

IPC分类号 : B64D9/00,B64D27/24,B64C27/00,H01M50/249,H01M50/258,H01M50/502





专利摘要
本实用新型公开了一种无人机,包括机体、设置在机体上的螺旋桨支撑架、转动安装在所述螺旋桨支撑架上的螺旋桨和设置在所述机体上的储物仓;所述储物仓被设置为在所述机体断电后与所述机体分离。相比于现有技术本实用新型通过将储物仓设置为在出现故障断电的情况下自动脱落的设计使在出现故障通过断电能够自动卸载储物仓从而减轻无人机的重量避免由于储物仓的存在加重无人机的损坏程度,能够有效的降低无人机的损伤程度。
权利要求
1.一种无人机,其特征在于,包括机体、设置在机体上的螺旋桨支撑架、转动安装在所述螺旋桨支撑架上的螺旋桨和设置在所述机体上的储物仓;
所述储物仓被设置为在所述机体断电后与所述机体分离。
2.根据权利要求1所述的无人机,其特征在于,所述机体上设置有第一电磁铁和分别与所述第一电磁铁相互作用的卡爪夹持件,所述卡爪夹持件包括第一卡爪和第二卡爪;
所述第一卡爪的第一端和所述第二卡爪的第一端分别与所述机体转动连接,所述第一卡爪的第二端和所述第二卡爪的第二端在所述第一电磁铁的吸附作用下相互靠近以夹持固定所述储物仓;
并在所述第一电磁铁的吸附作用撤销后相互远离以释放所述储物仓。
3.根据权利要求2所述的无人机,其特征在于,所述储物仓上设置有与所述卡爪夹持件相适配的抓举部,所述抓举部为设置在所述储物仓上的燕尾榫状轨道。
4.根据权利要求3所述的无人机,其特征在于,所述第一卡爪具有与所述机体转动连接的连接部和与所述抓举部相适配的钩状部;
所述钩状部固定在所述连接部上远离所述机体的一端并在自身重力作用下向远离所述第二卡爪的方向转动;
所述钩状部被设置为在所述第一电磁铁的作用下向靠近所述第二卡爪的方向转动。
5.根据权利要求1所述的无人机,其特征在于,所述机体上还设置有红外线检测摄像头。
6.根据权利要求1所述的无人机,其特征在于,所述无人机还包括可拆卸的安装固定在所述机体上的电池模块,所述电池模块具有电池组件、包覆所述电池组件的电池保护壳和用于电连接所述电池组件和所述机体的导通件。
7.根据权利要求6所述的无人机,其特征在于,所述机体上设置有用于吸附所述电池模块的第二电磁铁和与所述导通件相适配的插接位,当所述导通件插接到插接位时所述第二电磁铁导通并对所述电池模块吸附;
所述电池保护壳上设置有与所述电磁铁相适配的磁铁。
