








专利摘要
本发明属于多相流混合特性领域,并具体公开了一种实时获取声共振混合机运行过程中固有频率的方法。所述方法包括:采集声共振混合机混合容器部分的实时加速度信号以及声共振混合机电机转动的脉冲数,以此得到位移信号和激振力;根据位移信号和频响函数模型,提取该频响函数模型的m个模态参数,并输出该频响函数模型的曲线图;构建模态参数拟合模型,任意选取m‑1个模态参数输入模态参数拟合模型得到模态参数拟合曲线,将模态参数拟合曲线和频响函数模型的曲线图进行方差处理,并根据该方差值最小的模态参数拟合曲线中的m‑1个模态参数进行虚假模态参数剔除,以此获取真实模态参数。本发明得所计算的结果能够真实的反应声共振混合机的固有频率。
权利要求
1.一种实时获取声共振混合机运行过程中固有频率的方法,其特征在于,包括以下步骤:
S1在声共振混合机运行过程中,采集声共振混合机混合容器部分的实时加速度信号以及声共振混合机电机转动的脉冲数;
S2对所述混合容器部分的实时加速度信号进行滤波和积分处理,得到位移信号,根据电机的相位差以及所述脉冲数计算声共振混合机的激振力;
S3根据所述位移信号和激振力构建位移信号和激振力的频响函数模型,提取该频响函数模型的m个模态参数,并输出该频响函数模型的曲线图;
S4构建模态参数拟合模型,任意选取m-1个模态参数输入模态参数拟合模型得到模态参数拟合曲线,将模态参数拟合曲线和频响函数模型的曲线图进行方差处理,得到模态参数拟合曲线和响函数模型的曲线图的方差值;
S5重复步骤S4,直至遍历m个模态参数,从而获取m个方差值,剔除方差值最小的模态参数拟合曲线中未选取的模态参数;
S6令m=m-1,若m>N,则重复步骤S4和S5,直至m=N,其中N为声共振混合机运行过程中的自由度数,获取声共振混合机运行过程中的N个真实模态参数;若m=N,则结束迭代计算,获取声共振混合机运行过程中的N个真实模态参数,然后根据所需频带从该N个真实模态参数中确定所需声共振混合机运行过程中的固有频率。
2.根据权利要求1所述的一种实时获取声共振混合机运行过程中固有频率的方法,其特征在于,步骤S2中对所述混合容器部分的实时加速度信号进行滤波和积分处理具体包括以下步骤:
采用一阶RC低通滤波模型对所述混合容器部分的实时加速度信号进行低通滤波处理;然后采用一阶RC高通滤波模型对经低通滤波处理后的实时加速度信号进行高通滤波处理;接着,对经高通滤波处理后的实时加速度信号进行积分,从而获取速度信号;最后对所述速度信号进行处理,得到位移信号。
3.根据权利要求2所述的一种实时获取声共振混合机运行过程中固有频率的方法,其特征在于,所述一阶RC低通滤波模型为:
Y(n)=a·X(n)+(1-a)·Y(n-1)
所述一阶RC高通滤波模型为:
Y’(n)=a·[X(n)-X(n-1)]+a·Y(n-1)
其中,X(n)为实时加速度信号;Y(n-1)为第n-1次的滤波输出值;a为滤波系数;Y(n)为第n次的滤波输出值。
4.根据权利要求1所述的一种实时获取声共振混合机运行过程中固有频率的方法,其特征在于,步骤S3中根据所述位移信号和激振力构建位移信号和激振力的频响函数模型具体包括以下步骤:
S311计算激振力的自功率谱:
其中,G
S312计算位移信号的互功率谱:
其中,G
S313构建位移信号和激振力的频响函数模型:
其中,H
5.根据权利要求1所述的一种实时获取声共振混合机运行过程中固有频率的方法,其特征在于,步骤S3中提取该频响函数模型的m个模态参数具体包括以下步骤:
S321构建声共振混合机运行过程中的动态特性模型:
其中,f(t)为声共振混合机的N维力向量;
S322构建声共振混合机的传递函数矩阵模型:
H(s)=C[sI-A]
