






专利摘要
本实用新型提供了一种膜蛋白自动化脂立方相结晶系统,包括计算机和结晶机器人,结晶机器人包括可移动承载平台,该系统还包括微量泵、三维电动位移支撑平台、注射器以及辅助定位金属板,结晶机器人、微量泵、三维电动位移支撑平台均与计算机电连接,可移动承载平台上放置有多位晶体板;辅助定位金属板包括板主体、第一横杆以及第二横杆,结晶机器人由板主体与第一横杆卡合,三维电动位移支撑平台由板主体与第二横杆卡合;注射器与微量泵均固接于三维电动位移支撑平台上,微量泵与注射器连接,注射器在可移动承载平台移动到预设位置时由三维电动位移装置移动到多位晶体板上的待加样孔位的正上方。可实现自动化配液点样实现脂立方相结晶功能。
权利要求
1.一种膜蛋白自动化脂立方相结晶系统,包括计算机和结晶机器人,所述结晶机器人包括可移动承载平台,所述可移动承载平台上放置有多位晶体板,其特征在于,所述膜蛋白自动化脂立方相结晶系统还包括微量泵、三维电动位移支撑平台、注射器以及辅助定位金属板,所述结晶机器人、所述微量泵、所述三维电动位移支撑平台均与所述计算机电连接;
所述辅助定位金属板包括板主体、第一横杆以及第二横杆,所述结晶机器人由所述板主体与所述第一横杆卡合,所述三维电动位移支撑平台由所述板主体与所述第二横杆卡合;
所述注射器与所述微量泵均固接于所述三维电动位移支撑平台上,所述微量泵与所述注射器连接,所述注射器在所述可移动承载平台移动到预设位置时位于所述多位晶体板上的待加样孔位的正上方。
2.如权利要求1所述的膜蛋白自动化脂立方相结晶系统,其特征在于,所述微量泵为纳升级微量泵。
3.如权利要求1所述的膜蛋白自动化脂立方相结晶系统,其特征在于,所述结晶机器人、所述微量泵、所述三维电动位移支撑平台均通过RS232串口与所述计算机电连接。
4.如权利要求1所述的膜蛋白自动化脂立方相结晶系统,其特征在于,所述结晶机器人与所述三维电动位移支撑平台的底面均为四边形底面,所述板主体与所述第一横杆构成角度为直角的第一弯折区,所述板主体与所述第二横杆构成角度为直角的第二弯折区,所述可移动承载平台卡合于所述第一弯折区,所述三维电动位移支撑平台卡合于所述第二弯折区。
5.如权利要求1所述的膜蛋白自动化脂立方相结晶系统,其特征在于,所述三维电动位移支撑平台上设有注射器转接板,所述注射器转接板包括与所述三维电动位移支撑平台螺接固定的固定主板、垂直设置于所述固定主板上的侧板以及设置于所述固定主板上的与所述侧板连接的支撑块,所述侧板的一端部与所述注射器螺接固定。
6.如权利要求1至5任意一项所述的膜蛋白自动化脂立方相结晶系统,其特征在于,所述辅助定位金属板为钢板。
说明书
技术领域
本实用新型涉及一种膜蛋白自动化脂立方相结晶系统。
背景技术
