









专利摘要
本发明提供了一种基于Halbach阵列的永磁式力矩马达。本发明的永磁式力矩马达左右两部分的永磁体是镜像对称的,每侧都采用3块永磁体相连的结构;上下两块永磁体的形状相同,且充磁方向沿水平方向相反,中间一块永磁体的充磁方向竖直向上。力矩马达的中间部分包括水平方向和竖直方向的导磁体、衔铁和线圈,衔铁与上下两部分的竖直方向导磁体之间存在气隙。工作时,产生的每一路极化磁通或每一路控制磁通都先后两次通过存在的气隙。每个气隙的控制磁通和极化磁通相叠加,改变线圈中控制电流的方向,使得衔铁受顺时针或逆时针方向的电磁力矩而转动。本发明减小了力矩马达的漏磁现象,提高了磁能的利用率,使输出电磁力矩大幅提高。
权利要求
1.一种基于Halbach阵列的永磁式力矩马达,其特征在于,该力矩马达的左右两部分的永磁体是镜像对称的,每侧都采用3块永磁体相连的结构;上下两块永磁体的形状相同,且充磁方向沿水平方向相反,中间一块永磁体的充磁方向竖直向上。
2.根据权利要求1所述的基于Halbach阵列的永磁式力矩马达,其特征在于,所述的力矩马达右两部分的永磁体,上面一块永磁体的充磁方向水平向左,左侧为N极,右侧为S极,下面一块永磁体的充磁方向充磁方向水平向右,右侧为N极,左侧为S极,中间永磁体的形状为长方体,上面为N极,下面为S极。
3.根据权利要求1所述的基于Halbach阵列的永磁式力矩马达,其特征在于,所述的力矩马达的中间部分包括水平方向导磁体、竖直方向导磁体、衔铁和线圈,所述的衔铁分别与上下两部分的竖直方向导磁体之间存在气隙。
4.根据权利要求3所述的基于Halbach阵列的永磁式力矩马达,其特征在于,当线圈中通入控制电流后,产生控制磁通和极化磁通;所述的控制磁通分为上行和下行两部分,分别通过衔铁、一侧的竖直方向导磁体、水平方向导磁体和另一侧的竖直方向导磁体后再回到衔铁形成环状;力矩马达单侧的三块永磁体使单侧的极化磁通通过导磁体和衔铁后形成环形。
