









专利摘要
本发明提供一种大可控行程微作动器,包括:动极板、极板底座、嵌入式镍极板弹簧和定极板,其中:所述嵌入式镍极板弹簧呈“一”字形,伸入所述动极板中央,沿所述动极板中轴线对称布置在所述动极板中央的两侧,所述嵌入式镍极板弹簧一端固定在所述极板底座长度方向的中点上,另一端固定在所述动极板中央,所述嵌入式镍极板弹簧在所述动极板运动过程中产生的弹性回复力与弹簧变形量为非线性关系。本发明明显提高了微机械作动器的可控行程、降低了驱动电压,同时减少了对响应速度的不利影响。
权利要求
1.一种大可控行程微作动器,其特征在于,包括:动极板、极板底座、嵌入式镍极板弹簧和定极板,其中:所述极板底座位于所述定极板的两侧,所述动极板通过所述嵌入式镍极板弹簧、所述极板底座固定在所述定极板的正上方,能够相对于所述定极板上下运动;所述动极板、定极板之间为工作气隙;
所述嵌入式镍极板弹簧呈“一”字形,伸入所述动极板中央,沿所述动极板中轴线对称布置在所述动极板中央的两侧,所述嵌入式镍极板弹簧一端固定在所述极板底座长度方向的中点上,另一端固定在所述动极板中央,所述嵌入式镍极板弹簧在所述动极板运动过程中产生的弹性回复力与弹簧变形量为非线性关系。
2.根据权利要求1所述的大可控行程微作动器,其特征在于,所述动极板上包含加强筋,以使所述动极板本身的结构刚度远大于所述嵌入式镍极板弹簧的刚度,在所述动极板上下运动时,保持平动状态而不发生扭转,从而使得所述动极板下方不同平面位置上的工作气隙保持相同。
3.根据权利要求1所述的大可控行程微作动器,其特征在于,所述定极板的上表面设有绝缘层,用于防止所述动极板与所述定极板接触时发生短路。
4.根据权利要求1-3任一项所述的大可控行程微作动器,其特征在于,所述嵌入式镍极板弹簧的长宽比大于10,宽厚比大于5,厚度小于2微米,所述工作气隙与所述嵌入式镍极板弹簧厚度比大于5。
5.根据权利要求3所述的大可控行程微作动器,其特征在于,通过改变所述嵌入式镍极板弹簧的平面形状、长度、宽度或厚度中一种或多种参数,可以改变嵌入式镍极板弹簧的非线性特性。
6.根据权利要求5所述的大可控行程微作动器,其特征在于,所述嵌入式镍极板弹簧的非线性特性包括初始刚度以及刚度随变形量增加而增大的速度。
7.根据权利要求4所述的大可控行程微作动器,其特征在于,在所述动极板向下运动的过程中,所述嵌入式镍极板弹簧变形量超过所述嵌入式镍极板弹簧的厚度,所述嵌入式镍极板弹簧的长度增大,导致所述嵌入式镍极板弹簧一方面发生弯曲变形,另一方面沿着长度方向发生拉伸,形成几何非线性大变形,该种变形使得嵌入式镍极板弹簧产生的弹性回复力与弹簧变形量为非线性关系,即整个作动器的结构刚度不再是常数,而是随着作动器的位移变大而迅速变大。
说明书
技术领域
本发明涉及一种精密机械技术领域的微机械作动器,具体地,涉及一种大可控行程微作动器。
背景技术