8.根据权利要求7所述的无人机,其特征在于,所述导通件包括导通片、与所述导通片固定连接以用于推动所述导通片向所述插接位的方向移动的推动部、驱使所述导通片向远离所述插接位的方向移动的复位件和设置在所述推动部上用于与所述第二电磁铁配合的导通磁铁,所述导通磁铁被所述第二电磁铁吸附时以锁定所述导通件的位置。
9.根据权利要求8所述的无人机,其特征在于,所述复位件为压缩弹簧,且所述复位件的第一端抵接在所述电池保护壳的内侧壁上,所述复位件的第二端抵接在所述推动部上。
10.根据权利要求1所述的无人机,其特征在于,所述螺旋桨支撑架上设置有用于防护所述螺旋桨的弧形防护板,所述弧形防护板外侧壁上设置有橡胶保护层。
说明书
技术领域
本实用新型涉及无人机技术领域,特别是涉及一种用于植保的无人机。
背景技术
随着植保无人机的推广,越来越多的人开始接受这种新型的喷洒农药方式。
目前的植保无人机主要偏向于大载量,高效率,从而忽视了安全和质量方面的问题。无人机一旦出现事故,轻则需要回厂检测维修,重则直接报废。并且,无人机一旦损坏,回厂维修十分麻烦,而且时间较长,容易耽误农时。
实用新型内容
针对现有技术中存在的技术问题,本实用新型的目的是:提供一种无人机,在出现故障通过断电能够自动卸载储物仓从而减轻无人机的重量避免由于储物仓的存在加重无人机的损坏程度。
本实用新型的目的通过下述技术方案实现:包括机体、设置在机体上的螺旋桨支撑架、转动安装在所述螺旋桨支撑架上的螺旋桨和设置在所述机体上的储物仓;
所述储物仓被设置为在所述机体断电后与所述机体分离。
进一步地,所述机体上设置有第一电磁铁和分别与所述第一电磁铁相互作用的卡爪夹持件,所述卡爪夹持件包括第一卡爪和第二卡爪;
所述第一卡爪的第一端和所述第二卡爪的第一端分别与所述机体转动连接,所述第一卡爪的第二端和所述第二卡爪的第二端在所述第一电磁铁的吸附作用下相互靠近以夹持固定所述储物仓;
并在所述第一电磁铁的吸附作用撤销后相互远离以释放所述储物仓。
进一步地,所述储物仓上设置有与所述卡爪夹持件相适配的抓举部,所述抓举部为设置在所述储物仓上的燕尾榫状轨道。
进一步地,所述第一卡爪具有与所述机体转动连接的连接部和与所述抓举部相适配的钩状部;
所述钩状部固定在所述连接部上远离所述机体的一端并在自身重力作用下向远离所述第二卡爪的方向转动;
所述钩状部被设置为在所述第一电磁铁的作用下向靠近所述第二卡爪的方向转动。
进一步地,所述机体上还设置有红外线检测摄像头。
