








专利摘要
本发明的目的在于提供索杆式伸展臂,包括3个可以伸缩的可展单元,每一个可展单元由6个滑轮、4个杆构件、1个连接件组成和6根索组成,杆构件与连接件通过转动副连接,各索构件利用滑轮导向,并通过控制索构件的长度变化来控制整个可展机构的展开和折叠。整个机构处于同一个平面内,杆构件位于索构件的夹角内,保证了整个机构折叠和展开的稳定性。本发明本身具有良好的展开和折叠能力,同时多个这样的单元拼接,即可其组建具有质量轻、收纳率大、可展性能好等优点的大型可展结构。由于结构自身的优越性,如果保证结构中的索构件的长度不变,且不需要任何锁紧装置,就可使得机构在任何位置、任何时刻锁紧。
权利要求
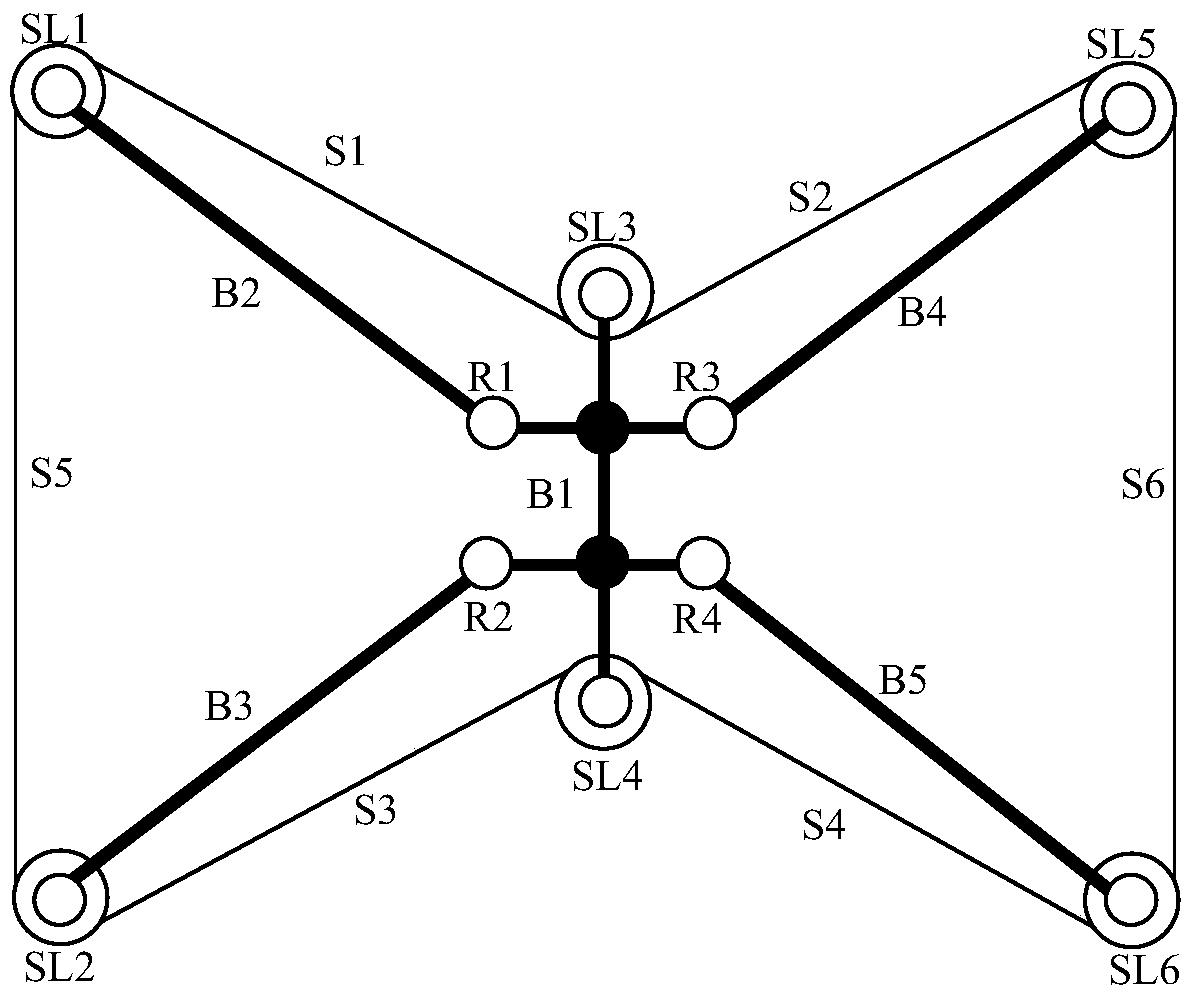
1.索杆式伸展臂,其特征是:包括第一伸展单元,第一伸展单元包括竖向杆(B1)、第一斜向杆(B2)、第二斜向杆(B3)、第三斜向杆(B4)、第四斜向杆(B5)、第一滑轮(SL1)、第二滑轮(SL2)、第三滑轮(SL3)、第四滑轮(SL4)、第五滑轮(SL5)、第六滑轮(SL6)、第一转动副(R1)、第二转动副(R2)、第三转动副(R3)、第四转动副(R4),第一斜向杆(B2)、第二斜向杆(B3)、第三斜向杆(B4)、第四斜向杆(B5)分别通过第一转动副(R1)、第二转动副(R2)、第三转动副(R3)、第四转动副(R4)与竖向杆(B1)相连,第一斜向杆(B2)、第二斜向杆(B3)、第三斜向杆(B4)、第四斜向杆(B5)的端部分别连接第一滑轮(SL1)、第二滑轮(SL2)、第五滑轮(SL5)、第六滑轮(SL6),竖向杆(B1)的两端分别连接第三滑轮(SL3)和第四滑轮(SL4),第一滑轮(SL1)外侧和第三滑轮(SL3)内侧之间设置第一斜向索(S1),第三滑轮(SL3)内侧与第五滑轮(SL5)外侧之间设置第二斜向索(S2),第五滑轮(SL5)外侧和第六滑轮(SL6)外侧之间设置第二竖向索(S6),第六滑轮(SL6)外侧和第四滑轮(SL4)内侧之间设置第四斜向索(S4),第四滑轮(SL4)内侧和第二滑轮(SL2)外侧之间设置第三斜向索(S3),第二滑轮(SL2)外侧和第一滑轮(SL1)外侧之间设置第一竖向索(S5)。