5.根据权利要求3或4所述的基于Halbach阵列的永磁式力矩马达,其特征在于,所述的力矩马达,其工作时产生的每一路极化磁通或每一路控制磁通都先后两次通过存在的气隙,每个气隙的控制磁通和极化磁通相叠加,改变线圈中控制电流的方向,使得衔铁受一个顺时针或逆时针方向的电磁力矩而转动。
6.根据权利要求3所述的基于Halbach阵列的永磁式力矩马达,其特征在于,所述的衔铁水平放置在中心位置,在衔铁上下侧对称布置有一块水平方向导磁体和两块竖直方向导磁体,竖直方向导磁体垂直布置在衔铁左右两端,水平方向导磁体与衔铁平行放置,且与两个竖直方向导磁体相连,在衔铁上下两侧的与水平方向导磁体之间的空间内分别布置有等量的线圈。
7.根据权利要求3或6所述的基于Halbach阵列的永磁式力矩马达,其特征在于,所述的力矩马达在装配时为衔铁设置限位钉,以限制衔铁的极限转角。
8.根据权利要求3或6所述的基于Halbach阵列的永磁式力矩马达,其特征在于,所述的竖直方向导磁体的内侧设置为斜倒角。
说明书
技术领域
本发明涉及液压领域和电磁领域,具体涉及一种基于Halbach阵列的永磁式力矩马达。
背景技术
电液伺服阀是电液伺服控制中的关键元件,它是一种接受模拟电信号后,输出调制流量和压力的液压控制阀。电液伺服阀具有动态响应快、控制精度高、使用寿命长等优点,已广泛应用于航空、航天、舰船、冶金、化工等领域的电液伺服控制系统中。电磁力矩马达是电液伺服阀的第一级,作用是将输入的电信号转化为机械信号,使衔铁偏转,以对前置级液压部分进行控制。
