

IPC分类号 : C23C18/36,C23C18/30,C12N11/00,G05B19/04,C12R1/89


专利摘要
本发明公开了一种磁性螺旋形游动微机器人的制备方法及其操控系统,该方法包括:选取与用户所需磁性螺旋形游动微机器人结构参数相同的螺旋藻生物模板、固定强化、胶态钯活化、解胶、化学镀镍、清洗烘干。该系统包括嵌套线圈机构、正负接线柱、容器平台、驱动器、数字量模拟量转换装置、上位机及观测记录装置;嵌套线圈机构由三对亥姆霍兹线圈采用正交嵌套方式组装形成;上位机通过数字量模拟量转换装置、驱动器与正负接线柱连接;容器平台位于嵌套线圈机构的中心;观测记录装置安装在嵌套线圈机构的上方。采用本发明提供的方法及系统能够实现不同结构参数的磁性螺旋形游动微机器人的可控化、批量化制备,实现磁性螺旋形游动微机器人的精准操控。
权利要求
1.一种磁性螺旋形游动微机器人的制备方法,其特征在于,所述磁性螺旋形游动微机器人为三维微螺旋形状结构的微机器人,所述磁性螺旋形游动微机器人包括微螺旋结构的生物有机质内核,以及表面包覆的磁性金属镀层;所述制备方法包括:
步骤一、选取螺旋藻生物模板;
步骤二、固定强化;
将选取的所述螺旋藻生物模板在4℃温度条件下,在浓度为2.5%的戊二醛溶液中浸泡6小时,得到固定强化的螺旋藻细胞;
步骤三、胶态钯活化;
将所述固定强化的螺旋藻细胞在30℃温度条件下,在胶态钯溶液中进行表面活化处理,活化时间为10min,得到胶态钯活化后的螺旋藻细胞;
步骤四、解胶;
将所述胶态钯活化后的螺旋藻细胞在30℃温度条件下,在解胶溶液中进行解胶处理,解胶时间为1min;
步骤五、化学镀镍;
利用化学镀镍溶液,将经过解胶后的螺旋藻细胞进行化学镀镍;
步骤六、对化学镀镍后的螺旋藻细胞进行清洗烘干,得到磁性螺旋形游动微机器人。
2.根据权利要求1所述的制备方法,其特征在于,所述选取螺旋藻生物模板,具体包括:
确定用户所需磁性螺旋形游动微机器人的结构参数;
采用筛分方法,选取与所述用户所需磁性螺旋形游动微机器人结构参数相应的螺旋藻生物模板;所述筛分方法为采用200目-400目的不锈钢筛网进行逐次反复筛分的方法。
3.根据权利要求1所述的制备方法,其特征在于,所述步骤五具体包括:将步骤五中的所述化学镀镍溶液在60℃的温度条件下进行水浴加热,然后将步骤四处理后的螺旋藻细胞加入化学镀镍溶液之中,之后在温度为60℃的持续水浴加热、搅拌速度为200r/min-300r/min的机械搅拌下进行化学镀镍反应,反应时间为5min-15min;
所述化学镀镍溶液的组分为:
4.根据权利要求1所述的制备方法,其特征在于,所述对化学镀镍后的螺旋藻细胞进行清洗烘干,得到磁性螺旋形游动微机器人,具体包括:
采用去离子水对化学镀镍后的螺旋藻细胞进行多次清洗,并在60℃-80℃温度下烘干,得到磁性螺旋形游动微机器人;所述清洗的次数为3-5次。
5.根据权利要求1所述的制备方法,其特征在于,1g所述螺旋藻细胞需要15mL-25mL胶态钯溶液;1g所述螺旋藻细胞需要25mL解胶溶液;1g所述螺旋藻细胞需要50mL-100mL化学镀镍溶液;所述解胶溶液为浓度为30g/L的次亚磷酸钠水溶液。