基于MEMS技术的光开关、微继电器和射频开关等器件分别是应用于未来全光通信网、先进仪器仪表和控制系统、相控阵雷达与移动通信等领域的基础性关键器件。这类器件通常工作在开、关状态,驱动行程在数微米至100微米,驱动力为微牛顿至毫牛顿量级、响应时间在毫秒至微秒量级,要求低功耗、低电压、响应快、寿命长。目前这类器件通常是基于静电驱动或电磁驱动原理。对于这两类驱动原理的驱动器,由于静电力和电磁力都会随着作动器工作气隙的减小而非线性增大,导致驱动力的增加远远大于结构弹簧回复力的增加,进而导致失稳现象。这一方面导致作动器的可控行程缩短,另一方面由于输入电压和输出位移之间存在的严重非线性也会导致作动器的输出难以准确调整。目前,在光开关、微继电器、射频开关等器件研究领域,具有较大可控行程的微作动器正受到越来越多的关注,国内外相关机构纷纷开展研究。
经对现有技术文献的检索发现,B.Rivlin等人在《JOURNAL OF MICROELECTROMECHANICAL SYSTEMS》(微机电系统学报),撰文“A gap-closing electrostatic actuator with a linear extended range”(一种扩大线性驱动范围的静电驱动器)”,提出了一种输入电压与输出位移之间具有线性关系的微作动器结构方案,利用一个特殊轮廓的凸轮支撑块,连续调整微作动器悬臂梁在驱动过程中的有效力臂长度,从而使得微作动器悬臂梁的等效刚度随着输出位移的增大而增大,从而避免了输出位移增加时,静电驱动力远远大于微作动器结构弹性回复力的情况,使得输入电压与输出位移间近似呈线性关系,作动器可控行程达到总气隙的85%。该驱动器虽然性能有了明显改善,但是仍然存在以下不足:该驱动器仅适用于面内运动的场合,难以在面外运动作动器中应用,该设计需要引入特殊形状的凸轮支撑块,器件结构复杂,难以进一步微型化。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种大可控行程微作动器,结构简洁,无需复杂凸轮支撑块,满足器件对微作动器在可控行程、准确性等方面的综合要求。
为实现上述目的,本发明采用以下技术方案实现的:
一种大可控行程微作动器,包括:动极板、极板底座、嵌入式镍极板弹簧和定极板,其中:
所述极板底座位于所述定极板的两侧,所述动极板通过所述嵌入式镍极板弹簧、所述极板底座固定在所述定极板的正上方,能够相对于定极板上下运动,所述动极板、定极板之间为工作气隙;
所述嵌入式镍极板弹簧呈“一”字形,伸入所述动极板中央,沿所述动极板中轴线对称布置在所述动极板中央的两侧,所述嵌入式镍极板弹簧一端固定在所述极板底座长度方向的中点上,另一端固定在所述动极板中央,所述嵌入式镍极板弹簧在所述动极板运动过程中产生的弹性回复力与弹簧变形量为非线性关系。