目前对于力矩马达的研究主要是对现有力矩马达结构的分析,比如哈尔滨工程大学刘常海在考虑导磁元件磁阻、永磁体磁阻和永磁体漏磁的情况下,对伺服阀力矩马达进行了磁路分析和电磁力矩的推导,得到伺服阀力矩马达的数学模型。针对模型线性化,存在力矩马达明显属于非线性问题以及线性化模型的阻尼系数很难估计的问题,武宏伟、赵斌利用MATLAB对力矩马达的非线性特征进行了分析,并且计算出了从输入电压到输出转角之间的动态响应和静态响应曲线。兰州理工大学王洋,针对力矩马达内各组件模型,在有限元仿真软件Adina中建立了力矩马达的有限元模型,分析了各组件的主要应力和变形区域,求解了弹簧管综合刚度与反馈弹簧刚度。通过对力矩马达进行模态分析,获得了力矩马达的前6阶固有频率与振型,阐述了在各阶固有频率下的主要振型。哈尔滨工程大学彭敬辉为揭示伺服阀自激噪声的产生机理,对伺服阀力矩马达的振动特性进行研究,通过分析喷嘴挡板式电液伺服阀的工作原理,给出了衔铁组件的受力数学模型,建立了单自由度系统的谐振响应分析数学模型,分析了谐振频率与系统固有频率的关系。同济大学訚耀保等建立了射流管伺服阀力矩马达组件的随机振动动力学模型,通过模态分析和有限元分析,得到了力矩马达组件各部件的随机振动响应功率谱密度、应变和应力值。北京理工大学姚晓先等在考虑永久磁体磁阻、气隙处漏磁和线圈漏磁的情况下,对某型号气动力矩马达的磁路进行了分析,并研究了该类力矩马达的静态特性测试方法。其它少量的研究包括充磁方向以及磁流体的使用对力矩马达性能的提升,这些研究都停留在理论仿真阶段。
力矩马达的磁路设计以及电磁场分析与结构优化是提高力矩马达性能的最重要环节之一。射流管式电液伺服阀与喷嘴挡板式电液伺服阀是目前世界上运用最普遍的典型两级流量控制伺服阀。由于射流管式电液伺服阀在国外属高端产品,主要运用于航空、航天、军事等行业,目前对国内实行限制引进。