2.根据权利要求1所述的索杆式伸展臂,其特征是:还包括与第一伸展单元结构相同的第二伸展单元和第三伸展单元,第一伸展单元的第五滑轮(SL5)与第二伸展单元的第一滑轮同在一个滑轮轴上,第一伸展单元的第六滑轮(SL6)与第二伸展单元的第二滑轮同在一个滑轮轴上,第二伸展单元的第五滑轮(SL10)与第三伸展单元的第一滑轮同在一个滑轮轴上,第二伸展单元的第六滑轮(SL9)与第三伸展单元的第二滑轮同在一个滑轮轴上,第一根索成环形,依次绕过第一伸展单元、第二伸展单元和第三伸展单元,具体缠绕方式为:从第一伸展单元的第一滑轮(SL1)外侧开始,依次绕过第一伸展单元第二滑轮(SL2)外侧、第一伸展单元第四滑轮(SL4)内侧、第一伸展单元第六滑轮(SL6)外侧、第二伸展单元第四滑轮(SL7)内侧、第二伸展单元第六滑轮(SL9)外侧、第三伸展单元第四滑轮(SL11)内侧、第三伸展单元第六滑轮(SL13)外侧、第三伸展单元第五滑轮(SL14)外侧、第三伸展单元第三滑轮(SL12)内侧、第二伸展单元第五滑轮(SL10)外侧、第二伸展单元第三滑轮(SL8)内侧、第一伸展单元第五滑轮(SL5)外侧、第一伸展单元第三滑轮(SL3)内侧,最终回到第一伸展单元的第一滑轮(SL1)外侧,第一伸展单元的第五滑轮(SL5)和第六滑轮(SL6)之间设置第二根索,第二伸展单元的第五滑轮(SL10)和第六滑轮(SL9)之间设置第三根索。
说明书
技术领域
本发明涉及的是一种可展结构。
背景技术
可展结构在建筑、航天等多个领域都有需求和应用。例如在航空航天领域,由于结构的大型化和运载火箭有效载荷仓有限容积的矛盾,使得可展结构在此领域得以发展,出现了伸展臂、可展天线、可展太阳能帆板等新型可展结构。