6.一种磁性螺旋形游动微机器人的操控系统,其特征在于,所述操控系统包括:线圈部、容器平台、三个驱动器、三个直流电源、数字量模拟量转换装置、上位机以及观测记录装置;所述线圈部包括支撑台、设置在所述支撑台上的嵌套线圈机构以及集成在所述支撑台的台面上的三对正负接线柱;所述嵌套线圈机构为三对亥姆霍兹线圈采用正交嵌套方式组装形成的三维线圈机构,每对所述亥姆霍兹线圈均由两个完全相同的线圈采用同轴平行布置方式组装形成;每对所述亥姆霍兹线圈均引出一对所述正负接线柱;
所述上位机通过所述数字量模拟量转换装置分别与三个所述驱动器的模拟信号输入端电连接;三个所述直流电源分别与三个所述驱动器相连,为所述驱动器提供电源输入;三个所述驱动器的电流输出端分别通过双芯屏蔽线与三对所述正负接线柱电连接;所述容器平台,位于所述嵌套线圈机构的中心,用于盛放磁性螺旋形游动微机器人的溶液;所述观测记录装置竖直安装在所述嵌套线圈机构的正上方,且所述观测记录装置中的光学镜头对准所述容器平台。
7.根据权利要求6所述的操控系统,其特征在于,每对所述亥姆霍兹线圈的尺寸不同;所述嵌套线圈机构由三对所述亥姆霍兹线圈按照尺寸从小到大采用正交嵌套的方式组装形成的;从内到外,所述嵌套线圈机构中的三对所述亥姆霍兹线圈的轴向分别对应三维可控旋转磁场的Z、X、Y轴,且三对所述亥姆霍兹线圈的轴相交于所述嵌套线圈机构的中心点。
8.根据权利要求6所述的操控系统,其特征在于,所述数字量模拟量转换装置包括USB型转换板卡和外接端子板,所述USB型转换板卡的USB接口与所述上位机电连接,所述USB型转换板卡的三路模拟信号输出端,采用屏蔽信号线,通过所述外接端子板与对应的所述驱动器的模拟信号输入端相连接,为对应的所述驱动器输出的电流提供相应的电压控制信号。
9.根据权利要求6所述的操控系统,其特征在于,所述观测记录装置包括万向支架、调焦机构、CCD相机、光学镜头;所述CCD相机与所述光学镜头相连接,所述CCD相机和所述光学镜头通过所述万向支架上的悬臂支撑,竖直安装在所述嵌套线圈机构的正上方,通过所述调焦机构调节所述万向支架上悬臂的高度以进行所述光学镜头调焦。
说明书
技术领域
本发明涉及微纳机器人制造及其驱动技术领域,特别涉及一种磁性螺旋形游动微机器人的制备方法及其操控系统。
背景技术
伴随微纳米科学技术的发展,微纳机器人得到了广泛关注,尤其是在生物医药和微系统方面具有非常重要的潜在应用。受大肠杆菌等微生物通过鞭毛旋转产生推进运动的启发,磁性螺旋形游动微机器人作为一种磁控微机器人受到研究者普遍关注。在外加旋转磁场作用下,磁性螺旋形游动微机器人的特殊螺旋形结构可产生轴向推进力,在低雷诺数液体环境中实现高效可控的运动,从而完成微小尺度的任务要求。在微纳尺度精准操控、靶向药物运输等前沿领域具有重要的研究价值。
传统的机械加工方法难以实现微米尺度三维微螺旋结构的批量制造,而新兴的三维激光直写技术等微纳加工方法也存在制造成本高、制造效率低等不足,限制了磁性螺旋形游动微机器人的发展应用。此外,包括磁性螺旋形游动微机器人在内的所有磁性微机器人,都要求具有对其实现简单便捷运动操控的三维可控旋转磁场,且三维可控旋转磁场是实现对该类微机器人精准操控的一种必要手段,而现有三维可控旋转磁场多存在结构庞大、控制复杂、集成度不高等问题,不便于操控微米尺度的磁性微机器人。
发明内容
