







专利摘要
为了解决现有偏振成像技术成像灵敏度低的问题,本发明提供了一种全斯托克斯单光子压缩偏振成像装置和方法。本发明将微偏振片阵列贴合在DMD镜面上,实现了基于单像素成像技术的偏振成像,同时采用单光子探测器探测光强,具有超高的成像灵敏度。
权利要求
1.一种全斯托克斯单光子压缩偏振成像装置,其特征在于,包括:
成像透镜(1),用于对成像目标进行成像;
DMD(3),设置在所述成像透镜(1)的像面上,用于接收成像透镜(1)所成的像;DMD(3)由U×N个微镜构成,其中U、N分别为DMD每一行和每一列的微镜数目;
微偏振片阵列(2),贴合在DMD(3)的镜面上;微偏振片阵列(2)包括R×Q个2×2维微偏振单元(21),每一个微偏振片单元(21)均包括设置在同一平面上的四个不同偏振角度的微偏振片(211),四个不同偏振角度从左上角顺时针依次为45°、90°、135°、0°;将所述DMD(3)的微镜划分为2R×2Q个微镜组合像素,一个所述微镜组合像素包括
聚焦透镜(4),设置在DMD(3)的反射光路上,用于将DMD(3)的反射光汇聚至单光子探测器(5)的光敏面上;
单光子探测器(5),用于将收集到的光信号转化为离散的单光子脉冲信号,并输入基于FPGA的控制与同步计数模块;
基于FPGA的控制与同步计数模块,用于向DMD控制器输出同步采样脉冲信号、对单光子探测器(5)输出的所述单光子脉冲信号进行计数并输出至上位机,以及从上位机接收控制指令;
上位机,用于生成扩展测量矩阵,并将扩展测量矩阵加载至DMD控制器;所述扩展测量矩阵由数字0和1构成,通过数字0或1控制DMD(3)中微镜的翻转;
DMD控制器,接收所述扩展测量矩阵,当检测到输入的同步采样脉冲信号脉冲的上升沿时,控制DMD(3)中微镜的翻转。
2.基于权利要求1所述的全斯托克斯单光子压缩偏振成像装置的成像方法,其特征在于,包括以下步骤:
步骤1:将成像目标放置于成像透镜(1)之前,采用极弱的平行光照射成像目标,并在上位机上设置采样频率为F,每个偏振角度的采样次数为M;所述平行光的光束的照射面积大于成像目标的平面面积;
步骤2:生成4×M个大小为R×Q的实际测量矩阵A,然后通过实际测量矩阵A生成4×M个大小为U×N的扩展测量矩阵B,并将所有的扩展测量矩阵B加载至DMD控制器;
步骤3:基于FPGA的控制与同步计数模块通过上位机发出控制指令产生开始测量信号;
步骤4:基于FPGA的控制与同步计数模块探测到开始测量信号的上升沿后,向DMD控制器输出频率为F、个数为4M的同步采样脉冲信号,同步采样脉冲信号中的每一个脉冲代表一次采样;
步骤5:DMD控制器每检测到一个同步采样脉冲信号脉冲的上升沿,加载一个对应的扩展测量矩阵B到DMD(3)上控制其微镜的翻转;
步骤6:与步骤5同步地,在每检测到一个同步采样脉冲信号脉冲的上升沿时,基于FPGA的控制与同步计数模块保存当前光子计数值a
步骤7:基于FPGA的控制与同步计数模块对单光子探测器(5)输出的单光子脉冲信号进行计数;
步骤8:重复步骤5-7,直到经过4M个同步采样脉冲信号的脉冲,完成4M次采样;
步骤9:重建45°偏振图像,90°偏振图像,0°偏振图像,135°偏振图像:
基于FPGA的控制与同步计数模块将第1~第M次采样的M个光子计数值a
y
通过压缩传感算法,求解式(1)的最优解x
基于FPGA的控制与同步计数模块将第M+1~第2M次采样的M个光子计数值a
y
通过压缩传感算法,求解式(2)的最优解x
