





专利摘要
本发明涉及一种转镜分幅相机的暗箱,包括箱体和设置在箱体内的转镜、中继透镜阵列、出瞳光阑阵列、记录像面,从箱体外部导入的二次像I2成像在转镜处并经转镜镜像后经过出瞳光阑和中继透镜在记录像面上形成最终像;箱体上设置的孔径光阑的像经过转镜成在出瞳光阑处,各个出瞳光阑的中心设置在以第一Pascal蜗线为准线的柱面上。通过将各个出瞳光阑的中心设置在以第一Pascal蜗线为准线的柱面上,从而实现对出瞳光阑阵列的等速扫描,保证了摄影频率的均匀性。本发明还进一步地揭露了将中继透镜阵列中每个中继透镜的主点和记录像面分别设置在以第二、三Pascal蜗线为准线的柱面上的技术方案,消除了现有技术中的原理误差,提高了摄影机的分辨率。
说明书
技术领域【技术领域】
本发明涉及超高速摄影技术,更具体地说,涉及一种无原理误差的转镜分幅相机暗箱。
技术背景【背景技术】
高速摄影仪器是人眼时间分辨能力的延伸,能够实现瞬态过程中时空信息的记录,从而为瞬态过程的分析研究提供有力工具。在研究爆轰、聚变、放电、高速燃烧、强激光作用物质效应、非稳态涡流、细观和微观动力学效应等领域的超快过程中通常需要微秒和亚微秒时间分辨率的高速摄影仪器。在满足这种要求的各类高速摄影仪器中,转镜分幅相机具有大画幅尺寸、多画幅数、高空间分辨率、摄影频率范围宽等特点,可承担104~107fps(幅/秒)超高速摄影频段中大部分超快过程的研究任务。因此,超高速摄影研究领域的注意点在从转镜型转向变像管型和固体成像器件型之后,又有重新回到转镜分幅相机的趋势,这种分幅相机一直是超高速摄影研究的重点(SPIE,2003,Vol.4948:330~335;SPIE,2007,Vol.6279:62791U-1~62791U-9)。
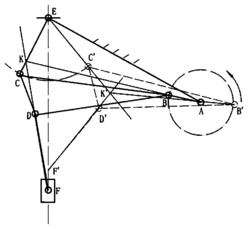
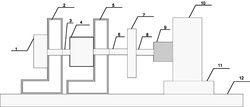
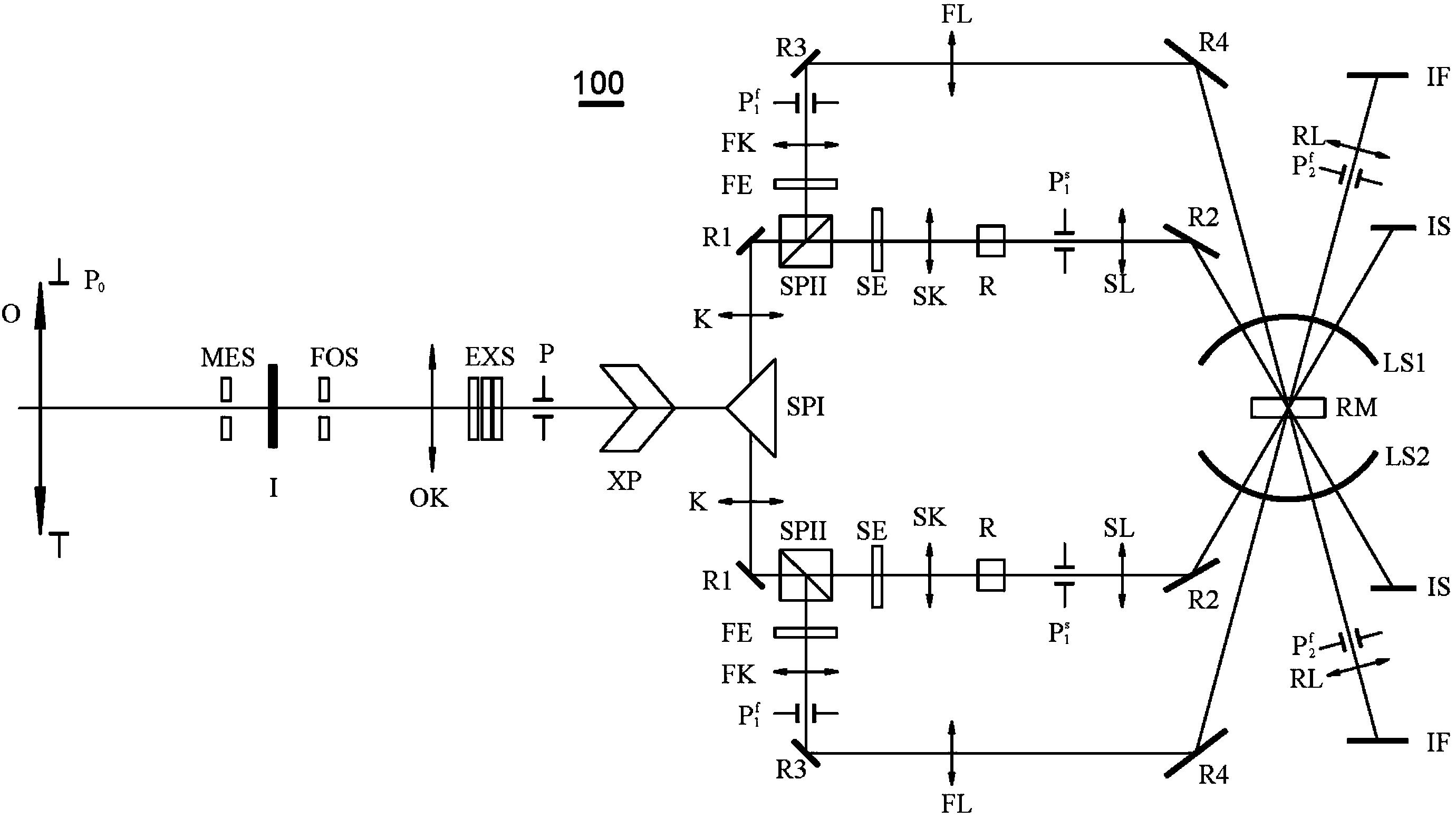
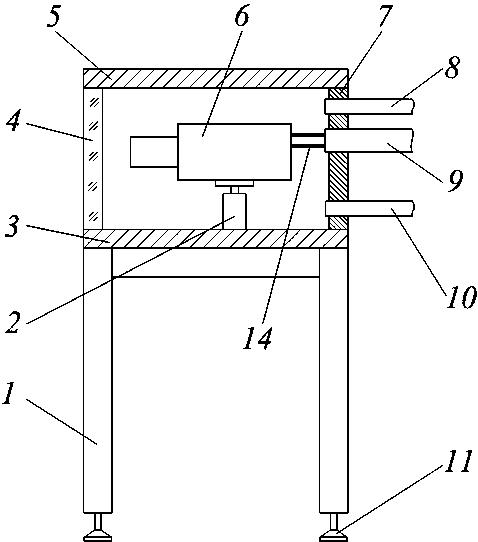
现有转镜分幅相机暗箱的结构设计均建立在Miller原理之上,如图1所示,依照该理论构造的转镜分幅相机暗箱通常包括箱体和设置在箱体内的转镜4、中继透镜阵列5、记录像面6。暗箱外的物镜1捕捉到的一次像I1经目镜2和场镜3后形成二次像I2,通过调整场镜3的位置,使得二次像I2正好在转镜4附近某确定位置;二次像I2经转镜4镜像后得到的镜像像I2′,二次像的镜像像I2′透过中继透镜阵列5在记录像面6上形成最终像I3′。二次像的镜像像I2′与记录像面的最终像I3′通过相应的中继透镜5′形成光学共轭关系。