优选地,所述动极板上包含加强筋,以使所述动极板本身的结构刚度远大于所述嵌入式镍极板弹簧的刚度,在所述动极板上下运动时,保持平动状态而不发生扭转,从而使得所述动极板下方不同平面位置上的工作气隙保持相同。
优选地,所述定极板的上表面设有绝缘层,用于防止所述动极板与所述定极板接触时发生短路。
优选地,所述嵌入式镍极板弹簧的长宽比大于10,宽厚比大于5,厚度小于2微米,气隙与弹簧厚度比大于5。
更优选地,通过改变所述嵌入式镍极板弹簧的平面形状、长度、宽度或厚度中一种或多种参数,可以改变嵌入式镍极板弹簧的非线性特性,包括初始刚度以及刚度随变形量增加而增大的速度。
本发明通过采用嵌入式镍极板弹簧,在提高微机械作动器可控输出行程、输出准确性的同时,有效简化了器件结构,缩小了器件尺寸,降低了设计和集成制造的难度。
具体的,本发明的设计原理在于:
(1)将极板弹簧设计成嵌入式结构,在进一步降低驱动电压,明显降低分析、设计难度的同时,有效缩小了器件的尺寸。
如果按照现有常规技术,将极板弹簧布置在动极板四周,由于此时动极板的刚度远大于极板弹簧,在分析极板弹簧变形时需要将其等效为一端固定,另一端为垂直滑动的悬臂梁,作用在动极板的静电力或电磁力需作为分布力处理,动极板上不同位置的静电力或电磁力相对于固定端的力臂不同,分析静电力或电磁力-变形过程十分复杂。
相比之下,本发明中创造性地采用“一”字形的嵌入式镍极板弹簧且嵌入式镍极板弹簧深入动极板中央的结构设计,与镍极板弹簧长度相比,两侧镍极板弹簧间距很短,因此在分析嵌入式镍极板弹簧非线性条件下的变形和应变时,可以将对称布置在动极板中央两侧的嵌入式镍极板弹簧近似作为一根固定端为动极板两侧极板底座上的连续悬臂梁来分析,即抽象为一根两端固定的悬臂梁,作用在动极板的静电力或电磁力可以认为是作用在极板中央的集中力,即力臂最长的位置,一方面避免了动极板本身的结构刚度对于分析极板弹簧变形的影响,另一方面与静电力或电磁力分布在动极板上各处相比,能够显著降低驱动电压,同时明显简化了分析过程,降低了设计的难度。
与此同时,由于悬臂梁深入动极板中央,与极板弹簧布置在动极板四周相比,在悬臂梁长度相等的情况下,所占用的器件面积明显减小;而且用两根悬臂梁即可达到需要四根悬臂梁才能达到的效果,在相同刚度、相同长度、相同材料时,本发明中嵌入式镍极板弹簧的厚度可以比布置在动极板四周的极板弹簧增大20%以上,有助于提高悬臂梁抵抗冲击过载的能力。
(2)工作中,当向动极板、定极板施加驱动电压时会在两块极板之间产生静电或电磁吸合力,克服嵌入式镍极板弹簧产生的弹性回复力,使动极板相对于定极板向下运动。由于嵌入式镍极板弹簧的长宽比大于10,宽厚比大于5,厚度小于2微米,材料为金属镍,在动极板向下运动的过程中,变形量大于5微米,明显超过嵌入式镍极板弹簧的厚度,嵌入式镍极板弹簧的长度增大,由此导致嵌入式镍极板弹簧一方面发生弯曲变形,另一方面沿着长度方向发生拉伸,由此导致的非线性大变形使得嵌入式镍极板弹簧产生的弹性回复力与弹簧变形量为非线性关系,也就是说,作动器的结构刚度不再是常数,而是随着作动器的位移变大而迅速变大,当到达吸合位置时,结构刚度可达初始值的10倍以上,对应的弹性回复力也远远大于线性弹簧。