不同的蛋白质具有不同的三维结构,而不同的蛋白质结构则决定了蛋白质特定的功能。因此蛋白质三维结构的研究是蛋白质科学的核心内容之一。获得高度有序的蛋白质晶体是研究蛋白质结构的前提条件。但是如何获得高质量、适合衍射的蛋白质晶体是近年来限制解析蛋白质结构的瓶颈,而且这种限制日益突出,结构基因组的研究结果表明,从克隆到最后蛋白质结构解析只有不到10%的成功率。
膜蛋白是生物膜功能的主要体现者,它在各种重要生物学基本过程中起着非常关键的作用,在目前的药物开发中有约70%的药物靶点为膜蛋白,因此有必要了解它们的结构与功能。脂立方相结晶方法为具有疏水特征的膜蛋白的结晶提供一个新的途径。
现有的结晶机器人不具备脂立方相结晶功能,若需要完成脂立方相结晶功能,则采用人工进行后续配液工作,实验时间长,灵活性差,实验过程不准确。
实用新型内容
本实用新型要解决的技术问题是为了克服现有技术中无法自动化实现脂立方相结晶功能的缺陷,提供一种膜蛋白自动化脂立方相结晶系统。
本实用新型是通过下述技术方案来解决上述技术问题的:
一种膜蛋白自动化脂立方相结晶系统,包括计算机和结晶机器人,所述结晶机器人包括可移动承载平台,所述可移动承载平台上放置有多位晶体板,其特点在于,所述膜蛋白自动化脂立方相结晶系统还包括微量泵、三维电动位移支撑平台、注射器以及辅助定位金属板,所述结晶机器人、所述微量泵、所述三维电动位移支撑平台均与所述计算机电连接;
所述辅助定位金属板包括板主体、第一横杆以及第二横杆,所述结晶机器人由所述板主体与所述第一横杆卡合,所述三维电动位移支撑平台由所述板主体与所述第二横杆卡合;
所述注射器与所述微量泵均固接于所述三维电动位移支撑平台上,所述微量泵与所述注射器连接,所述注射器在所述可移动承载平台移动到预设位置时位于所述多位晶体板上的待加样孔位的正上方。
在本方案中,通过计算机控制,以及通过辅助定位金属板确定结晶机器人与微量泵的位置,使结晶机器人在配液工作完成后通过可移动承载平台将多位晶体板自动移送至注射器与多位晶体板上的孔位对应的位置,三维电动位移支撑平台按照预定设置自动完成对多位晶体板的孔位上的加样,实现了膜蛋白脂立方体结晶的自动化,缩短了实验时间,保证了实验过程的准确性。
较佳地,所述微量泵为纳升级微量泵。
在本方案中,通过纳升级微量泵可以有效保证加样的液滴的精度,进一步保证脂立方相结晶的质量。
较佳地,所述结晶机器人、所述微量泵、所述三维电动位移支撑平台均通过RS232串口与所述计算机电连接。
在本方案中,通过RS232串口与计算机电连接,实现了膜蛋白自动化脂立方相结晶系统的自动化,提高了脂立方相结晶效率。
较佳地,所述结晶机器人与所述三维电动位移支撑平台的底面均为四边形底面,所述板主体与所述第一横杆构成角度为直角的第一弯折区,所述板主体与所述第二横杆构成角度为直角的第二弯折区,所述可移动承载平台卡合于所述第一弯折区,所述三维电动位移支撑平台卡合于所述第二弯折区。