为了实现曝光和分幅的功能,在暗箱中设置了光学快门,具体如图1所示,在目镜2和场镜3之间设置有孔径光阑Qa,中继透镜阵列由多个中继透镜5′阵列而成,每个中继透镜5′上设有出瞳光阑Qe,形成出瞳光阑阵列8。设置孔径光阑Qa经过场镜3、转镜4和透明玻璃球罩12后成像Qa′在出瞳光阑Qe上。随着转镜4扫描将孔径光阑的像Qa′依次遍历各个出瞳光阑Qe时,使得各个出瞳光阑Qe依次打开,形成光学快门,相应的中继透镜5′把镜像像I2′的最终像I3′最终记录在记录像面6上,同时实现依次曝光和分幅二种功能。
长期以来,人们对中继透镜及其出瞳光阑所在曲面和记录像面进行了深入的研究,通常使用代替圆的设计理论(SPIE Optical Engineering Press,1997,Rotating Mirror Streak and Framing Cameras;光子学报,2004,Vol.33,No.6:739~742)来构造这两个曲面。
由于转镜4有一定的半厚r,转镜4匀速旋转扫描时,二次像I2在转镜4上的反射点T的位置产生连续变化,使得孔径光阑Qa的像Qa′的轨迹形成Pascal蜗线;同样二次像I2在转镜处的镜像I2′经中继透镜后的成像I3′实际的成像位置的轨迹也是Pascal蜗线。因此,上述基于代替圆的设计理论构造的转镜分幅相机存在多种原理误差:(1)因中继透镜阵列所在的曲面为代替圆曲面,而该曲面与实际成像的Pascal蜗线曲面不一致造成像点的离焦误差,会增加成像模糊量,降低成像分辨率;(2)在上述光学快门中,由于出瞳光阑阵列的轨迹设计成代替圆,使得转镜匀速转动时在出瞳光阑阵列所在的曲面上不能实现等速扫描,由此导致摄影频率的不均匀性,在大工作角情况下会造成非常大的时基判读误差;(3)当中继透镜所在曲面设计成代替圆后,通过中继透镜及其出瞳的主光线与相应的反射光轴不同轴,导致中继透镜的成像误差,会使整机摄影分辨率下降。
现有技术中按照不同的设计要求,上述的代替圆设计理论又可分为离焦设计理论、等速设计理论、共轴设计理论,分别对应上述三种缺陷。这些设计理论都只能减少某一方面的原理误差,只能将某一方面的原理误差最小化;而且任何两种设计理论都不能同时在一个系统中实现,无法避免上述三种缺陷而只能根据系统的具体要求给出最佳的设计(光子学报,2004,Vol.33,No.6:739~742)。
发明内容【发明内容】
本发明要解决的技术问题在于,针对现有技术中转镜分幅相机的暗箱不能实现等速扫描出瞳光阑阵列,由此导致摄影频率的不均匀性的缺陷,提供一种无原理误差的转镜分幅相机的暗箱,能够使得转镜匀速旋转时能够在该出瞳阵列上实现等速扫描,从而保证了摄影频率的均匀性。