针对上述问题,本发明的目的是提供一种磁性螺旋形游动微机器人的制备方法及其操控系统。
为实现上述目的,本发明提供了如下方案:
一种磁性螺旋形游动微机器人的制备方法,所述磁性螺旋形游动微机器人为三维微螺旋形状结构的微机器人,所述磁性螺旋形游动微机器人包括微螺旋结构的生物有机质内核,以及表面包覆的磁性金属镀层;所述制备方法包括:
步骤一、选取螺旋藻生物模板;
步骤二、固定强化;
将选取的所述螺旋藻生物模板在4℃温度条件下,在浓度为2.5%的戊二醛溶液中浸泡6小时,得到固定强化的螺旋藻细胞;
步骤三、胶态钯活化;
将所述固定强化的螺旋藻细胞在30℃温度条件下,在胶态钯溶液中进行表面活化处理,活化时间为10min,得到胶态钯活化后的螺旋藻细胞;
步骤四、解胶;
将所述胶态钯活化后的螺旋藻细胞在30℃温度条件下,在解胶溶液中进行解胶处理,解胶时间为1min;
步骤五、化学镀镍;
利用化学镀镍溶液,将经过解胶后的螺旋藻细胞进行化学镀镍;
步骤六、对化学镀镍后的螺旋藻细胞进行清洗烘干,得到磁性螺旋形游动微机器人。
可选的,所述选取螺旋藻生物模板,具体包括:
确定用户所需磁性螺旋形游动微机器人的结构参数;
采用筛分方法,选取与所述用户所需磁性螺旋形游动微机器人结构参数相应的螺旋藻生物模板;所述筛分方法为采用200目-400目的不锈钢筛网进行逐次反复筛分的方法。
可选的,所述步骤五具体包括:将步骤五中的所述化学镀镍溶液在60℃的温度条件下进行水浴加热,然后将步骤四处理后的螺旋藻细胞加入化学镀镍溶液之中,之后在温度为60℃的持续水浴加热、搅拌速度为200r/min-300r/min的机械搅拌下进行化学镀镍反应,反应时间为5min-15min;
所述化学镀镍溶液的组分为:
可选的,所述对化学镀镍后的螺旋藻细胞进行清洗烘干,得到磁性螺旋形游动微机器人,具体包括:
采用去离子水对化学镀镍后的螺旋藻细胞进行多次清洗,并在60℃-80℃温度下烘干,得到磁性螺旋形游动微机器人;所述清洗的次数为3-5次。
可选的,1g所述螺旋藻细胞需要15mL-25mL胶态钯溶液;1g所述螺旋藻细胞需要25mL解胶溶液;1g所述螺旋藻细胞需要50mL-100mL化学镀镍溶液;所述解胶溶液为浓度为30g/L的次亚磷酸钠水溶液。
本发明提供了一种磁性螺旋形游动微机器人的制备方法,该制备方法包括:选取螺旋藻生物模板、固定强化、胶态钯活化、解胶、化学镀镍、清洗烘干;螺旋藻生物模板的结构参数与用户所需磁性螺旋形游动微机器人的结构参数相同。因此,通过上述六个步骤就能得到用户所需磁性螺旋形游动微机器人,其制造工艺简单,能够实现不同结构参数的磁性螺旋形游动微机器人的可控化、批量化制备。
本发明还提供了一种磁性螺旋形游动微机器人的操控系统,所述操控系统包括:线圈部、容器平台、三个驱动器、三个直流电源、数字量模拟量转换装置、上位机以及观测记录装置;所述线圈部包括支撑台、设置在所述支撑台上的嵌套线圈机构以及集成在所述支撑台的台面上的三对正负接线柱;所述嵌套线圈机构为三对亥姆霍兹线圈采用正交嵌套方式组装形成的三维线圈机构,每对所述亥姆霍兹线圈均由两个完全相同的线圈采用同轴平行布置方式组装形成;每对所述亥姆霍兹线圈均引出一对所述正负接线柱;