在本方案中,通过将结晶机器人与三维电动位移支撑平台分别卡合于具有直角的第一弯折区与第二弯折区,使结晶机器人的可移动承载平台将多位晶体板移送至注射器注射位置,无需手动调整位置,通过可移动承载平台的水平自动移动,使多位晶体办在结晶机器人和微量泵之间进行自动配液和加样,方便快速。
较佳地,所述三维电动位移支撑平台上设有注射器转接板,所述注射器转接板包括与所述三维电动位移支撑平台螺接固定的固定主板、垂直设置于所述固定主板上的侧板以及设置于所述固定主板上的与所述侧板连接的支撑块,所述侧板的一端部与所述注射器螺接固定。
在本方案中,通过与所述注射器转接板固定所述注射器可以有效通过所述三维电动位移支撑平台的三维移动完成定点自动注射。
较佳地,所述辅助定位金属板为钢板。
本实用新型的积极进步效果在于:本实用新型可以在短时间内连续自动进行脂立方相结晶实验,节省时间,实验过程更加准确。
附图说明
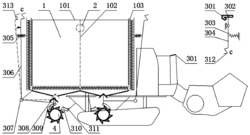
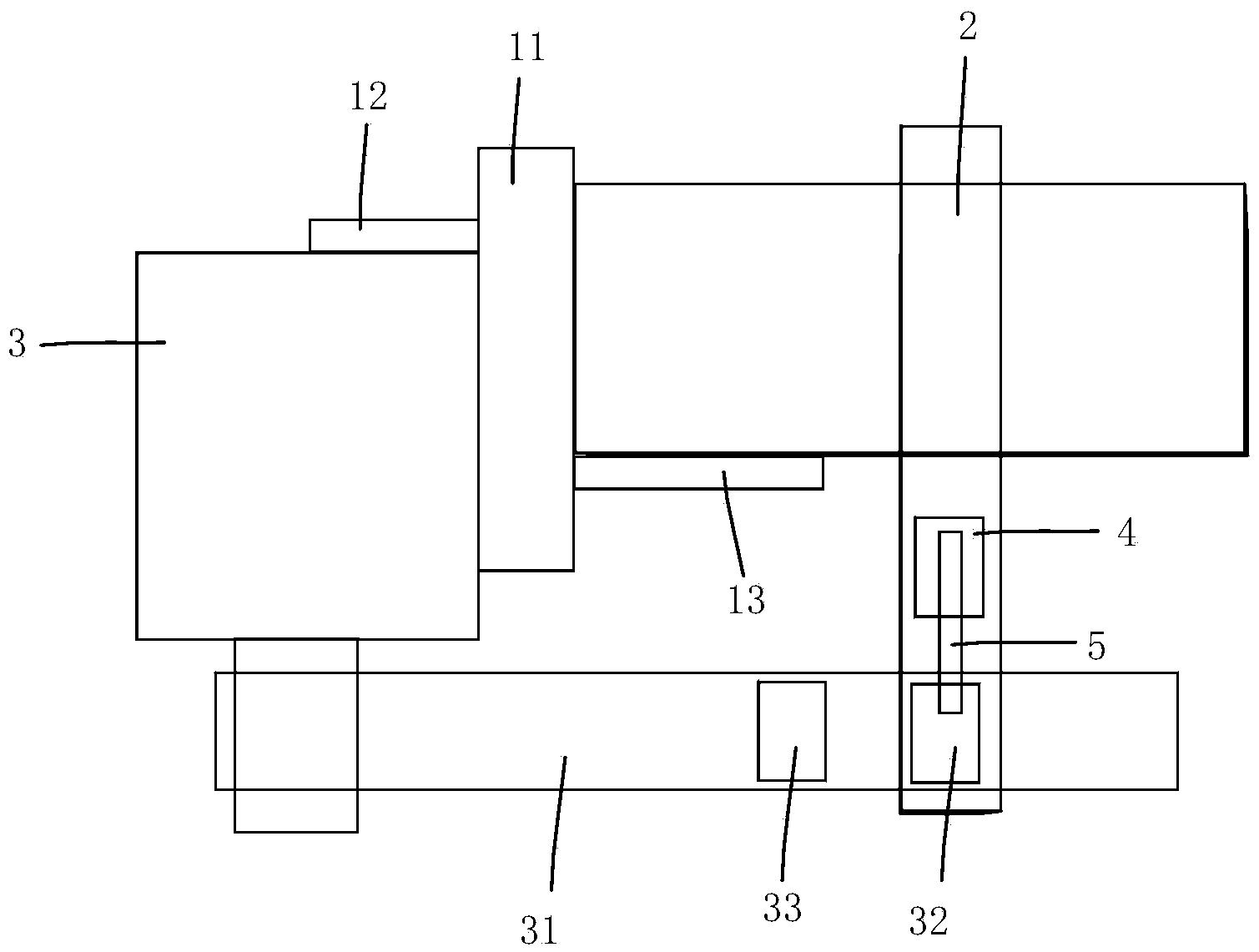
图1为本实用新型一实施例的多位晶体板位于结晶机器人工作位置的膜蛋白自动化脂立方相结晶系统的部分结构示意图。
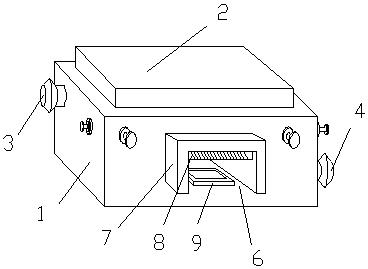
图2为本实用新型一实施例的多位晶体板位于注射器工作位置的膜蛋白自动化脂立方相结晶系统的部分结构示意图。
图3为本实用新型一实施例的膜蛋白自动化脂立方相结晶系统的电连接结构示意图。
图4为本实用新型一实施例的辅助定位金属板的结构示意图。
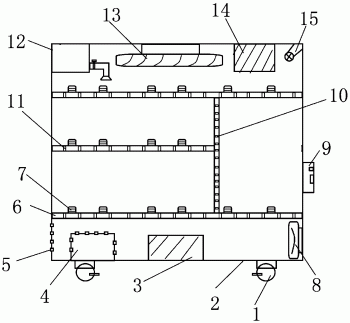
图5为本实用新型一实施例的多位晶体板的结构示意图。
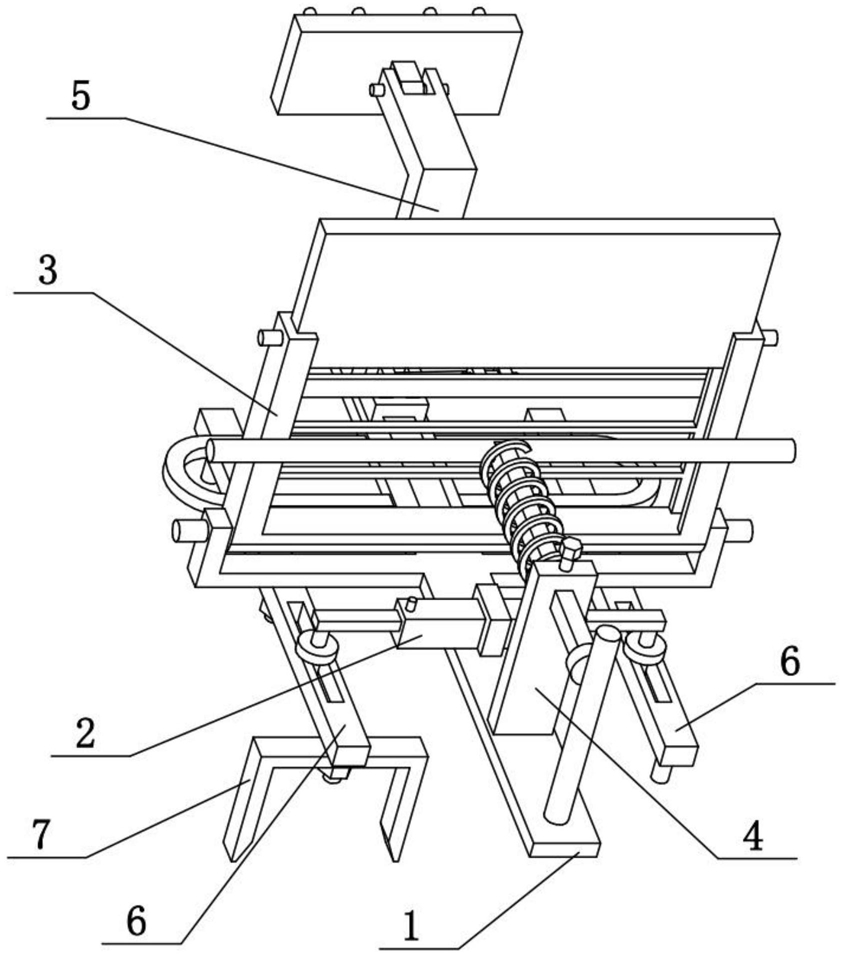
图6为本实用新型一实施例的注射器转接板的结构示意图。
具体实施方式
下面举个较佳实施例,并结合附图来更清楚完整地说明本实用新型。
如图1至图4所示,一种膜蛋白自动化脂立方相结晶系统,包括辅助定位金属板1、三维电动位移支撑平台2、结晶机器人3、微量泵4、注射器5及计算机6。结晶机器人3、微量泵4、三维电动位移支撑平台2均通过RS232(异步串行通信接口)串口与计算机6电连接,该串口并不限以上所述,这里不再一一赘述。
结晶机器人3包括可移动承载平台31,可移动承载平台31上放置有多位晶体板32,该多位晶体板32为包含有96个孔位321的晶体板,如图5所示。