基于FPGA的控制与同步计数模块将第2M+1~第3M次采样的M个光子计数值a
y
通过压缩传感算法,求解式(3)的最优解x
基于FPGA的控制与同步计数模块将第3M+1~第4M次采样的M个光子计数值a
y
通过压缩传感算法,求解式(4)的最优解x
上述e为整个全斯托克斯单光子压缩偏振成像装置的系统噪声;
步骤10:上位机利用45°偏振图像,90°偏振图像,0°偏振图像,135°偏振图像重建偏振度图像和偏振角图像。
3.根据权利要求2所述的全斯托克斯单光子压缩偏振成像装置的成像方法,其特征在于:
步骤2中,将扩展测量矩阵B加载至DMD控制器中的方法为:
首先,将生成的4×M个扩展测量矩阵B变成行向量;
然后,将45°偏振度对应的M个测量行向量组合成一个所述大测量矩阵C
最后,将大测量矩阵C
4.根据权利要求2所述的全斯托克斯单光子压缩偏振成像装置的成像方法,其特征在于:
所述步骤2中扩展测量矩阵B的生成方法:
步骤2.1:生成M个用于45度偏振成像的扩展测量矩阵:
步骤2.1.1:生成一个用于45度偏振成像的实际测量矩阵A
步骤2.1.2:生成维度等于DMD(3)的微镜阵列维度U×N的初始化矩阵,初始化矩阵的元素与微镜一一对应;将初始化矩阵划分为2R×2Q个单元矩阵,每个单元矩阵与微镜组合像素一一对应;根据微偏振片阵列(2)中45度微偏振片和微镜组合像素的对应关系,45度偏振成像的实际测量矩阵A
步骤2.1.3:将实际测量矩阵A
步骤2.1.4:重复步骤2.1.1-2.1.3生成M个用于45度偏振成像的扩展测量矩阵;
步骤2.2:生成M个用于90度偏振成像的扩展测量矩阵:
采用步骤2.1.1-2.1.4相同的方法,生成M个用于90度偏振成像的扩展测量矩阵B
步骤2.3:生成M个用于0度偏振成像的扩展测量矩阵:
采用步骤2.1.1-2.1.4相同的方法,生成M个用于0度偏振成像的扩展测量矩阵B
步骤2.4:生成M个用于135度偏振成像的扩展测量矩阵:
采用步骤2.1.1-2.1.4相同的方法,生成M个用于135度偏振成像的扩展测量矩阵B
上述i,j表示实际测量矩阵A的第i行和第j列;t1,t2表示扩展测量矩阵B的第t1行和第t2列,也表示在DMD上的像素位置。
说明书
技术领域
本发明属于微弱光成像领域和偏振成像领域,涉及一种全斯托克斯单光子压缩偏振成像装置和方法。
背景技术
偏振成像技术,即通过获取物体表面反射光波偏振态进行成像的技术。偏振成像探测能够在背景复杂、目标遮挡和隐藏等情况下有效探测和感知目标,满足安防监控、遥感遥测、光电跟踪和目标捕捉等领域的应用需求。根据技术方案的不同,已发展出了分时型、分振幅型、分孔径型、分焦平面型和干涉型等多种偏振成像技术。由于现有偏振成像技术灵敏度低,在极弱光、高散射介质条件下,成像距离和成像质量方面有待提高。
单光子探测技术是一项具有单光子限灵敏度的极微弱光探测技术,其原理是当微弱的光波信号入射到单光子探测器后,探测器输出离散的脉冲序列,每个脉冲表示探测到一个光子,然后通过对单光子脉冲的甄别和计数来探测光强。单光子探测器如光电倍增管(PMT)、单光子雪崩光电二极管(SPAD)、超导单光子探测器(SSPD)等多属于点探测器,要实现成像探测,必须采用高精密光学扫描元件进行扫描成像,成像时间长。具有二维空间分辨的单光子探测器,如阵列SPAD,阵列SSPD,ICCD,EMCCD等非常昂贵,且分辨率不高。