因此,当接近吸合位置时,虽然此时由于定极板与动极板的间距变小,外加驱动力(静电力或电磁力)急剧增大,仍然可以避免由于外加驱动力的增大速度远大于弹性回复力的增大速度导致结构发生失稳,从而有效增大了微机械作动器的可控输出行程。
(3)由于所设计的微机械作动器结构刚度呈开始小,随输出位移增加逐渐变大的特点,这意味着与吸合位置弹性回复力相等的线性弹簧相比,本发明所提出的微作动器嵌入式镍极板弹簧的初始结构刚度要远小于基于线性弹簧的微作动器,因此在初始位置,动极板与定极板的间距最大时,由于本发明的嵌入式镍极板弹簧初始结构刚度小,对应的弹性回复力小,只需要较小的驱动电压就可以在动极板与定极板之间产生足够的静电或电磁吸合力,克服嵌入式镍极板弹簧的弹性回复力使动极板向下运动,从而有效降低了微机械作动器的工作电压。
现有技术中也有通过降低极板弹簧刚度减小驱动电压的方案,但由于所采用的是线性弹簧,在微作动器的工作行程范围内弹簧刚度都较小,由此导致微作动器的响应速度下降。而本发明中,由于嵌入式镍极板弹簧虽然初始刚度较小,但弹簧刚度会随着动极板位移的增大而不断增大,从而避免了工作行程中弹簧刚度保持较低值引起的响应速度明显下降。而随着动极板位移增大、气隙减小,驱动动极板向下运动的静电力或电磁力增加的幅度大于嵌入式镍极板弹簧弹性回复力增加的幅度,驱动力仍然能够克服弹性回复力确保微机械作动器可靠动作。
与现有技术相比,本发明具有如下的有益效果:
本发明总体结构简洁,无需复杂凸轮支撑块,但明显提高了微机械作动器的可控行程、降低了驱动电压,同时减少了对响应速度的不利影响。
具体的,本发明采用嵌入式镍极板弹簧呈“一”字形,伸入所述动极板中央,其结构刚度不是固定值,而是随着弹簧变形量的增加而迅速增大,因此显著削弱了采用传统线性弹簧结构时,气隙缩小过程中静电或电磁驱动力非线性急剧增大而弹性回复力仅线性增加所导致的受力失衡,进而造成的失稳现象,明显提高了可控行程。
另一方面,本发明采用的嵌入式镍极板弹簧,其初始刚度值较低,随着输出位移不断增大,但低于驱动静电力或电磁力的增大速度。这种特性在确保微机械作动器可靠切换的前提下,有效降低了工作电压,减少了刚度降低对响应速度的不利影响。
进一步的,本发明大大降低了器件结构设计的复杂度,更加适用于采用集成电路工艺实现大规模批量化制造。
由于采用了嵌入式镍极板弹簧的基本架构,在分析设计过程中避免了动极板刚度对极板弹簧变形的影响,显著降低了驱动电压,大大降低了分析设计的难度,同时在性能相当的情况下,进一步缩小了器件尺寸,提高了抗冲击性能。另外,由于非线性变形力的产生是借助于嵌入式镍极板弹簧本身的非线性特性产生,无须额外布置凸轮支撑块等结构,因此结构大为简化。