辅助定位金属板1包括板主体11、第一横杆12以及第二横杆13。结晶机器人3与三维电动位移支撑平台2的底面均为四边形底面,板主体11与第一横杆12构成角度为直角的第一弯折区,该第一弯折区为图4中板主体11与第一横杆12构成的左下角区域,结晶机器人11卡合于该第一弯折区并与板主体11和第一横杆12贴合;板主体11与第二横杆13构成角度为直角的第二弯折区,该第二弯折区为图4中板主体11与第二横杆13构成的右上角区域,三维电动位移支撑平台2卡合于该第二弯折区并与板主体11和第二横杆13贴合。该辅助定位金属板1为一体成型的钢板。
注射器5与微量泵4固接于三维电动位移支撑平台2上,微量泵4与注射器5通过导管连接。
当结晶机器人3、三维电动位移支撑平台2以及辅助定位金属板1卡合完成后,结晶机器人3上的可移动承载平台31水平移动,使处于结晶机器人3的工作位置的多位晶体板32移动到预设的三维电动位移支撑平台2的工作位置,该工作位置为固接于三维电动位移支撑平台2上的注射器5的正下方,如图2所示,该注射器5则位于多位晶体板32上的待加样孔位的正上方,此时,计算机6控制微量泵4进行液滴注射覆盖,实现了脂立方相结晶的自动化,提高了结晶效率。
通过该辅助定位金属板1间接固定三维电动位移支撑平台2,机械记录相对位置,有助于设定默认初始加样位置,省去了实验调试的环节,进一步提高了实现效率。
此外,如图6所示,该三维电动位移支撑平台2设有注射器转接板7,注射器5通过该注射器转接板7固定于三维电动位移支撑平台2上。该三维电动位移支撑平台2为微米量级的三维电动位移支撑平台。
该注射器转接板7包括固定主板71、侧板72以及支撑块73,固定主板71上设有若干螺纹孔,固定主板71与三维电动位移支撑平台2螺接固定,侧板72垂直固定连接于固定主板71,支撑块73固定主板71和侧板72焊接固定,侧板72的一端设有螺纹孔,注射器5与侧板72螺接固定,使三维电动位移支撑平台2快速准确带动注射器5定点自动注射,通过微量泵4的微量定量加样,实现膜蛋白快速准确的自动加样。其中,该微量泵4为纳升级微量泵。
虽然以上描述了本实用新型的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本实用新型的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本实用新型的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本实用新型的保护范围。
膜蛋白自动化脂立方相结晶系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


![一种[CuCN]晶体材料及其制备方法](https://www.zhichawang.com/images/10/CN111848973A/CN111848973A.jpg)














动态评分
0.0