单像素成像是一种基于压缩传感理论,采用无位置分辨探测器实现二维成像的新型成像技术。采用数字微镜器件(Digital Micromirror Device,DMD)对物体进行随机光调制,最后将调制后的光汇聚在点探测器上,利用每次探测器接收到的光信号和加载至DMD的伪随机码重建出二维图像。与传统多像素成像技术相比,单像素成像有两个主要优点:一是通过仅使用点检测器可以实现二维成像,因此该成像方法具有低成本,尤其是在红外,太赫兹等特殊波段;二是单像素成像系统中的点检测器可以同时收集多个像素的光强度,信噪比大大提高,具有超高的灵敏度。本发明提出将微偏振片阵列贴合在DMD的微镜阵列上,将单光子探测技术和单像素成像技术结合在一起,实现全斯托克斯单光子压缩偏振成像,具有超高灵敏度和低成本的优势。
发明内容
为了解决现有偏振成像技术成像灵敏度低的问题,本发明提供了一种全斯托克斯单光子压缩偏振成像装置和方法。
本发明的技术方案是:
一种全斯托克斯单光子压缩偏振成像装置,其特殊之处在于,包括:
成像透镜,用于对成像目标进行成像;
DMD,设置在所述成像透镜的像面上,用于接收成像透镜所成的像;DMD由U×N个微镜构成,其中U、N分别为DMD每一行和每一列的微镜数目;
微偏振片阵列,贴合在DMD的镜面上;微偏振片阵列包括R×Q个2×2维的微偏振单元,每一个微偏振片单元均包括设置在同一平面上的四个不同偏振角度的微偏振片,四个不同偏振角度从左上角顺时针依次为45°、90°、135°、0°;将所述DMD的微镜划分为2R×2Q个微镜组合像素,一个所述微镜组合像素包括 个微镜,微偏振片阵列的各个微偏振片与DMD上的各个微镜组合像素的位置一一对应设置;R、Q均为大于等于1的整数;
聚焦透镜,设置在DMD的反射光路上,用于将DMD的反射光汇聚至单光子探测器的光敏面上;
单光子探测器,用于将收集到的光信号转化为离散的单光子脉冲信号,并输入基于FPGA的控制与同步计数模块;
基于FPGA的控制与同步计数模块,用于向DMD控制器输出同步采样脉冲信号、对单光子探测器输出的所述单光子脉冲信号进行计数并输出至上位机,以及从上位机接收控制指令;
上位机,用于生成扩展测量矩阵,并将扩展测量矩阵加载至DMD控制器;所述扩展测量矩阵由数字0和1构成,通过数字0或1控制DMD中微镜的翻转;
DMD控制器,接收所述扩展测量矩阵,当检测到输入的同步采样脉冲信号脉冲的上升沿时,控制DMD中微镜的翻转。
本发明还提供了一种基于上述的全斯托克斯单光子压缩偏振成像装置的成像方法,其特殊之处在于,包括以下步骤:
步骤1:将成像目标放置于成像透镜之前,采用极弱的平行光照射成像目标,并在上位机上设置采样频率为F,每个偏振角度的采样次数为M;所述平行光的光束的照射面积大于成像目标的平面面积;
步骤2:生成4×M个大小为R×Q的实际测量矩阵A,然后通过实际测量矩阵A生成4×M个大小为U×N的扩展测量矩阵B,并将所有的扩展测量矩阵B加载至DMD控制器;
步骤3:基于FPGA的控制与同步计数模块通过上位机发出控制指令产生开始测量信号;
步骤4:基于FPGA的控制与同步计数模块探测到开始测量信号的上升沿后,向DMD控制器输出频率为F、个数为4M的同步采样脉冲信号,同步采样脉冲信号中的每一个脉冲代表一次采样;
步骤5:DMD控制器每检测到一个同步采样脉冲信号脉冲的上升沿,加载一个对应的扩展测量矩阵B到DMD上控制其微镜的翻转;
步骤6:与步骤5同步地,在每检测到一个同步采样脉冲信号脉冲的上升沿时,基于FPGA的控制与同步计数模块保存当前光子计数值ai到其内部缓存器,然后将基于FPGA的控制与同步计数模块中的计数器清零;