当需要调整嵌入式镍极板弹簧力与变形量的非线性时,通过改变掩模版的平面布局即可改变嵌入式镍极板弹簧的平面形状、长度、宽度,通过改变微电铸时间即可改变嵌入式镍极板弹簧的厚度。这些调整借助现有的集成电路工艺即可实现。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
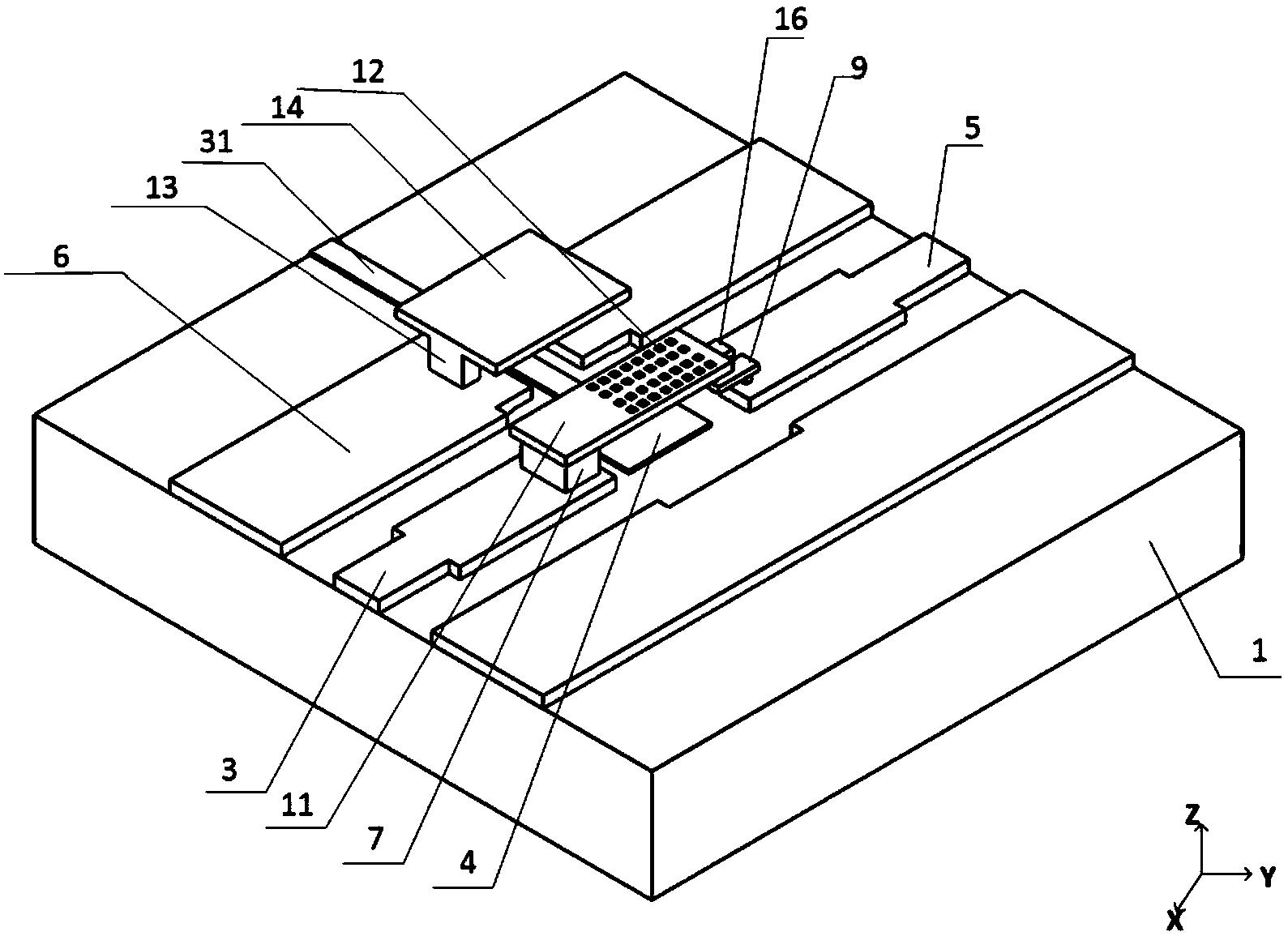
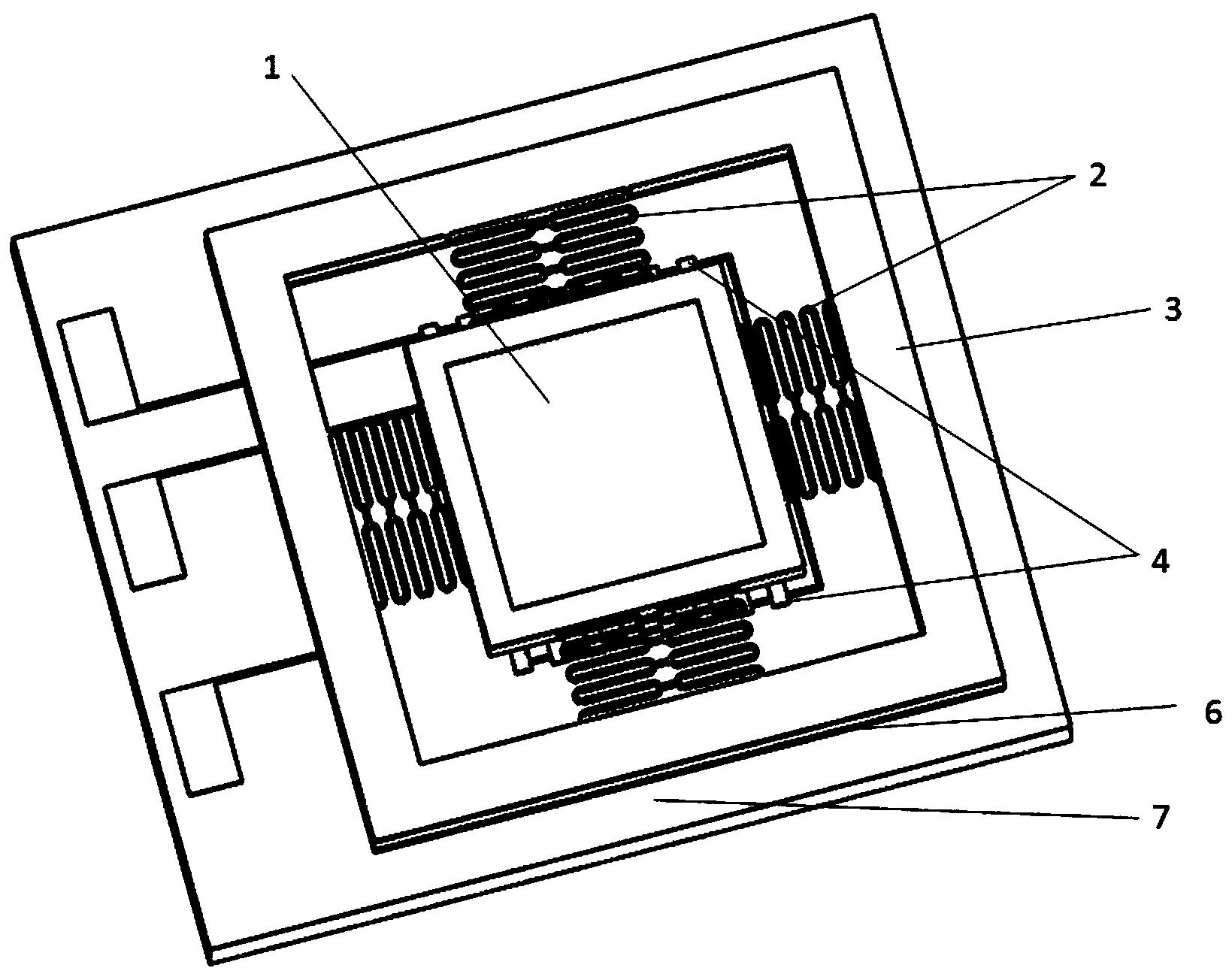
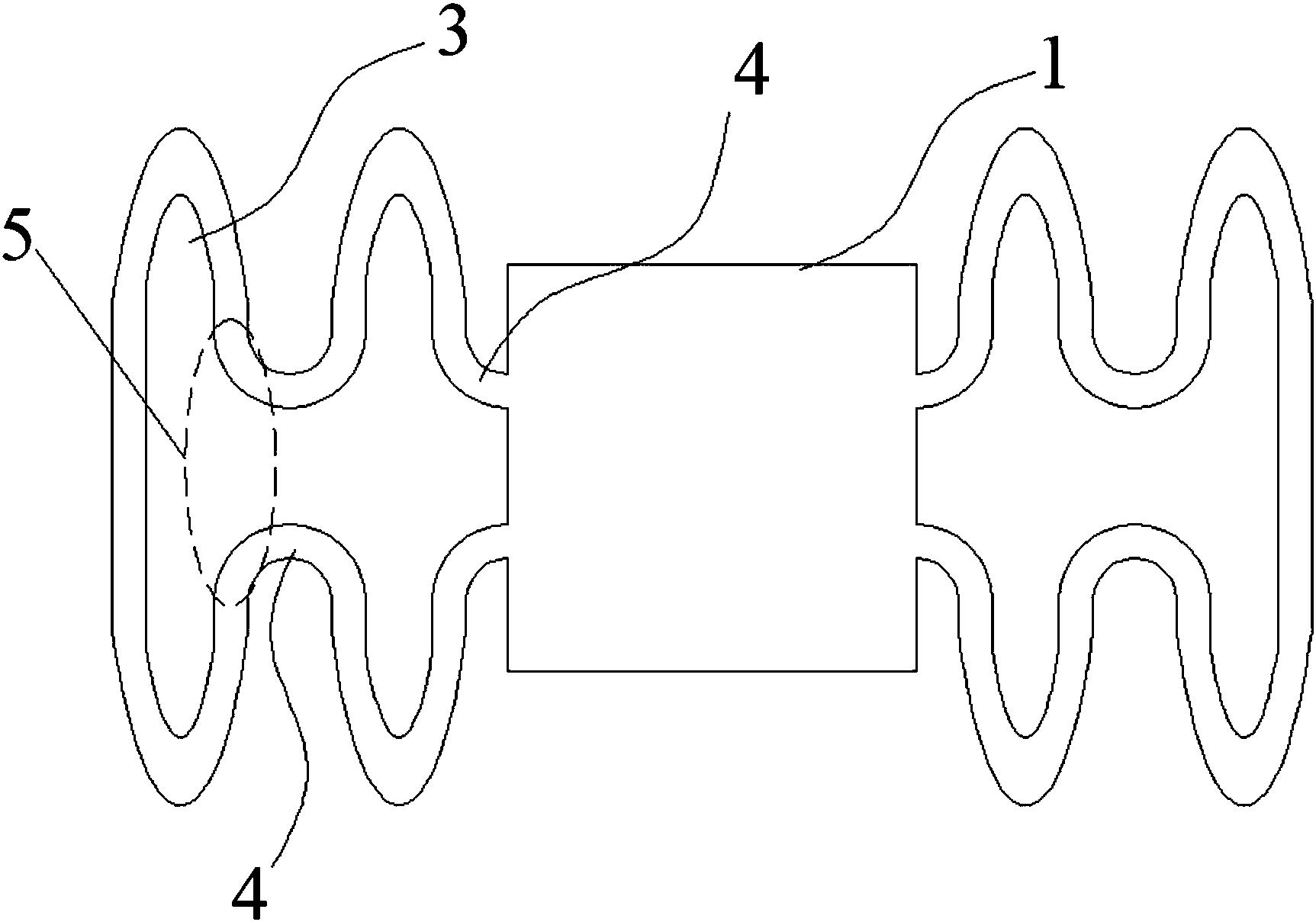
图1a为本发明实施例1中作动器的俯视图;
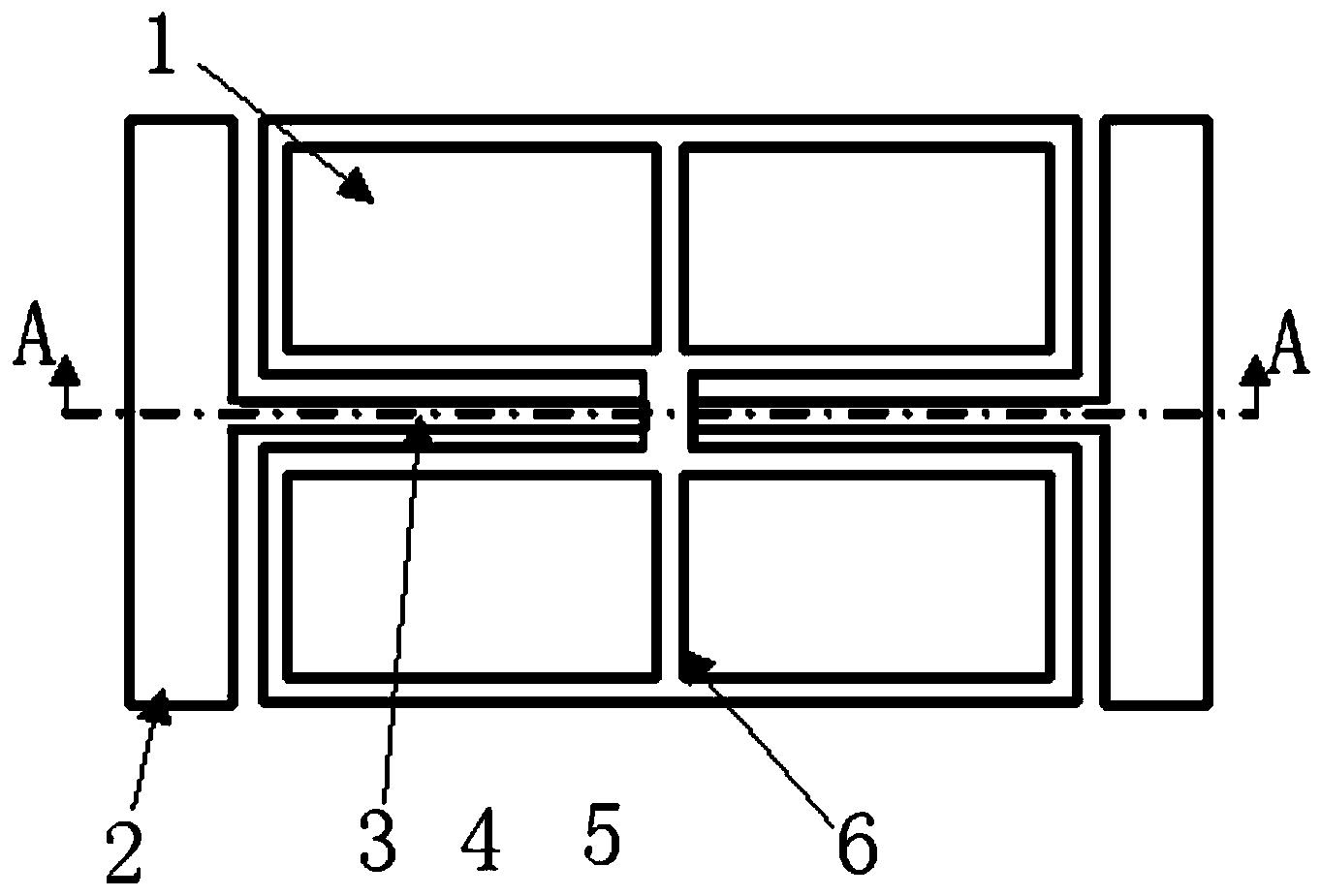
图1b为图1a所示A-A截面图;
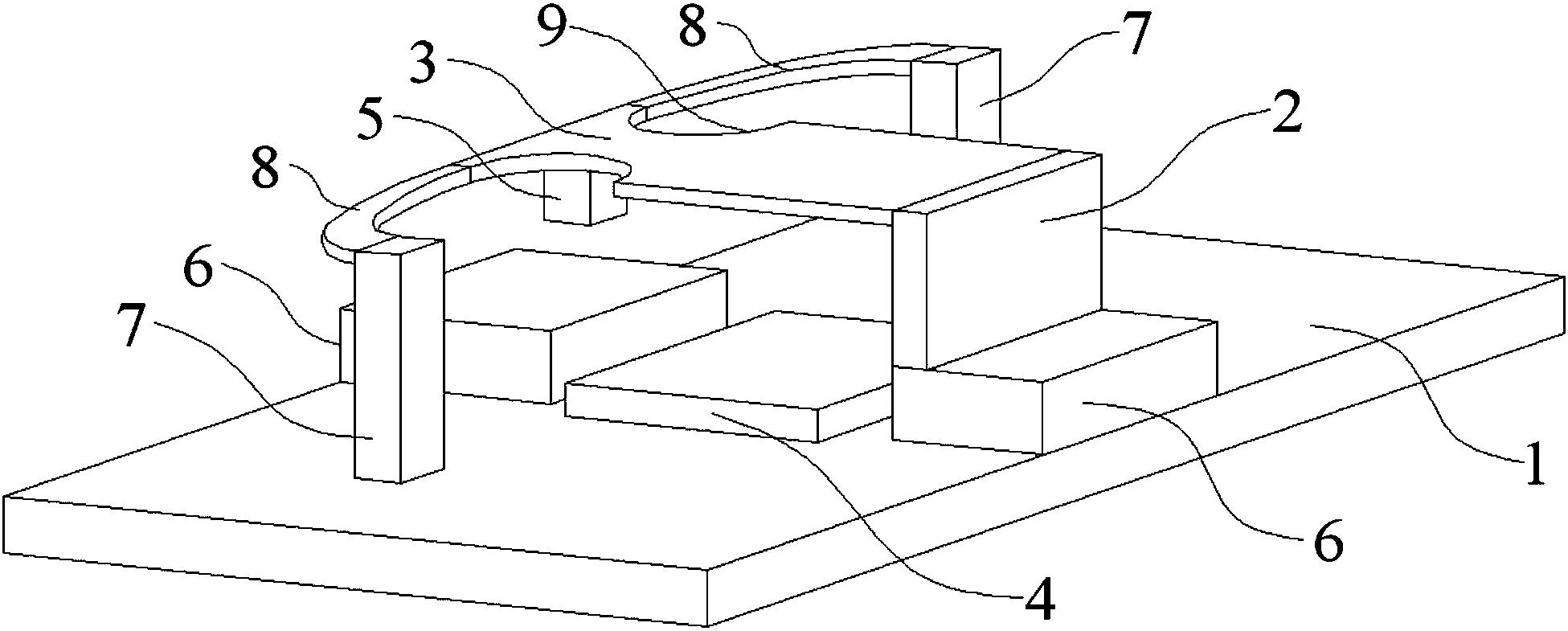
图2a为本发明实施例2中作动器的俯视图;
图2b为图2a所示B-B截面图;
图中:动极板1、极板底座2、嵌入式镍极板弹簧3、定极板4、绝缘层5、加强筋6、镍极板7、工作气隙8、驱动线圈9。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
实施例1
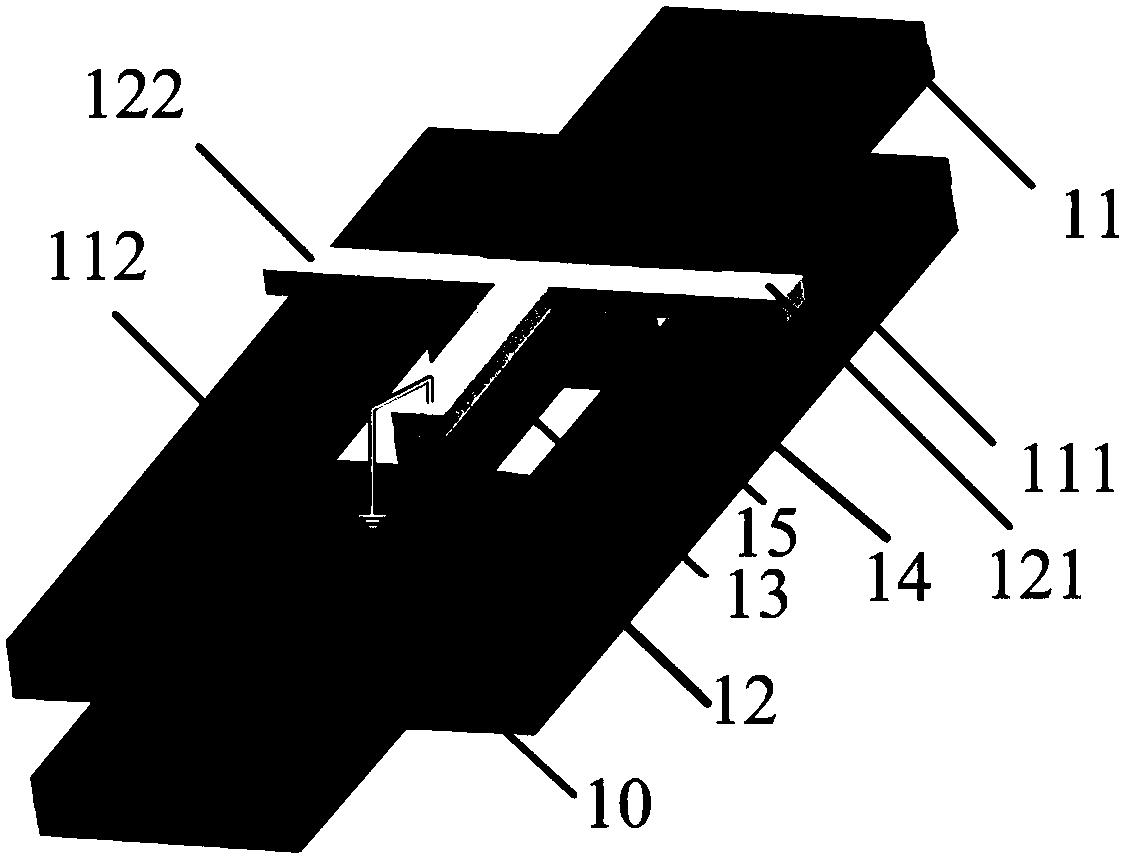
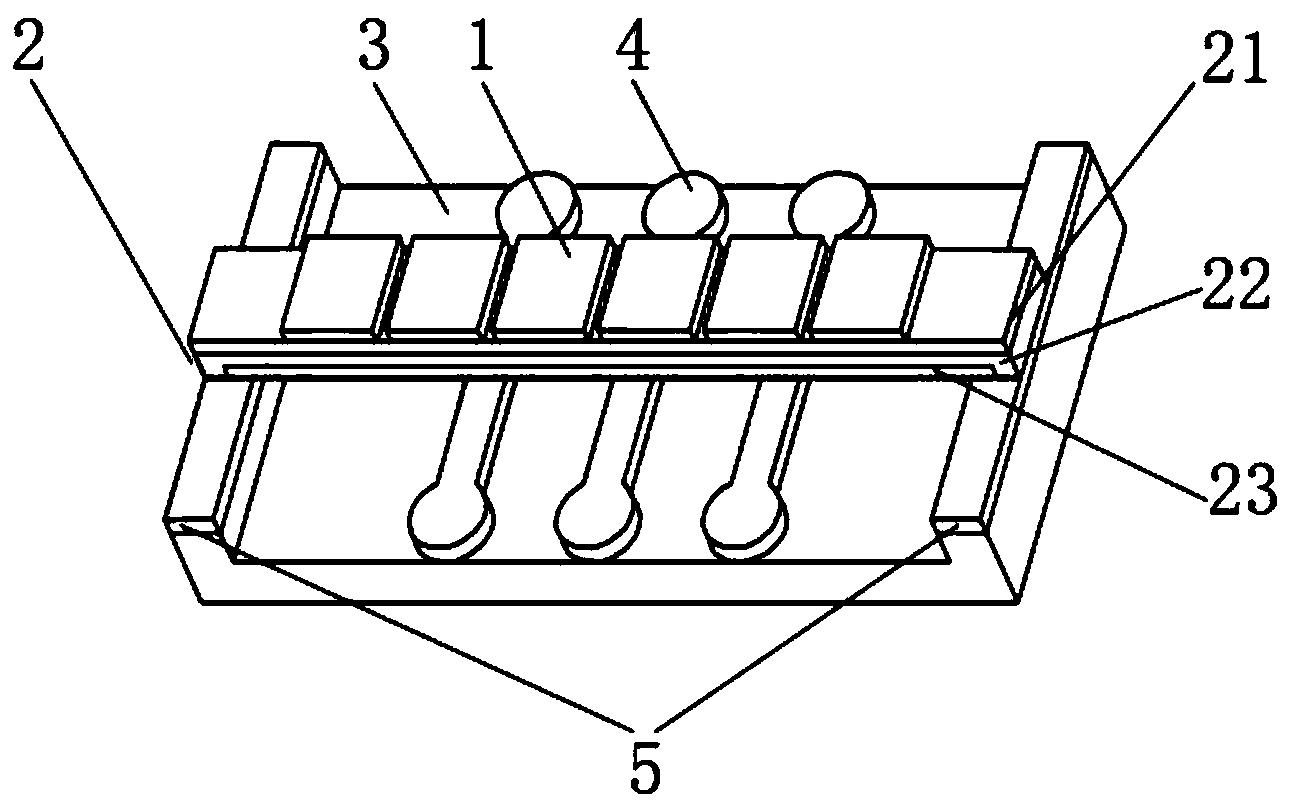
如图1a、1b所示,本实施例提供一种结构简洁,可实现面外运动的大可控行程微机械作动器。
本实施例所述大可控行程微机械作动器,包括:动极板1、极板底座2、嵌入式镍极板弹簧3、定极板4。其中:
所述定极板4由绝缘层5和镍极板7构成;
所述绝缘层5为二氧化硅绝缘层;
所述动极板1为镍动极板;
所述极板底座2为镍极板底座;
所述极板底座2位于定极板4的两侧,动极板1通过嵌入式镍极板弹簧3与极板底座2固定在定极板4的正上方,能够相对于定极板4上下运动;
所述绝缘层5布置在镍极板7上表面,防止动极板1与镍极板7接触时发生短路。
如图1a所示,本实施例中,嵌入式镍极板弹簧3呈“一”字形,伸入动极板1中央,沿动极板1中轴线对称布置在极板中央的两侧。嵌入式镍极板弹簧3一端固定在极板底座2长度方向的中点上,另一端固定在动极板1中央。
作为一优选,本实施例中,嵌入式镍极板弹簧3的长度为200μm,宽度为10μm,厚度为1.5微米,工作气隙8为10微米,两侧极板弹簧间距为40μm,远远小于两侧极板弹簧的总长度400μm。因此在分析嵌入式镍极板弹簧3非线性条件下的变形和应变时,可以将对称布置在动极板中央两侧的嵌入式镍极板弹簧3近似作为一根固定端为动极板两侧极板底座上的连续悬臂梁来分析,即抽象为一根两段固定的悬臂梁,作用在动极板1的静电力可以认为是作用在动极板1中央的集中力,避免了动极板1本身的结构刚度对于分析嵌入式镍极板弹簧3变形的影响,与静电力分布在动极板1上各处相比,能够显著降低驱动电压,同时明显简化了分析过程,降低了设计的难度。