








专利摘要
本实用新型提供了一种面向山地果园的果筐转载系统,涉及山地果园运输自动化领域。该山地果园的果筐转载系统包括运输车、转接装置和自动提升装置。运输车包括装载果框的前上开口的车厢,完成果筐自动滑下的抬升支架和滚轮;转接装置包括水平运输果筐的输送带和实时检测果筐位置光电传感器A、光电传感器B、光电传感器C。自动提升装置包括把电机B动力传递给推板的丝杠、引导推板运动的滑轨、改变压缩状态提升果筐高度的平行四边形结构。该实用新型把运输车、输送带和自动提升装置相结合,可自动、高效、准确的地转载果筐,提高运输的速度和自动化水平。
权利要求
1.一种面向山地果园的果筐转载系统,其特征在于,面向山地果园的果筐转载系统由运输车、转接装置 和自动提升装置三部分组成,其中: 所述运输车、转接装置和自动提升装置成直线排列以优化空间布局;运输车包括底盘、车厢、抬升支架、滚轮、电磁铁和弹簧;车厢安装在底盘上部,由底盘带动支撑和带动运动,车厢上部和前部开口,用于装卸果筐;抬升支架前端安装在车厢两侧厢壁上,后端与电磁铁和弹簧相连接用于支撑和引导果筐;电磁铁和弹簧成对安装在抬升支架后端两侧,通过弹簧压缩程度改变抬升支架后端高度;转接装置包括电机A、位移传感器、支架、输送带、光电传感器A、光电传感器B、光电传感器C;电机A安装在支架前方,用于带动输送带运动;位移传感器安装在支架横梁上,实时检测运输车是否到达指定位置;光电传感器A、光电传感器B、光电传感器C线性安装在输送带同一侧,实时检测果筐在输送带上的位置;自动提升装置包括光电传感器、支撑板、三孔连接杆、两孔连接杆、孔连接件、推板、滑轨、丝杠、联轴器、电机B、底板;滑轨对称安装在底板上,对推板具有支撑和导向的作用;丝杆通过联轴器连接电机B,通过电机提供的动力带动推板前后运动;两孔连接杆和三孔连接杆连接成平行四边形,下端与底板连接,上端与支撑板连接,具有支撑和带动支撑板上下运动的作用。
2.根据权利要求1所述一种面向山地果园的果筐转载系统,其特征在于:运输车的车厢前方和上方处于开口状态,完成果筐从上方放入和前方滑出的功能。
3.根据权利要求1所述一种面向山地果园的果筐转载系统,其特征在于:抬升支架与车厢底面平行安装,电磁铁断电后,弹簧带动抬升支架后端绕前端旋转,形成一个30°坡度。
4.根据权利要求1所述一种面向山地果园的果筐转载系统,其特征在于:抬升支架上安装的滚轮采用工程塑料,滚轮能够绕中间轴旋转,保证抬升支架后端抬升后果筐顺利向下运动。
5.根据权利要求1所述一种面向山地果园的果筐转载系统,其特征在于:光电传感器A、光电传感器B、光电传感器C在输送带同一侧线性安装,相邻间距500mm,实时检测果筐在输送带上的位置,调节输送给自动提升装置的果筐数量。
6.根据权利要求1所述一种面向山地果园的果筐转载系统,其特征在于:位移传感器安装在支架前方的横梁中间,实时检测指定位置是否存在运输车。