进一步地,所述无人机还包括可拆卸的安装固定在所述机体上的电池模块,所述电池模块具有电池组件、包覆所述电池组件的电池保护壳和用于电连接所述电池组件和所述机体的导通件。
进一步地,所述机体上设置有用于吸附所述电池模块的第二电磁铁和与所述导通件相适配的插接位,当所述导通件插接到插接位时所述第二电磁铁导通并对所述电池模块吸附;
所述电池保护壳上设置有与所述电磁铁相适配的磁铁。
进一步地,所述导通件包括导通片、与所述导通片固定连接以用于推动所述导通片向所述插接位的方向移动的推动部、驱使所述导通片向远离所述插接位的方向移动的复位件和设置在所述推动部上用于与所述第二电磁铁配合的导通磁铁,所述导通磁铁被所述第二电磁铁吸附时以锁定所述导通件的位置。
进一步地,所述复位件为压缩弹簧,且所述复位件的第一端抵接在所述电池保护壳的内侧壁上,所述复位件的第二端抵接在所述推动部上。
进一步地,所述螺旋桨支撑架上设置有用于防护所述螺旋桨的弧形防护板,所述弧形防护板外侧壁上设置有橡胶保护层。
本实用新型相对于现有技术具有如下的优点及效果:通过将储物仓设置为在出现故障断电的情况下自动脱落的设计使在出现故障通过断电能够自动卸载储物仓从而减轻无人机的重量避免由于储物仓的存在加重无人机的损坏程度,能够有效的降低无人机的损伤程度。
附图说明
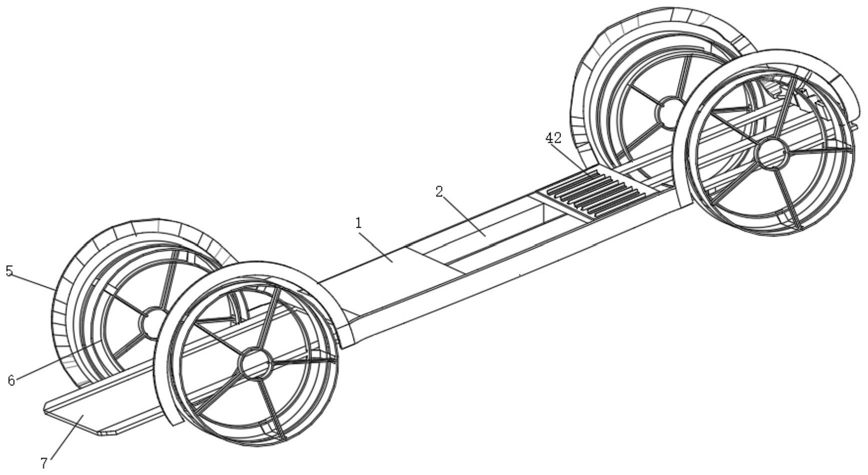
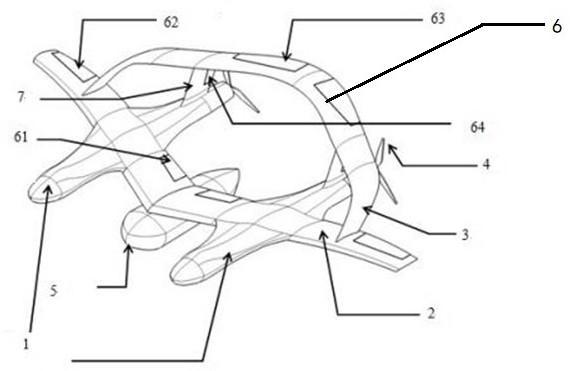
图1是本实用新型实施例无人机的结构示意图;
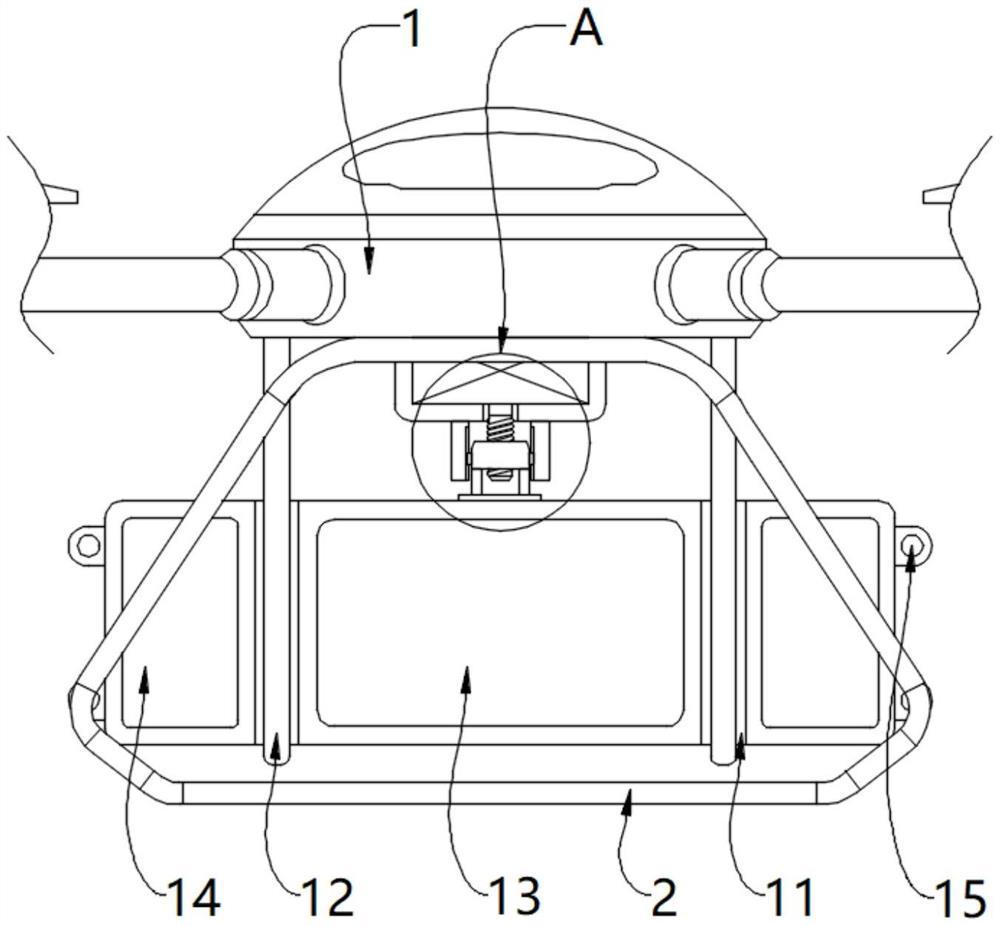
图2是本实用新型实施例无人机的储物仓与机体分离后的结构示意图;
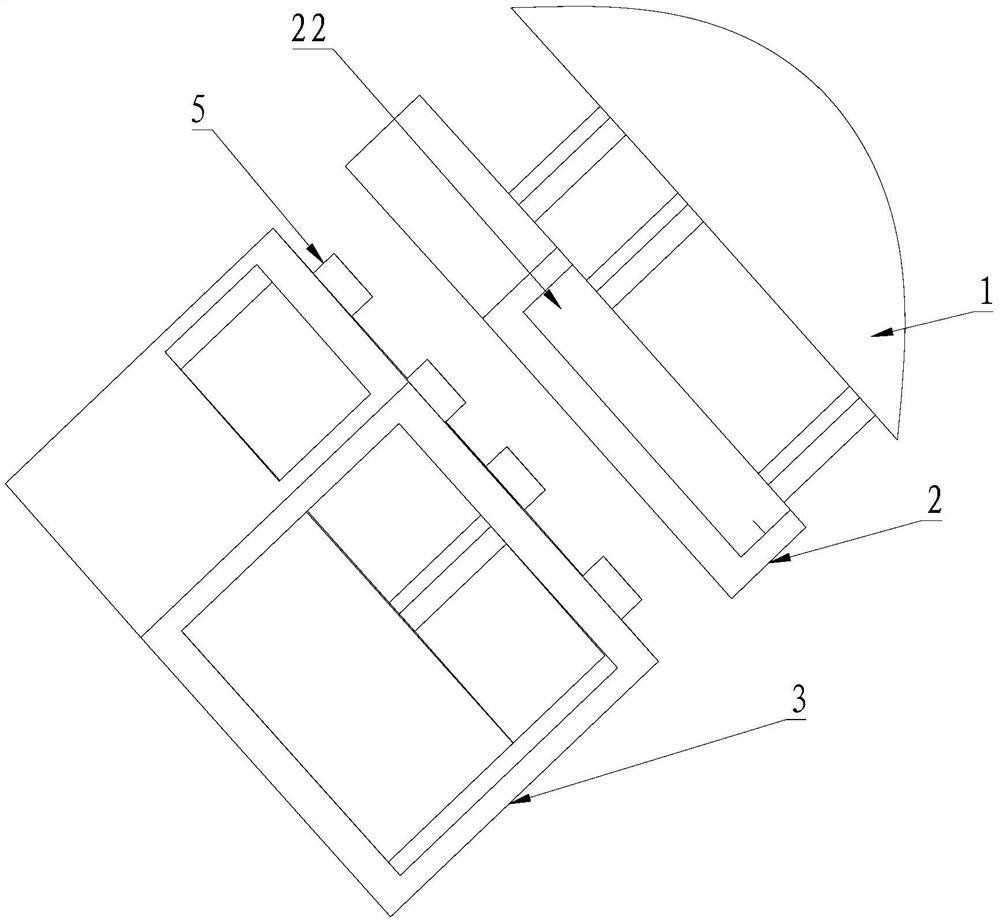
图3是本实用新型实施例无人机的电池模块的结构示意图;
图4是本实用新型实施例无人机的电池模块与机体连接后的结构示意图;
图5是本实用新型实施例无人机的电池模块的内部结构示意图;
图6是本实用新型实施例无人机的第一卡爪和第二卡爪张开后的结构示意图;
图7是本实用新型实施例无人机的第一卡爪和第二卡爪闭合后的结构示意图;
图8是本实用新型实施例无人机的螺旋桨支撑架的结构示意图。
其中,本实用新型实施例中:1、机体;10、第一电磁铁;11、第一卡爪;111、连接部;112、钩状部;12、第二卡爪;13、第二电磁铁;14、红外检测摄像头;15、机体支撑脚;16、高速离心喷头;2、螺旋桨支撑架;21、弧形防护板;22、橡胶保护层;23、支撑脚;3、螺旋桨;4、储物仓;41、抓举部;5、电池模块;51、电池组件;52、电池保护壳;53、导通件;531、导通片;532、推动部;533、复位件;534、导通磁铁。