与此同时,由于悬臂梁深入动极板1中央,与极板弹簧布置在动极板四周相比,在悬臂梁长度相等的情况下,所占用的器件面积明显减小;而且用两根悬臂梁即可达到需要四根悬臂梁才能达到的效果,在相同刚度,相同长度,相同材料时,本发明方案中嵌入式镍极板弹簧3的厚度可以比布置在动极板四周的极板弹簧增大20%以上,有助于提高悬臂梁抵抗冲击过载的能力。
作为一优选,嵌入式镍极板弹簧3材料为采用电镀方法制备的金属镍,已有研究表明,其屈服极限可达1954MPa,远远超过宏观的块体镍材料,因此能够在发生大变形(例如变形量与弹簧厚度之比大于5)后回到初始形状而不致由于塑性变形使器件结构失效。
当向动极板1、定极板4施加驱动电压时会在两块极板之间产生静电吸合力,克服嵌入式镍极板弹簧产生的弹性回复力,使动极板相对于定极板向下运动。本实施例中,由于嵌入式镍极板弹簧的长宽比为20,宽厚比大于6,厚度为1.5微米,在动极板1向下运动的过程中,变形量约9微米,明显超过嵌入式镍极板弹簧3的厚度,嵌入式镍极板弹簧3的长度增大,由此导致嵌入式镍极板弹簧3一方面发生弯曲变形,另一方面沿着长度方向发生拉伸,由此导致的非线性大变形使得嵌入式镍极板弹簧3产生的弹性回复力与弹簧变形量为非线性关系,也就是说,作动器的结构刚度不再是常数,而是随着作动器的位移变大而迅速变大,当到达吸合位置时,结构刚度可达初始值的10倍以上,对应的弹性回复力也远远大于线性弹簧。因此,当接近吸合位置时,虽然此时由于定极板与动极板的间距变小,外加静电力急剧增大,仍然可以避免由于外加静电力的增大速度远大于弹性回复力的增大速度导致结构发生失稳,从而有效增大了微机械作动器的可控输出行程。
由于所设计的微机械作动器结构刚度呈开始小,随输出位移增加逐渐变大的特点,这意味着与吸合位置弹性回复力相等的线性弹簧相比,嵌入式镍极板弹簧3的初始结构刚度要远小于基于线性弹簧的微作动器,因此在初始位置,动极板1与定极板4的间距最大时,由于嵌入式镍极板弹簧3初始结构刚度小,对应的弹性回复力小,只需要较小的驱动电压就可以在动极板1与定极板4之间产生足够的静电吸合力,克服嵌入式镍极板弹簧的弹性回复力使动极板向下运动,从而有效降低了微机械作动器的工作电压。嵌入式镍极板弹簧3初始刚度较小,但弹簧刚度会随着动极板位移的增大而不断增大,从而避免了工作行程中弹簧刚度保持较低值引起的响应速度明显下降。而随着动极板位移增大、气隙减小,驱动动极板1向下运动的静电力增加的幅度大于嵌入式镍极板弹簧3弹性回复力增加的幅度,驱动力仍然能够克服弹性回复力确保微机械作动器可靠动作。
实施例2