其中,s传递函数矩阵模型的变量,I为单位矩阵;
S323构建位移信号与传递函数矩阵模型的关系模型:
[s
S324构建加速度与力的传递函数的关系模型:
[s
其中,H
S325构建超定方程组
6.根据权利要求1所述的一种实时获取声共振混合机运行过程中固有频率的方法,其特征在于,步骤S4具体包括以下步骤:
S41构建N自由度声共振混合机运行过程中的模态参数拟合模型:
H
其中,H
S42从m个模态参数中依次选出m-1个模态参数,将该m-1个模态参数输入N自由度声共振混合机运行过程中的模态参数拟合模型中,然后对N自由度声共振混合机运行过程中的模态参数拟合模型进行曲线拟合,然后求取曲线拟合后的N自由度声共振混合机运行过程中的模态参数拟合模型和频响函数模型的曲线的方差Δ。
7.根据权利要求6所述的一种实时获取声共振混合机运行过程中固有频率的方法,其特征在于,所述方差Δ的计算模型为:
式中,H
8.根据权利要求1所述的一种实时获取声共振混合机运行过程中固有频率的方法,其特征在于,步骤S2中,所述激振力的计算模型为:
其中,F
说明书
技术领域
本发明属于多相流混合特性领域,更具体地,涉及一种实时获取声共振混合机运行过程中固有频率的方法。
背景技术
声共振混合机与传统混合机相比,具有混合时间短、效率高、安全性高等优点,对于高粘度物料、大分子量材料、高价值粉末物料,以及具有危险性的物料而言,其优点更加明显。声共振混合机主要是利用了设备在共振点处运行时具有功耗较低、混合强度较高的特点,所以共振点的识别对于声共振混合机尤为重要。
现有声共振混合机对于系统固有频率的识别主要是采用以下两种方法来实现的:第一种方法,在设备启动阶段对系统进行扫频,识别出系统的固有频率,而后在运行过程中认为此系统的固有频率近似保持不变,并以此作为系统的控制参数;第二种方法,仍在设备启动阶段对系统进行扫频,但在后面的运行过程中,以系统在共振点处的特征为目标,对系统进行连续调节。实际上,在混合过程中,混合锅内物料的阻尼变化,以及物料的溅起等,会导致系统的固有频率在时刻发生微小变化。特别是当有成团的物料溅起时,系统固有频率的变化会对设备运行产生较为明显的影响,从而导致设备在运行过程中出现不稳定的情况,当混合较为剧烈时出现这种情况甚至会对设备造成极大的损坏以及威胁到操作人员的人身安全。
因此,本领域亟待提出一种实时获取声共振混合机运行过程中固有频率的方法,使得所计算的结果能够真实的反应声共振混合机的固有频率,进而能有效控制声共振混合机根据所得固有频率控制设备运行,达到维持设备始终在共振点处稳定运行的目的。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种实时获取声共振混合机运行过程中固有频率的方法,其中结合声共振混合机运行过程中的自身的特征及其固有频率的实时计算方法的特点,相应的声共振混合机运行过程中的固有频率和混合容器内物料的阻尼变化等导致声共振混合机在运行过程中出现不稳定的情况进行了分离,即提取了声共振混合机在运行过程中的真实模态和虚假模态,并剔除其中的虚假模态,根据其真实模态来构建和获取声共振混合机的固有频率。本发明使得所计算的结果能够真实的反应声共振混合机的固有频率,进而能有效控制声共振混合机根据所得固有频率控制设备运行,达到维持设备始终在共振点处稳定运行的目的。
为实现上述目的,本发明提出了一种实时获取声共振混合机运行过程中固有频率的方法,包括以下步骤:
S1在声共振混合机运行过程中,采集声共振混合机混合容器部分的实时加速度信号以及声共振混合机电机转动的脉冲数;
S2对所述混合容器部分的实时加速度信号进行滤波和积分处理,得到位移信号,根据电机的相位差以及所述脉冲数计算声共振混合机的激振力;
