的通道壁,产生二次电子倍增,然后穿过微通道板,打在荧光屏上,形成可见光图像输出。
一种超高速分幅相机系统的一种超高速分幅相机成像方法,其特殊之处在于:包括以下步骤:
1】目标光源产生的光通过针孔阵列板同时投影在光电阴极的不同位置并且产生光电子;
2】电控系统产生两路高精度同步、幅度2500V、脉宽180ps的快门脉冲和两路高精度同步、幅度2500V、脉宽220ps的快门脉冲;
3】宽度为180ps的脉冲分别与分幅管的第一和第三条微带线连接,宽度为220ps的脉冲分别与分幅管的第二和第四条微带线连接;
4】步骤2】所产生的4路快门脉冲从微带线阴极的一端向另一端传输,在微通道板两端形成加速电场,光电子在该电场作用下碰撞微通道板的通道壁,产生二次电子倍增,然后穿过微通道板,打在荧光屏上,使针孔板投在微带阴极上面的图像成像于荧光屏上;
5】图像采集模块采集荧光屏上的图像并且将图像数字化;
6】通过图像采集模块得到分幅图像。
上述步骤6】包括以下步骤:
6.1读进原始探测器上所采集到的图像,根据图像的特点进行图像裁剪,将图像分成8个子图像;
6.2从8个子图像中选取相应的2个图像进行匹配;
6.3选用SIFT算法匹配图像,随机选取几个匹配点,由算法自行计算图像的特征点,然后用SIFT算法匹配图像,求出A1,所述A1为图像的偏移坐标;
6.4选用NCC算法匹配图像,求出A2,所述A2为图像的偏移坐标;
6.5根据A1、A2加权求和平均,得到平均的偏移量;