传统力矩马达磁钢采用单一的轴向充磁,磁钢和导磁体链接部位漏磁现象严重,对于磁能的利用并不充分。对于该型力矩马达的结构优化,包括永磁结构优化和导磁体的结构优化还是一片空白。
发明内容
本发明基于射流管式电液伺服阀中的第一级进行改进,针对上述传统力矩马达存在问题,改进磁钢结构和充磁方向,使力矩马达在等体积的磁钢的情况下,获得更大的输出转矩,或在获得相等力矩的情况下,使力矩马达的整体体积和质量大幅减少。
本发明提供了一种基于Halbach阵列的永磁式力矩马达,左右两部分的永磁体是镜像对称的,每侧都采用3块永磁体相连的结构;上下两块永磁体的形状相同,且充磁方向沿水平方向相反,中间一块永磁体的充磁方向竖直向上。
所述的力矩马达的中间部分包括水平方向导磁体、竖直方向导磁体、衔铁和线圈,所述的衔铁分别与上下两部分的竖直方向导磁体之间存在气隙。
当线圈中通入控制电流后,产生控制磁通和极化磁通。所述的控制磁通分为上行和下行两部分,分别通过衔铁、一侧的竖直方向导磁体、水平方向导磁体和另一侧的竖直方向导磁体后再回到衔铁形成环状;力矩马达单侧的三块永磁体使单侧的极化磁通通过导磁体和衔铁后形成环形。
力矩马达工作时,产生的每一路极化磁通或每一路控制磁通都先后两次通过存在的气隙。每个气隙的控制磁通和极化磁通相叠加,改变线圈中控制电流的方向,使得衔铁受一个顺时针或逆时针方向的电磁力矩而转动。
本发明的优点与积极效果在于:本发明解决了传统的力矩马达的磁钢和导磁体连接处的漏磁现象严重的问题,将传统的单块磁钢分为三部分,加以不同的充磁方向进行有序排列,减小了力矩马达的漏磁现象,提高了磁能的利用率,使输出电磁力矩大幅提高。本发明的力矩马达可使电液伺服阀在负载相同的情况下,减少输入功率,或者使力矩马达的整体结构更加的紧凑。
附图说明
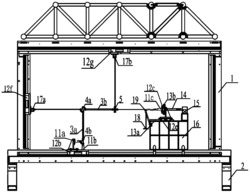
