

IPC分类号 : B65B35/56,B65B35/06,B65B35/44,B65B35/34,B65B35/40,B65B35/36,B65B57/00,B65B55/12,B65B17/00







专利摘要
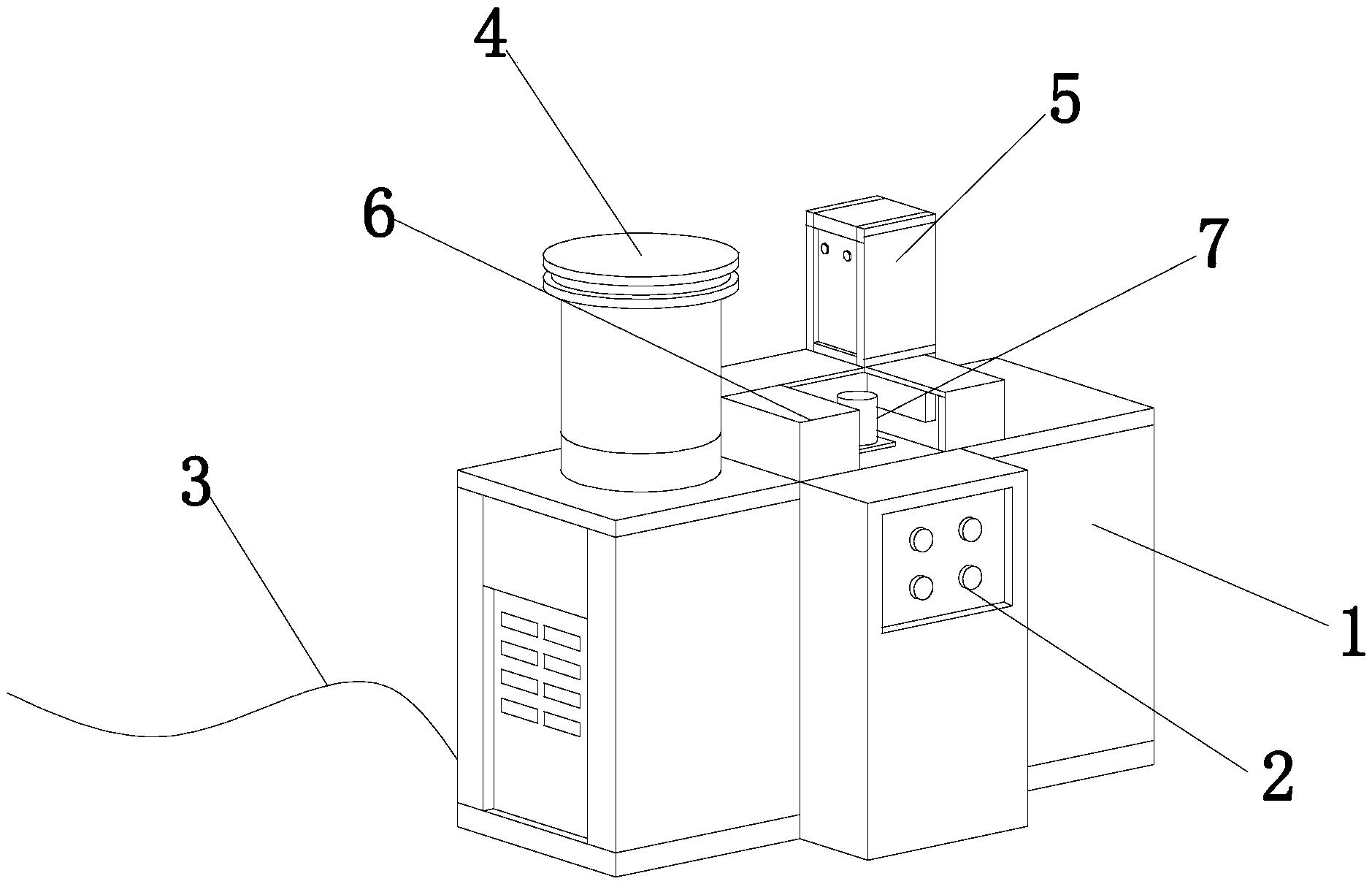
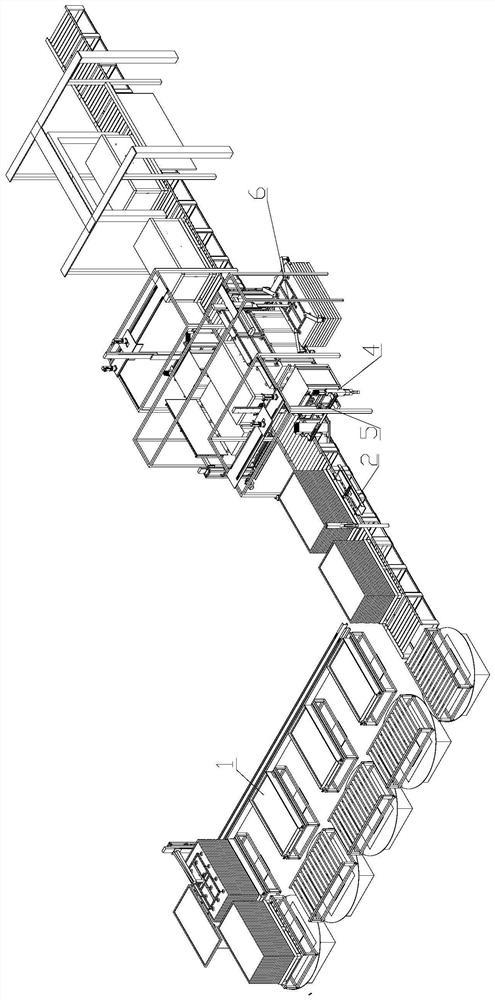
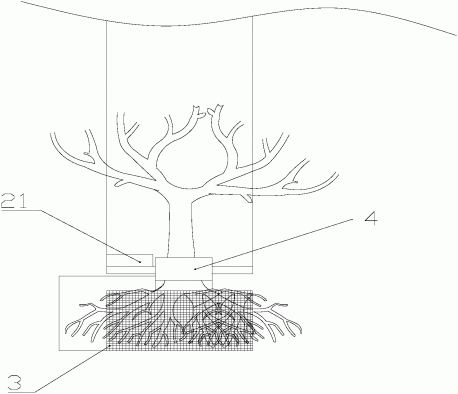
本实用新型公开了一种针管自动有序分料机器人,包括翻转整料部分、振动落料部分、夹持整料部分、分料推送部分和集中电控部分;翻转整料部分包括翻转板、导向板、翻转轴和翻转驱动装置;振动落料部分位于翻转整料部分的正前方,包括组架、挡料板、导向弯板、动导向挡片、静导向挡片和振动驱动装置;夹持整料部分包括夹持机械臂和夹持机械手;分料推送部分设置在静导向挡片的正下方,包括伸缩推送装置、滑块和分料推送立板。本实用新型针对自动化生产线产出的、通过输送带输送来的捆状形态的批量静脉采血针,能够实现自动有序逐根分料,以便于后续对每根静脉采血针进行独立消毒包装,特别适用于静脉采血针的加工包装生产线。
权利要求
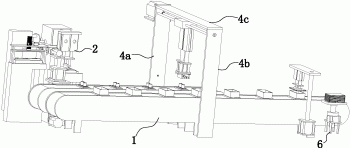
1.一种针管自动有序分料机器人,其特征在于,包括支撑底架(1)、翻转整料部分(2)、振动落料部分(4)、夹持整料部分(5)、分料推送部分(3)和集中电控部分;
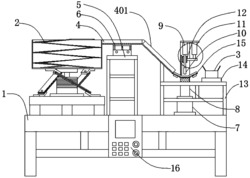
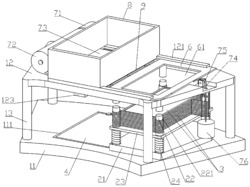
所述的翻转整料部分(2)包括翻转板(2-5)、导向板(2-6)、翻转轴(2-4)和翻转驱动装置;轴线左右方向水平设置的翻转轴(2-4)滚动配合安装在支撑底架(1)上、且翻转轴(2-4)轴向定位设置;平板结构的翻转板(2-5)的底平面前端与翻转轴(2-4)固定连接;包括向上开口设置的V型槽的导向板(2-6)固定设置在翻转板(2-5)的顶平面上、且V型槽的开口左右方向对称设置;翻转驱动装置与翻转轴(2-4)传动连接;