索杆形式的可展结构较单纯杆形式的可展结构,其质量要小。可展结构的展开状态一般为其工作状态。要长期保持展开状态,可展结构大多都是添加锁紧装置或者其他构件实现锁紧;而且,伸展臂在展开或折叠的过程中还需要各构件同步运动,这也要求在铰链连接处增加齿轮或者其他同步装置等,无论是增加锁紧装置或者增加同步装置,这都增加了机构的复杂程度和质量,使机构变得笨重。因此,设计索杆形式的、依靠自身结构锁紧的可展结构,即可降低机构质量,又可以减小机构的复杂程度。
发明内容
本发明的目的在于提供可以在绳索的驱动下展开和折叠的索杆式伸展臂。
本发明的目的是这样实现的:
本发明索杆式伸展臂,其特征是:包括第一伸展单元,第一伸展单元包括竖向杆(B1)、第一斜向杆(B2)、第二斜向杆(B3)、第三斜向杆(B4)、第四斜向杆(B5)、第一滑轮(SL1)、第二滑轮(SL2)、第三滑轮(SL3)、第四滑轮(SL4)、第五滑轮(SL5)、第六滑轮(SL6)、第一转动副(R1)、第二转动副(R2)、第三转动副(R3)、第四转动副(R4),第一斜向杆(B2)、第二斜向杆(B3)、第三斜向杆(B4)、第四斜向杆(B5)分别通过第一转动副(R1)、第二转动副(R2)、第三转动副(R3)、第四转动副(R4)与竖向杆(B1)相连,第一斜向杆(B2)、第二斜向杆(B3)、第三斜向杆(B4)、第四斜向杆(B5)的端部分别连接第一滑轮(SL1)、第二滑轮(SL2)、第五滑轮(SL5)、第六滑轮(SL6),竖向杆(B1)的两端分别连接第三滑轮(SL3)和第四滑轮(SL4),第一滑轮(SL1)外侧和第三滑轮(SL3)内侧之间设置第一斜向索(S1),第三滑轮(SL3)内侧与第五滑轮(SL5)外侧之间设置第二斜向索(S2),第五滑轮(SL5)外侧和第六滑轮(SL6)外侧之间设置第二竖向索(S6),第六滑轮(SL6)外侧和第四滑轮(SL4)内侧之间设置第四斜向索(S4),第四滑轮(SL4)内侧和第二滑轮(SL2)外侧之间设置第三斜向索(S3),第二滑轮(SL2)外侧和第一滑轮(SL1)外侧之间设置第一竖向索(S5)。