7.根据权利要求1所述一种面向山地果园的果筐转载系统,其特征在于:支撑板上方开有凹槽其尺寸为400mm×300mm×20mm,下方采用四点支撑,凹槽可以防止果筐滑落支撑板,四点支撑避免支撑板发生倾覆。
8.根据权利要求1所述一种面向山地果园的果筐转载系统,其特征在于:两个滑轨中间开有凹槽,对向布置,中间安装推板,丝杠带动推板前进或者后退。
9.根据权利要求1所述一种面向山地果园的果筐转载系统,其特征在于:运输车、转接装置和自动提升装置直线排列,优化空间布局,降低系统复杂程度。
说明书
技术领域
本专利涉及一种果筐转载系统,具体涉及山地果园运输自动化领域。
背景技术
水果是人类饮食中不可缺少的重要组成部分,目前果园产业已成为果农的主要经济来源,但是我国大部分果园分布在丘陵山地,由于其地形地貌限制,现有机械存在难进难出、作业性能差等问题,尤其是采后果实运输环节,主要以人工为主,费时费力。随着果园产业种植模式转变和劳动成本逐年递增,对于果园运输机械的需求增加。采用运输车、转接装置和自动提升装置相结合的作业模式,完成果品的林间运输,不仅能够提高机械化和自动化水平,还能减少人工成本投入和运输环节的损伤。
中国专利CN 209226029 U公开了一种山地果园运输机,包括导轨、导轨支柱、齿条、机动装置、从动装置、控制箱、民用GPS、变速电机、蓄电池、速度传感器、装载斗、连接杆、伸缩围栏、插销。机动装置和两从动装置结构相同,连接于导轨,机动装置顶部固定有控制箱,机动装置侧面安装有变速电机和蓄电池,控制箱前端安装有速度传感器。此装置能够完成果园运输工作,但是轨道铺设成本高,应对风险能力较差。
有鉴于此,需要一种面向山地果园的果筐转载系统,使用运输车、转接装置和自动提升装置三者相结合的转载系统,能够完成果园内果筐的转载。安装在山地果园种植区,按照次序完成果筐运输、转接和提升过程。而且目前山地果园没有应用于果园的自动转接和提升装置,因此面向山地果园的转载系统的研究对于提高采后果实运输效率和减少劳动力需求具有重要意义。
发明内容
针对山地果园运输时的劳动需求量大、工作效率低等问题,本实用新型提供一种面向山地果园的果筐转载系统。
本专利通过下列技术方案实现:一种面向山地果园的果筐转载系统,由运输车(1)、转接装置(2)和自动提升装置(3)组成。其特征是:运输车(1)中安装的电磁铁(106)通断电,可以控制弹簧(105)的压缩程度,以调节抬升支架(103)后端的高度;抬升支架(103)后端被弹簧(105)弹力抬升时,果筐可以沿着该倾角运动到转接装置(2)的输送带(204)上;转接装置(2)通过输送带(204)直线运输果筐,把果筐转接到自动提升装置(3);光电传感器A(205)、光电传感器B(206)、光电传感器C(207)在输送带(204)一侧线性安装,实时检测果筐在输送带(204)上的位置以适应不同的工况;电机B(301)通过丝杠(304)带动推板(305)在滑轨(306)上直线运动,调节平行四边形的压缩状态,以改变果筐的高度。