步骤7:基于FPGA的控制与同步计数模块对单光子探测器输出的单光子脉冲信号进行计数;
步骤8:重复步骤5-7,直到经过4M个同步采样脉冲信号的脉冲,完成4M次采样;
步骤9:重建45°偏振图像,90°偏振图像,0°偏振图像,135°偏振图像:
基于FPGA的控制与同步计数模块将第1~第M次采样的M个光子计数值a1~aM输出到上位机作为45°偏振角的M个测量值,将M个测量值形成列向量y1;将相对应的M个扩展测量矩阵B变成M个大小为1×(U×N)的测量行向量,再将这M个测量行向量组合成一个大小为M×(U×N)的大测量矩阵C1,则45°偏振角的测量过程为:
y1=C1x1+e (1)
通过压缩传感算法,求解式(1)的最优解x1,重建45°偏振图像;
基于FPGA的控制与同步计数模块将第M+1~第2M次采样的M个光子计数值aM+1~a2M输出到上位机作为90°偏振角的M个测量值,将M个测量值形成列向量y2;将相对应的M个扩展测量矩阵B变成M个大小为1×(U×N)的测量行向量,再将这M个测量行向量组合成一个大小为M×(U×N)的大测量矩阵C2,则90°偏振角的测量过程为:
y2=C2x2+e (2)
通过压缩传感算法,求解式(2)的最优解x2,重建90°偏振图像;
基于FPGA的控制与同步计数模块将第2M+1~第3M次采样的M个光子计数值a2M+1~a3M输出到上位机作为0°偏振角的M个测量值,将M个测量值形成列向量y3;将相对应的M个扩展测量矩阵B变成M个大小为1×(U×N)的测量行向量,再将这M个测量行向量组合成一个大小为M×(U×N)的大测量矩阵C3,则0°偏振角的测量过程为:
y3=C3x3+e (3)
通过压缩传感算法,求解式(3)的最优解x3,重建0°偏振图像;
基于FPGA的控制与同步计数模块将第3M+1~第4M次采样的M个光子计数值a3M+1~a4M输出到上位机作为135°偏振角的M个测量值,将M个测量值形成列向量y4;将相对应的M个扩展测量矩阵B变成M个大小为1×(U×N)的测量行向量,再将这M个测量行向量组合成一个大小为M×(U×N)的大测量矩阵C4,则135°偏振角的测量过程为:
y4=C4x4+e (4)
通过压缩传感算法,求解式(4)的最优解x4,重建135°偏振图像;
上述e为整个偏振成像装置的系统噪声;
步骤10:上位机利用45°偏振图像,90°偏振图像,0°偏振图像,135°偏振图像重建偏振度图像和偏振角图像。
进一步地,步骤2中,将扩展测量矩阵B加载至DMD控制器中的方法为:
首先,将生成的4×M个扩展测量矩阵B变成行向量;
然后,将45°偏振度对应的M个测量行向量组合成一个所述大测量矩阵C1,将90°偏振度对应的M个测量行向量组合成一个大测量矩阵C2,将0°偏振度对应的M个测量行向量组合成一个大测量矩阵C3,将135°偏振度对应的M个测量行向量组合成一个大测量矩阵C4;
最后,将大测量矩阵C1、C2、C3、C4组合成大小为4M×(U×N)的总测量矩阵C,存储至DMD控制器中。
进一步地,所述步骤2中扩展测量矩阵B的生成方法:
步骤2.1:生成M个用于45度偏振成像的扩展测量矩阵:
步骤2.1.1:生成一个用于45度偏振成像的实际测量矩阵A45,实际测量矩阵A45由数字0和1构成,A45的维度等于微偏振片阵列的维度R×Q,实际测量矩阵A45中的每一个元素分别与微偏振片单元中45度微偏振片一一对应;