6.6根据步骤5】得出的偏移量对两幅图像进行差分,从而得到时间分辨40ps的分幅图像。
本发明专利拟采用曝光开始时刻相同、截止时刻不同的两种选通脉冲对两条微带阴极同时曝光,然后采用图像差分软件对这两条微带上的图像进行差分处理,从而获得曝光时间40ps的分幅图像。比如,选择幅度一致,相对晃动小于10ps,宽度分别为80ps和120ps的两路选通脉冲对两条微带进行同时曝光。因脉冲传输的速度相同,对于两条微带上对应的图像就可以做到曝光开始时刻相同而结束时刻不同,于是利用图像差分处理软件即可得到40ps时间分辨的多幅图像。本发明专利避免了MCP渡越时间和电子快门对曝光时间的限制,而且以目前4条微带的分幅管结构,仍然可以获得至少8幅图像,记录长度也完全能够满足目标物理事件300ps范围的要求。
本发明的优点:由于目前所用分幅相机的极限曝光时间只有60ps,无法满足实验需要,且目前无法通过改变微通道板和高压选通脉冲的性能使曝光时间提升。基于此种现状,我们提出了差分曝光法提高分幅相机时间分辨的方法。该方法的优点主要在于避免了微通道板和高压选通脉冲对分幅相机极限时间分辨的制约,通过同时成像和差分图像处理使分幅相机时间分辨提高到40ps。
附图说明
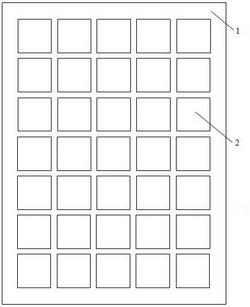
图1为本发明超高速分幅相机结构示意图;
图2为本发明超高速分幅相机工作原理;
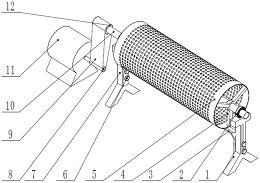
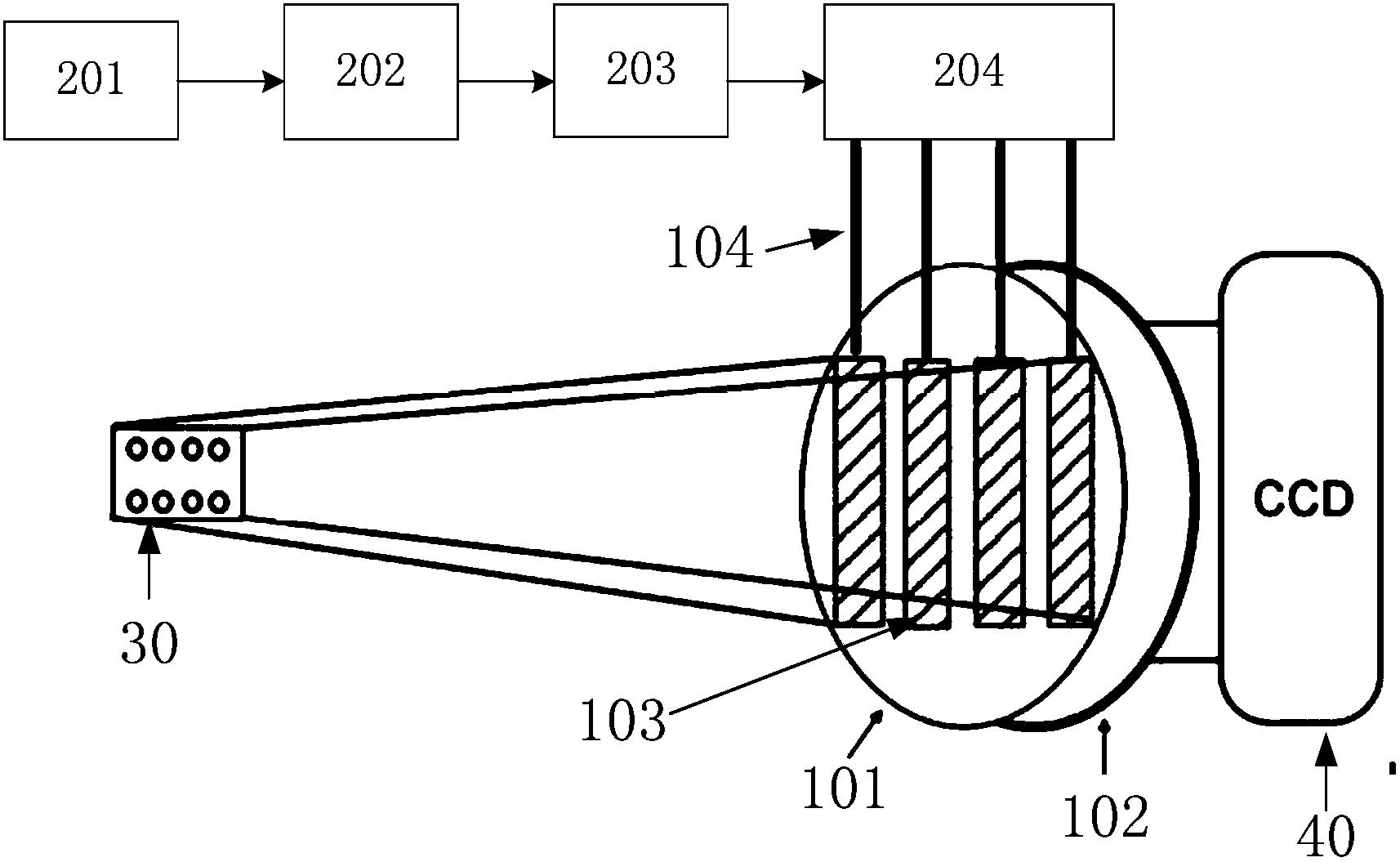