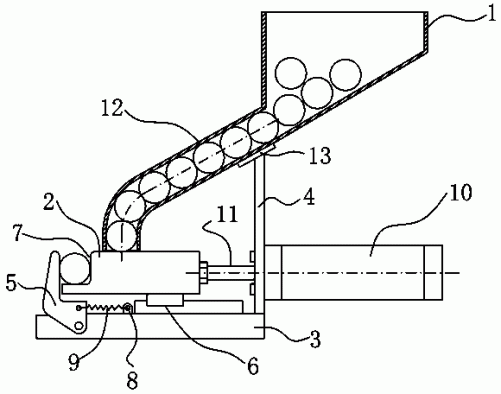
运输车(1)的车厢(102)安装有抬升支架(103),电磁铁(106)断电后,抬升支架(103)后端可在弹簧(105)的作用下抬升,形成一个坡度;抬升支架(103)上安装滚轮(104),滚轮(104)可绕其中心轴旋转,果筐沿坡度下移时,减小运动摩擦力;转接装置(2) 上安装位移传感器(202),用于检测运输车(1)是否到达指定位置;转接装置(2)上安装光电传感器A(205)、光电传感器B(206)和光电传感器C(207),用于实时检测果筐在输送带(204)上的位置;支撑板(310)使用四点支撑,一侧安装光电传感器D(311),用于实时检测支撑板(310)上是否存在果筐;三孔连接杆(308)和两孔连接杆(307)通过孔连接件(309)连接成平行四边形;推板(305)安装在两侧滑轨(306)的凹槽内,能够顺着凹槽前后移动;推板(305)中间具有螺纹孔,电机B(301)通过丝杠(304)把圆周运动转换为推板(305)的直线运动。
优选的,所述运输车(1)的车厢(102)上方和前方开口,方便放入果筐和果筐沿着抬升支架(103)滑出。
优选的,所述抬升支架(103)通过电磁铁(106)通断电改变弹簧(105)的压缩状态控制其后端的高度,使抬升支架(103)保持水平或形成一个30°的倾角,以运输果筐和果筐沿着抬升支架(103)运动。
优选的,所述抬升支架(103)中间安装滚轮(104),滚轮(104)可绕其中心轴旋转,减小果筐沿抬升支架(103)下行时的阻力,材料选用工业塑料。
优选的,所述光电传感器A(205)、光电传感器B(206)、光电传感器C(207)在输送带(204)同一侧线性安装,相邻间距500mm,实时检测果筐在输送带(204)上的位置,根据检测结果不同控制电机A(201)转动,调节输送给自动提升装置(3)的果筐数量。
优选的,所述位移传感器(202)安装在支架(203)前方横梁中间,实时检测指定位置是否存在运输车(1),根据检测结果调节电机A(201)的旋转。
优选的,所述支撑板(310)上方开有凹槽,其尺寸为400mm×300mm×20mm,以限制果筐在支撑板(310)上运动,下方采用四点支撑,避免支撑板(310)发生倾覆。
优选的,所述滑轨(306)对向安装,中间开有凹槽,具有支撑和导向的作用,保证推板(305)直线前进和后退,以改变平行四边形结构的压缩状态,调节果筐距离地面的高度。
优选的,所述运输车(1)、转接装置(2)、自动提升装置(3)直线布置,优化空间布局。
附图说明
下面结合附图和实施方式对本专利进一步说明。
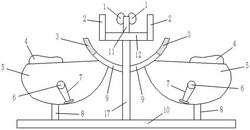
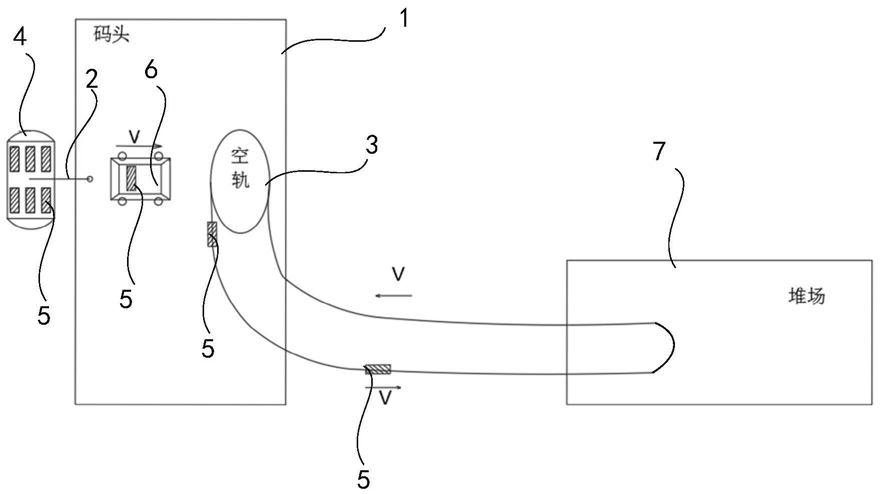
