








专利摘要
本发明公开了一种微波探测仪观测月球亮温度数据的处理方法,该方法包括以下步骤:步骤1,对利用微波探测仪绕月观测得到的数据进行预处理后得到脏图;步骤2,利用所述微波探测仪天线的测试数据拟合天线方向图;步骤3,根据所述脏图和天线方向图,利用最大熵算法对脏图进行洁化,得到洁图。本发明的微波探测仪观测月球亮温度数据的处理方法引入了有效的最大熵算法,使得在一定程度上消除了天线方向图的影响,从而获得与月球实际亮温分布更接近的结果。
权利要求
1.一种微波探测仪观测月球亮温度数据的处理方法,该方法包括以下步骤:
步骤1,对利用微波探测仪绕月观测得到的数据进行预处理后得到脏图;
步骤2,利用所述微波探测仪天线的测试数据拟合天线方向图;
步骤3,根据所述脏图和天线方向图,利用最大熵算法对脏图进行洁化,得到洁图。
2.根据权利要求1所述的方法,其特征在于,步骤3进一步包括:
步骤301,读取脏图矩阵y(i,j)和天线方向图矩阵h(i,j),其中y(i,j)是在点(i.j)处的亮温度观测值,h(i,j)是天线增益方向图的矩阵表示;并设定迭代次数N,同时定义变量n=0;
步骤302,建立与脏图大小相等的一个全零矩阵λ(i,j)作为拉格朗日迭代因子的初始值;
步骤303,利用公式
步骤304,将x′(i,j)与天线方向图矩阵h(i,j)卷积得到r(i,j),并取r(i,j)矩阵的大小与x′(i,j)矩阵大小一致;
步骤305,获取scale值,其值为矩阵r(i,j)中所有数值的求和除以矩阵y(i,j)中所有数值的求和;
步骤306,依次定义变量
步骤307,判断n是否达到迭代次数N,如果没有达到迭代次数,返回步骤303;反之,继续步骤308操作;
步骤308,取x(i,j)=x′(i,j)*scale,得到最终的洁图x(i,j),即还原出的真实的亮温分布图。
3.根据权利要求1或2所述的方法,其特征在于,所述微波探测仪绕月观测得到的数据为2C级数据。
4.根据权利要求3所述的方法,其特征在于,所述2C级数据的存储方式为PDS格式,每一文件单独存放一轨数据,包括头文件和数据信息,数据信息包括观测时间、四个通道的观测数值、太阳入射角、太阳方位角、经度、纬度和轨道高度。
5.根据权利要求1或2所述的方法,其特征在于,步骤1中对数据进行预处理包括:数据选取、去除头文件、数据合并、数据剔除和数据拆分,经过对直接观测得到的数据预处理后得到的数据矩阵,称之为脏图矩阵。
6.根据权利要求5所述的方法,其特征在于,数据选取具体为选取微波探测仪绕月观测一个月得到的数据作为待处理数据;数据文件去头是指去除PDS文件里面的头信息,只保留数据信息;数据文件合并是指将一个月的数据文件进行合并为一个文件;数据剔除是指按照约束条件剔除假数据;数据拆分是指将数据拆分为月球白天和月球黑夜。
7.根据权利要求6所述的方法,其特征在于,所述数据拆分进一步包括规定太阳入射角小于90°表示观测时间是月球白天,而大于90°表示观测时间是月球黑夜。
8.根据权利要求7所述的方法,其特征在于,所述约束条件是指选取太阳入射角的范围,太阳方位角的范围和经纬度。
9.根据权利要求1所述的方法,其中步骤2进一步包括:所述测试数据给出了当微波探测仪工作在四个通道时天线的增益方向图,在四个通道分别拟合天线方向图,拟合函数为 其中D是天线的孔径,λ为望远镜工作的频段波长,θ为天线方向图的角度大小。
10.根据权利要求9所述的方法,其特征在于,四个通道分别是3.0,7.8,19.35和37.0GHz。