步骤2.1.2:生成维度等于DMD的微镜阵列维度U×N的初始化矩阵,初始化矩阵的元素与微镜一一对应;将初始化矩阵划分为2R×2Q个单元矩阵,每个单元矩阵与微镜组合像素一一对应;根据微偏振片阵列中45度微偏振片和微镜组合像素的对应关系,45度偏振成像的实际测量矩阵A45的一个矩阵元素对应初始化矩阵中的一个单元矩阵。
步骤2.1.3:将实际测量矩阵A45中每个元素值赋值给该元素所对应的初始化矩阵中的单元矩阵中所有元素,将“0”赋值给初始化矩阵中其他的单元矩阵的所有元素,此时得到的初始化矩阵即为一个用于45度偏振成像的扩展测量矩阵B45,45度偏振成像的扩展测量矩阵B45与45度偏振成像的实际测量矩阵A45的对应关系为:
步骤2.1.4:重复步骤2.1.1-2.1.3生成M个用于45度偏振成像的扩展测量矩阵;
步骤2.2:生成M个用于90度偏振成像的扩展测量矩阵:
采用步骤2.1.1-2.1.4相同的方法,生成M个用于90度偏振成像的扩展测量矩阵B90,90度偏振成像的扩展测量矩阵B90与90度偏振成像的实际测量矩阵A90的对应关系为:
步骤2.3:生成M个用于0度偏振成像的扩展测量矩阵:
采用步骤2.1.1-2.1.4相同的方法,生成M个用于0度偏振成像的扩展测量矩阵B0,0度偏振成像的扩展测量矩阵B0与0度偏振成像的实际测量矩阵A0的对应关系为:
步骤2.4:生成M个用于135度偏振成像的扩展测量矩阵:
采用步骤2.1.1-2.1.4相同的方法,生成M个用于135度偏振成像的扩展测量矩阵B135,135度偏振成像的扩展测量矩阵B135与135度偏振成像的实际测量矩阵A135的对应关系为:
上述i,j表示实际测量矩阵A的第i行和第j列;t1,t2表示扩展测量矩阵B的第t1行和第t2列,也表示在DMD上的像素位置。
本发明的优点:
1.成像灵敏度高
与传统偏振成像将微偏振片阵列贴合在CCD上不同,本发明首次提出将微偏振片阵列贴合在DMD镜面上,这样就可以实现基于单像素成像技术的偏振成像,探测器可以同时收集多个像素的光强度,信噪比大大提高。同时探测器采用单光子探测器来探测光强,成像灵敏度可以进一步提高。因此本发明方案具有超高的成像灵敏度。
2.成本低
由于采用了单像素成像技术,利用无位置分辨的单光子点探测器就可以实现二维单光子成像,因此本发明方案具有低成本优势。
附图说明
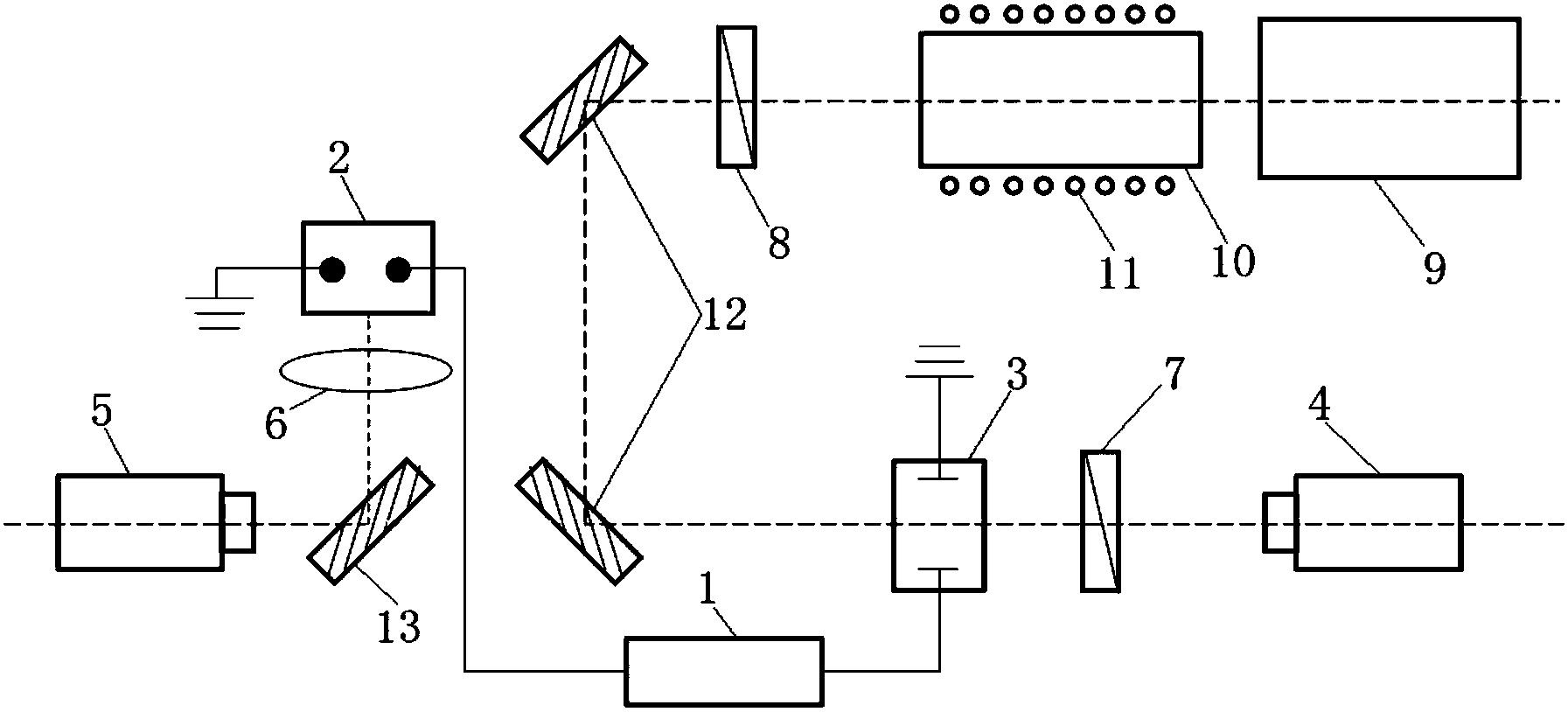
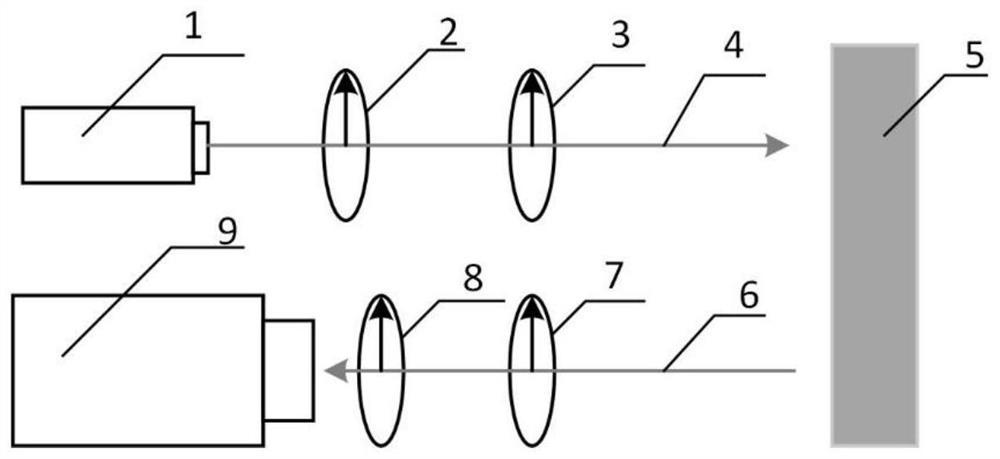
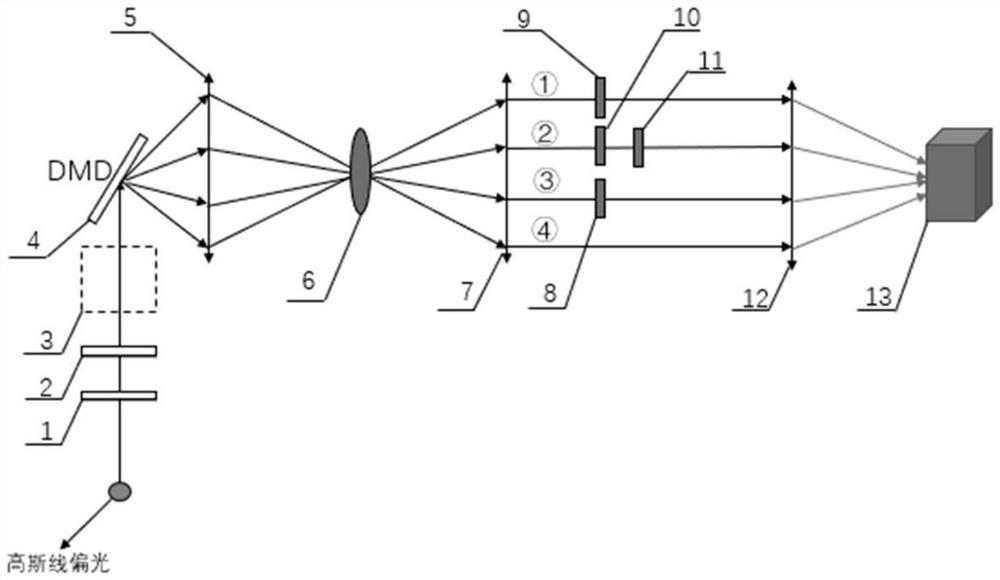
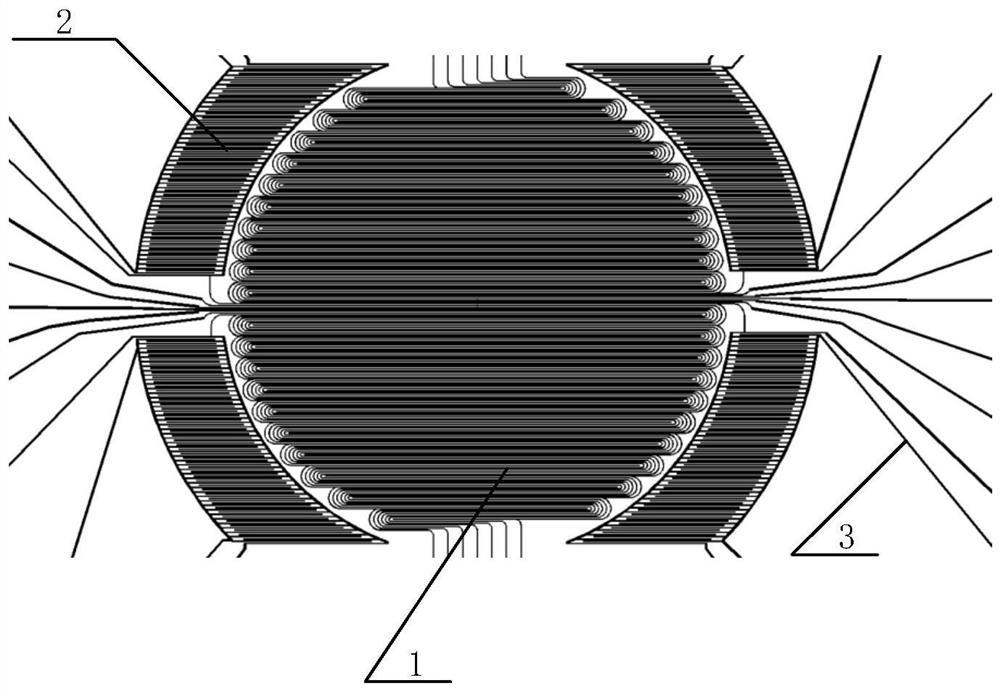
图1为本发明全斯托克斯单光子压缩偏振成像装置的原理示意图。
图2为微偏振片阵列、DMD微镜阵列、实际测量矩阵和扩展测量矩阵的关系图。
图3为基于FPGA的控制与同步计数模块的时序图。
图4为本发明全斯托克斯单光子压缩偏振成像的重建框图。
附图标记说明:
1-成像透镜;2-微偏振片阵列;21-微偏振片单元;211-微偏振片;3-DMD;4-聚焦透镜;5-单光子探测器。
具体实施方式
下面结合附图对本发明进行详细说明
如图1所示,本发明所提供的全斯托克斯单光子压缩偏振成像装置,包括成像透镜1、微偏振片阵列2、DMD3、DMD控制器、聚焦透镜4、单光子探测器5、基于FPGA的控制与同步计数模块以及上位机。
成像透镜1用于对成像目标进行成像。
DMD3设置在成像透镜1的像面上,用于接收成像透镜1所成的目标的像。DMD3是光开关的一种,由多个微小的反射镜(简称微镜)构成,反射镜的数目由DMD的显示分辨率决定。