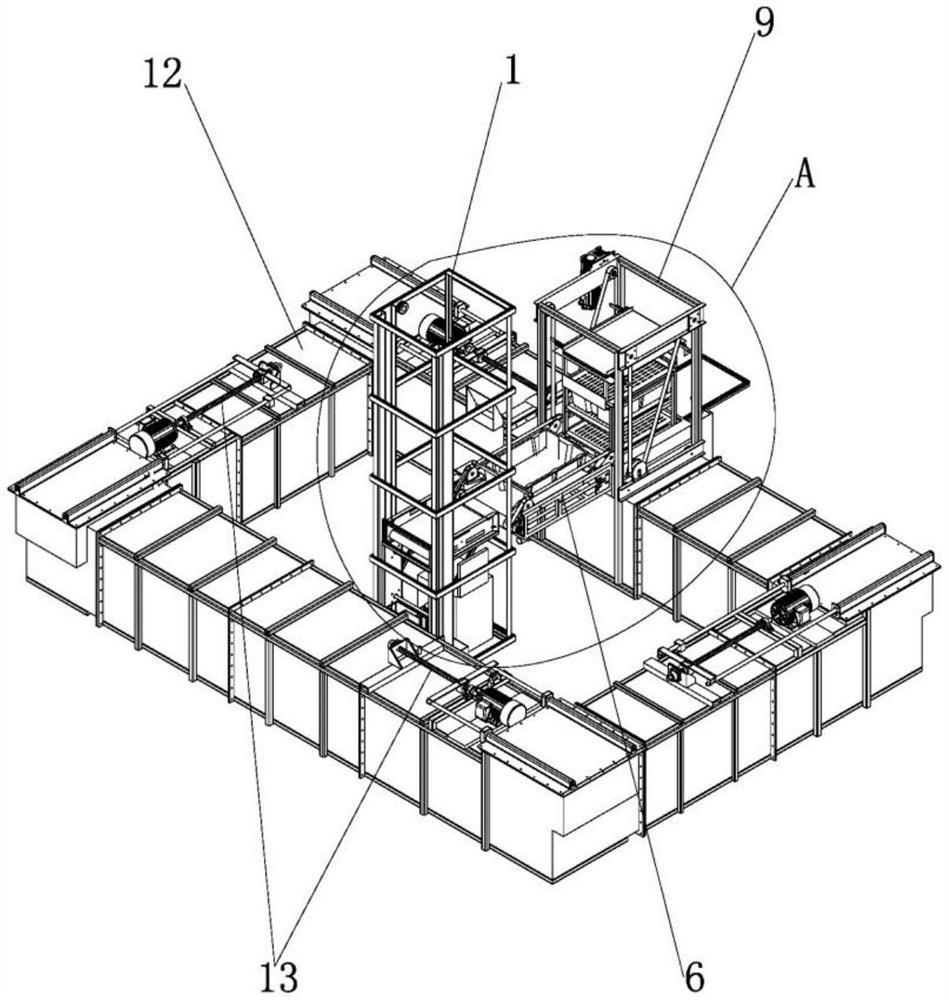
图1是一种面向山地果园的果筐转载系统;
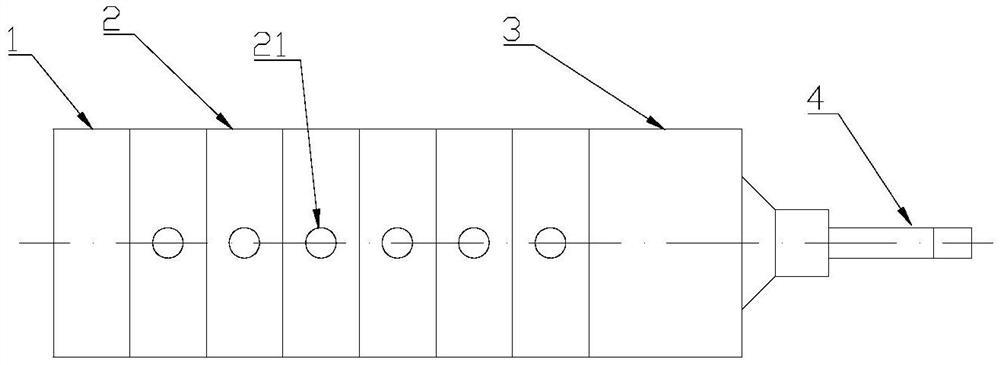
图2是运输车(1)的结构示意图;
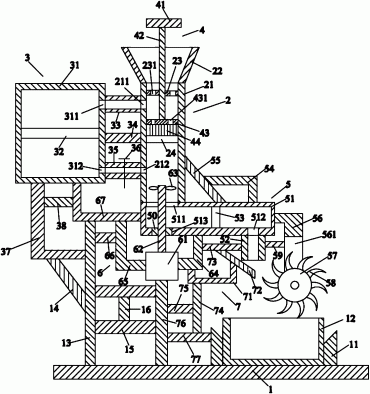
图3是转接装的结构示意图;
图4是自动提升装置(3)的结构示意图。
以下是图中各部件标号:
底盘(101)、车厢(102)、抬升支架(103)、滚轮(104)、电磁铁(106)、弹簧(105)、电机A(201)、位移传感器(202)、支架(203)、输送带(204)、光电传感器A(205)、光电传感器B(206)、光电传感器C(207)、光电传感器D(311)、支撑板(310)、三孔连接杆(308)、两孔连接杆(307)、孔连接件(309)、推板(305)、滑轨(306)、丝杠(304)、联轴器(303)、电机B(301)、底板(302)。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
如图1、2、3和4所示,本专利的一种面向山地果园的果筐转载系统,包括运输车(1)、转接装置(2)和自动提升装置(3)三部分。运输车(1)包括底盘(101)、前方和上方不进行封口的车厢(102)、抬升支架(103)、滚轮(104)、电磁铁(106)和弹簧(105);转接装置(2)包括电机A(201)、位移传感器(202)、支架(203)、输送带(204)、光电传感器A(205)、光电传感器B(206)、光电传感器C(207);自动提升装置(3)包括光电传感器D(311)、支撑板(310)、三孔连接杆(308)、两孔连接杆(307)、孔连接件(309)、推板(305)、滑轨(306)、丝杠(304)、联轴器(303)、电机B(301)、底板(302);抬升支架(103)相对于车厢(102)的底面平行安装,具有支撑作用,当后端被抬升时具有导向作用;抬升支架(103)后端与电磁铁(106)和弹簧(105)连接,通过电磁铁(106)的通断改变弹簧(105)被压缩的程度,从而改变抬升支架(103)后端被抬升的高度,即抬升支架(103)是否形成坡度;抬升支架(103)上安装滚轮(104),滚轮(104)旋转有助于果筐沿着抬升支架(103)向下运动;转接装置(2)上安装的位移传感器(202)实时检测运输车(1)是否到达指定位置;输送带(204)把从运输车(1)运动下来的果筐输送到自动提升装置(3),完成转接工作;光电传感器A(205)、光电传感器B(206)和光电传感器C(207)能够实时检测果筐在输送带(204)上的位置,根据工况条件不同实现对电机A(201)控制;支撑板(310)上方开有凹槽,下方采用四点支撑,能够保证果筐在支撑板(310)上的稳定性;两孔连接杆(307)和三孔连接杆(308)组成平行四边形结构,横向压缩状态和纵向压缩状态的转换,完成果筐的自动提升工作;推板(305)在丝杠(304)的带动下沿着两侧滑轨(306)轨道前进和后退,把电机B(301)的旋转运动转换为推板(305)的直线运动。