S3根据所述位移信号和激振力构建位移信号和激振力的频响函数模型,提取该频响函数模型的m个模态参数,并输出该频响函数模型的曲线图;
S4构建模态参数拟合模型,任意选取m-1个模态参数输入模态参数拟合模型得到模态参数拟合曲线,将模态参数拟合曲线和频响函数模型的曲线图进行方差处理,得到模态参数拟合曲线和响函数模型的曲线图的方差值;
S5重复步骤S4,直至遍历m个模态参数,从而获取m个方差值,剔除方差值最小的模态参数拟合曲线中未选取的模态参数;
S6令m=m-1,若m>N,则重复步骤S4和S5,直至m=N,其中N为声共振混合机运行过程中的自由度数,获取声共振混合机运行过程中的N个真实模态参数;若m=N,则结束迭代计算,获取声共振混合机运行过程中的N个真实模态参数,然后根据所需频带从该N个真实模态参数中确定所需声共振混合机运行过程中的固有频率。
作为进一步优选的,步骤S2中对所述混合容器部分的实时加速度信号进行滤波和积分处理具体包括以下步骤:
采用一阶RC低通滤波模型对所述混合容器部分的实时加速度信号进行低通滤波处理;然后采用一阶RC高通滤波模型对经低通滤波处理后的实时加速度信号进行高通滤波处理;接着,对经高通滤波处理后的实时加速度信号进行积分,从而获取速度信号;最后对所述速度信号进行处理,得到位移信号。
作为进一步优选的,所述一阶RC低通滤波模型为:
Y(n)=a·X(n)+(1-a)·Y(n-1)
所述一阶RC高通滤波模型为:
Y’(n)=a·[X(n)-X(n-1)]+a·Y(n-1)
其中,X(n)为实时加速度信号;Y(n-1)为第n-1次的滤波输出值;a为滤波系数;Y(n)为第n次的滤波输出值。
作为进一步优选的,步骤S3中根据所述位移信号和激振力构建位移信号和激振力的频响函数模型具体包括以下步骤:
S311计算激振力的自功率谱:
其中,GFF为激振力的自功率谱;P为采集的实时加速度信号的个数;Fi为第i个实时激振力的离散傅里叶变换; 为Fi的共轭;
S312计算位移信号的互功率谱:
其中,GXF为位移信号与激振力的互功率谱;Xi为第i个位移信号的离散傅里叶变换;
S313构建位移信号和激振力的频响函数模型:
其中,H1为位移信号和激振力的频响函数模型。
作为进一步优选的,步骤S3中提取该频响函数模型的m个模态参数具体包括以下步骤:
S321构建声共振混合机运行过程中的动态特性模型:
其中,f(t)为声共振混合机的N维力向量; x分别为声共振混合机的N维加速度、速度和位移向量;M、C、K分别为声共振混合机的质量矩阵、声共振混合机的阻尼矩阵和声共振混合机的刚度矩阵, y(t)=Qx(t), h(t)表示N×Ni声共振混合机的脉冲响应矩阵,N为声共振混合机的自由度,Ni为输入脉冲数的个数;u(t)为变量矩阵;y(t)为位移信号矩阵;A为状态转移矩阵;B为激振力系数矩阵;Q为位移信号系数矩阵;
S322构建声共振混合机的传递函数矩阵模型:
H(s)=C[sI-A]
其中,s传递函数矩阵模型的变量,I为单位矩阵;
S323构建位移信号与传递函数矩阵模型的关系模型:
[s
S324构建加速度与力的传递函数的关系模型:
[s
其中,Ha(s)为加速度与激振力的传递函数;
S325构建超定方程组 然后根据步骤S321至步骤S324构建的四个模型求解超定方程组的特征值和特征向量,其中,超定方程组的特征值和特征向量即为该频响函数模型的极值点和m个模态参数。
作为进一步优选的,步骤S4具体包括以下步骤:
S41构建N自由度声共振混合机运行过程中的模态参数拟合模型:
H2=H1(ω)+…+Hm-1(ω)
其中,H(ω)为某一自由度声共振混合机运行过程中的模态参数拟合模型, X为位移信号;F为激振力;ω为固有频率;H1(ω)为第1个声共振混合机运行过程中的模态参数,Hm-1(ω)为第m-1个声共振混合机运行过程中的模态参数;