本发明解决其技术问题所采用的技术方案是:构造一种转镜分幅相机的暗箱,包括箱体和设置在箱体内的转镜、中继透镜阵列、对应中继透镜阵列设置的出瞳光阑阵列、记录像面,从所述箱体外部导入的二次像成像在转镜处并经转镜镜像后经过出瞳光阑和中继透镜在记录像面上形成最终像,所述箱体上设有控制成像光束口径的孔径光阑,所述孔径光阑的像经过转镜成在所述出瞳光阑阵列的出瞳光阑处,所述出瞳光阑阵列中各个出瞳光阑的中心设置在以第一Pascal蜗线为准线的柱面上。
在本发明所述的转镜分幅相机的暗箱中,在垂直于转镜旋转轴的平面内以二次像导入方向为x轴的平面坐标系中,所述第一Pascal蜗线的轨迹方程如下:
其中,(x0,y0)为转镜的旋转中心坐标;(-qe,0)为所述孔径光阑的中心经过场镜成像后的像点坐标;(xe,ye)为所述出瞳光阑的中心坐标;r为转镜的半厚; 是转镜以垂直x轴方向为初始位置的即时转角。
在本发明所述的转镜分幅相机的暗箱中,所述记录像面设置在以第三Pascal蜗线为准线的柱面上。
在本发明所述的转镜分幅相机的暗箱中,在垂直转镜旋转轴的平面内以二次像进入方向为x轴的平面坐标系中,所述第三Pascal蜗线的轨迹方程如下:
其中,(x0,y0)为转镜的中心坐标;(-qf,0)为最终像设计点的中心坐标,所述最终像设计点是在设定没有转镜的情况下根据光学系统选定的设计点;(xf,yf)为所述记录像面中心的坐标;r为转镜的半厚; 是转镜以垂直x轴方向为初始位置的即时转角。
在本发明所述的转镜分幅相机的暗箱中,所述中继透镜阵列中每个中继透镜的主点设置在以第二Pascal蜗线为准线的柱面上。
在本发明所述的转镜分幅相机的暗箱中,在垂直转镜旋转轴的平面内以二次像进入方向为x轴的平面坐标系中,所述中继透镜主点轨迹所在第二Pascal蜗线的轨迹方程如下:
其中,(x0,y0)为转镜的中心坐标;(-qH,0)为中继透镜设计点的坐标,所述中继透镜设计点是满足在设定没有转镜的情况下二次像直接经过中继透镜后聚焦成像在最终像设计点时所确定中继透镜的主点位置;(xH,yH)为所述中继透镜主点的坐标;r为转镜的半厚; 是转镜以垂直x轴方向为初始位置的即时转角。
在本发明所述的转镜分幅相机的暗箱中,在所述转镜旋转时,二次像经过转镜上的反射点反射至中继透镜阵列中的一个中继透镜上,设置每个中继透镜的光轴通过与其对应的反射点。
在本发明所述的转镜分幅相机的暗箱中,所述箱体内设有排镜架,所述排镜架上对应所述中继透镜阵列中的每个中继透镜设有一个滑槽,所述中继透镜在对应的滑槽内沿该中继透镜光轴方向可滑动微调。
在本发明所述的转镜分幅相机的暗箱中,所述出瞳光阑阵列开设在出瞳光阑片上,所述出瞳光阑片固定在排镜架的内侧表面上。