所述上位机通过所述数字量模拟量转换装置分别与三个所述驱动器的模拟信号输入端电连接;三个所述直流电源分别与三个所述驱动器相连,为所述驱动器提供电源输入;三个所述驱动器的电流输出端分别通过双芯屏蔽线与三对所述正负接线柱电连接;所述容器平台,位于所述嵌套线圈机构的中心,用于盛放磁性螺旋形游动微机器人的溶液;所述观测记录装置竖直安装在所述嵌套线圈机构的正上方,且所述观测记录装置中的光学镜头对准所述容器平台。
可选的,每对所述亥姆霍兹线圈的尺寸不同;所述嵌套线圈机构由三对所述亥姆霍兹线圈按照尺寸从小到大采用正交嵌套的方式组装形成的;从内到外,所述嵌套线圈机构中的三对所述亥姆霍兹线圈的轴向分别对应三维可控旋转磁场的Z、X、Y轴,且三对所述亥姆霍兹线圈的轴相交于所述嵌套线圈机构的中心点。
可选的,所述数字量模拟量转换装置包括USB型转换板卡和外接端子板,所述USB型转换板卡的USB接口与所述上位机电连接,所述USB型转换板卡的三路模拟信号输出端,采用屏蔽信号线,通过所述外接端子板与对应的所述驱动器的模拟信号输入端相连接,为对应的所述驱动器输出的电流提供相应的电压控制信号。
可选的,所述观测记录装置包括万向支架、调焦机构、CCD相机、光学镜头;所述CCD相机与所述光学镜头相连接,所述CCD相机和所述光学镜头通过所述万向支架上的悬臂支撑,竖直安装在所述嵌套线圈机构的正上方,通过所述调焦机构调节所述万向支架上悬臂的高度以进行所述光学镜头调焦。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明提供了一种磁性螺旋形游动微机器人的操控系统,该操控系统包括:线圈部、容器平台、三个驱动器、三个直流电源、数字量模拟量转换装置、上位机以及观测记录装置;所述线圈部包括支撑台、设置在所述支撑台上的嵌套线圈机构以及集成在所述支撑台的台面上的三对正负接线柱;所述嵌套线圈机构为三对亥姆霍兹线圈采用正交嵌套方式组装形成的三维线圈机构,每对所述亥姆霍兹线圈均由两个完全相同的线圈采用同轴平行布置方式组装形成;每对所述亥姆霍兹线圈均引出一对所述正负接线柱;所述上位机通过所述数字量模拟量转换装置与每个所述驱动器的模拟信号输入端电连接;所述直流电源的输出端与所述驱动器的电流输入端电连接;所述驱动器的电流输出端通过双芯屏蔽线与所述正负接线柱电连接;所述容器平台,位于所述嵌套线圈机构的中心,用于盛放磁性螺旋形游动微机器人的溶液;所述观测记录装置竖直安装在所述嵌套线圈机构的正上方,且所述观测记录装置中的光学镜头对准所述容器平台。因此,本发明提供的操控系统结构简单紧凑,集成度高,操作便捷灵活,能够实现磁性螺旋形游动微机器人的精准操控。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例磁性螺旋形游动微机器人制备方法的流程示意图;
图2为本发明实施例磁性螺旋形游动微机器人的SEM照片;
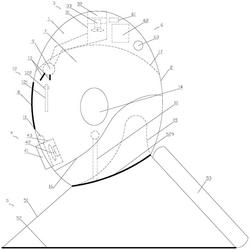
图3为本发明实施例磁性螺旋形游动微机器人的结构示意图;
图4为本发明实施例磁性螺旋形游动微机器人的操控原理示意图;
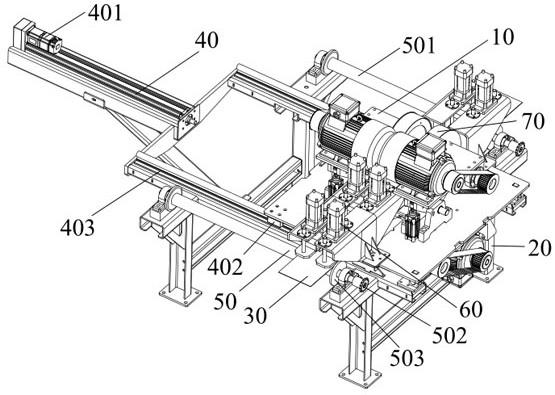
图5为本发明实施例磁性螺旋形游动微机器人操控系统的结构示意图;