S42从m个模态参数中依次选出m-1个模态参数,将该m-1个模态参数输入N自由度声共振混合机运行过程中的模态参数拟合模型中,然后对N自由度声共振混合机运行过程中的模态参数拟合模型进行曲线拟合,然后求取曲线拟合后的N自由度声共振混合机运行过程中的模态参数拟合模型和频响函数模型的曲线的方差Δ。
作为进一步优选的,所述方差Δ的计算模型为:
式中,H1i和H2i分别为曲线拟合后的N自由度声共振混合机运行过程中的模态参数拟合模型和频响函数模型的曲线在横坐标点i处对应纵坐标的取值,n为曲线横坐标点的个数,n为大于1的整数。
作为进一步优选的,步骤S2中,所述激振力的计算模型为:
其中,F合为激振力,F为电机的单个偏心块所产生的离心力;m为电机的单个偏心块的质量;ω为电机的偏心块的转速;r为电机的偏心块的重心到旋转中心的距离;t为电机的转动时间,θ差为偏心块的相位差,θ和为偏心块的相位和。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
1.本发明能够根据当前采集信号,对其中真实模态和虚假模态进行区分,并剔除其中的虚假模态,使得所计算的结果能够真实的反应声共振混合机的固有频率,进而能有效控制声共振混合机根据所得固有频率控制设备运行,达到维持设备始终在共振点处稳定运行的目的。
2.本发明采用滤波、积分等信号处理方式,能够将采集到的原始加速度信号进行去噪处理,并处理成位移信号。能够根据采集到的原始加速度信号,得到较为光滑位移信号波形图,反映出系统负载端的实时位移情况,并为后续的位移信号与激振力的频响函数计算做准备。
3.本发明能够根据位移信号与激振力构建位移信号与激振力的频响函数模型,并进行频响函数的求解,然后根据求解出的频响函数求解出系统的m个模态参数。能够根据之前处理后的位移信号与激振力实时计算出系统在不同工作状态下的模态参数。
4.本发明能够对识别出的所有系统模态参数进行虚假模态剔除,只保留系统的各个真实模态。然后,即可根据所需频带,从真实模态中选取所需要的那一阶模态参数,即可得到所需的系统共振频率。
附图说明
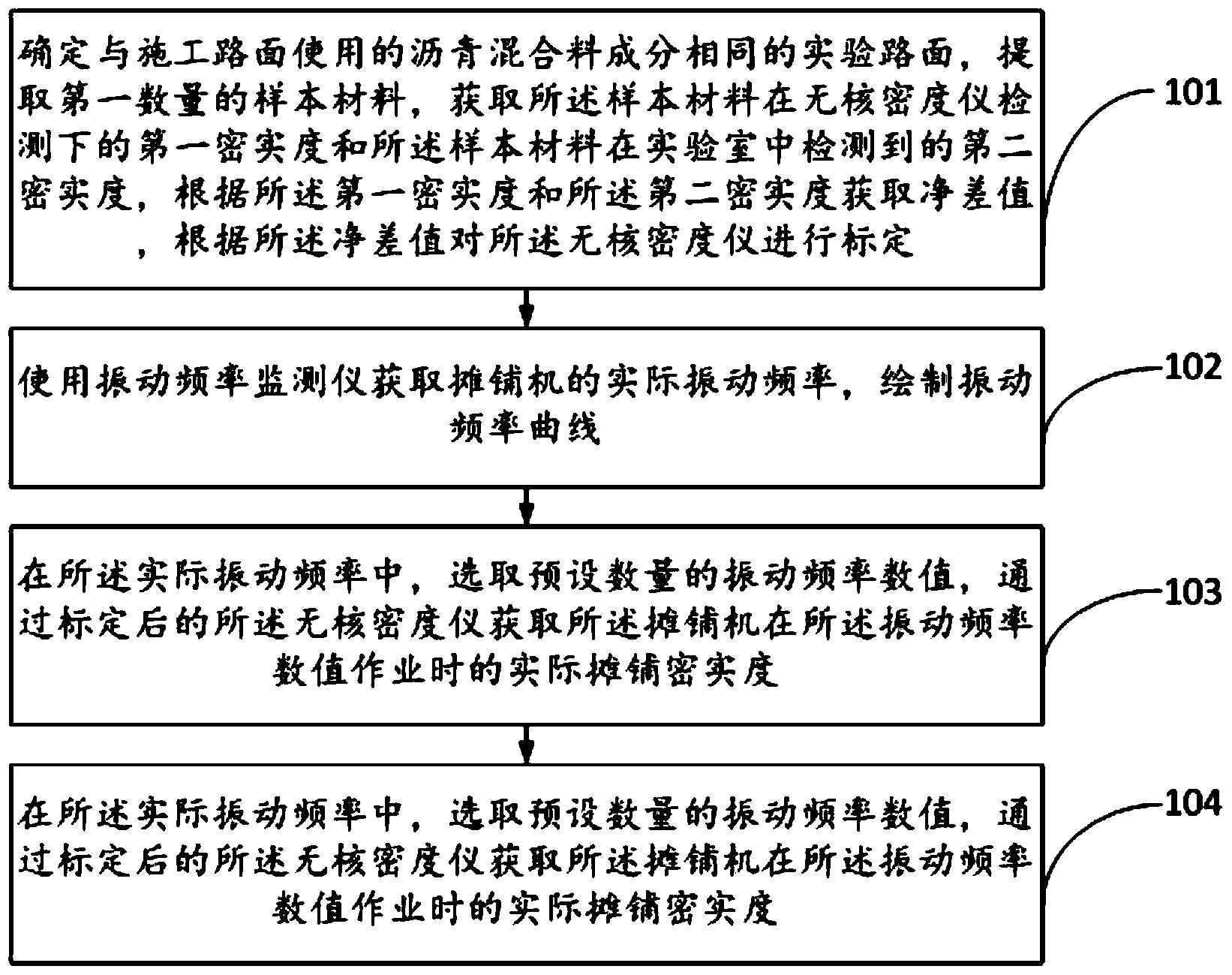
图1是本发明实施例涉及的一种实时获取声共振混合机运行过程中固有频率的方法的流程图;
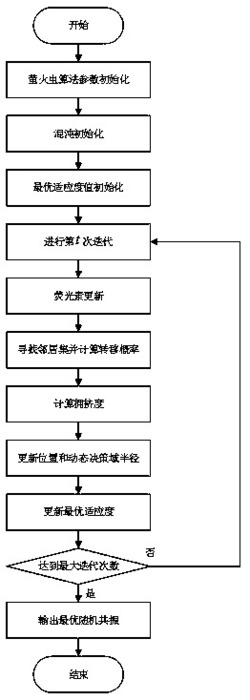
图2是图1中涉及的剔除虚假模态,得到系统固有频率的流程图;
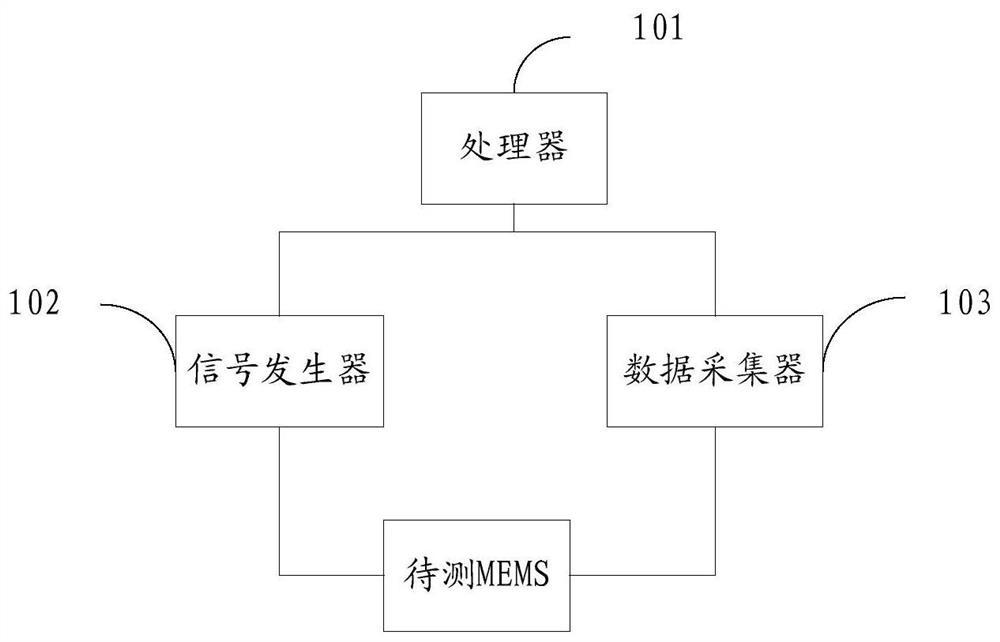
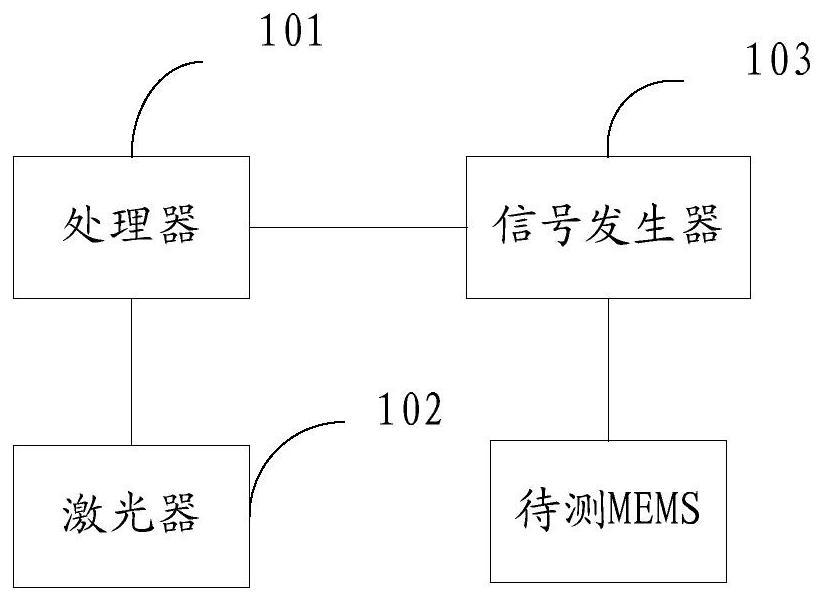
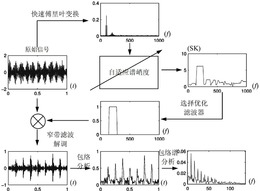
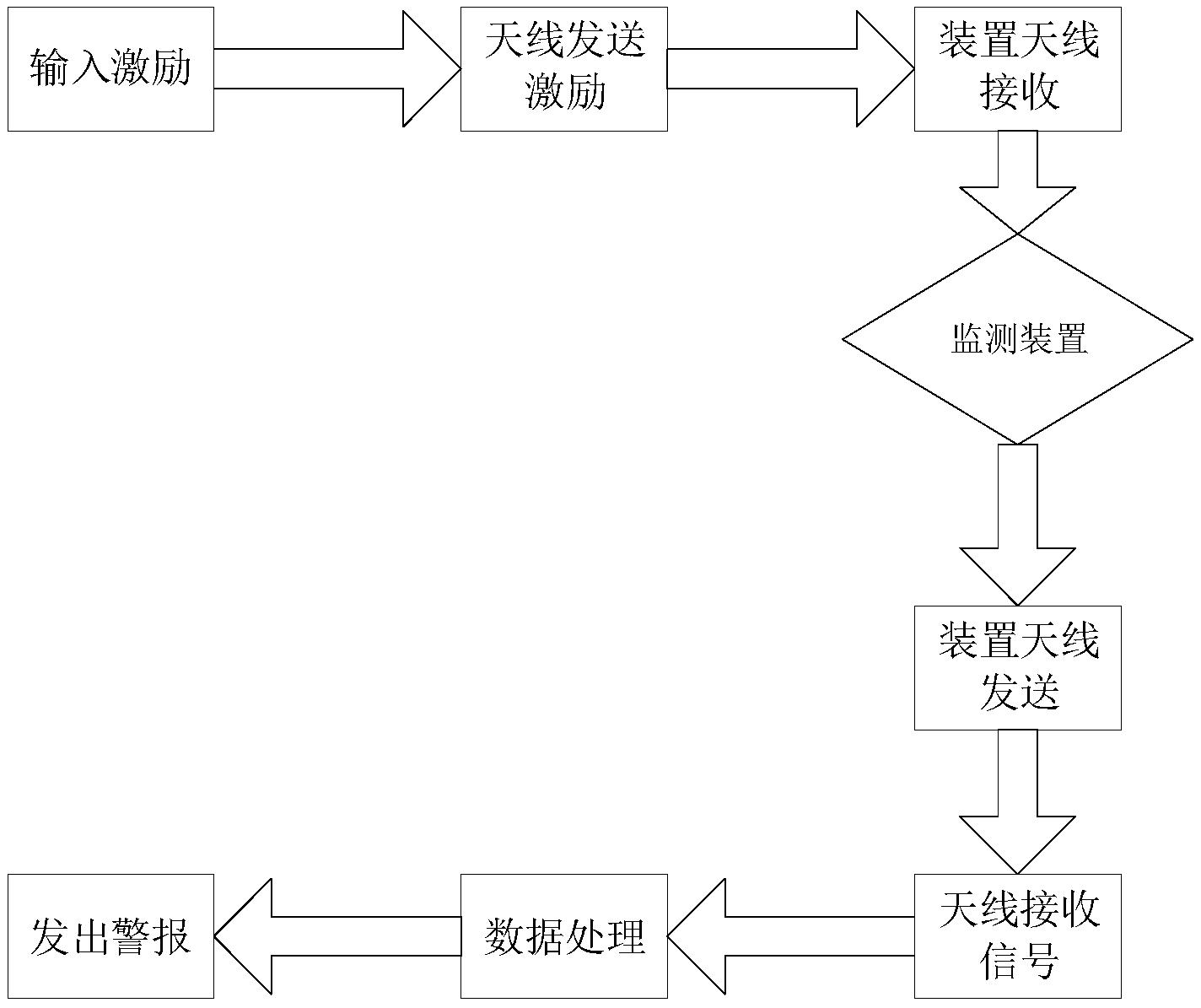
图3是本发明实施例涉及的一种声共振混合机的信号传递流程图;
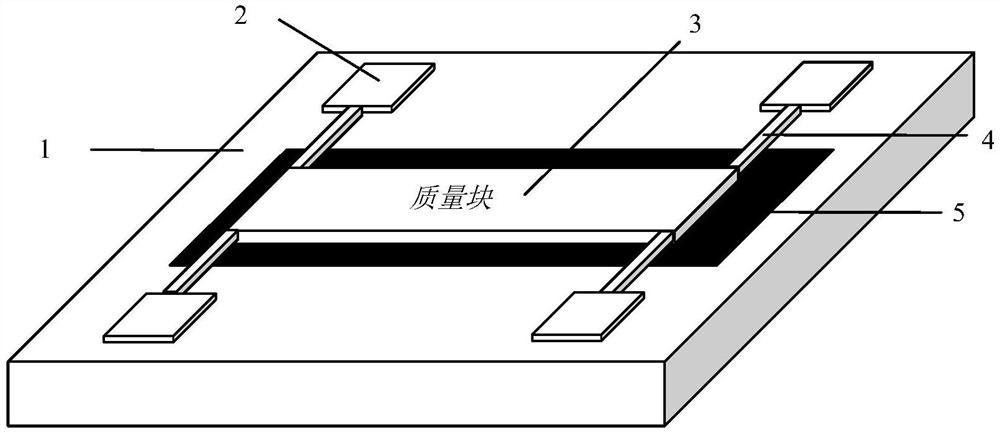
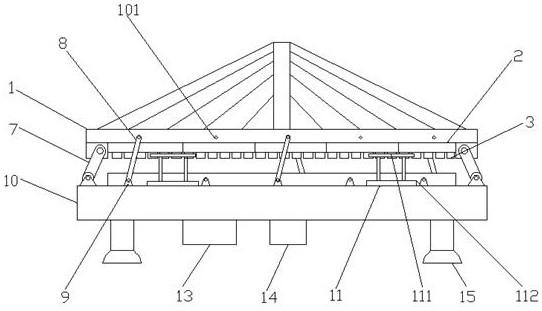
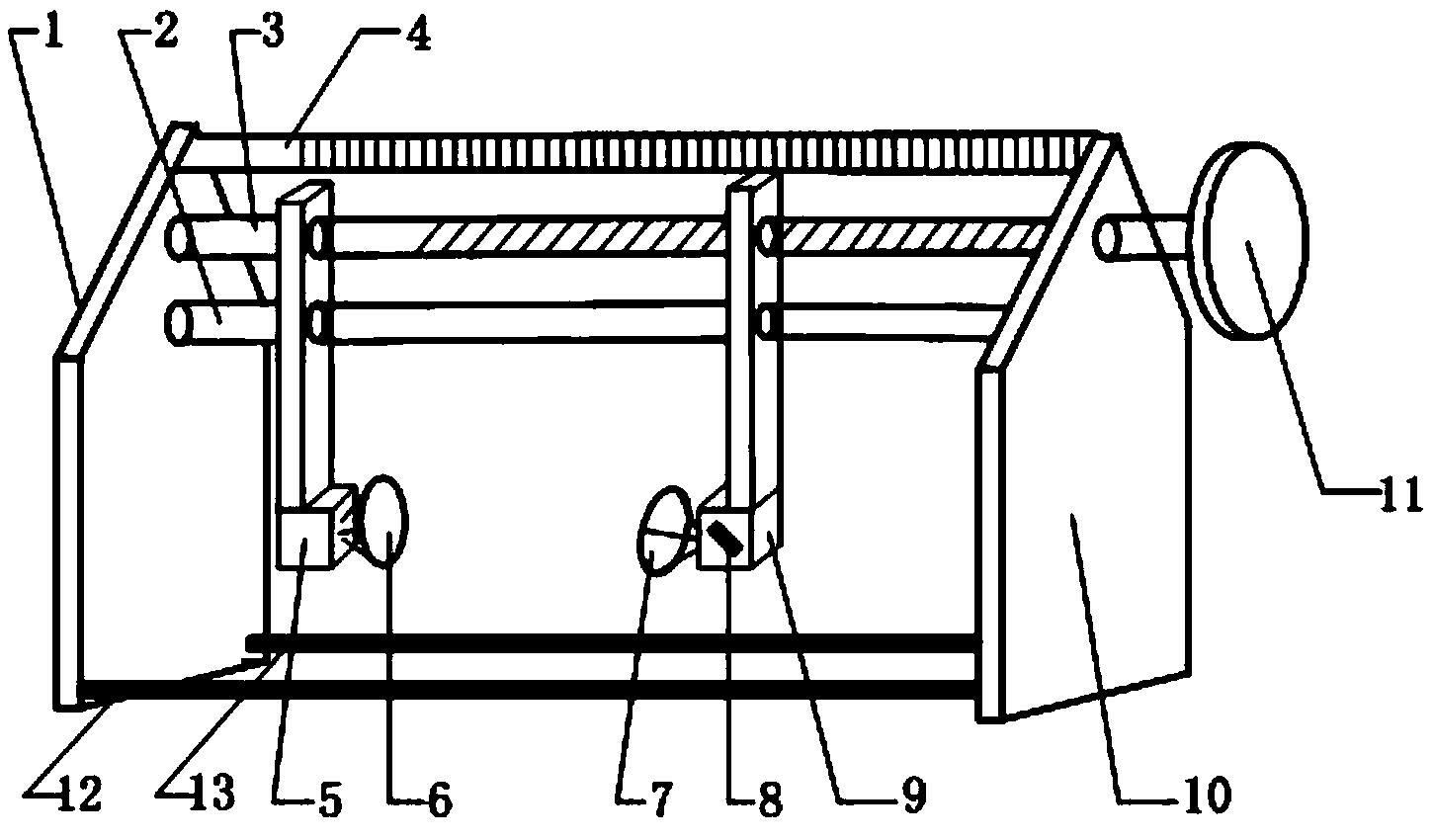
图4是本发明实施例涉及的一种声共振混合机的结构示意图;
图5是本发明实施例涉及的一种声共振混合机的电机的偏心结构示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
如图1、图2、图3、图4以及图5所示,本发明一种实时获取声共振混合机运行过程中固有频率的方法,包括以下步骤:
S1在声共振混合机运行过程中,采集声共振混合机混合容器部分的实时加速度信号以及声共振混合机电机转动的脉冲数。
S2对所述混合容器部分的实时加速度信号进行滤波和积分处理,得到位移信号,根据电机的相位差以及所述脉冲数计算声共振混合机的激振力。
其中,对所述混合容器部分的实时加速度信号进行滤波和积分处理具体包括以下步骤:采用一阶RC低通滤波模型对所述混合容器部分的实时加速度信号进行低通滤波处理;然后采用一阶RC高通滤波模型对经低通滤波处理后的实时加速度信号进行高通滤波处理;接着,对经高通滤波处理后的实时加速度信号进行积分,从而获取速度信号;最后对所述速度信号进行处理,得到位移信号。
进一步而言,所述一阶RC低通滤波模型为:
Y(n)=a·X(n)+(1-a)·Y(n-1)
所述一阶RC高通滤波模型为:
Y’(n)=a·[X(n)-X(n-1)]+a·Y(n-1)
其中,X(n)为实时加速度信号;Y(n-1)为第n-1次的滤波输出值;a为滤波系数;Y(n)为第n次的滤波输出值。
所述激振力的计算模型为:
其中,F合为激振力,F为电机的单个偏心块所产生的离心力;m为电机的单个偏心块的质量;ω为电机的偏心块的转速;r为电机的偏心块的重心到旋转中心的距离;t为电机的转动时间,θ差为偏心块的相位差,θ和为偏心块的相位和。
S3根据所述位移信号和激振力构建位移信号和激振力的频响函数模型,提取该频响函数模型的m个模态参数,并输出该频响函数模型的曲线图。
步骤S3中根据所述位移信号和激振力构建位移信号和激振力的频响函数模型具体包括以下步骤:
S311计算激振力的自功率谱:
其中,GFF为激振力的自功率谱;P为采集的实时加速度信号的个数;Fi为第i个实时激振力的离散傅里叶变换; 为Fi的共轭;
S312计算位移信号的互功率谱:
其中,GXF位移信号与激振力的互功率谱;Xi为第i个测点的位移信号的离散傅里叶变换;
S313构建位移信号和激振力的频响函数模型:
其中,H1为位移信号和激振力的频响函数模型。
提取该频响函数模型的m个模态参数具体包括以下步骤:
S321构建声共振混合机运行过程中的动态特性模型:
其中,f(t)为声共振混合机的N维力向量; x分别为声共振混合机的N维加速度、速度和位移向量;M、C、K分别为声共振混合机的质量矩阵、声共振混合机的阻尼矩阵和声共振混合机的刚度矩阵, y(t)=Qx(t), h(t)表示N×Ni声共振混合机的脉冲响应矩阵,N为声共振混合机的自由度,Ni为输入脉冲数的个数;u(t)为变量矩阵;y(t)为位移信号矩阵;A为状态转移矩阵;B为激振力系数矩阵;Q为位移信号系数矩阵;
S322构建声共振混合机的传递函数矩阵模型:
H(s)=C[sI-A]
其中,s为传递函数矩阵模型的变量,一般用s表示,I为单位矩阵;
S323构建位移信号与传递函数矩阵模型的关系模型:
[s
S324构建加速度与力的传递函数的关系模型:
[s
其中,Ha(s)为加速度与激振力的传递函数;
S325构建超定方程组 然后根据步骤S321至步骤S324构建的四个模型求解超定方程组的特征值和特征向量,其中,超定方程组的特征值和特征向量即为该频响函数模型的极值点和m个模态参数。
S4构建模态参数拟合模型,任意选取m-1个模态参数输入模态参数拟合模型得到模态参数拟合曲线,将模态参数拟合曲线和频响函数模型的曲线图进行方差处理,得到模态参数拟合曲线和响函数模型的曲线图的方差值。
步骤S4具体包括以下步骤:
S41构建N自由度声共振混合机运行过程中的模态参数拟合模型:
H2=H1(ω)+…+Hm-1(ω)
其中,H(ω)为某一自由度声共振混合机运行过程中的模态参数拟合模型, X为位移信号;F为激振力;ω为固有频率;H1(ω)为第1个声共振混合机运行过程中的模态参数,Hm-1(ω)为第m-1个声共振混合机运行过程中的模态参数;