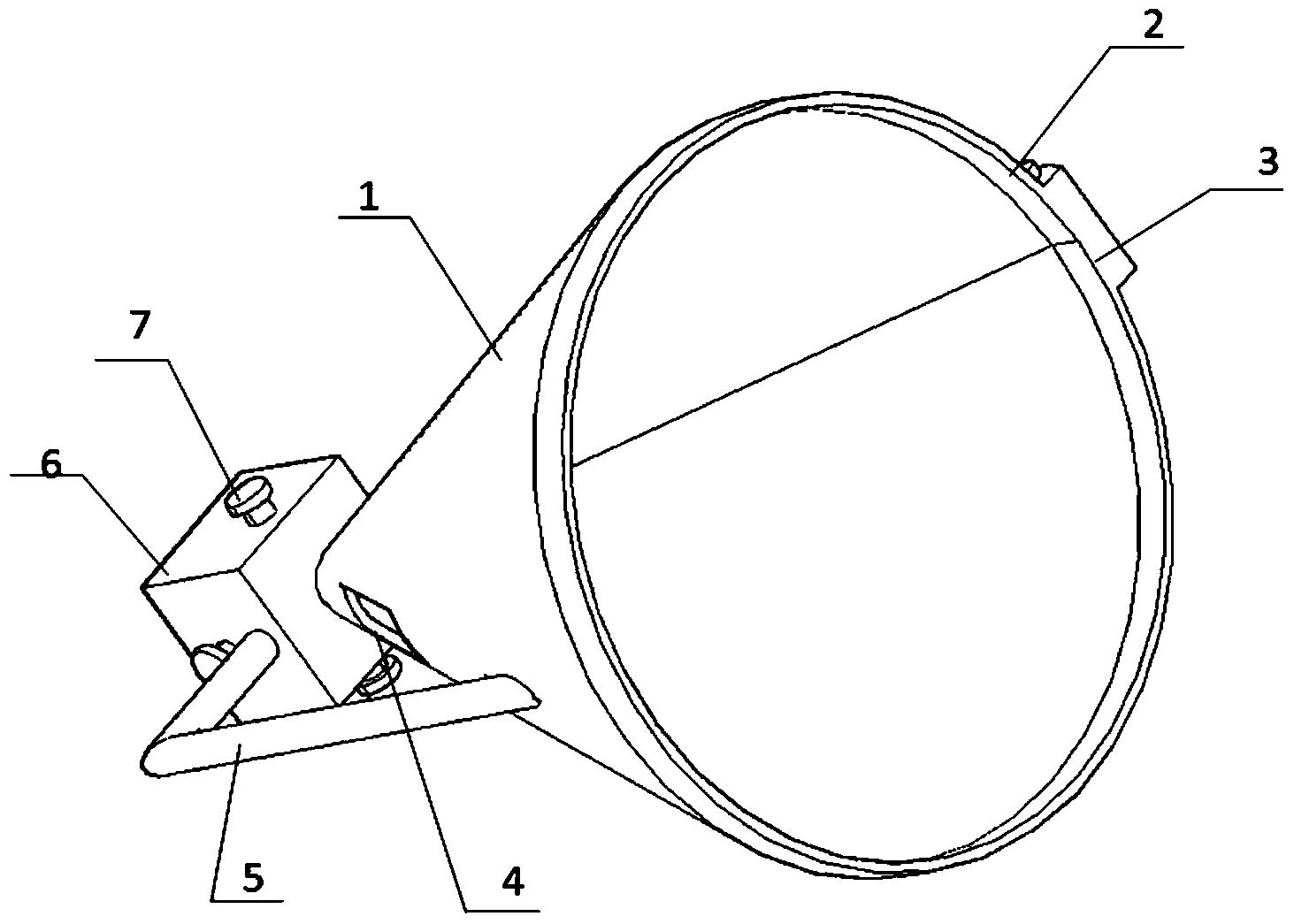
图3为本发明分幅变像管结构图;
图4为电控系统原理图;
图5为图像处理流程图;
其中0-目标光源、1-针孔板、2-同轴电缆线、3-阴极微带线组、4-荧光屏、5-高压脉冲发生器、6-法兰盘、7-微通道板压环、8-微通道板、9-可伐环、10-线路板。
具体实施方式
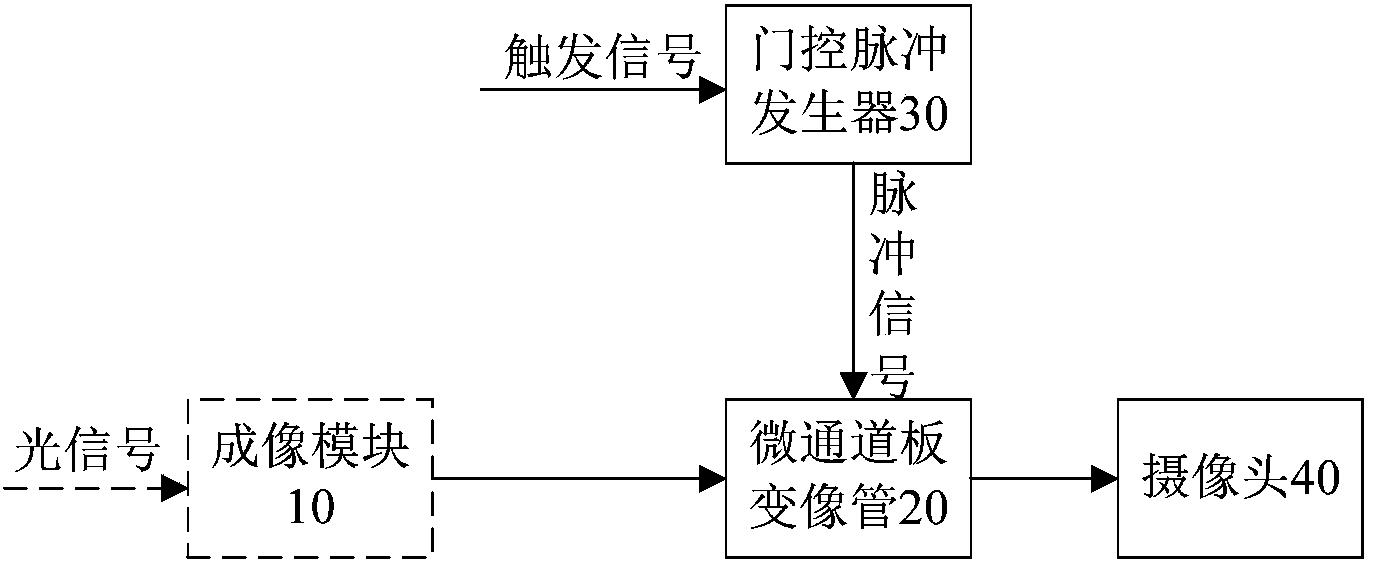
参见图1-5,一种超高速分幅相机系统,包括电控系统及目标光源0发出光信号的路径上依次设置的针孔板1、分幅管组件及用于采集、记录并进行数据分析的图像采集模块;分幅管组件与图像采集模块之间设置有荧光屏4;还包括与分幅管组件连接的高压脉冲发生器5;电控系统分别与高压脉冲发生器5、分幅管组件、图像采集模块连接;
电控系统包括输入模块、选通模块、板压模块、屏压模块和控制模块;上述控制模块分别连接输入模块、选通模块、板压模块、屏压模块;选通模块包含两种不同脉宽的选通脉冲;
分幅管组件包括法兰盘6,法兰盘6一端设置有用于固定荧光屏4的可伐环9;荧光屏4正上方设有通过线路板10固连在法兰盘6上的微通道板8;线路板10通过微通道板压环7固连在法兰盘6上;微通道板8上设置有阴极微带线组3;上述阴极微带线组包括第一阴极微带线、第二阴极微带线、第三阴极微带线、第四阴极微带线;上述线路板上设置有渐变线,渐变线的一端与输入模块连接,另一端与微通道板8上的阴极微带线连接;