所述的振动落料部分(4)位于翻转整料部分(2)的正前方,包括组架(4-3)、挡料板(4-7)、导向弯板(4-5)、动导向挡片(4-6)、静导向挡片(4-8)和振动驱动装置(4-9);组架(4-3)通过竖直方向设置的导向柱滑移配合安装在支撑底架(1)上;立板结构的挡料板(4-7)固定设置在组架(4-3)的后端面上、且立板板面正对前后方向设置;左右间隔对称、沿前后方向整体呈Y形结构的两件导向弯板(4-5)的前端固定设置在组架(4-3)的后端面上,且导向弯板(4-5)的对称中心正对导向板(2-6)的V型槽设置,两件导向弯板(4-5)之间形成静脉采血针(6)的容纳空间;左右对称设置的动导向挡片(4-6)分别固定设置在左右对称设置的导向弯板(4-5)的前端,沿前后方向整体呈Y形结构的两件动导向挡片(4-6)下部之间的间隙尺寸与单根静脉采血针(6)的输血软管的外径尺寸间隙配合、形成单根静脉采血针(6)的下滑通道Ⅰ;左右对称设置的静导向挡片(4-8)在竖直方向上对应动导向挡片(4-6)的位置固定设置在支撑底架(1)上、且静导向挡片(4-8)与动导向挡片(4-6)在前后方向上错位设置,沿前后方向整体呈Y形结构的两件静导向挡片(4-8)下部之间的间隙尺寸与单根静脉采血针(6)的输血软管的外径尺寸间隙配合、形成单根静脉采血针(6)的下滑通道Ⅱ;振动驱动装置(4-9)与组架(4-3)的导向柱传动连接;
所述的夹持整料部分(5)包括夹持机械臂(5-2)和夹持机械手(5-3);夹持机械臂(5-2)通过夹持机械臂驱动装置(5-1)安装在支撑底架(1)上;夹持机械手(5-3)安装在夹持机械臂(5-2)的末节,夹持机械手(5-3)包括沿左右方向开合设置的夹持机构,正常夹持工作状态时,夹持机械手(5-3)位于翻转板(2-5)与振动落料部分(4)之间、且位于翻转板(2-5)前上方的夹持机械手(5-3)的夹持机构正对导向板(2-6)的V型槽设置;
所述的分料推送部分(3)设置在静导向挡片(4-8)的正下方,包括伸缩推送装置(3-1)、滑块(3-3)和分料推送立板(3-2);左右方向伸缩设置的伸缩推送装置(3-1)的机体端固定安装在支撑底架(1)上;滑块(3-3)固定安装在伸缩推送装置(3-1)的伸缩端上、且滑块(3-3)通过沿左右方向设置的滑移导向机构滑移配合安装在支撑底架(1)上;沿左右方向走向设置的分料推送立板(3-2)固定安装在滑块(3-3)上,且分料推送立板(3-2)的顶面与静导向挡片(4-8)的底面对接、并间隙配合,分料推送立板(3-2)的顶面上设有宽度尺寸与深度尺寸均与单根静脉采血针(6)的输血软管的外径尺寸间隙配合的U形凹槽;当伸缩推送装置(3-1)的伸缩端处于左极限位置或右极限位置时,分料推送立板(3-2)的U形凹槽位于两件静导向挡片(4-8)形成的下滑通道Ⅱ的正下方位置,当伸缩推送装置(3-1)的伸缩端处于右极限位置或左极限位置时,分料推送立板(3-2)的U形凹槽处于远离静导向挡片(4-8)的暴露状态;