说明书
技术领域
本发明涉及一种月球亮温度数据处理方法,尤其涉及由探月卫星所搭载的科学有效载荷微波探测仪观测月球亮温度数据的反卷积处理方法。
背景技术
月球是被人们研究得最彻底的天体,同时也是距离地球最近的天体,人类至今第二个亲身到过的天体就是月球。月球的年龄大约有46亿年。地月中心平均距离为384400km;其直径约为3476km,约为地球的1/3.67;质量约为7.350×1025g,约为地球的1/81.301;近心点达到363104km,远心点达到405696km;同时月球的轨道周期约为27.3天。自20世纪50年代人类进入太空开辟太空时代以来,已经多次用人造飞行器对月球进行探测,特别是20世纪60年代以后十多年间,以美、苏为代表的国家花费巨额资金进行月球探测。1969年美国月球人阿姆斯特朗第一次踏上月球,开辟了人类就地探月的先河。进过十几年的宁静后,20世纪90年代以来,以美国提出“重返月球”计划为起点,各国启动了新一轮的探月热潮。
月球遵循辐射机制,利用遥测手段得到的月球表面信息均来自于电磁辐射,电磁辐射领域根据波长的不同可以分为γ射线、X射线、紫外线、可见光、红外线、射电波等领域,在这些领域对月球特性均有研究。对月球进行探测,就要全面的认识月球。无论是哪种手段研究月球,要了解月球物质组成就要对月壤进行研究。月壤是获取月球物质组成信息的重要来源,空间探测器和地基望远镜的观测目标也多是月壤。在射电频段对月球进行探测可以获得月球内部的热分布、热特性,从而得到月壤的物理特性。
亮温度是反映微波辐射的重要指标。如果天体在某一频率的谱辐射度与某一温度TB的绝对黑体在同一频率的辐射强度相等,则该绝对黑体的温度TB称为该物体在该频率的亮温度。研究月壤特性,在微波频段研究亮温度是必不可少的。
目前,月球亮温度的研究主要包括两个方面,一方面是地基射电望远镜的单天线观测,另外一方面是绕月卫星携带的微波探测仪。其中地基射电望远镜对月亮温度观测研究主要有观测整个月球的亮温度平均值或是月面中心点的亮温度值,以及月球亮温度空间分布,分辨率较低。
探月工程“嫦娥一号”绕月卫星所搭载的科学有效载荷微波探测仪是人类第一次在月球轨道上对月球表面进行探测的被动微波遥感器。“嫦娥一号”搭载的微波探测仪多次覆盖全月表面,从而使世界上首次获取看全月微波亮温分布数据,创建了“微波月亮”(The Microwave Moon,简称MicM)。
“嫦娥一号”和“嫦娥二号”搭载的科学有效载荷微波探测仪可以工作在四个通道,频率可以分别在3.0,7.8,19.35和37.0GHz,每个频段的灵敏度为0.5K。“嫦娥一号”绕月卫星的飞行高度为200km,“嫦娥二号”绕月卫星的飞行高度为100km。
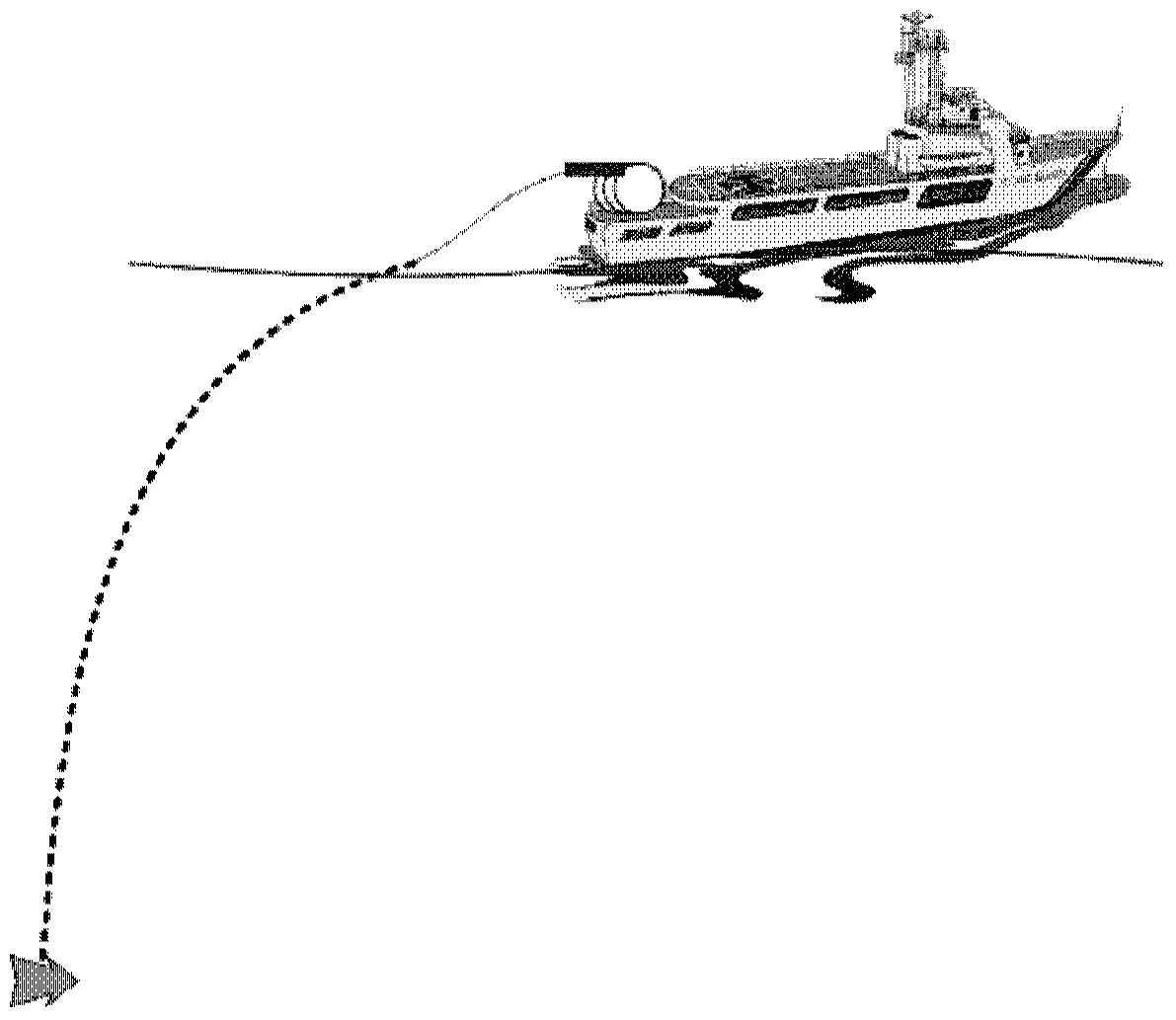
利用微波探测仪对月球进行观测,可以得到观测的射电图像。图1为微波探测仪天线观测月球的原理示意图。x(i,j)为月球的实际亮温度分布,h(i,j)为其中一个频段的天线方向图,y(i,j)为对月球观测得到的天线温度分布。获得的月球亮温度图是月球真实亮温度图与天线方向图的卷积,即:
由此可见,所获得的月球亮温度图并不是真正的月球亮温度的分布。
现有技术对微波探测仪月球亮温度观测数据的处理方法的缺点在于在没有考虑天线方向图的影响,即便考虑天线方向图影响时,采用了线性回归的处理方法,造成所成的月球亮温图像精度低,不能反映月球亮温度的真实变化。所以期望有一种微波探测仪观测月球亮温度数据的处理方法,使得能够获得真实的月球亮温度分布图。