目标光源所产生的光信号通过针孔板成像在阴极微带线的不同位置,阴极微带线把光子通过光电阴极转换成光电子;当阴极微带线上没有加电压时,光电子就会被微通道板吸收而无增益输出;当在微通道板输入与输出面之间加电压时,在微通道形成加速电场,光电子在该电场作用下碰撞微通道板的通道壁,产生二次电子倍增,然后穿过微通道板,打在荧光屏上,形成可见光图像输出。
一种超高速分幅相机系统的一种超高速分幅相机成像方法,其特殊之处在于:包括以下步骤:
1】目标光源产生的光通过针孔阵列板同时投影在光电阴极的不同位置并且产生光电子;
2】电控系统产生两路高精度同步、幅度2500V、脉宽180ps的快门脉冲和两路高精度同步、幅度2500V、脉宽220ps的快门脉冲;
3】宽度为180ps的脉冲分别与分幅管的第一和第三条微带线连接,宽度为220ps的脉冲分别与分幅管的第二和第四条微带线连接;
4】步骤2】所产生的4路快门脉冲从微带线阴极的一端向另一端传输,在微通道板两端形成加速电场,光电子在该电场作用下碰撞微通道板的通道壁,产生二次电子倍增,然后穿过微通道板,打在荧光屏上,使针孔板投在微带阴极上面的图像成像于荧光屏上;
5】图像采集模块采集荧光屏上的图像并且将图像数字化;
6】通过图像采集模块得到分幅图像。
上述步骤6】包括以下步骤:
6.1读进原始探测器上所采集到的图像,根据图像的特点进行图像裁剪,将图像分成8个子图像;
6.2从8个子图像中选取相应的2个图像进行匹配;