所述的集中电控部分包括控制器、夹持机械臂控制回路、振动落料控制回路、翻转整料控制回路和分料推送控制回路,控制器分别与振动驱动装置(4-9)、伸缩推送装置(3-1)、翻转整料部分(2)的翻转驱动装置、夹持机械臂驱动装置(5-1)和夹持机械手(5-3)的夹持机构电连接。
2.根据权利要求1所述的针管自动有序分料机器人,其特征在于,振动落料部分(4)还包括风力助滑装置,风力助滑装置包括导气管(4-1)和喷气嘴(4-2),导气管(4-1)固定安装在组架(4-3)上,左右对称定位设置的喷气嘴(4-2)的喷射方向对应下滑通道Ⅰ的顶端设置,导气管(4-1)的一端与喷气嘴(4-2)连通连接、另一端连接正压风源。
3.根据权利要求1所述的针管自动有序分料机器人,其特征在于,夹持机械手(5-3)上还设有包括模式识别传感器的模式识别装置(5-4),集中电控部分还包括模式识别控制回路,控制器与模式识别装置(5-4)电连接。
4.根据权利要求1或2或3所述的针管自动有序分料机器人,其特征在于,静导向挡片(4-8)底平面距离地面的高度尺寸不低于导向板(2-6)的V型槽槽底距离地面的高度尺寸;夹持机械手(5-3)的夹持机构的底端距离地面的高度尺寸不低于静导向挡片(4-8)的底端距离地面的高度尺寸。
5.根据权利要求1或2或3所述的针管自动有序分料机器人,其特征在于,夹持机械臂驱动装置(5-1)至少包括沿左右方向坐标移动的X坐标驱动机构和沿竖直上下方向坐标移动的Z坐标驱动机构,或者夹持机械臂驱动装置(5-1)至少包括沿前后方向坐标移动的Y坐标驱动机构和沿竖直上下方向坐标移动的Z坐标驱动机构。
6.根据权利要求1或2或3所述的针管自动有序分料机器人,其特征在于,翻转驱动装置是包括滑台气缸(2-7)、连接块(2-1)、曲柄(2-2)和摆杆(2-3)的曲柄滑块结构,伸缩方向沿前后方向设置的滑台气缸(2-7)的机体固定安装在支撑底架(1)上、伸缩端与连接块(2-1)固定连接,长度方向沿前后方向设置的曲柄(2-2)的一端铰接安装在连接块(2-1)上、另一端铰接安装在摆杆(2-3)的顶端,长度方向沿翻转轴(2-4)的径向方向设置的摆杆(2-3)的底端与翻转轴(2-4)固定连接。
7.根据权利要求1或2或3所述的针管自动有序分料机器人,其特征在于,振动驱动装置(4-9)和伸缩推送装置(3-1)均是气缸结构,气缸结构的振动驱动装置(4-9)和伸缩推送装置(3-1)分别通过电磁气路控制阀与控制器连接。
针管自动有序分料机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0