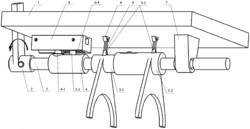
图6为本发明实施例磁性螺旋形游动微机器人操控系统的工作过程示意图;
图7为本发明实施例磁性螺旋形游动微机器人的操控效果照片;
图8为同一磁性螺旋形游动微机器人在不同强度和频率参数的旋转磁场中推进速度测试曲线;
图9为不同结构参数的磁性螺旋形游动微机器人在30Gs强度和不同频率参数的旋转磁场中推进速度测试曲线。
文中单位说明如下:
h小时 min分钟 ℃摄氏度 g克 μm微米 mL毫升
mL/L毫升/升 g/L克/升 μm/s微米/秒 mT毫特 Gs高斯
Hz赫兹 r/min转/分钟
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种磁性螺旋形游动微机器人的制备方法及其操控系统,其制备工艺简单,能够实现不同结构参数的磁性螺旋形游动微机器人的可控化、批量化制备,且操控系统结构简单紧凑,集成度高,操作便捷灵活,能够实现磁性螺旋形游动微机器人的精准操控。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
本发明提出一种基于生物模板和化学镀工艺制备磁性螺旋形游动微机器人的方法,以及一种基于亥姆霍兹线圈来产生三维可控旋转磁场,驱动磁性螺旋形游动微机器人推进运动的操控系统。
图1为本发明实施例磁性螺旋形游动微机器人制备方法的流程示意图。
如图1所示,本发明实施例提供的制备方法包括以下步骤:
步骤101:选取螺旋藻生物模板。
通过筛分等方法选取具有特定形状结构参数的螺旋藻生物模板,以得到相应结构参数的磁性螺旋形游动微机器人,以满足不同的研究应用需求。具体包括:
确定用户所需磁性螺旋形游动微机器人的结构参数。
采用筛分方法,选取与所述用户所需磁性螺旋形游动微机器人结构参数相应的螺旋藻生物模板;所述筛分方法为采用200目-400目的不锈钢筛网进行逐次反复筛分的方法。
步骤102:固定强化。
将选取的所述螺旋藻生物模板在4℃温度条件下,在浓度为2.5%的戊二醛溶液中浸泡6小时,得到固定强化的螺旋藻细胞,实现三维微螺旋结构的固定强化。
步骤103:胶态钯活化。
将所述固定强化的螺旋藻细胞在30℃温度条件下,在胶态钯溶液中进行表面活化处理,活化时间为10min,得到胶态钯活化后的螺旋藻细胞。1g螺旋藻细胞大致需要使用15mL-25mL胶态钯溶液。
所述胶态钯溶液为A溶液与B溶液混合配制得到的溶液;所述胶态钯溶液的颜色为棕褐色;所述胶态钯溶液在60℃-65℃水浴加热的条件下保温3h-5h,并用去离子水稀释至1000mL备用。
所述胶态钯溶液的配制方法为:首先在室温条件下配制所述B溶液,然后在30℃条件下配制所述A溶液,最后将所述B溶液在不断搅拌的情况下缓慢加入到所述A溶液中,并混合均匀,得到所述胶态钯溶液;其中,
A溶液氯化亚锡(SnCl2·2H2O)2.53g/L
氯化钯(PdCl2) 1g/L
浓盐酸(HCl) 100mL
去离子水200mL
B溶液锡酸钠(Na2SnO3·3H2O) 7g/L
氯化亚锡(SnCl2·2H2O)75g/L
浓盐酸(HCl) 200mL。
步骤104:解胶。
将所述胶态钯活化后的螺旋藻细胞在30℃温度条件下,在解胶溶液中进行解胶处理,解胶时间为1min。1g螺旋藻细胞大致需要使用25mL解胶溶液。