微偏振片阵列2紧密贴合在DMD3靠近成像透镜1一侧的表面。如图2所示,微偏振片阵列2包括R×Q个依次紧密排列的2×2大小的微偏振片单元21,R、Q均为大于等于1的整数;每一个微偏振片单元21均包括设置在同一平面上的四个不同偏振角度的微偏振片211,四个不同偏振角度从左上角顺时针依次为45°、90°、135°、0°。微偏振片阵列2紧密贴合在DMD3的镜面上的贴合方法为:整个微偏振片阵列2与DMD3镜面上的微镜阵列的边缘对齐,微偏振片阵列2的各个微偏振片211与DMD3上的各个微镜组合像素的位置对应设置,并将微偏振片阵列2的各个微偏振片211一一对应覆盖于DMD3的相应的微镜组合像素上。例如,若微偏振片阵列2的分辨率为R×Q,则将DMD3镜面上的微镜阵列划分为2R×2Q个微镜组合像素,一个微镜组合像素对应于一个微偏振片211,微偏振片阵列2的一个微偏振片单元21对应于四个微镜组合像素。如果DMD3镜面上的微镜阵列有U×N个微镜,则一个微镜组合像素包括 个微镜;不同的DMD,U、N的取值不一样,选用的DMD,U、N都要大于2,且U、N应能分别整除2R和2Q。
聚焦透镜4设置在DMD3的反射光路上,用于将DMD3的全屏镜面(即靠近成像透镜1一侧的表面)反射光汇聚至单光子探测器5的光敏面上。
单光子探测器5与基于FPGA的控制与同步计数模块相连,将收集到的光信号转化为离散的单光子脉冲信号后,输入基于FPGA的控制与同步计数模块。
基于FPGA的控制与同步计数模块与DMD控制器相连,向DMD控制器输出同步采样脉冲信号。
基于FPGA的控制与同步计数模块与上位机相连,用于对单光子探测器5输出的单光子脉冲信号进行计数,将得到的光子计数值输出至上位机,以及从上位机接收控制指令。
上位机与DMD控制器相连,用于生成扩展测量矩阵,并将扩展测量矩阵加载至DMD控制器;扩展测量矩阵由随机的数字0和1构成,如果为0,则微镜不翻转;如果为1,则微镜翻转,从而实现DMD3的开合,对光学图像进行空间调制。
DMD控制器与DMD3相连,DMD控制器接收到加载的扩展测量矩阵,当检测到输入的同步采样脉冲信号脉冲的上升沿时,根据所述扩展测量矩阵的元素“0”和“1”控制DMD3中微镜的翻转。
基于图1所示全斯托克斯单光子压缩偏振成像装置的成像方法,包括以下步骤:
步骤1:将成像目标放置于成像透镜1之前,采用极弱(因为是微弱光条件下的单光子成像,所以是极弱光)的平行光照射成像目标,并且平行光的光束的照射面积大于成像目标的平面面积;在上位机上设置采样频率为F,每个偏振角度的采样次数为M。
步骤2:如图2所示,首先上位机生成4×M个大小为R×Q的实际测量矩阵A,然后通过实际测量矩阵A生成4×M个大小为U×N的扩展测量矩阵B,并将所有的扩展测量矩阵B加载至DMD控制器。其中,将扩展测量矩阵B加载至DMD控制器中的方法为:
首先,将生成的4M个大小为U×N的扩展测量矩阵B分别变成M个大小为1×(U×N)的行向量(对于单个扩展测量矩阵B,是将其后一行的元素顺序接在其上一行最后一个元素之后,即可将其变成1×(U×N)的行向量);然后,将45°偏振度对应的M个测量行向量按生成顺序依次逐行放置从而组合成一个大小为M×(U×N)的大测量矩阵C1,将90°偏振度对应的M个测量行向量按生成顺序依次逐行放置从而组合成一个大小为M×(U×N)的大测量矩阵C2,将0°偏振度对应的M个测量行向量按生成顺序依次逐行放置从而组合成一个大小为M×(U×N)的大测量矩阵C3,将135°偏振度对应的M个测量行向量按生成顺序依次逐行放置从而组合成一个大小为M×(U×N)的大测量矩阵C4;最后,将大测量矩阵C1、C2、C3、C4组合成大小为4M×(U×N)的总测量矩阵C,存储至DMD控制器中。