6.3选用SIFT算法匹配图像,随机选取几个匹配点,由算法自行计算图像的特征点,然后用SIFT算法匹配图像,求出A1,所述A1为图像的偏移坐标;
6.4选用NCC算法匹配图像,求出A2,所述A2为图像的偏移坐标;
6.5根据A1、A2加权求和平均,得到平均的偏移量;
6.6根据步骤5】得出的偏移量对两幅图像进行差分,从而得到时间分辨40ps的分幅图像。
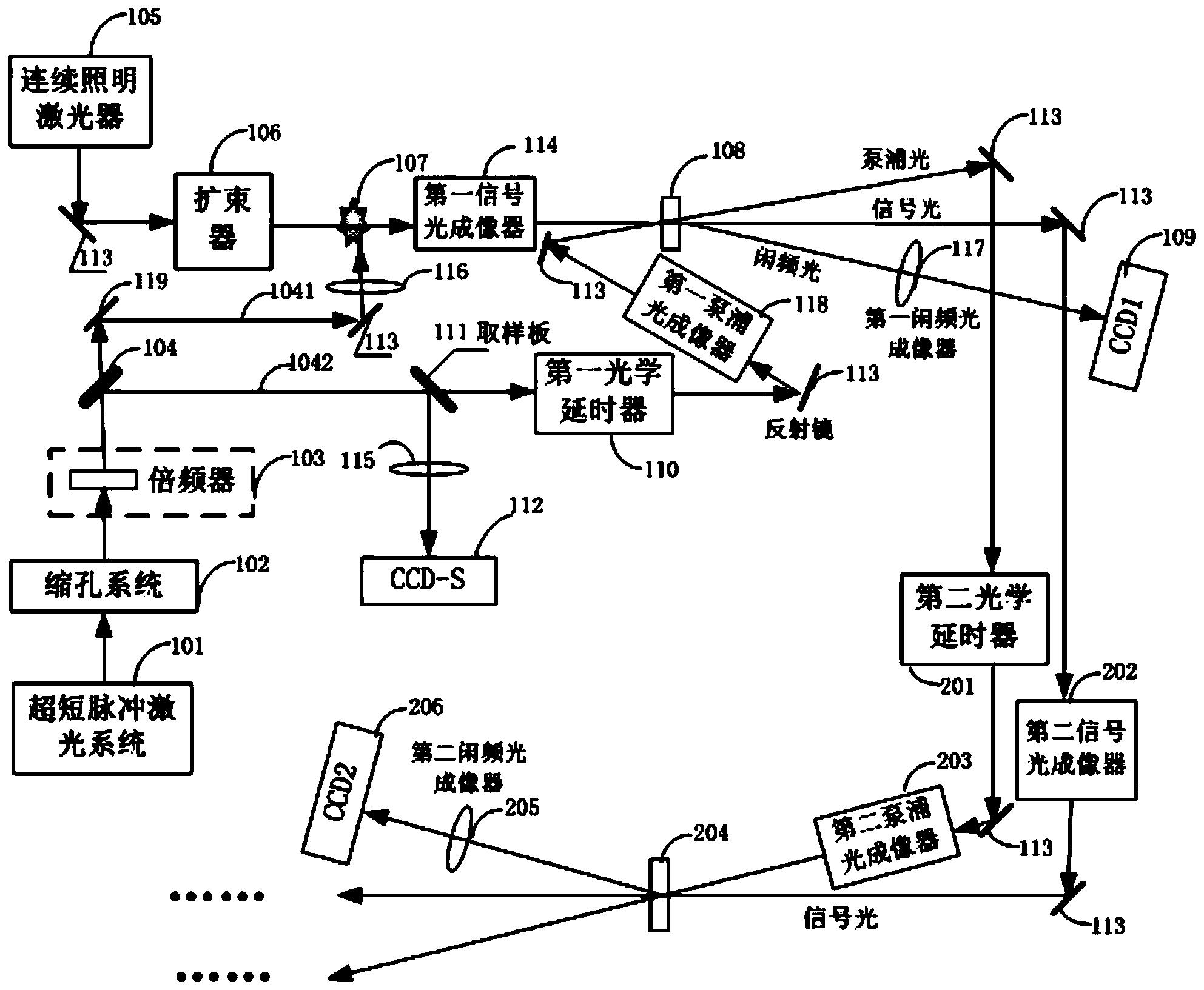
图1中,电控系统主要是产生电子快门脉冲、荧光屏电压及其他控制功能;分幅变像管主要是将照射在光电阴极上的X光进行成像;图像采集单元主要将分幅管所成的像进行采集、记录并进行分析和处理。
分幅管结构如图3所示,其主要组成部分为微通道板、法兰盘、荧光屏、光电阴极等。
系统工作时,目标光源0所产生的光通过针孔阵列板1同时投影在光电阴极的不同位置,光电阴极把光子转换成光电子,电控系统产生时间完全同步的两路幅度2500V、脉宽180ps的快门脉冲和两路幅度2500V、脉宽220ps的快门脉冲,宽度为180ps的脉冲分别与分幅管的第一和第三条微带连接,宽度为220ps的脉冲分别与分幅管的第二和第四条微带连接。当阴极微带线3上没有快门脉冲传输时,微通道板8两端不存在电场,光电子被微通道板吸收而无增益输出。当快门脉冲从微带阴极3的一端向另一端传输时针孔板1投在微带阴极3上面的图像被依次选通成像于荧光屏上。