所述解胶溶液为浓度为30g/L的次亚磷酸钠水溶液。
步骤105:化学镀镍。
利用化学镀镍溶液,将经过解胶后的螺旋藻细胞进行化学镀镍,实现表面磁性化修饰。1g螺旋藻细胞需50ml-100ml化学镀镍溶液。
所述化学镀镍溶液的组分为:
步骤105具体包括:将配置好的化学镀镍溶液在60℃的温度条件下进行水浴加热,将步骤104处理后的螺旋藻细胞加入化学镀镍溶液之中,之后在温度为60℃的持续水浴加热、搅拌速度为200r/min-300r/min的机械搅拌下进行化学镀镍反应,反应时间为5min-15min,从而可以对螺旋藻生物模板进行表面磁性化修饰。表面镀层主要材质为镍,镀层均匀致密,镀层厚度可通过反应时间进行控制。
步骤106:清洗烘干。
采用去离子水对化学镀镍后的螺旋藻细胞进行多次清洗,并在60℃-80℃温度下烘干,得到磁性螺旋形游动微机器人;所述清洗的次数为3-5次。制备得到的磁性螺旋形游动微机器人的SEM照片如附图2所示。
图3为本发明磁性螺旋形游动微机器人的结构示意图,本发明实施例制备的磁性螺旋形游动微机器人主要通过化学镀镍工艺,在螺旋藻生物模板表面进行磁性金属修饰得到。如图3所示,所述磁性螺旋形游动微机器人为三维微螺旋形状结构的微机器人,所述磁性螺旋形游动微机器人包括微螺旋结构的生物有机质内核201,以及表面包覆的磁性金属镀层202。
为实现上述磁性螺旋形游动微机器人的运动操控,本发明提供了具有三维可控旋转磁场发生装置的操控系统。
图4为本发明磁性螺旋形游动微机器人的操控原理示意图,如图4所示,在外加适当参数的旋转磁场作用下,磁性螺旋形游动微机器人可保持螺旋结构轴线与磁场旋转平面垂直,并在旋转磁场的作用下绕着螺旋结构的轴线旋转,通过与流体的相互作用,产生推进运动。磁性螺旋形游动微机器人的推进速度大小与旋转磁场的参数(磁场强度、磁场旋转频率等)有关,推进方向与磁场旋转方向有关。在适当范围内改变旋转磁场参数,可实现对磁性螺旋形游动微机器人的精准运动操控。
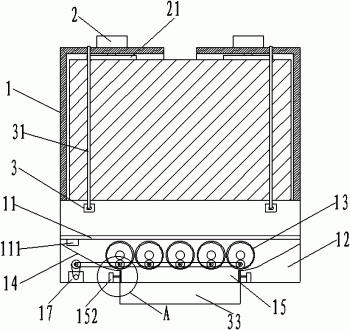
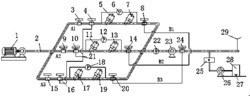
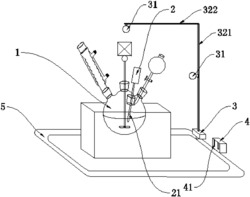
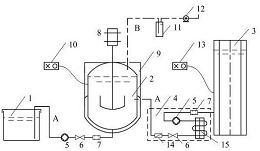
图5为本发明实施例磁性螺旋形游动微机器人操控系统的结构示意图。
如图5所示,本发明实施例提供的磁性螺旋形游动微机器人操控系统包括线圈部、容器平台、三个驱动器1、三个直流电源2、数字量模拟量转换装置、上位机3以及观测记录装置。所述线圈部包括支撑台4、设置在所述支撑台4上的嵌套线圈机构以及集成在所述支撑台4的台面上的三对正负接线柱5。所述上位机3通过所述数字量模拟量转换装置分别与三个所述驱动器1的模拟信号输入端电连接;三个直流电源2的输出端分别与三个所述驱动器1的电流输入端电连接;三个所述驱动器1的电流输出端分别通过双芯屏蔽线与三对所述正负接线柱5电连接;所述观测记录装置竖直安装在所述嵌套线圈机构的正上方,且所述观测记录装置中的光学镜头12对准所述容器平台。