步骤3:基于FPGA的控制与同步计数模块通过上位机发出控制指令产生开始测量信号,基于FPGA的控制与同步计数模块的时序图如图3所示。
步骤4:基于FPGA的控制与同步计数模块探测到开始测量信号的上升沿后,向DMD控制器输出频率为F,个数为4M的同步采样脉冲信号,每一个脉冲代表一次采样。
步骤5:DMD控制器每检测到一个同步采样脉冲信号脉冲的上升沿,加载一个对应的扩展测量矩阵B到DMD3上控制其微镜的翻转(与扩展测量矩阵B中“1”对应的微镜翻转+12度,与扩展测量矩阵B中“0”对应的微镜保持不变)。
步骤6:与步骤5同步地,在每检测到一个同步采样脉冲信号脉冲的上升沿时,基于FPGA的控制与同步计数模块保存当前光子计数值ai到其内部缓存器,然后将基于FPGA的控制与同步计数模块中的计数器清零。
步骤7:基于FPGA的控制与同步计数模块对单光子探测器5输出的单光子脉冲信号进行计数。
步骤8:重复步骤5-7,直到经过4M个同步采样脉冲信号的脉冲,完成4M次采样。
步骤9:重建45°偏振图像,90°偏振图像,0°偏振图像,135°偏振图像:
基于FPGA的控制与同步计数模块将第1~第M次采样的M个光子计数值a1~aM输输出到上位机,和相对应的M个扩展测量矩阵B一起重建45°偏振图像;
基于FPGA的控制与同步计数模块将第M+1~第2M次采样的M个光子计数值aM+1~a2M输出到上位机,和相对应的M个扩展测量矩阵B一起重建90°偏振图像;
基于FPGA的控制与同步计数模块将第2M+1~第3M次采样的M个光子计数值a2M+1~a3M输出到上位机,和相对应的M个扩展测量矩阵B一起重建0°偏振图像;
基于FPGA的控制与同步计数模块将第3M+1~第4M次采样的M个光子计数值a3M+1~a4M输出到上位机,和相对应的M个扩展测量矩阵一起重建135°偏振图像。
具体重建过程如下:
其中,a1,a2,a3,...a4M分别为光子计数值,即测量值;
y1,y2,y3,y4分别为45°、90°、0°、135°偏振度各自的测量值的列向量。
图4所示为本发明全斯托克斯单光子压缩偏振成像的重建框图,如果考虑系统的噪声e,一个光子计数值ai可以认为是第i个扩展测量矩阵B和对应偏振角度的偏振图像x的内积。在M次采样后,获得M个测量值,并且大测量矩阵C和图像x的内积可以表示为:
其中,C1、C2、C3、C4分别为45°、90°、0°、135°偏振度各自的大测量矩阵,且大小均为M×(U×N)。
一般偏振图像x本身未必是稀疏的,则令x=ψx',ψ是稀疏变换矩阵,则(2)式可变化为(3)式:
在压缩感知理论中,为了求解出x',将求解过程描述为凸优化问题,即:
其中:τ是常量,|| ||p代表lp范数,定义为
将光子计数值的列向量y1,y2,y3,y4发送到上位机,并通过OMP或TVLA3或GPSR等压缩传感算法,求解式(4)式的最优解x'来重建图像,即重建出目标信号分别在45°、90°、0°、135°偏振度下的偏振图像。
步骤10:上位机利用45°偏振图像,90°偏振图像,0°偏振图像,135°偏振图像重建偏振度图像和偏振角图像:
通过不同角度的偏振图像可获得不同角度的光强分别为I45°、I90°、I0°、I135°