在本发明所述的转镜分幅相机的暗箱中,所述转镜设置在真空透明玻璃球罩内,所述真空透明玻璃球罩设置在所述箱体内
所述转镜设置在真空透明玻璃球罩内,所述真空透明玻璃球罩设置在所述箱体内。
实施本发明的转镜分幅相机的暗箱,具有以下有益效果:通过设置转镜分幅相机的暗箱包括箱体,在箱体内设置转镜、中继透镜阵列、对应中继透镜阵列设置的出瞳光阑阵列、记录像面,从外部经物镜、目镜和场镜等镜头组导入的二次像经过转镜镜像后再经过中继透镜阵列,最终成像在记录像面上;在箱体上设置有孔径光阑,用于控制成像光束的口径;设置孔径光阑与出瞳光阑光学共轭,使得孔径光阑的像和出瞳光阑共同形成光学快门,在记录像面上实现曝光和分幅的功能。由于转镜存在一定的厚度,在转镜匀速旋转扫描时,入射光线的方向不变,使得入射光线在转镜上的反射点连续变化,这使得孔径光阑在出瞳光阑处的共轭像点的轨迹为Pascal蜗线,通过将出瞳光阑阵列中各个出瞳光阑的中心设置在以第一Pascal蜗线为准线的柱面上,使得每个出瞳光阑均位于共轭像点上,进而使得出瞳光阑阵列所在的曲面与实际的共轭像点轨迹重合,从而在转镜匀速旋转时能够实现对出瞳光阑阵列的等速扫描,保证了摄影频率的均匀性,提高了摄影机的判读时间精度。尤其在大工作角情况下可减小时基判读误差。
更进一步地将记录像面设置在以第三Pascal蜗线为准线的柱面上,使得最终的成像能够准确落到记录像面上,从而避免了像点离焦的原理误差,从而提高了摄影机的分辨率。
更进一步地将中继透镜阵列中每个中继透镜的主点设置在以第二Pascal蜗线为准线的柱面上,避免了现有技术中因中继透镜阵列用代替圆替代而存在的像点离焦的问题,使得像点能够准确地聚焦在记录像面上,从而进一步提高了摄像时的分辨率。另外,在所述转镜旋转时,二次像经过转镜上的反射点反射至中继透镜阵列中的每一个中继透镜上,设置每个中继透镜的光轴通过与其对应的反射点,使得每个中继透镜的光轴和与其对应的反射光线的主光线重合,避免了现有技术中的不同轴造成的成像误差,从而进一步提高了摄像时的分辨率。
更进一步地,可在箱体内设置排镜架,将中继透镜阵列中的每个中继透镜均设置在排镜架的滑槽内,使得整个暗箱的结构更为紧凑。同时设置中继透镜在对应的滑槽内沿朝向所述转镜上与该中继透镜对应反射点的方向上可滑动,使得中继透镜在其光轴的方向上可微量调节,从而可以很方便的将每个中继透镜的主点调节至以第二Pascal蜗线为准线的同一柱面上,方便整个箱体的安装调试。另外,还可在箱体内设置两排排镜架,将排镜架对称设置在转镜两侧(也可不对称设置),在箱体内形成了两组光学系统、两个摄影记录区域,从而实现等待型摄影记录。所谓等待型摄影记录是指两个摄影区域能够连续交替进行摄影记录,一直在等待着记录,而对被摄影目标的触发时间始点要求不高,同时也能够获得更多的画幅数。