S42从m个模态参数中依次选出m-1个模态参数,将该m-1个模态参数输入N自由度声共振混合机运行过程中的模态参数拟合模型中,然后对N自由度声共振混合机运行过程中的模态参数拟合模型进行曲线拟合,然后求取曲线拟合后的N自由度声共振混合机运行过程中的模态参数拟合模型和频响函数模型的曲线的方差Δ。
所述方差Δ的计算模型为:
式中,H1i和H2i分别为曲线拟合后的N自由度声共振混合机运行过程中的模态参数拟合模型和频响函数模型的曲线在横坐标点i处对应纵坐标的取值,n为曲线横坐标点的个数,n为大于1的整数。
S5重复步骤S4,直至遍历m个模态参数,从而获取m个方差值,剔除方差值最小的模态参数拟合曲线中未选取的模态参数;
S6令m=m-1,若m>N,则重复步骤S4和S5,直至m=N,其中N为声共振混合机运行过程中的自由度数,获取声共振混合机运行过程中的N个真实模态参数;若m=N,则结束迭代计算,获取声共振混合机运行过程中的N个真实模态参数,然后根据所需频带从该N个真实模态参数中确定所需声共振混合机运行过程中的固有频率。
实施例1
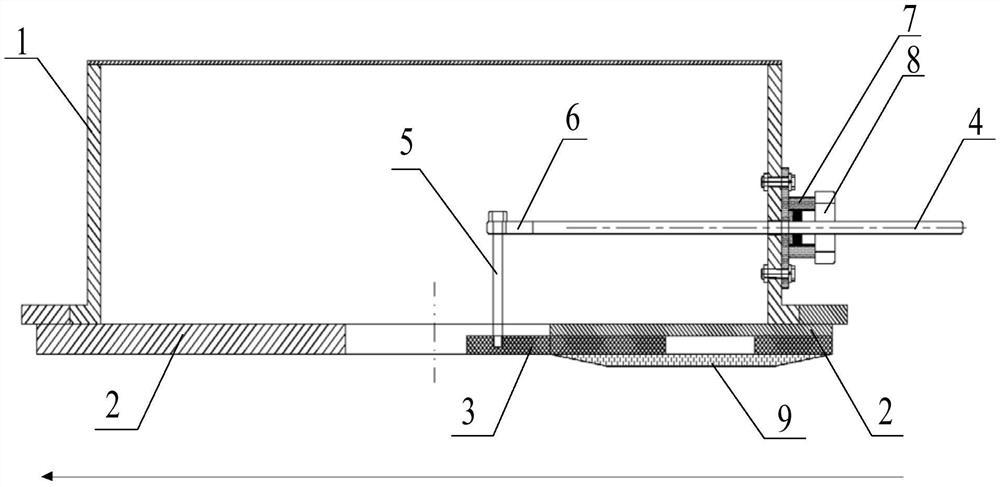
如图2和图4所示,本发明实施例中声共振混合机包括:负载端1、加速度传感器2、电机3、编码器4、工控机5,所述工控机5分别与加速度传感器2和编码器4相连,其中,负载端1是混合容器所处部分,需要采集此处的实时加速度;加速度传感器2,采集负载端的加速度,并将数据传送至工控机处;电机3,是整个声共振混合机的动力源,根据电机的转速和相位差来控制整个混合过程;编码器4,采集电机转动的脉冲数,并将数据传送至工控机5;工控机5,对加速度传感器2采集到的加速度信号和编码器4采集到的脉冲数进行分析处理,最终计算出声共振混合机的固有频率。
本发明实施例所提供的声共振混合机运行过程中固有频率的实时计算方法,能够根据当前采集的声共振混合机混合容器部分的实时加速度信号以及声共振混合机电机转动的脉冲数,实时计算出声共振混合机运行过程中的固有频率,进而控制声共振混合机根据所得固有频率控制设备运行,达到维持声共振混合机始终在共振点处稳定运行的目的。实施中,采集到原始数据及信号后,后续的分析处理均是在工控机中完成。实施中,加速度传感器采集到的加速度信号为模拟量,需要进行模数转换,转换成数字量,才能继续进行处理;编码器采集的脉冲数本身就是数字量,无需进行转换。
本发明实施例中声共振混合机原始数据分析处理的流程具体包括:
步骤6,对采集到的加速度信号滤波并积分,得出速度信号;
步骤7,对速度信号滤波并积分,得出位移信号;
步骤8,计算激振力;
步骤9,计算位移信号与激振力的频率响应函数(FRF);
步骤10,提取模态参数;
步骤11,剔除虚假模态,得到系统固有频率。
在步骤6中,加速度传感器的输出存在固定的零点漂移,即当加速度为0时传感器的输出不一定为0,直接对其积分会产生累积误差;并且加速度传感器采集到的原始加速度信号可能会存在高频噪声,所以需要对原始加速度信号进行滤波处理。为消除高频噪声的影响,可加入低通滤波器,所设截止频率要高于系统的固有频率。一般声共振混合机的工作频率为50-70Hz,而高频噪声的频率大于几千Hz。
一阶RC低通滤波算法如下:
Y(n)=a·X(n)+(1-a)·Y(n-1)
式中,X(n)为本次信号采样值;Y(n-1)为上次的滤波输出值;a为滤波系数,其值通常远小于1;Y(n)为本次滤波的输出值。
为消除零点漂移的影响,可加入高通滤波器,所设截止频率略大于0即可。
一阶RC高通滤波器算法如下:
Y(n)=a·(X(n)-X(n-1))+a·Y(n-1)
原始加速度信号滤波完成之后,即可对其进行积分,得到速度信号。