在实施例1的基础上,本实施例中不同之处在于:动极板1上包含加强筋6,以确保动极板1本身的结构刚度远大于嵌入式镍极板弹簧3的刚度,在微机械作动器动极板1上下运动时,保持平动状态而不发生扭转,从而确保动极板1下方不同平面位置上的工作气隙8保持一致。
实施例3
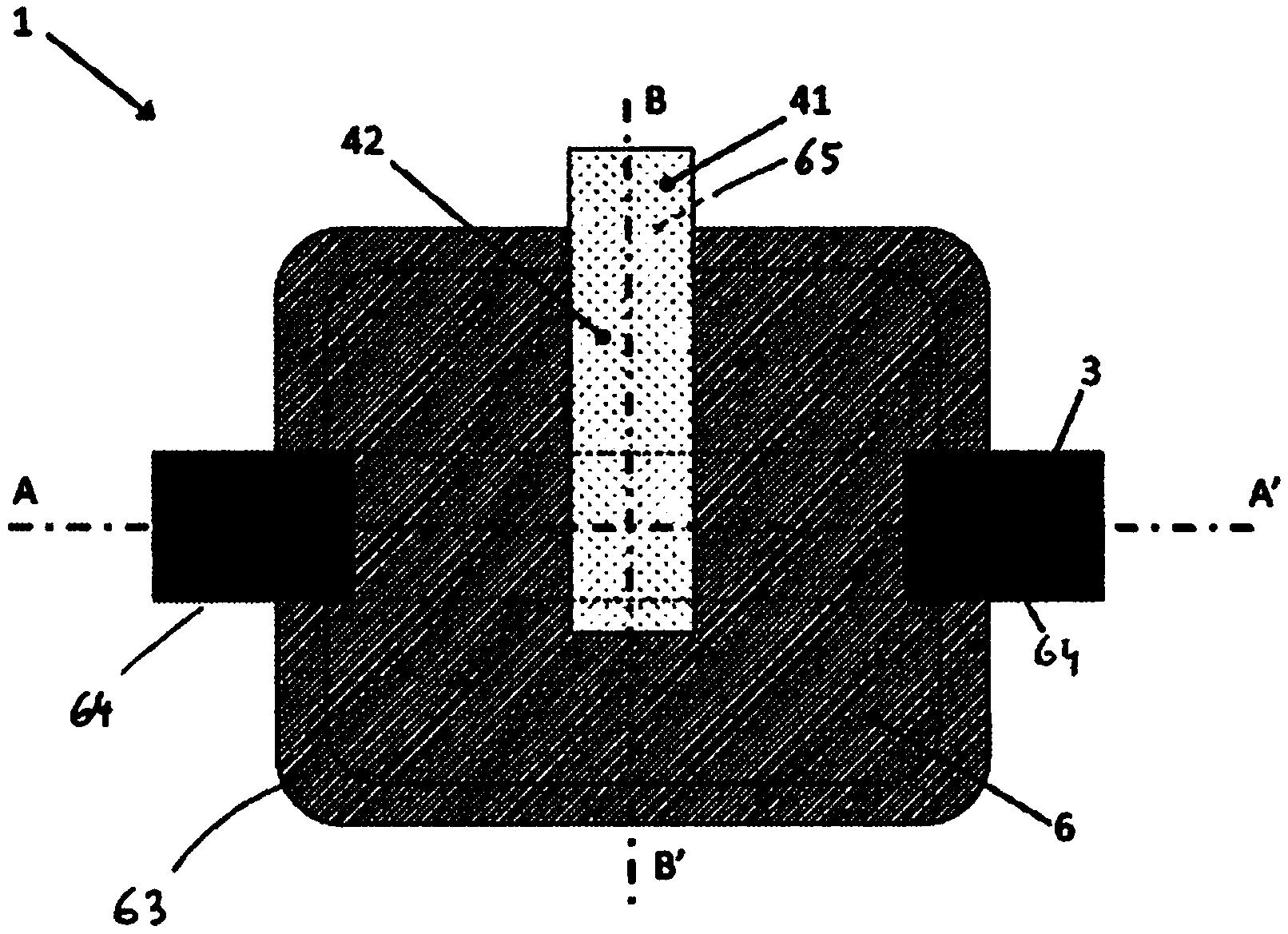
如图2a、2b所示,本实施提供一种结构简洁,可实现面外运动的大可控行程微机械作动器。
本实施例大可控行程微机械作动器,包括:动极板1、极板底座2、嵌入式镍极板弹簧3、定极板4;其中:
所述定极板4由绝缘层5和驱动线圈9构成;
所述绝缘层5为聚酰亚胺绝缘层。
所述动极板1为镍动极板;
所述极板底座2为镍极板底座;
所述极板底座2位于驱动线圈9的两侧,所述动极板1通过嵌入式镍极板弹簧3与极板底座2固定在驱动线圈9的正上方,能够相对于驱动线圈9上下运动;
绝缘层5布置在驱动线圈9上表面,防止动极板1与驱动线圈9接触时发生短路。
如图2a所示,本实施例中,所述嵌入式镍极板弹簧3呈“一”字形,伸入动极板1中央,沿动极板1中轴线对称布置在极板中央的两侧。嵌入式镍极板弹簧3一端固定在极板底座2长度方向的中点上,另一端固定在动极板1中央。
作为一种优选,嵌入式镍极板弹簧3的长度为260μm,动极板1一侧宽度为25μm,极板底座2一侧宽度为20μm,厚度为2微米,工作气隙8为25微米,材料为金属镍。采用该种参数的实施例,可以确保随着气隙的缩小,所述嵌入式镍极板弹簧3弹性回复力的增加速度小于驱动线圈9产生的电磁吸合力增大的速度。
进一步的,在上述参数的基础上,两侧极板弹簧间距为50μm,远远小于两侧极板弹簧的总长度520μm,因此在分析嵌入式镍极板弹簧3非线性条件下的变形和应变时,可以将对称布置在动极板1中央两侧的嵌入式镍极板弹簧3近似作为一根固定端为动极板1两侧极板底座2上的连续悬臂梁来分析,即抽象为一根两段固定的悬臂梁,作用在动极板1的电磁力可以认为是作用在动极板1中央的集中力,避免了动极板1本身的结构刚度对于分析所述嵌入式镍极板弹簧3变形的影响,与电磁力分布在动极板1上各处相比,能够显著降低驱动电压,同时明显简化了分析过程,降低了设计的难度。与此同时,由于悬臂梁深入动极板1中央,与极板弹簧布置在动极板四周相比,在悬臂梁长度相等的情况下,所占用的器件面积明显减小;而且用两根悬臂梁即可达到需要四根悬臂梁才能达到的效果,在相同刚度、相同长度、相同材料时,本发明中嵌入式镍极板弹簧3的厚度可以比布置在动极板四周的极板弹簧增大20%以上,有助于提高悬臂梁抵抗冲击过载的能力。
作为一种优选,嵌入式镍极板弹簧1材料为采用电镀方法制备的金属镍,已有研究表明,其屈服极限可达1954MPa,远远超过宏观的块体镍材料,因此能够在发生大变形(例如变形量与弹簧厚度之比大于5)后回到初始形状而不致由于塑性变形使器件结构失效。