下面将结合附图及实施例对本发明作进一步说明。
附图说明【附图说明】
图1是转镜分幅相机的暗箱的原理示意图;
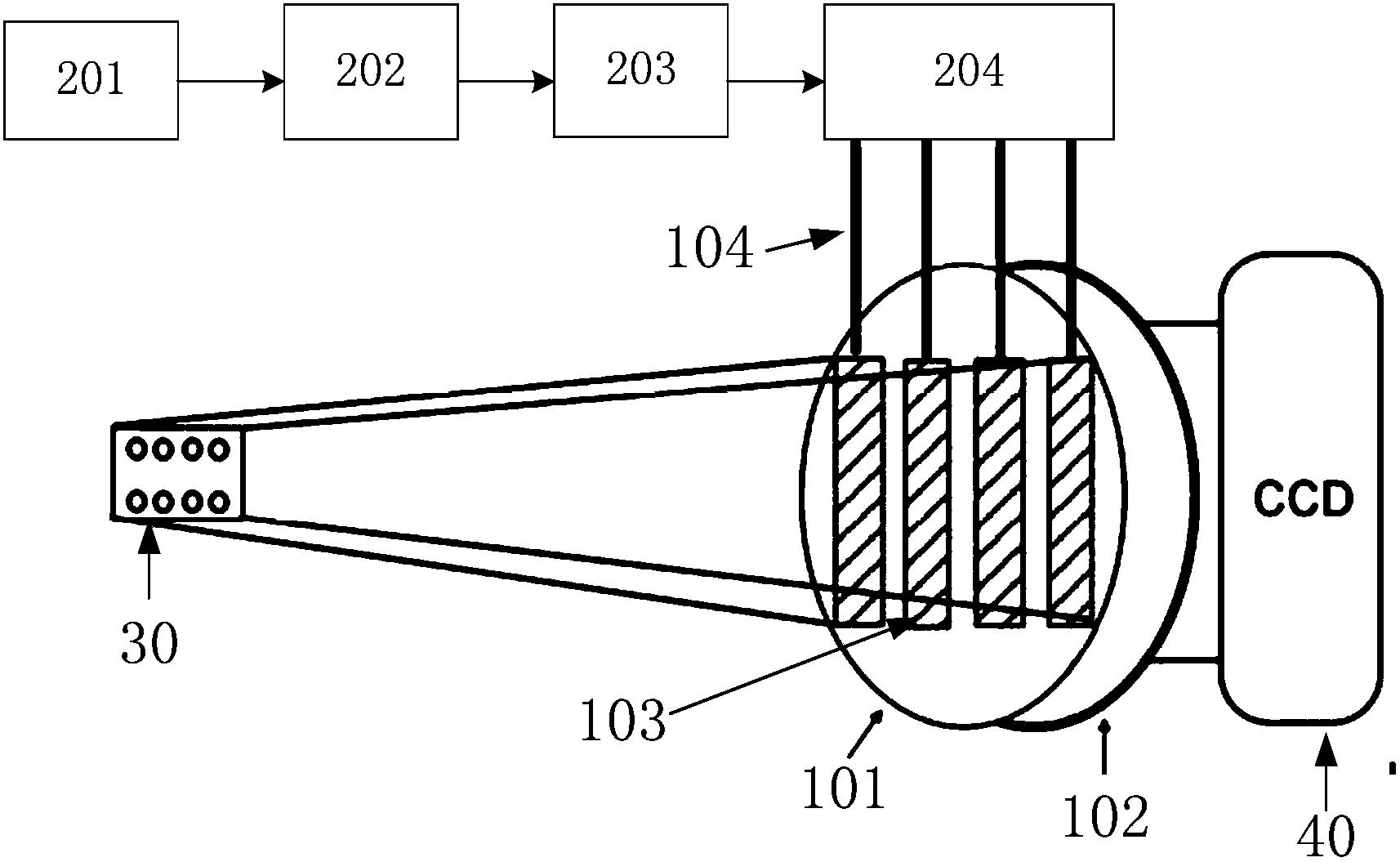
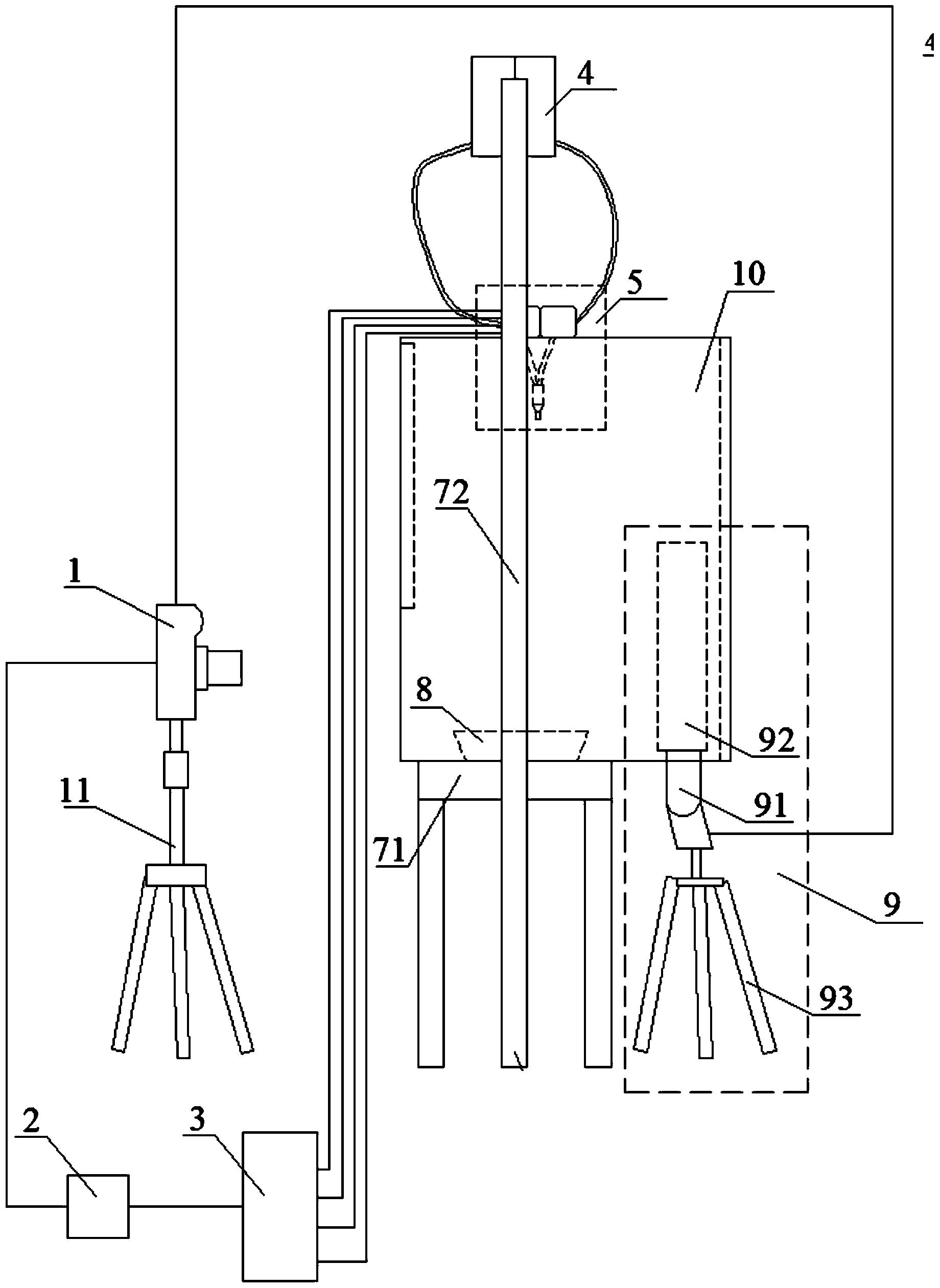
图2是本发明所述转镜分幅相机的暗箱的原理结构示意图;
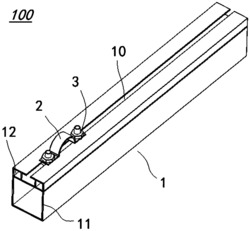
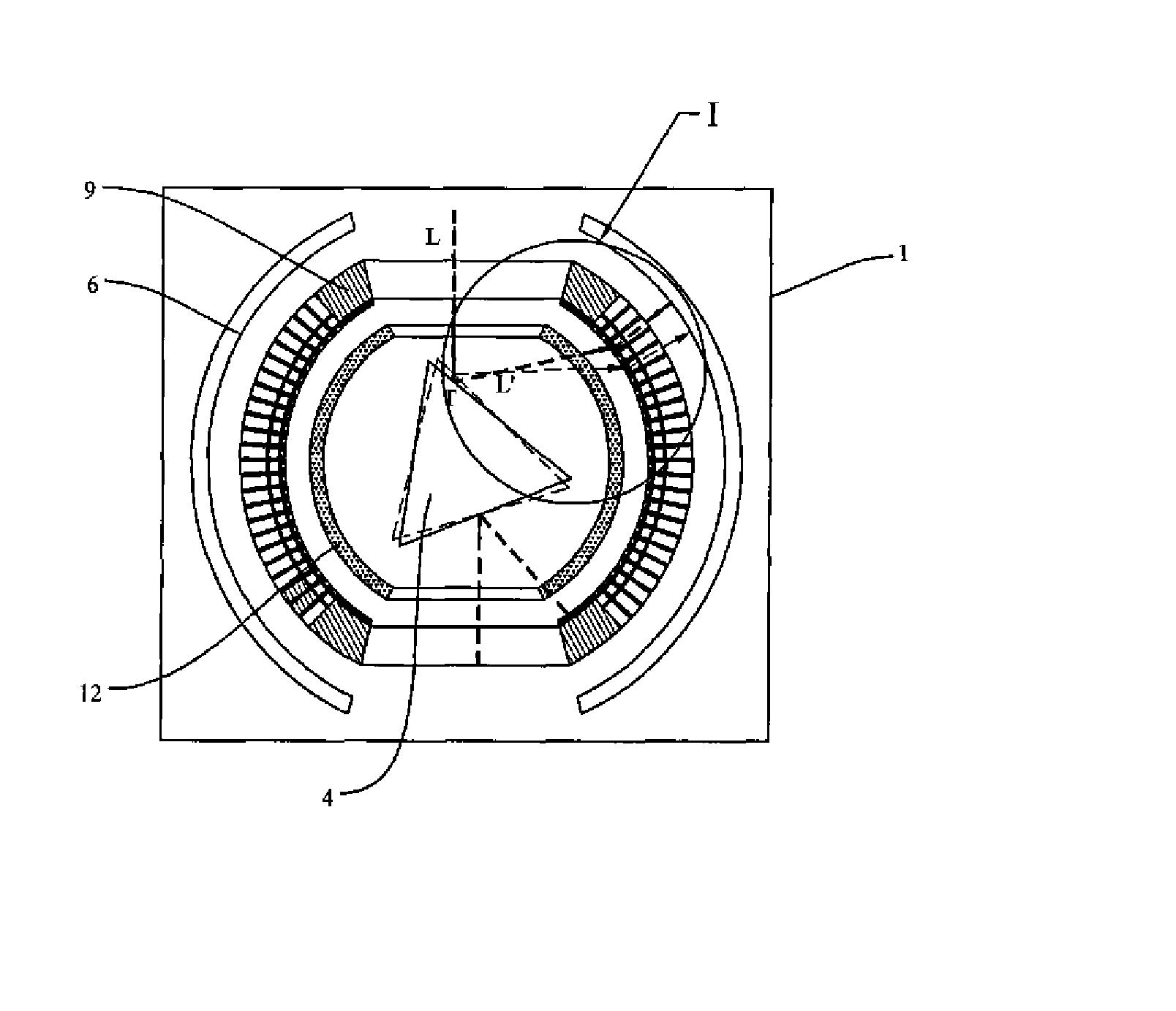
图3是图2的I部放大图。
具体实施方式【具体实施方式】
如图1所示,基于Miller理论构造的转镜分幅相机的暗箱通常包括箱体7和设置在箱体7内的转镜4、中继透镜阵列5和记录像面6,中继透镜阵列5由多个中继透镜5′阵列而成,每个中继透镜5′上设有出瞳光阑Qe,各个出瞳光阑Qe形成出瞳光阑阵列8。暗箱外的镜头组捕捉到的像经过暗箱入口处设置的孔径光阑Qa进入到箱体7内,镜头组可包括用于形成一次像的物镜1和形成二次像I2的目镜2和场镜3,孔径光阑Qa用来控制成像光束的口径。
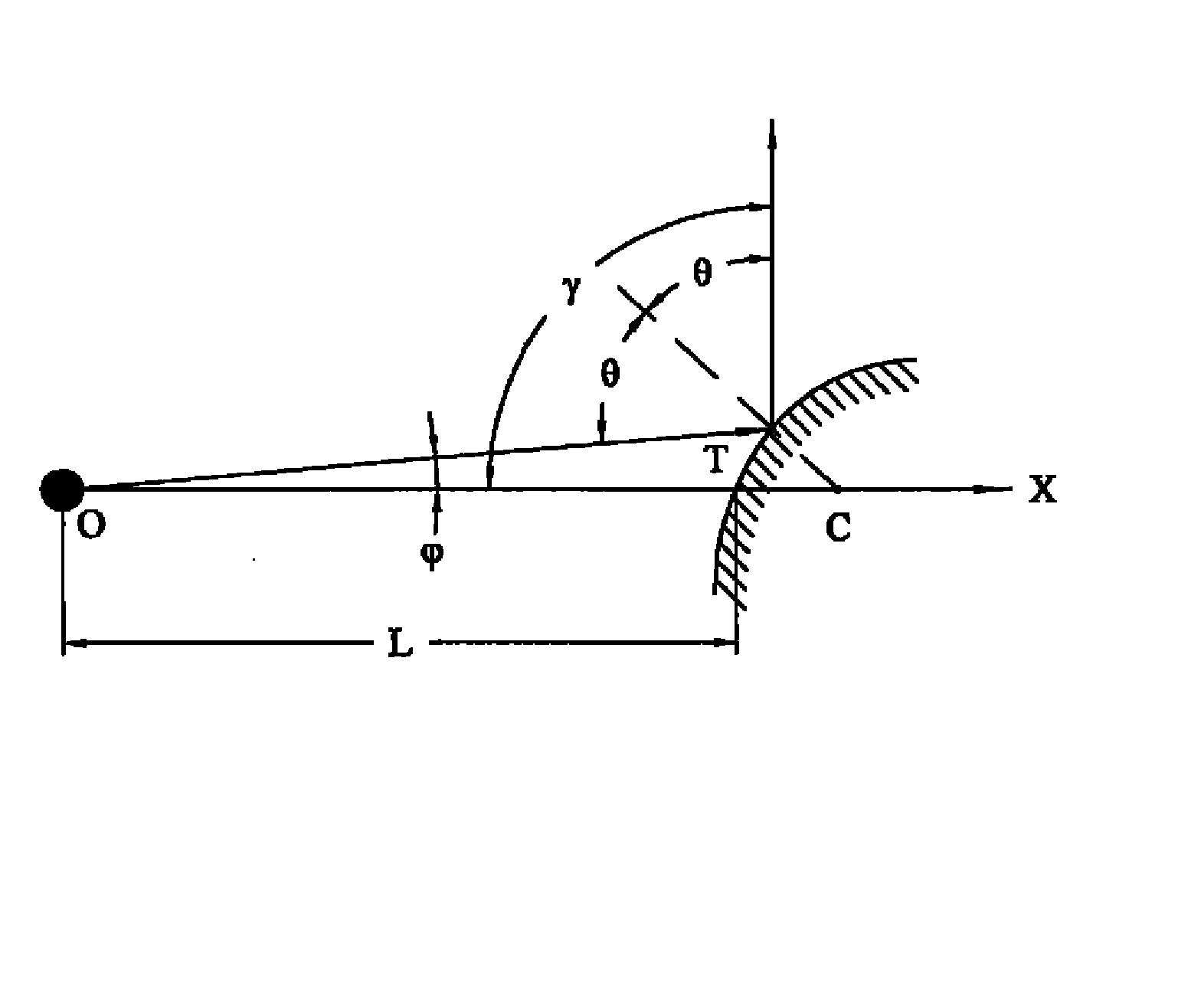
在垂直转镜旋转中心的平面内以二次像I2导入的方向为x轴建立平面坐标系。其中转镜4的旋转中心O的坐标为(x0,y0),转镜4的内切圆半径即为转镜的半厚r;以转镜4的一个反射面与x轴垂直时的位置为转镜4的初始位置,当转镜4匀速旋转一定时间后,该反射面转过一定的旋转角度 物镜1捕捉到的一次像I1经目镜2和场镜3后形成二次像I2,二次像I2经转镜4镜像后形成二次像的镜像I2′,该镜像I2′透过出瞳光阑Qe和相应的中继透镜5′后在记录像面6上形成最终像I3′。根据转镜分幅相机原理,转镜分幅相机设计中必须遵循以下二点:(1)孔径光阑Qa经场镜3、转镜4和球罩12后所成的像Qa′与出瞳光阑Qe重合;(2)成像在转镜4镜面附近的二次像的镜像I2′和成像在记录像面的最终像I3′通过相应的中继透镜成光学共轭关系。随着转镜4旋转,孔径光阑的像Qa′依次遍历出瞳光阑阵列中的各个出瞳光阑Qe,使得各个出瞳光阑Qe依次打开,从而由对应的中继透镜5′对镜像I2′产生最终像I3′并被记录在记录像面6上。
在本发明所述的转镜分幅相机的暗箱的优选实施例中,同样包括上述结构,不同之处在于引入了三个柱面,分别为记录像面6、中继透镜阵列中各个中继透镜主点所在柱面P5、出瞳光阑中心点所在柱面P8,将这三个柱面均设置为以Pascal蜗线为准线的柱面。