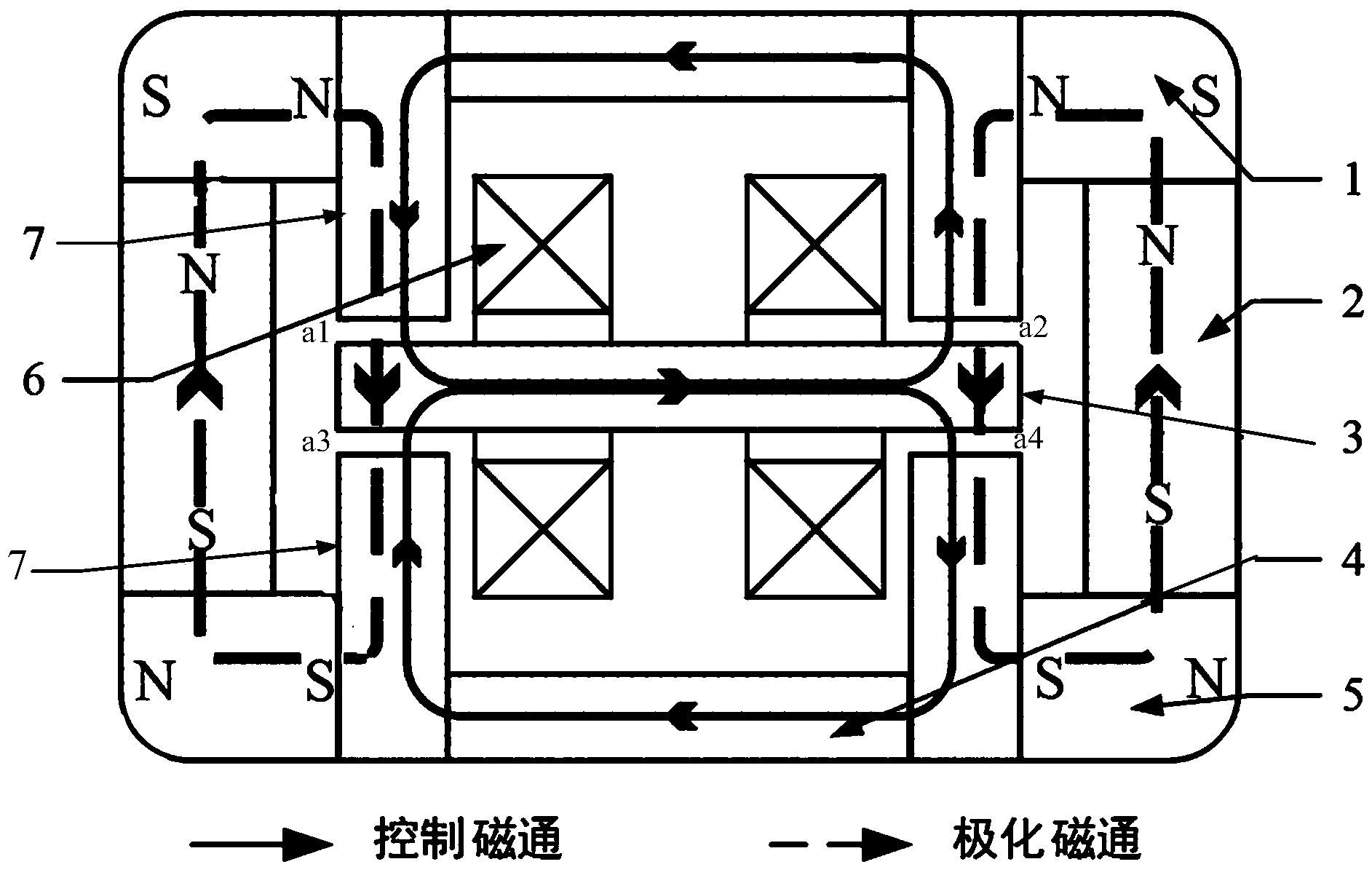
图1是本发明提供的永磁式力矩马达的工作原理图;
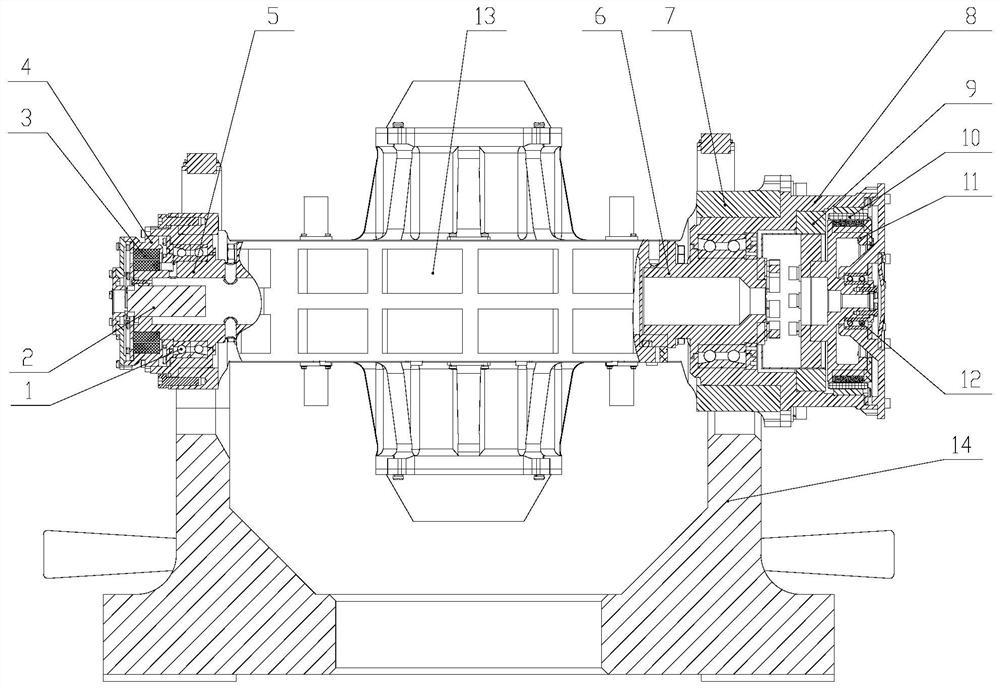
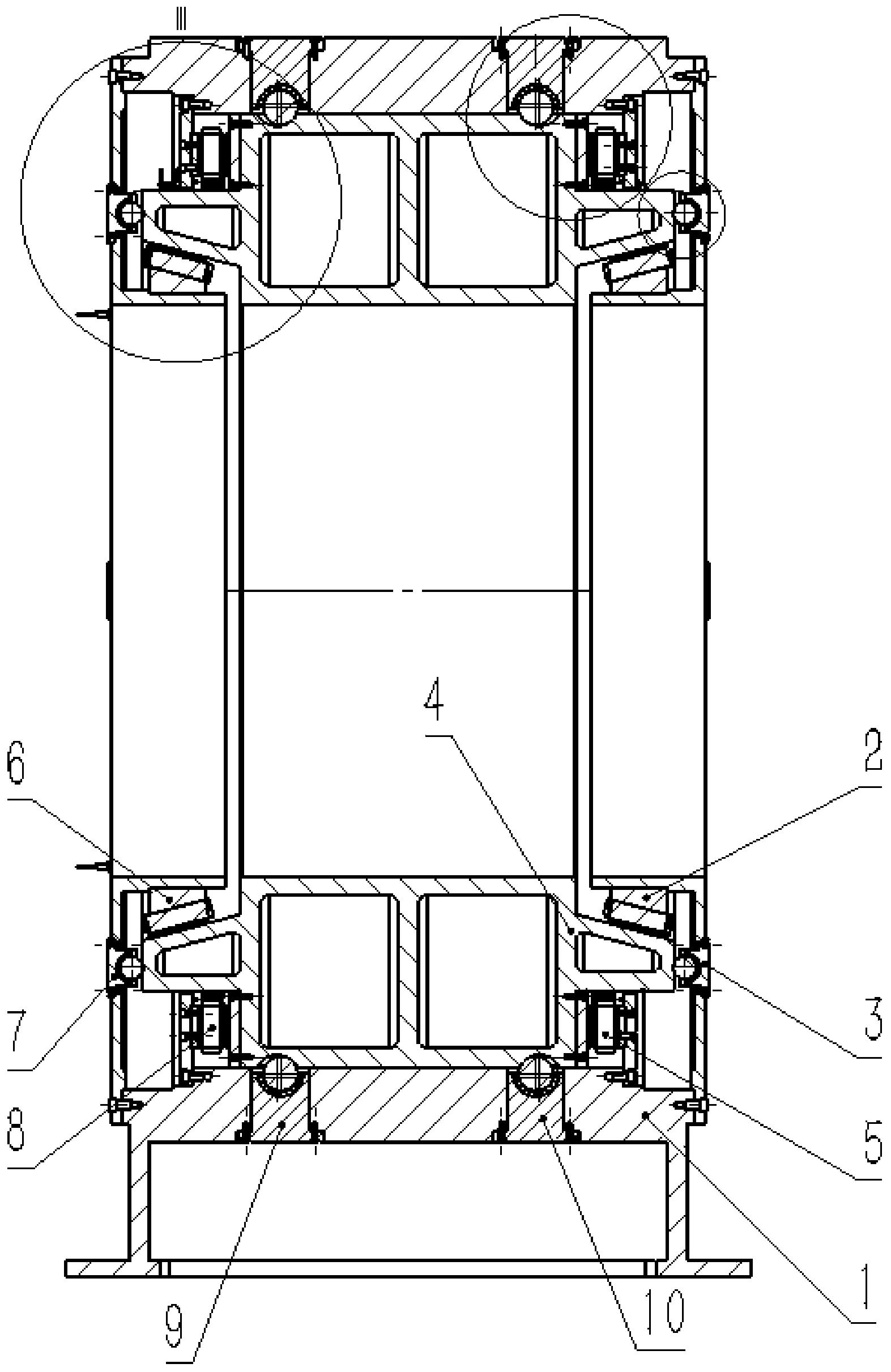
图2是本发明提供的永磁式力矩马达的一种装配方式的正视图;
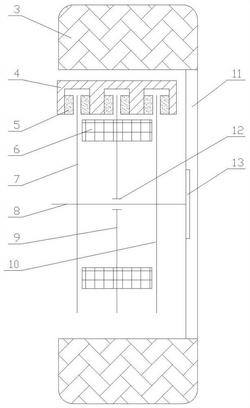
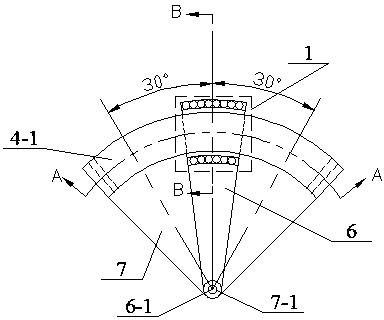
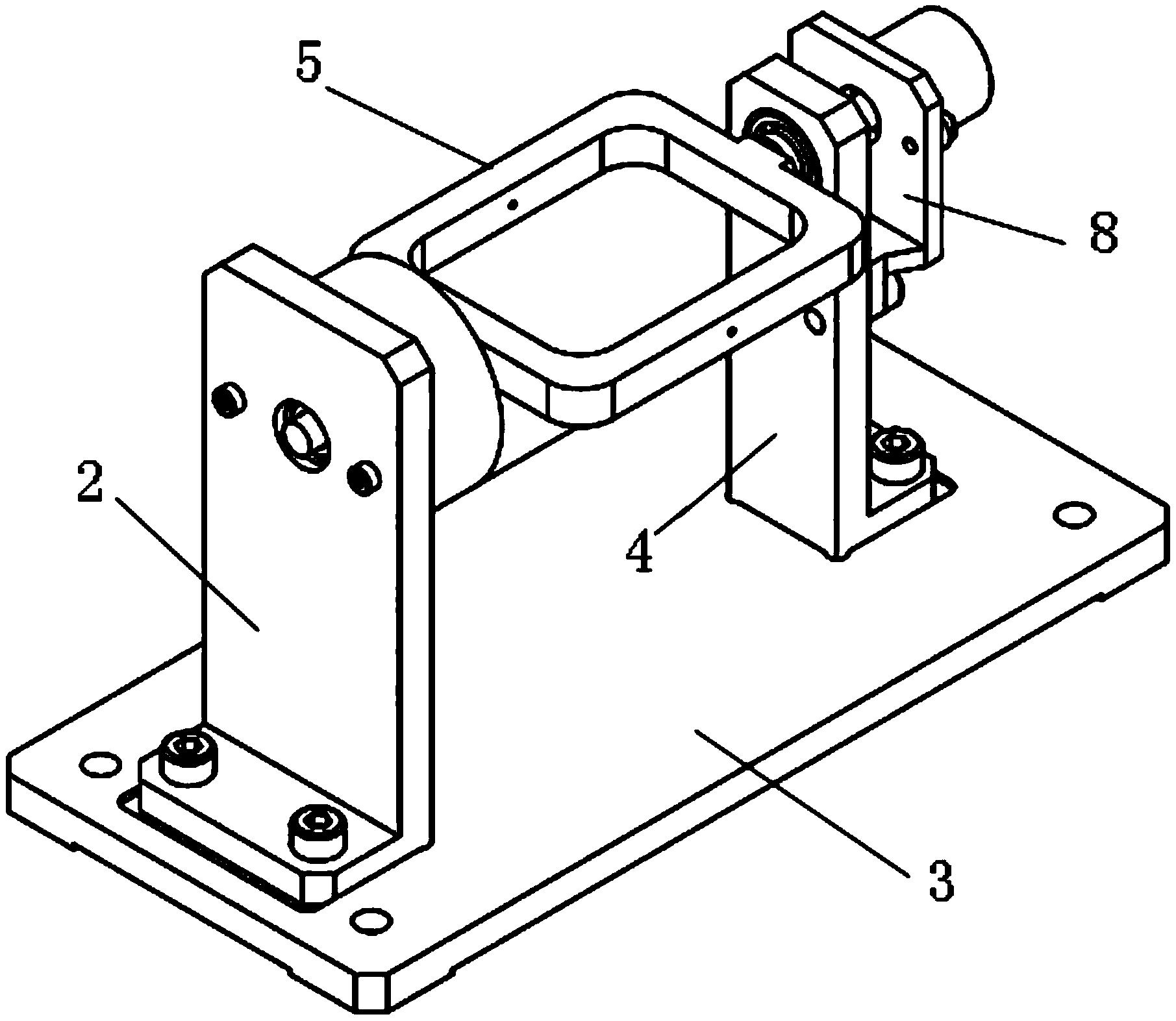
图3是本发明提供的永磁式力矩马达的一种装配方式的左视图。
具体实施方式
下面将结合附图和实施例对本发明作进一步的详细说明。
电磁力矩马达是电液伺服阀的第一级,作用是将输入的电信号转化为机械信号,使衔铁偏转,以对前置级液压部分进行控制。现有电磁力矩马达存在一整块磁铁单向充磁现象严重、磁能的利用率低的问题,而实现一块磁铁的多向充磁的技术难度较高。本发明为了提高传统力矩马达输出力矩,提高力矩马达结构的紧凑性,提出了一种新型的基于Halbach阵列的永磁体力矩马达,将传统的单块磁钢分为三部分,加以不同的充磁方向进行有序排列,极大地减少漏磁现象,使磁通更好地束缚在永磁体和导磁体结构内,使得可在等体积的磁钢的情况下,获得更大的输出转矩;或在获得相等力矩的情况下,使力矩马达的整体体积和质量大幅减少。
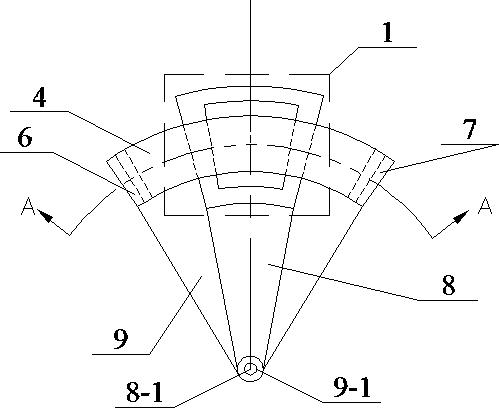
如图1所示,本发明的永磁体力矩马达包括三部分,左右两部分为对称结构,每部分包括3块永磁体,中间部分包括水平方向导磁体、竖直方向导磁体、衔铁和线圈。本发明改变传统单侧整块永磁体结构,采用单侧3块永磁体相连的方式,并改变原有的充磁方向,使在相同的永磁体体积时获得最大的磁能利用率,即使力矩马达的极化磁通增大,可以使力矩马达在输入相同的控制电流时得到更大的输出转矩。