发明内容
为了克服现有技术的上述缺陷,本发明提供了一种卫星搭载的科学有效载荷微波探测仪观测月球亮温度数据的处理方法。
本发明提供的微波探测仪观测月球亮温度数据的处理方法包括步骤:利用微波探测仪绕月观测得到的2C级数据预处理后得到脏图;利用微波探测仪天线的测试数据拟合天线方向图;根据所述脏图和天线方向图,利用最大熵算法对脏图进行洁化,得到洁图。
其中洁化算法进一步包括:步骤301,读取脏图矩阵y(i,j)和天线方向图矩阵h(i,j),其中y(i,j)是在点(i.j)处的亮温度观测值,h(i,j)是天线增益方向图的矩阵表示;并设定迭代次数N,同时定义变量n=0;步骤302,建立与脏图大小相等的一个全零矩阵λ(i,j)作为拉格朗日迭代因子的初始值;步骤303,利用公式 求出x′(i,j);步骤304,将x′(i,j)与天线方向图矩阵h(i,j)卷积得到r(i,j),并取r(i,j)矩阵的大小与x′(i,j)矩阵大小一致;步骤305,获取scale值,其值为矩阵r(i,j)中所有数值的求和除以矩阵y(i,j)中所有数值的求和;步骤306,依次定义变量
应用本发明的微波探测仪观测月球亮温度数据的处理方法,其中引入了有效的最大熵算法,使得在一定程度上消除了天线方向图的影响,从而获得与月球实际亮温分布更接近的结果。
附图说明
图1是现有技术中天线对月球观测的原理示意图;
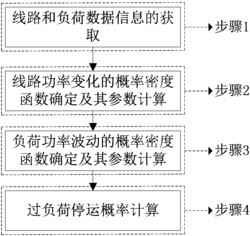
图2是本发明微波探测仪观测月亮温度数据的处理方法的流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清晰易懂,下面结合附图对本发明具体实施方式进行说明。在此本发明的示意性实例用于解释本发明,但不作为对本发明的限定。
图2是本发明微波探测仪观测月亮温度数据的处理方法的流程图。本发明的实现原理是对利用微波探测仪进行观测获得2C级观测数据进行预处理,获得脏图,并拟合天线方向图,利用获得的脏图、天线方向图,通过最大熵算法得到月球的实际亮温分布图。
参照图2,本发明的微波探测仪观测月亮温度数据的处理方法包括脏图获取步骤、天线方向图获取步骤和洁化步骤。
脏图获取步骤进一步包括:
步骤101,获得微波探测仪对月球观测的2C级数据。
2C级观测数据是经过系统校正和几何定位后在网上发布的二级数据,数据的存储格式为行星数据系统(planetary data system,PDS)。每轨数据是微波探测仪从月球的南极到北极、再由北极到南极绕月球飞行一圈对月表的观测结果。为了方便理解微波探测仪对月观测获得的数据格式,下面举例给出2C级数据格式:
表格中各个参数的含义是:Time表示观测扫描数据;T1到T4表示3.0,7.8,19.35和37.0GHz四个通道对应的亮温值;SIncidenceAngle表示该观测点的太阳入射角;SAzimuthAngle表示该观测点的太阳方位角;Longitude表示该观测点的经度;Latitude表示该观测点的纬度;SAltitude表示该观测点的轨道高度。
步骤102,对步骤101获取的观测数据进行预处理。该步骤主要包括五个方面,顺序操作如下,一是数据选取,二是数据文件去头,三是数据文件的整合,四是数据的剔除,剔除明显的假数据,五是将数据拆分,目的在于区分白天还是黑夜。
数据选取:此处选取一个月的数据作为待处理数据,因为一个月恰好约为微波探测仪覆盖一次全月面的时间。