在本优选实施例中,沿x轴的入射光线L经过物镜1、目镜2和场镜3后在转镜4镜面的反射点T(ε,0)处反射形成主反射光L′。根据反射定律,该转镜分幅相机的镜面变换方程为:
(1)
其中物点的坐标为(x,y),物点经转镜4镜面反射的共轭像点的坐标为(x′,y′)。在转镜匀速旋转时,对应不同的时刻,反射点T的坐标不同,同时转镜的即时转角 也不同,如图所示不同时刻的入射光线L1和L2经转镜反射后形成不同方向的两束主反射光L1′和L2′,穿过出瞳光阑阵列中的不同出瞳光阑后再经中继透镜阵列中的不同中继透镜聚焦成像在记录像面上,因此共轭像点的坐标是连续变化的高次曲线。在本优选实施例中,由于入射光线L始终沿x轴入射且转镜的反射面为平面,转镜有一定的厚度,因而共轭像点的轨迹实际应为Pascal蜗线。
将出瞳光阑阵列中各个出瞳光阑Qe的中心设置在以第一Pascal蜗线为准线的柱面上,即将出瞳光阑中心点所在柱面P8设置为第一Pascal蜗线为准线的柱面,使得孔径光阑Qa在任意时刻均能和其对应的出瞳光阑Qe形成光学共轭。
如图2、3所示,基于转镜分幅相机原理,在转镜的即时转角为 时,需要设置出瞳光阑Qe与孔径光阑Qa经过场镜、转镜和球罩形成光学共轭关系,即出瞳光阑Qe应该设置在此时孔径光阑的像Qa′的位置。虽然入射光线L始终从同一方向入射,但由于转镜4在不断旋转致使孔径光阑的像Qa′连续扫描的。如图2所示,(-qe,0),为出瞳光阑的中心经转镜镜像前的像点坐标,即为孔径光阑Qa的中心经过场镜所成的像点坐标,可根据由物镜、目镜、场镜等组成的光学系统的参数以及孔径光阑在光学系统中的位置参数计算获得该像点坐标。将该像点坐标代入式(1)中,即可获得第一Pascal蜗线的轨迹方程:
(2)
转镜旋转所导致的出瞳中心扫描速度为
如图2、3所示,在本优选实施例中,将记录像面6设置为以第三Pascal蜗线为准线的柱面上。为了计算方便,在垂直转镜4旋转中心的平面内以二次像I2进入方向为x轴的平面坐标系中,在x轴上设定最终像设计点I3,该最终像设计点I3是在没有转镜的情况下根据光学系统选定的设计点,即在没有转镜的情况下,二次像I2直接经过设置在x轴上的中继透镜后聚焦成像的像点位置,该位置可根据光学系统中的各参数计算获得该像点位置的范围;具体可结合箱体的结构尺寸和中继透镜的放大率等因素选定一个设计值,从而确定该最终像设计点的坐标值(-qf,0);将该坐标代入式(1)中即可获得第三Pascal蜗线的轨迹方程为:
(3)