具体实施方式
下面结合实施例及附图对本实用新型作进一步详细的描述,但本实用新型的实施方式不限于此。
如图1-8所示,本实用新型的实施例公开了一种无人机,包括机体1、设置在机体1上的螺旋桨支撑架2、转动安装在螺旋桨支撑架2 上的螺旋桨3和设置在机体1上的储物仓4,储物仓4被设置为在机体1 断电后与机体1分离。
螺旋桨支撑架2沿机体1的周向均匀间隔分布,螺旋支撑架2设置有四个,四个螺旋支撑架2设置在机体1的四个边角。每个螺旋支撑架2上均设置有一个螺旋桨3。通过设置多个螺旋桨3能够保证无人机在起飞过程中更加的平稳以及能够提高整个无人机的承载力。储物仓4用于承载待运转的物件,在本实施例中由于为植保无人机用于喷洒农药,因此,储物仓4为设置在无人机上的储药箱。储物仓4设置在机体1的下部,并且被设置在机体1断电后与储物仓4自动分离。通过上述结构设置能够在无人机出现故障时将储物仓4抛离,从而避免由于储物仓4的存在造成无人机在坠落过程中的损害加重情况出现,使无人机出现故障炸机后的损失降到最低。
具体的,在本实施例中机体1上设置有第一电磁铁10和分别与第一电磁铁10相互作用的卡爪夹持件。卡爪夹持件包括第一卡爪11和第二卡爪12;第一卡爪11的第一端和第二卡爪12的第一端分别与机体1转动连接,第一卡爪11的第二端和第二卡爪12的第二端在第一电磁铁10的吸附作用下相互靠近以夹持固定储物仓4,并在第一电磁铁 10的吸附作用撤销后相互远离以释放储物仓4。
通过第一电磁铁10控制第一卡爪11和第二卡爪12的相互靠近移动或相互远离移动以夹持或松开储物仓4。方便实现了储物仓4的释放。在本实施例中第一电磁铁10设置有两个,两个第一电磁铁10分别设置在第一卡爪11的上侧和第二卡爪12的上侧,每个第一电磁铁 10对应控制卡爪移动,从而能够更好的实现对储物仓4的夹紧抓举。
进一步的,为了更方便的实现对储物仓4的抓举,储物仓4上设置有与卡爪夹持件相适配的抓举部41,并将抓举部41设置成燕尾榫状轨道。燕尾榫状的轨道的截面的形状为倒梯形结构,抓举部41的宽度沿远离储物仓4的方向而逐渐增大。从而使抓举部41的侧壁与储物仓4的上侧壁之间形成方便卡爪抓取的凹陷部。