本发明还可以包括:
1、还包括与第一伸展单元结构相同的第二伸展单元和第三伸展单元,第一伸展单元的第五滑轮(SL5)与第二伸展单元的第一滑轮同在一个滑轮轴上,第一伸展单元的第六滑轮(SL6)与第二伸展单元的第二滑轮同在一个滑轮轴上,第二伸展单元的第五滑轮(SL10)与第三伸展单元的第一滑轮同在一个滑轮轴上,第二伸展单元的第六滑轮(SL9)与第三伸展单元的第二滑轮同在一个滑轮轴上,第一根索成环形,依次绕过第一伸展单元、第二伸展单元和第三伸展单元,具体缠绕方式为:从第一伸展单元的第一滑轮(SL1)外侧开始,依次绕过第一伸展单元第二滑轮(SL2)外侧、第一伸展单元第四滑轮(SL4)内侧、第一伸展单元第六滑轮(SL6)外侧、第二伸展单元第四滑轮(SL7)内侧、第二伸展单元第六滑轮(SL9)外侧、第三伸展单元第四滑轮(SL11)内侧、第三伸展单元第六滑轮(SL13)外侧、第三伸展单元第五滑轮(SL14)外侧、第三伸展单元第三滑轮(SL12)内侧、第二伸展单元第五滑轮(SL10)外侧、第二伸展单元第三滑轮(SL8)内侧、第一伸展单元第五滑轮(SL5)外侧、第一伸展单元第三滑轮(SL3)内侧,最终回到第一伸展单元的第一滑轮(SL1)外侧,第一伸展单元的第五滑轮(SL5)和第六滑轮(SL6)之间设置第二根索,第二伸展单元的第五滑轮(SL10)和第六滑轮(SL9)之间设置第三根索。
本发明的优势在于:本发明借助于自身结构中连接在节点单元上的索构件只受拉和杆构件只受压的特点,不需要附加任何锁紧装置,即可使节点在任意时刻、任意位置受力平衡,可以实现任意状态下锁紧,使机构更轻便、结构更优化。
附图说明
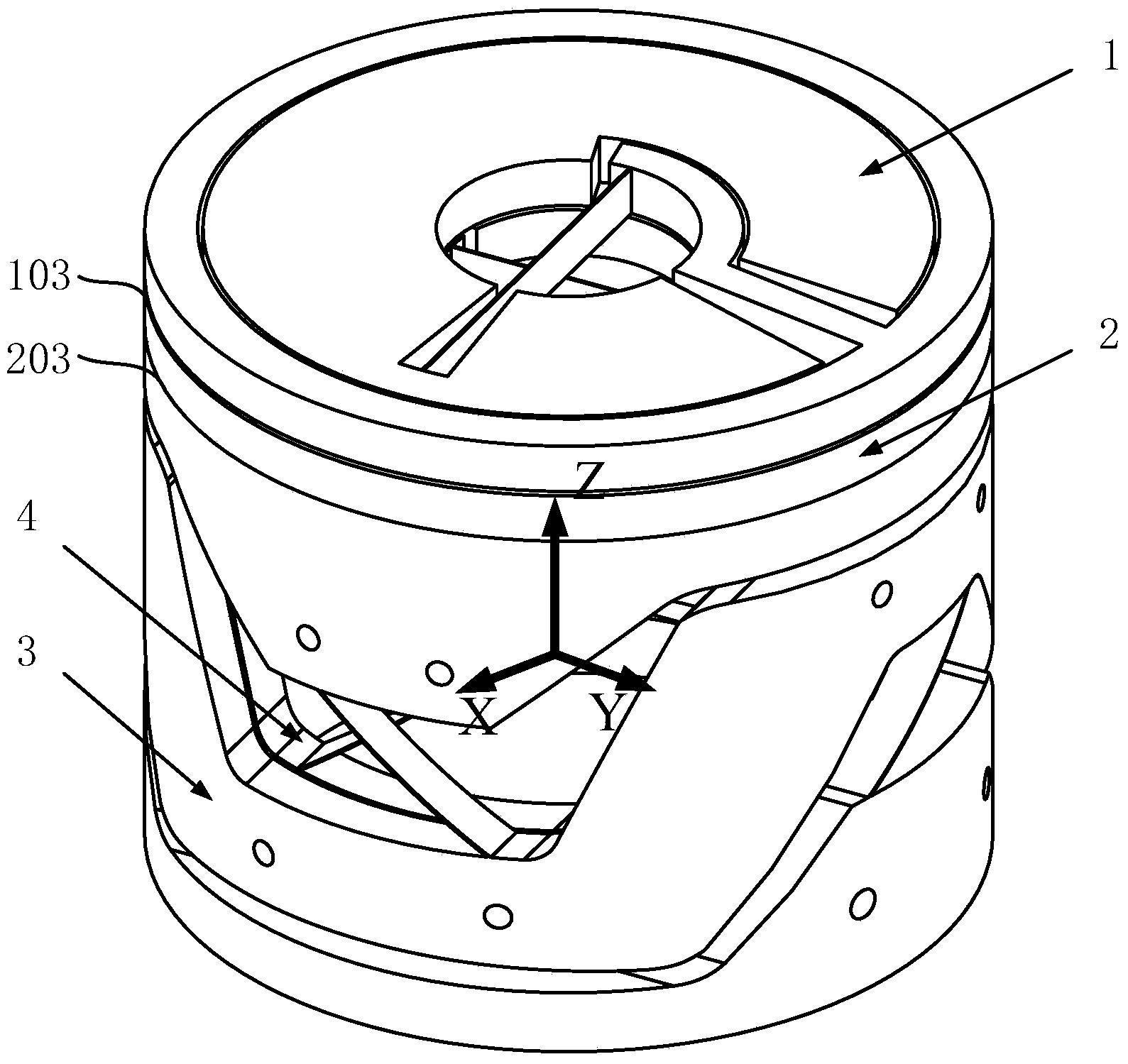
图1为本发明的伸展单元展开状态图;
图2为本发明的伸展单元折叠状态图;