左右两部分的永磁体的布置是镜像对称的,此处以右侧为例说明,三块永磁体分别为1号永磁体、2号永磁体和5号永磁体。1号和5号两块永磁体水平放置,2号永磁体竖直放置在1号和5号永磁体之间。1号和5号两块永磁体的形状相同,充磁方向相反。1号永磁体的充磁方向水平向左,左侧为N极,右侧为S极;5号永磁体的充磁方向水平向右,右侧为N极,左侧为S极。中间2号永磁体的形状为长方体,充磁方向竖直向上,上面为N极,下面为S极。
中间部分的衔铁3、水平方向导磁体4和竖直方向导磁体7为软磁性材料,衔铁3水平放置在中心位置,关于衔铁3对称布置上下两部分的水平方向导磁体4和竖直方向导磁体7。在衔铁3上下两侧布置有等量的线圈6。衔铁3可绕中心顺时针或逆时针旋转输出电磁力矩。竖直方向导磁体7垂直布置在衔铁3左右两端,上下各两块。水平方向导磁体4为水平方向布置,上下各一块,与衔铁3平行放置,且与两个竖直方向导磁体7相连,如图1所示。水平方向导磁体4和竖直方向导磁体7,可以做成分块结构,如所用导磁体是不同材料时,可以做成分块结构;也可以做成一个整体结构,当是同种材料时,可考虑合成一个整体结构,可实际中加工成一体。漆包线绕成的线圈6位于水平方向导磁体4和衔铁3之间的空间内。当力矩马达工作时在线圈6中通入控制电流,根据右手定则,通电线圈产生控制磁通。单侧的三块永磁体按图1所示N极和S极顺序排列,使单侧的极化磁通通过导磁体和衔铁后形成环形。通入控制电流后产生控制磁通,若控制磁通自左向右通过衔接,如图1所示,控制磁通分为上行和下行两部分,分别通过衔铁、一侧竖直方向导磁体、水平方向导磁体和另一侧竖直方向导磁体后再回到衔铁形成环状。