具体的,第一卡爪11具有与机体1转动连接的连接部111和与抓举部41相适配的钩状部112。其中,钩状部112固定在连接部111上远离机体1的一端并在钩状部112自身重力作用下使钩状部112向远离第二卡爪12的方向转动。钩状部112被设置为在第一电磁铁10的作用下向靠近第二卡爪12的方向转动。
第二卡爪12具有与第一卡爪11相同的结构,在此不做详细的展开,需要说明的是第二卡爪12在所述第一电磁铁10的作用下向靠近所述第一卡爪11的方向转动。
在本实施例中所述卡爪夹持件设置有两个,两个卡爪夹持件对称设置在机体1上;抓举部41也设置有两个,两个抓举部41对称设置在储物仓4上。通过设置多个卡爪夹持件分别夹持到机体1上的两个抓举部41上从而能够更加平稳的实现对储物仓4的连接固定。
无人机还包括可拆卸的安装固定在机体1上的电池模块5,电池模块5具有电池组件51、包覆电池组件51的电池保护壳52和用于电连接电池组件51和机体1的导通件53。电池保护壳52采用橡胶材质从而能够提高整个电池模块5的防摔性能。
机体1上设置有用于吸附电池模块5的第二电磁铁13和与导通件 53相适配的插接位,当导通件53插接到插接位时第二电磁铁13导通并对电池模块5吸附;电池保护壳52上设置有与电磁铁13相适配的磁铁。
导通件53插接到位后导通机体1进而使第二电磁铁13通电,第二电磁铁13产生对电池模块5吸附作用的吸附力,该吸附力使电池模块 5固定在机体1上。
导通件53包括导通片531、与导通片531固定连接以用于推动导通片531向插接位的方向移动的推动部532、驱使导通片531向远离插接位的方向移动的复位件533和设置在推动部532上用于与第二电磁铁13配合的导通磁铁534,导通磁铁534被第二电磁铁13吸附时以锁定导通件53的位置。
在本实施例中复位件533为压缩弹簧,且复位件533的第一端抵接在电池保护壳52的内侧壁上,复位件533的第二端抵接在推动部 532上。
在使用过程中通过按压推动部532,使推动部532带动导通片531 向靠近机体1的方向移动,从而使导通片531与相应的插接位导通,此时机体导通,机体1导通后第二电磁铁导通,从而对导通件53上的导通磁铁534起到吸附作用,以锁定导通磁铁534的位置。导通磁铁 534的位置锁定后进而锁定导通片531的位置,从而使导通件53一直处于导通状态。然而,在机体1断电后,第二电池铁对导通磁铁534 的吸附作用消失,此时,导通件53在复位件533的作用下向远离机体 1的方向移动,从而使导通片531远离插接位,从而使电池模块5与机体1进行分离。通过上述结构的设置实现了在断电状态下电池模块5 与机体1的分离,从而进一步的减轻无人机在坠机过程中的重量,降低无人机坠机过程中的损伤。此外,无人机机体1和电池模块5使用可拆卸的结构设计,方便维修更换,携带以及运输。