在步骤7中,需要对速度信号进行步骤6中同样的滤波处理,之后对其进行积分,得到位移信号。此位移信号作为步骤9计算频率响应函数中的响应信号。
在步骤8中,声共振混合机产生激振力的方式有多种,如电磁驱动方式和电机驱动方式等。本发明实施例采用的是电机驱动方式,利用四个伺服驱动电机带动四个偏心块来产生激振力。激振力的计算方法为:根据编码器采集到关于电机转动的脉冲数,计算出电机的相位差,此相位差即为偏心块的相位差,根据此相位差求出激振力。
计算激振力的方法具体为:如图5所示,其中a,b,c,d为与四个伺服驱动电机相连的偏心块,它们的转速均为ω,其中a和d的转向相反,b和c的转向相反。Fa,Fb,Fc,Fd分别为偏心块a,b,c,d产生的离心力,F合为四个离心力的合力,此合力即为声共振混合机产生的激振力。为计算出激振力,首先要确定偏心块的相位。其中,偏心块的相位计算公式为:
式中,θ为偏心块的实际相位;θ0为偏心块的初始相位,在设备工作前进行标定;nm为编码器对与该偏心块相连的电机所采集到的总脉冲数;n0为电机转动一圈编码器采集到的脉冲数。
设θ差为偏心块a和c的相位差,也为偏心块b和d的相位差;θ和为偏心块a和c的相位和,也为偏心块b和d的相位之和。θ差与θ和的计算方法为:(以偏心块a和c为例)
θ差=θa-θc
θ和=θa+θc
式中,θa为偏心块a的实际相位;θc为偏心块c的实际相位。
F合的计算公式为:
F=mω
式中,F为单个偏心块所产生的离心力;m为单个偏心块的质量;ω为偏心块的转速;r为偏心块的重心到旋转中心的距离;F合为激振力;t为电机的转动时间。
当然,此计算过程仅为采用本电机-偏心块驱动方式的激振力计算方法,其他不同驱动方式亦可采用不同的算法来计算激振力。此激振力作为步骤9计算频率响应函数中的输入信号。
在步骤9中,输入和输出信号的频率响应函数的计算方法具体为:因在此系统中,输出信号(即位移信号)是通过加速度传感器采集的原始信号计算所得,受噪声较大;而输入信号(即激振力信号)是通过编码器采集的原始信号计算所得,受噪声影响较小,故这里选用频响函数的H1估计。具体计算过程如下:
计算输入信号的自功率谱:
式中,GFF为输入信号的自功率谱;N为采样信号测点的个数;Fi为第i个测点的输入信号离散傅里叶变换; 为Fi的共轭。
计算输入输出的互功率谱:
式中,GXF输入输出的互功率谱;Xi为第i个测点的输出信号离散傅里叶变换。
则频响函数FRF的计算公式为:
在步骤10中,从频率响应函数中确定模态参数,需要用到模态参数提取算法。模态参数提取算法包含多种,如频域多项式拟合法(FDPI),整体正交多项式拟合法(FPDI),以及最小二乘复指数法(LSCE)等。本发明实施例选用频域多项式拟合法(FDPI)来识别系统的模态参数。FDPI是一种基于低阶频响函数模型的识别方法,该方法适合于估计大衰减模态,特别适合于在窄频带中找出大衰减模态。应用FDPI方法识别系统模态参数有以下步骤:
①估计结构矩阵;
②根据系统模型计算结构的极值点和模态参数;
③利用缩减数据技术构造系统的完整模型。
以下为该方法的具体实现过程:
通常可以将一个结构的动态特性以N阶矩阵微分方程的形式表示出来:
式中,f(t)为N维力向量; x分别为N维加速度、速度和位移向量;M、C、K分别为系统结构的质量矩阵、阻尼矩阵和刚度矩阵。
将(1)式按下列式子进行推导:
y(t)=Qx(t)(3)
上式中 h(t)表示N×Ni脉冲响应矩阵,N为系统自由度,Ni为输入脉冲的个数;u(t)为输入变量矩阵(由狄拉克脉冲矩阵构成);y(t)为定义的输出矩阵;A为状态转移矩阵;B为输入矩阵;Q为输出矩阵。
于是可得传递函数矩阵的一般方程式:
H(s)=C[sI-A]
再根据位移与力的传递函数的关系:
[s
加速度与力的传递函数的关系为:
[s
在式(5)和(6)中,对于所有的s均成立,所以测量数据足够多的话,上述两个方程中的任何一个都可以构成关于矩阵M
状态转移矩阵A的实质为:
再通过计算矩阵A的特征值和特征向量就可以求得被测系统的极值点和模态向量。
在步骤10中,由于声共振混合机的模态参数一般具有多阶,且为识别出系统的所有真实模态,一般会对其进行扩阶处理,这时就引入了虚假模态,而本发明所需要的是对系统共振混合贡献最大的那一阶模态参数,故需要对提取的模态参数进行剔除。
在步骤11中,需要对步骤10中提取的模态参数进行剔除,得到所需要的模态参数,即得到系统的固有频率。
图5示出了步骤11具体实现流程,具体如下:
步骤12,识别出包括虚假模态在内的所有模态m个;
步骤13,从m个已识别的模态参数中剔除一个,此时m=m-1;
步骤14,判断是否满足m=N(m>N,N为系统的自由度数,也为系统的真实模态的阶数),若不满足则返回步骤13,若满足则跳到步骤15;
步骤15,得到所需固有频率。
步骤13为剔除虚假模态的关键步骤,共需迭代m-N次。此步骤中利用识别出的不同模态参数进行频响函数仿真计算,得到仿真曲线,然后与原始数据拟合出的频响函数(H1)曲线进行比较,含有较多真实模态的仿真结果比含有较多虚假模态的仿真结果更加接近于原始数据的频响函数拟合曲线。即真实模态比虚假模态对仿真曲线的拟合结果贡献更大。具体的迭代策略为:每次迭代剔除一个虚假模态,即对曲线拟合贡献最小的那一阶模态。
步骤13具体实施为:从m个识别的模态参数中依次选出m-1个,即依次剔除一个模态参数,进行仿真计算频响函数,然后与实测曲线(输入信号与响应信号的频响函数曲线)相减,计算其方差,共进行m次。比较各方差,提取出方差最小的那一组,即剔除对拟合曲线贡献最小的那个模态。此时m个已识别模态参数中剩m-1个。
步骤13可具体为:从m个识别的模态参数中依次选出m-1个,利用这m-1个模态参数,仿真计算频响函数。单自由度系统(即只具有一阶模态参数)频响函数的表达式有多种,这里选用以下这种表达形式:
式中,X为响应信号(即位移信号);F为输入信号(即激振力信号);ω为固有频率。
而N自由度系统(具有N阶模态参数)的频响函数,为各阶模态下频响函数的线性叠加。
H2=H1(ω)+…+Hm-1(ω) (8)
可得到m-1个H(ω)的线性叠加H2,即为此m-1个模态参数下的频响函数,然后对此函数进行曲线拟合。将m-1个模态参数下的频响函数拟合曲线与原始数据的频响函数拟合曲线分别离散化。
用Δ表示m-1个模态参数下的频响函数与原始数据的频响函数的偏离程度。
式中,H1i和H2i分别表示为H1和H2离散化后的第i个函数值。
从m个识别的模态参数中依次选出m-1个,共有m个不同的组合。将上述过程进行m次,即可得到Δ1,Δ2,…,Δm,比较这m个Δ,选出其中的最小值,此Δ对应的m-1模态参数,即为与真实模态最接近的模态参数组合。
在步骤15中,已得到N(N为声共振混合机的自由度数)个系统的真实模态参数,根据所需频段选取一阶模态参数,即可得到所需的模态参数,所得模态参数包括固有频率和阻尼比,其中的固有频率即为所需固有频率。
本申请实施例所提供的声共振混合机运行过程中固有频率的实时计算方法,能够根据当前采集信号,实时计算出系统的固有频率,进而控制系统根据所得固有频率控制设备运行,达到维持设备始终在共振点处稳定运行的目的。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
一种实时获取声共振混合机运行过程中固有频率的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0