其中,(x0,y0)为转镜4的中心坐标;(-qf,0)为最终像设计点的坐标值;(xf,yf)为在暗箱中实际设置的所述记录像面6的坐标;r为转镜的半厚; 是转镜以垂直x轴方向为初始位置的即时转角。通过将记录像面6设置在以第三Pascal蜗线为准线的柱面上,使得最终的成像I3′能够准确落到记录像面6上,从而避免了像点离焦的原理误差,从而提高了摄影机的分辨率。
如图2、3所示,二次像I2经过转镜上的反射点T反射至中继透镜阵列中的一个中继透镜5′上。在转镜4旋转时,反射点T在转镜上的位置不断变化,对应的反射角也在连续变化,使得不同时刻,反射光线L′只通过中继透镜阵列中的一个中继透镜5′。在本优选实施例中,优选设置每个中继透镜5′的光轴通过与其对应的反射点T,使得每个中继透镜5′的光轴和与其对应的反射光线的主光线L′重合,避免了现有技术中的成像误差,从而进一步提高了摄像时的分辨率。
如图2所示,在本优选实施例中,将中继透镜阵列中每个中继透镜5′的主点H设置在以第二Pascal蜗线为准线的柱面上,即中继透镜主点所在平面P5为以第二Pascal蜗线为准线的柱面上。为了计算方便,在垂直转镜4旋转中心的平面内以二次像I2进入方向为x轴的平面坐标系中,在x轴上设定中继透镜设计点H′,该中继透镜设计点H′是在没有转镜的情况下根据光学系统确定的设计点;即在没有转镜的情况下,二次像I2直接经过设置在中继透镜设计点的中继透镜后成像,并为了满足能够聚焦成像在最终像设计点I3处而确定的中继透镜设计点。可根据光学系统中的各参数以及选定的最终像设计点坐标计算获得该中继透镜设计点H′的坐标(-qH,0),将该点坐标代入式(1)中可获得第二Pascal蜗线的轨迹方程:
其中,(xH,yH)为在暗箱中实际设置的中继透镜主点H的坐标,(x0,y0)为转镜的中心坐标;r为转镜的半厚; 是转镜以垂直x轴方向为初始位置的即时转角。通过将中继透镜阵列中每个中继透镜的主点H设置在以第二Pascal蜗线为准线的柱面上,使得二次像的镜像I2′能够准确地被中继透镜5′聚焦在记录像面6上,从而进一步提高了摄像时的分辨率。
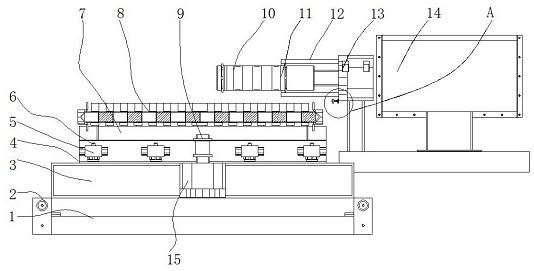
图2、3为本发明所述转镜分幅相机的暗箱的结构示意图,为了方便装调,还可在箱体7内设置排镜架9用于将上述中继透镜阵列中的每个中继透镜固定在箱体7内。具体的,根据要求可在排镜架9上对应每个中继透镜设置滑槽10,使得中继透镜5′在滑槽10内滑动,滑槽10的方向设置为朝向转镜4上与该中继透镜5′对应的反射点T,即使得滑槽10的方向与对应的反射光线主光线L′重合,以保证中继透镜5′在该滑槽10内滑动调节时中继透镜的主光轴与主光线L′重合。在排镜架9中对应每个滑槽10还设有紧固装置或紧固件用来将调节好位置的中继透镜5′固定在排镜架9上。在排镜架的内侧表面P9(即排镜架9朝向转镜一侧的表面)设有出瞳光阑片11,出瞳光阑阵列8开设在该出瞳光阑片11上,将该排镜架的内侧表面P9设置为以第一Pascal蜗线为准线的柱面,将出瞳光阑片11粘贴在该内侧表面P9上,从而保证出瞳光阑片11上的出瞳光阑阵列5设置在以第一Pascal蜗线为准线的柱面,进而保证转镜能够实现等速扫描。