目标的偏振态S可以由斯托克斯矢量表示为(5)式,且通常V=0:
S=[I,Q,U,V]T=[I0°+I90°,I0°-I90°,I45°-I135°,0] (5)
根据公式(6)可得出目标的偏振度P和偏振角α值,P的取值范围为0到1,α的取值为0到π,根据每个像素的偏振度获得偏振度图像,根据每个像素的偏振角获得偏振角图像,实现压缩感知偏振成像的图像重建。
上述步骤2中扩展测量矩阵B的生成步骤如下:
步骤2.1:生成M个用于45度偏振成像的扩展测量矩阵:
步骤2.1.1:如图2所示,上位机生成一个用于45度偏振成像的实际测量矩阵A45(实际测量矩阵A45的每个元素是随机的,不是1就是0),实际测量矩阵A45的维度等于微偏振片阵列2的维度R×Q,实际测量矩阵A45中的每一个元素分别与微偏振片单元21中45度微偏振片211一一对应。
步骤2.1.2:生成维度等于DMD3的微镜阵列维度U×N的初始化矩阵,初始化矩阵的元素与微镜一一对应;将初始化矩阵划分为2R×2Q个单元矩阵,每个单元矩阵与微镜组合像素一一对应;根据微偏振片阵列21中45度微偏振片和微镜组合像素的对应关系,45度偏振成像的实际测量矩阵A45的一个矩阵元素对应初始化矩阵中的一个单元矩阵。
步骤2.1.3:将实际测量矩阵A45中每个元素值赋值给该元素所对应的初始化矩阵中的单元矩阵中所有元素,将“0”赋值给初始化矩阵中其他的单元矩阵的所有元素,此时得到的初始化矩阵即为一个用于45度偏振成像的扩展测量矩阵B45;并且,45度偏振成像的扩展测量矩阵B45与45度偏振成像的实际测量矩阵A45的对应关系为:
这里的i,j表示实际测量矩阵A45的第i行和第j列;t1,t2表示扩展测量矩阵B45的第t1行和第t2列,也表示在DMD上的像素位置,例如(1,1)为位于第一行第一列的元素;
步骤2.1.4:重复步骤2.1.1-2.1.3生成M个用于45度偏振成像的扩展测量矩阵。
步骤2.2:生成M个用于90度偏振成像的扩展测量矩阵:
采用步骤2.1.1-2.1.4相同的方法,生成M个用于90度偏振成像的扩展测量矩阵B90,90度偏振成像的扩展测量矩阵B90与90度偏振成像的实际测量矩阵A90的对应关系为:
这里的i,j表示实际测量矩阵A90的第i行和第j列;t1,t2表示扩展测量矩阵B90的第t1行和第t2列,也表示在DMD上的像素位置;
步骤2.3:生成M个用于0度偏振成像的扩展测量矩阵:
采用步骤2.1.1-2.1.4相同的方法,生成M个用于0度偏振成像的扩展测量矩阵B0,0度偏振成像的扩展测量矩阵B0与0度偏振成像的实际测量矩阵A0的对应关系为:
这里的i,j表示实际测量矩阵A0的第i行和第j列;t1,t2表示扩展测量矩阵B0的第t1行和第t2列,也表示在DMD上的像素位置;
步骤2.4:生成M个用于135度偏振成像的扩展测量矩阵:
采用步骤2.1.1-2.1.4相同的方法,生成M个用于135度偏振成像的扩展测量矩阵B135,135度偏振成像的扩展测量矩阵B135与135度偏振成像的实际测量矩阵A135的对应关系为:
这里的i,j表示实际测量矩阵A135的第i行和第j列;t1,t2表示扩展测量矩阵B135的第t1行和第t2列,也表示在DMD上的像素位置。
需要说明的是,上述步骤2中,也可以先生成用于0度、90度或135度偏振成像的实际测量矩阵,以上仅是以45度为例。
一种全斯托克斯单光子压缩偏振成像装置和方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0