在机体1上还设置有红外线检测摄像头14,红外线检测摄像头14 用于向外发射红外激光,以计算前方障碍物的距离,当距离较近时通过控制系统及时的控制无人机进行急停操作,控制系统进而重新规划路线从而避免无人机撞到相应的障碍物。
螺旋桨支撑架2上设置有用于防护螺旋桨3的弧形防护板21,弧形防护板21外侧壁上设置有橡胶保护层22。螺旋桨支撑架2由材质为 PC/ABS混合材质制成的防撞保护架。同时,螺旋桨支撑架2上还设置有支撑脚23,支撑脚23材质为碳纤维符合材质,支撑脚23向地面方向延伸,在无人机下降过程中支撑脚23最先接触到地面。
在机体1上还设置有机体支撑脚15,机体支撑脚15设置在储物仓 4的两侧,机体支撑脚15对称设置在机体1的两侧,机体支撑脚15用于在无人机下降过程中防止机体1受到冲击,机体支撑脚15和支撑脚 23在无人机下降过程中同时最先接触到地面。
通过上述结构设计后的无人机具有多重防摔、防撞保护,对无人机的重要部分都加装了保护装置,最大程度地减少撞机、炸机后的损失。独特的故障电池模块5和储物仓4自动脱落保护装置,不仅能够减少由于储物仓4和电池模块5的重量的增加造成的撞击损伤的加重,而且也防止电池短路或跌落导致自燃损坏无人机。
机体1上还设置有用于喷洒农药的高速离心喷头16,高速离心喷头16对称设置在机体1的两侧,高速离心喷头16连通至储物仓4。高速离心喷头16用于将储物仓4内的药液喷洒出来。高速离心喷头16的设计不仅可以控制药液喷洒速度,也可以控制药滴大小,在满载药量时,每次装药可以喷洒40-50分钟,每次起降约可喷洒约70-100亩农田。在喷药时,无人机到达规划路线的起点时无人机自动启动高速离心喷头16开始喷药,到达规划路线终点时无人机即关闭离心喷头16以停止喷药,从而减少重喷漏喷的情况。在保证无人机效率的同时,减少药物的浪费,提高安全系数。
上述实施例为本实用新型较佳的实施方式,但本实用新型的实施方式并不受上述实施例的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
一种无人机专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0