其中第一、二条微带上加载的快门脉冲严格同步,第三、四条微带上加载的快门脉冲严格同步。因此,第一条和第二条微带所记录的图像是目标光源在同一时刻的成像,第三、四条微带所记录的图像是目标光源另一相同时刻的成像,而由于第一、三条微带所加载的快门脉冲宽度相同,而第二、第四条微带所加载的快门脉冲宽度相同,因此第一、第三条微带的曝光时间相通,而第二、第四条微带的曝光时间也相同。
第一、第二条微带上所成的目标像由于快门脉冲宽度不同,所以曝光时间不同。将两条微带上所成的两幅图像采用归一化互相关算法和尺度不变特征变换算法进行图像匹配,从而保证两幅图像同一坐标处所对应的是目标图像的同一点。然后根据图5所示图像处理流程对图像进行处理:
①读进原始探测器上所采集到的图像,根据图像的特点进行图像裁剪,将图像分成8个子图像。
②从8个子图像中选取相应的2个图像进行匹配。
③选用SIFT算法(尺度不变特征变换算法)匹配图像,可以选取几个匹配点,也可以由算法自行计算图像的特征点,然后用SIFT算法匹配图像,求出图像的偏移坐标。
④选用NCC算法(归一化互相关算法)匹配图像,求出图像的偏移坐标。
⑤根据两种算法求出的偏移坐标加权求和平均,得到平均的偏移量
⑥根据步骤5得出的偏移量对两幅图像进行差分,从而得到最终结果。
本发明专利的核心就是在我们现在成熟的技术基础上,在目前器件和技术皆难以突破的情况下实现分幅相机时间分辨率的提高,从而满足惯性约束核聚变精密测量的需求。
一种超高速分幅相机系统及成像方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0