具体工作过程:
作业之前,整个转载系统处于空载状态,电机A(201)停止转动,输送带(204)不运动,支撑板(310)上无果筐,工作时,运输车(1)到达装载果筐运动到指定位置,位移传感器(202)检测到运输车(1),电磁铁(106)断电,抬升支架(103)后端被抬升,果筐沿着抬升支架(103)下滑到输送带(204),电机A(201)转动,输送带(204)把果筐转接到支撑板(310),光电传感器D(311)检测到果筐,在支撑板(310)上的果筐被运走之前,若运输车(1)再次装载果筐到达指定位置,位移传感器(202)再次检测到运输车(1),电磁铁(106)再次断电,抬升支架(103)后端被抬升,果筐沿抬升支架(103)下滑到输送带(204),电机A(201)再次转动,光电传感器A(205)检测到果筐,电机A(201)停止转动,后面新运输过来的果筐在支撑板(310)上的果筐被运走之前,电机A(201)依次在光电传感器B(206)和光电传感器C(207)检测到果筐时停转,当光电传感器C(207)和光电传感器D(311)同时检测到果筐时,转接装置(2)不再转接果筐,直至光电传感器D(311)检测不到果筐,开始新的转载作业。
所述车厢(102)的前方和上方开口,方便果筐从上方放入和从前方滑出。
所述抬升支架(103)可以保持水平和形成30°倾角,具有支撑果筐和引导果筐运动的作用。
所述抬升支架(103)中间安装滚轮(104),滚轮(104)可绕自身中心轴旋转,减小果筐下行摩擦力,材料选用工业塑料。
所述光电传感器A(205)、光电传感器B(206)、光电传感器C(207)在输送带(204)同一侧线性安装,相邻间距500mm,实时检测果筐在输送带(204)的位置,根据光电传感器D(311)检测到的信号控制转接果筐的速度。
所述位移传感器(202)安装在支架(203)前方横梁中间,实时检测指定位置是否存在运输车(1),控制电机A(201)转动,实现转载系统空载状态到工作状态的转变。
所述支撑板(310)上方开有凹槽,其尺寸为400mm×300mm×20mm,下方采用四点支撑,实现果筐高度提升。
所述滑轨(306)对向安装,支撑和引导推板(305)直线运动,完成改变平行四边形压缩状态使果筐高度提升的工作。
所述运输车(1)、转接装置(2)、自动提升装置(3)直线布置,优化空间布局。
以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本实用新型的实质内容。
一种面向山地果园的果筐转载系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0