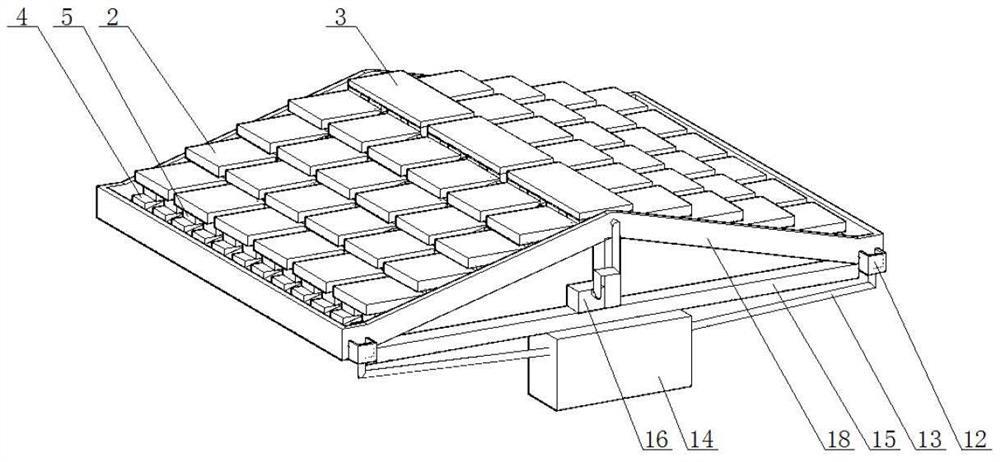
图3为本发明的三个伸展单元在一起的结构图。
具体实施方式
下面结合附图举例对本发明做更详细地描述:
结合图1~3,每个单元包括杆构件、连接件、滑轮和索构件。其中,连接件的形状可看成由一个杆垂直穿过两个平行杆的中心而形成的组件,该连接件的形状并不限于此。杆构件和连接件通过转动副连接,且杆构件的另一端各自连接一个滑轮,连接件上也有两个滑轮;其中所构件通过滑轮导向,并通过控制索构件的长度变化来控制整个伸展臂的展开与折叠运动。而且,此结构是由两个梯形组成的,当索的长度变化时,各杆受力方向处于由竖向索和斜向索组成的梯形角的对角线上,由力学平行四边形法则知,结构受力平衡,其形状就会固定不变,所以,结构的锁紧也是通过索长度的固定来实现的。同时,如果改变索的长度,则该伸展臂可实现展开或收缩。其中杆构件只受压力,索构件只受拉力,由此结构可知,无论该伸展臂展开或收缩到任何时刻、任何位置都是稳定的,这样就避免了安装制动装置的麻烦,使得结构更简单、质量更轻便;同时,该结构各单元杆形成一个“菱形”结构,这样可以保证该伸展臂展开或折叠时,各单元是同步运行的。
图1为索杆式伸展臂的可展单元的展开状态图。该可展单元由6个滑轮、4个杆构件、1个连接件组成和6根索组成。连接件B1可看做由一个杆垂直穿过两个平行的杆组成,其中两个平行的杆的端点为转动副,以图1位置放置,左上角为第一个转动副R1,逆时针方向分别为第二个转动副R2、第三个转动副R4、第四个转动副R3;第一个转动副R1连接第一根杆B2,第二个转动副R2连接第二根杆B3,第三个转动副R4第三根杆B5,第四个转动副R3连接第四根杆B4。第一根杆B2的另一端连接第一个滑轮SL1,第二根杆B3的另一端连接第二个滑轮SL2,第三根杆B5的另一端连接第三个滑轮SL6,第四根杆B4的另一端连接第四个滑轮SL5。