每一路极化磁通或每一路控制磁通都会先后两次通过气隙,如图1所示,衔铁3分别与上下两部分的竖直方向导磁体7之间存在气隙,从左到右、从上到下依次编号为a1~a4。左侧的极化磁通顺时针通过气隙a1、气隙a3;右侧的极化磁通逆时针通过气隙a2、气隙a4;上路的控制磁通逆时针通过气隙a2、气隙a1;下路的控制磁通顺时针通过气隙a4、气隙a3。每个气隙的控制磁通和极化磁通相叠加,即在气隙a1、a4中两个磁通相加,而在气隙a2、a3中两个磁通相减,使气隙a1、a4中的磁通大于气隙a2、a3中的磁通。由于气隙的磁通越大,单位面积的磁场强度越大,产生的电磁吸力越大,因此衔铁左端电磁吸引力的合力方向上,而右侧吸引力向下,使衔铁受一个顺时针方向的电磁力矩而顺时针转动。当改变线圈中控制电流的方向,使控制磁通自右向左通过衔铁,使上下路的控制磁通反向,而左右两侧永磁体的极化磁通不变,则控制磁通和极化磁通相互叠加时,气隙a1、a4中两个磁通相减,而气隙a2、a3中的两个磁通相加,使气隙a1、a4中的磁通小于气隙a2、a3中的磁通,衔铁左端电磁吸引力的合力向下,而右侧吸引力向上,使衔铁受一个逆时针方向的电磁力矩而逆时针转动。
由于单侧Halbach型力矩马达的永磁体是由三块永磁体阵列而成,局部不可避免出现同级相斥的现象,这种排斥力是不可预判的,所以需要外加装配结构使同侧三块永磁体准确地束缚在装配位置。本发明提供了一种安装方式,如图2和3所示,为Halbach型力矩马达装配正视图和左视图。限位钉8用于限制力矩马达衔铁的极限转角。本发明实施例将水平方向导磁体和竖直方向导磁体设计为同种材料,并设计为一体结构,如图2中导磁体9所示。导磁体9为永磁体产生的极化磁通和控制电流产生的控制磁通提供磁路,其中导磁体竖直方向内侧设置为一斜倒角,是为了在不影响磁路的情况下使产生的电磁力矩的力臂尽量加长,使输出力矩尽可能提高。