当向驱动线圈9施加驱动电压时会在动极板1与驱动线圈9之间产生电磁吸合力,克服嵌入式镍极板弹簧3产生的弹性回复力,使动极板1相对于驱动线圈9向下运动。上述实施例中,由于嵌入式镍极板弹簧3的长宽比大于10,宽厚比大于9,厚度为2微米,在动极板向下运动的过程中,变形量约20微米,明显超过嵌入式镍极板弹簧3的厚度,嵌入式镍极板弹簧3的长度增大,由此导致嵌入式镍极板弹簧3一方面发生弯曲变形,另一方面沿着长度方向发生拉伸,由此导致的非线性大变形使得嵌入式镍极板弹簧3产生的弹性回复力与弹簧变形量为非线性关系,也就是说,作动器的结构刚度不再是常数,而是随着作动器的位移变大而迅速变大,当到达吸合位置时,结构刚度可达初始值的10倍以上,对应的弹性回复力也远远大于线性弹簧。因此,当接近吸合位置时,虽然此时由于定极板与动极板的间距变小,外加静电力急剧增大,仍然可以避免由于外加静电力的增大速度远大于弹性回复力的增大速度导致结构发生失稳,从而有效增大了微机械作动器的可控输出行程。
由于所设计的微机械作动器结构刚度呈开始小,随输出位移增加逐渐变大的特点,这意味着与吸合位置弹性回复力相等的线性弹簧相比,嵌入式镍极板弹簧3的初始结构刚度要远小于基于线性弹簧的微作动器,因此在初始位置,动极板1与驱动线圈9的间距最大时,由于嵌入式镍极板弹簧3初始结构刚度小,对应的弹性回复力小,只需要较小的驱动电压就可以在动极板1与驱动线圈9之间产生足够的电磁吸合力,克服嵌入式镍极板弹簧的弹性回复力使动极板向下运动,从而有效降低了微机械作动器的工作电压。嵌入式镍极板弹簧3初始刚度较小,但弹簧刚度会随着动极板位移的增大而不断增大,从而避免了工作行程中弹簧刚度保持较低值引起的响应速度明显下降。而随着动极板位移增大、气隙减小,驱动动极板1向下运动的电磁力增加的幅度大于嵌入式镍极板弹簧3弹性回复力增加的幅度,驱动力仍然能够克服弹性回复力确保微机械作动器可靠动作。
实施例4
在实施例3的基础上,本实施例中不同之处在于:动极板1上包含加强筋6,以确保动极板1本身的结构刚度远大于嵌入式镍极板弹簧3的刚度,在微机械作动器动极板1上下运动时,保持平动状态而不发生扭转,从而确保动极板1下方不同平面位置上的工作气隙8保持一致。
上述实施例附图中,相同的附图标记代表相同的零部件或作用同等的零部件,且描述中使用的“上”、“下”、“前”、“后”、“左”、“右”等类似的术语仅指相对于图形而言,目的是为了方便地描述本发明。
上述实施例所有附图仅仅是为了便于解释说明本发明的技术内容;构成最优实施方式所采用的数字、零部件的位置、零部件之间的相互关系以及零部件的尺寸等技术特征不构成对技术方案本身的限定,而应延伸至该技术领域所覆盖的整个领域。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。
一种大可控行程微作动器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0