以图1位置放置,连接件B1的上端连接第五个滑轮SL3,下断连接第六个滑轮SL4。第一个滑轮SL1与第五个滑轮SL3之间连接的是第一根索S1,第一个滑轮SL1与第二个滑轮SL2之间连接的是第二根索S5,第二个滑轮SL2与第六个滑轮SL4之间连接的是第三根索S3,第三个滑轮SL6与第六个滑轮SL4之间连接的是第四根索S4,第三个滑轮SL6与第四个滑轮SL5之间连接的是第五根索S6,第四个滑轮SL5与第六个滑轮SL3之间连接的是第六根索S2。现在取出三个相同的没有索构件的单元(即:单元只有4个杆构件、1个连接件和6个滑轮),在三个没有索构件的单元中任意取出一个定义为单元3,使得该单元中的第三根杆和第四根杆连接滑轮的一端与机架固定,但单元中的第三个和第四个滑轮是可以转动的;取出剩下的两个单元中的任意一个,定义为单元2,使单元3中的滑轮1与单元2中的滑轮4连接在同一个转动副上,单元3中的滑轮2与单元2中的滑轮3连接在同一个转动副上,各自的转动互不影响;同理,取出剩下的一个单元,定义为单元1,使单元2中的滑轮1与单元1中的滑轮4连接在同一个转动副上,单元2中的滑轮2与单元1中的滑轮3连接在同一个转动副上,且各自的转动互不影响;取出一段索构件,从单元3的第三个滑轮开始连接,逆时针方向依次绕过:单元3的滑轮4、单元3的滑轮5、单元3的滑轮1、单元2的滑轮5、单元2的滑轮1、单元1的滑轮5、单元1的滑轮1、单元1的滑轮2、单元1的滑轮6、单元1的滑轮3、单元2的滑轮6、单元2的滑轮3、单元3的滑轮6并回到单元3的滑轮3,为一根连通的长索,定义为索1,且索构件的长度可以调节,单元2的滑轮3与单元2的滑轮4之间连接一段索,定义为索2,且索的长度可以调节,单元1的滑轮3和单元1的滑轮4之间连接一段索,定义为索3,且索的长度可以调节。若控制三段索的长度变化,则该伸展臂可实现空间的展开和收缩。
索杆式伸展臂专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0