数据文件去头:PDS文件里面除了包含纯粹的数据文件外,还包括头文件等一些描述信息,此处去掉头信息,只保留数据信息。
数据文件合并:将一个月的数据文件进行合并为一个文件。
数据剔除:按照约束条件剔除假数据,约束条件可以选取太阳入射角的范围,太阳方位角的范围和经纬度等。具体方法举例如下:太阳入射角选取范围为0°到180°,太阳方位角选取范围为0°到360°,经度和纬度的选取范围为-90°到90°。
数据拆分:拆分的主要目的是区别月球的白天和黑夜。具体的方法是规定太阳入射角小于90°表示观测时间是月球白天,而大于90°表示观测时间是月球黑夜。
经过对直接观测得到的数据预处理后得到的数据矩阵,称之为脏图矩阵。
继续参照图2,天线方向图的获取步骤包括:
步骤201,通过微波探测仪的测试数据拟合得到天线的方向图。
测试数据给出了当微波探测仪工作在3.0,7.8,19.35和37.0GHz时天线的增益方向图。根据测试给出的增益方向图,确定半功率波束宽度(HPBW)。
半功率波束宽度定义为 其中D是天线的孔径,λ为望远镜工作的频段波长。由天线的半功率波束宽度反推出λ/D,选取天线方向图的拟合公式如下:
其中θ为天线方向图的角度大小。
在得到脏图和天线方向图之后,通过最大熵洁化算法获得洁图,即真实的月球亮温分布图。
在该步骤,采用有效的最大熵算法对脏图进行洁化。利用通过步骤102得到的脏图和步骤201拟合得到的天线方向图,采用最大熵方法进行洁化还原,得到真实亮温值的分布情况。
最大熵算法是就是对图像复原问题加以最大熵约束的恢复方法,在所有满足条件的图像解中,选取熵最大的那组解作为最优解。其数学模型可表示为:
模型中,x(i,j)代表真实亮温度矩阵,即洁图;y(i,j)为观测得到的亮温度矩阵,即脏图;h(i,j)代表天线方向图矩阵,S代表熵值。模型代表的含义是:在求解x(i,j)时,选择使得熵值S最大的那组x(i,j)最为最终的求解结果。
利用拉格朗日乘子法直接求解,得到:
式中:λ11,…,λij为i*j个拉格朗日乘子;Z(λ11,…,λij)为λ11,…,λij的函数,通常称之为配分函数;i*j个拉格朗日乘子λ11,…,λij构成矩阵λ(i,j)。
此处采用直接迭代的方式去求解方程,此处引入势函数G,定义G如等式6所示:
λ11,…,λij=0; (4)
x(i,j)=x′(i,j)*scale; (8)
初始时如等式(4)所示设定λ(i,j)矩阵的初值为0,从而通过等式(2)可以确定x′(i,j),然后代入等式(5),进而得到了一次迭代时scale的取值,代入公式(6)得到G的取值;接着利用新得到的G、scale和原来的脏图矩阵y(i,j)代入等式(7)得到一组新的λ(i,j),同时n自动加1;按照上面的步骤,从而不停的迭代λ(i,j)、x′(i,j)、scale和G。当迭代n到指定次数N,迭代停止,从而确定了最终的x′(i,j),然后利用等式(8)得到x(i,j),即为真实的亮温分布值。
在本发明中,通过最大熵洁化算法对“嫦娥一号”和“嫦娥二号”卫星搭载的微波探测仪观测月球亮温度数据进行处理,有效地去除了天线方向图对月球亮温分布图的影响,从而得到较为理想的月球亮温分布图,进而能够更加客观地研究月表的微波特性等。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
一种微波探测仪观测月球亮温度数据处理方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0