漆包线绕成的线圈6放置在线圈支架10上,根据力矩马达的输出性能要求可以设计出相应的线圈层数和匝数,左右两侧对称在线圈支架10上绕上线圈,通入控制电流后可以产生控制磁通,改变控制电流的方向即可改变控制磁通的方向,进而改变气隙磁场强度的叠加状态而改变衔铁的转向。线圈支架10需要和衔铁3之间留出足够的空间,避免衔铁旋转时与线圈支架产生干涉。两个线圈支架10之间的距离和位置的定位是靠最下永磁体5的定位面限制的,两个线圈支架10的总高度即是上下永磁体1,5之间的距离。本发明实施例中力矩马达的衔铁3,与传动力矩马达衔铁相同,是靠前后两个弹簧片限制在平衡位置的,是力矩马达的输出结构。上下永磁体1,5的充磁方向相反,二者中间为同种材料长方体磁铁2。磁钢外保持架14内部腔体的形状尺寸与单组三块永磁体装配后的形状尺寸相配合,在磁钢外保持架14内固定安装有磁钢内支撑板11,通过螺栓13、螺母12锁紧磁钢内支撑板11,以限制同侧两组磁钢左右方向的位移,通过螺栓15、螺母16固定锁紧磁钢内支撑板11后,限制了同侧两组磁钢的前后方向的位移。同时,磁钢外保持架14的上下前沿与上下导磁体4相配合,由此保证了导磁体与永磁体的位置关系。另外在磁钢外保持架14的各个面上加工了螺纹孔,用于顶丝调整永磁体在腔体内的位置。顶丝17可以消除上下永磁体与中间永磁体的安装间隙,顶丝18可以使上中下三块永磁体紧靠导磁体和磁钢外保持架的腔体内壁,顶丝19可以保证上中下三块永磁体紧靠磁钢内支撑板。另外,在磁钢外保持架14上留出槽口,以便观察永磁体之间以及永磁体与导磁体之间的贴合情况。
基于Halbach阵列的永磁式力矩马达专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0