在排镜架9的内侧还设有透明玻璃球罩12,将转镜4设置在透明玻璃球罩12内;将透明玻璃球罩12内设置为真空,使得转镜4在透明玻璃球罩12内旋转时风阻大大减少,从而减少了转镜旋转时的阻力和对成像质量的影响;透明玻璃球罩同时起到长焦距负透镜的作用。
在对该暗箱进行装调时,先将记录像面6、排镜架9按照要求以转镜的旋转中心O为基准加工出来,并将出瞳光阑片11固定在排镜架的内侧表面P9;再将装有转镜4的真空透明玻璃球罩12设置在箱体7内;记录像面6在箱体7内,使得记录像面6在以第三Pascal蜗线为准线的柱面上;调节场镜3以使二次像I2成在所设计的转镜镜面附近;再将排镜架9安装到箱体7内的记录像面6和转镜4之间,以转镜的旋转中心O为基准加工排镜架的内侧表面P9使得设有出瞳光阑阵列的出瞳光阑片11在以第一Pascal蜗线为准线的柱面P8上;再将各个中继透镜5′放入至排镜架9中对应的滑槽10内形成中继透镜阵列5,并调整每个中继透镜5′在滑槽10内的位置,使得中继透镜的主点H在以第二Pascal蜗线为准线的柱面P5上,这时中间像I2经转镜、球罩和中继透镜成像I3′在记录像面6上,再将所有的中继透镜5′固定在排镜架9上;再将整个箱体7加盖密封即可完成整个转镜分幅相机暗箱的装调。
在上述实施例中,还可在箱体内设置两排排镜架,将排镜架对称设置在转镜两侧(也可不对称设置),在箱体内形成了两组光学系统、两个摄影记录区域,从而实现等待型摄影记录,所谓等待型摄影记录是指两个摄影区域能够连续交替进行摄影记录,一直在等待着记录,而对被摄影目标的触发时间始点要求不高,同时也能够获得更多的画幅数。
在上述实施例中,在小相对孔径情况下,按上述的中继透镜共轴成像曲面方程,在靠近中继透镜主面位置加工定位中继透镜阵列的Pascal曲面;在大相对孔径情况下,可将每个中继透镜做成一个小组件,设置中继透镜的光轴在朝向与该中继透镜对应反射点的方向上的位置可调,这样就可通过各中继透镜组件对记录像面和二次像的对焦成像来调整每个中继透镜组件的安装位置。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
无原理误差的转镜分幅相机暗箱专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0