其中,所述嵌套线圈机构共包括三对亥姆霍兹线圈6;所述嵌套线圈机构为三对亥姆霍兹线圈6采用正交嵌套方式组装形成的三维线圈机构。每对所述亥姆霍兹线圈6由为两个完全相同的线圈采用同轴平行布置方式组装形成。每个线圈均通过漆包铜线在电木骨架上绕制形成,每对亥姆霍兹线圈6中的两个完全相同的线圈通过接线串联,并通过同向电流,每对亥姆霍兹线圈6引出一对正负接线柱5,集成在支撑台4的台面上,以便于电流输入。每对所述亥姆霍兹线圈6的尺寸不同,所以所述嵌套线圈机构由三对所述亥姆霍兹线圈6按照尺寸从小到大采用正交嵌套的方式组装形成的;从内到外,所述嵌套线圈机构中的三对所述亥姆霍兹线圈6的轴向分别对应三维可控旋转磁场的Z、X、Y轴,且三对所述亥姆霍兹线圈6的轴相交于所述嵌套线圈机构的中心点。通过亥姆霍兹线圈在空间结构以及线圈绕制等方面的计算优化,使得内部指定空间区域磁场均匀度达到最佳。
在嵌套线圈机构的中心区域放置容器平台,用于装载含有磁性螺旋形游动微机器人的溶液。
三个驱动器1均采用电机驱动中广泛应用的模拟量伺服驱动器,其电流输出端分别通过正负接线柱5与三对亥姆霍兹线圈6相连,分别为三对亥姆霍兹线圈6提供相应的电流输入。
三个直流电源2均为直流稳压电源;三个直流电源2分别与三个驱动器1相连,为驱动器1提供电源输入。
数字量模拟量转换装置包括USB型转换板卡7和外接端子板8,USB型转换板卡7的USB接口与上位机3相连,USB型转换板卡7的输出端口与外接端子板8连接以方便接线和管理。USB型转换板卡7的三路模拟信号输出端,采用屏蔽信号线,通过外接端子板8,与对应的驱动器1的模拟信号输入端相连接,为对应的驱动器1输出电流提供相应的电压控制信号。
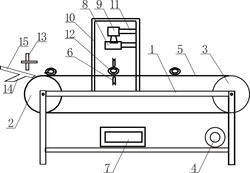
观测记录装置包括万向支架9、调焦机构10、CCD相机11、光学镜头12。CCD相机11与光学镜头12相连接,CCD相机11与光学镜头12均通过万向支架9上的悬臂支撑,竖直安装在嵌套线圈机构的正上方,通过调焦机构10调节万向支架9上的悬臂的高度从而对光学镜头12进行调焦,实现实时观测记录。
由于实际制造误差的存在,需要对每对亥姆霍兹线圈6进行标定,以确定输入电压信号大小与亥姆霍兹线圈中电流大小方向,对应磁场强度方向的关系,通过线性拟合得到对应关系式,作为上位机3内软件程序中进行参数换算的依据。
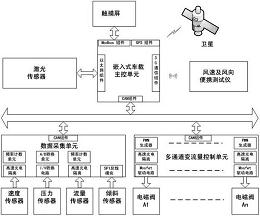
图6为本发明磁性螺旋形游动微机器人操控系统的工作过程示意图,如图6所示,本发明所述磁性螺旋形游动微机器人的操控系统工作过程如下,上位机3通过C#语言编写的软件程序,根据用户设定的三维磁场参数,以及标定得到的对应关系式,计算得到XYZ三对亥姆霍兹线圈6所需的电流参数,然后计算得到XYZ三对亥姆霍兹线圈6所需的电压信号。将对应的电压波形发送给USB型转换板卡7,USB型转换板卡7按照此波形,分别将三路电压信号输入到对应的三个驱动器1中,三个驱动器1按照对应的波形将电流分别输出到三对亥姆霍兹线圈6中,从而在正交空间区域内产生满足参数要求的三维可控旋转磁场,实现磁性螺旋形游动微机器人的相应操控。
本发明实施例提供的操控系统产生的三维可控旋转磁场强度可以达到10mT,频率在0-100Hz内可控调节,三维可控旋转磁场的旋转轴向可根据需求实现三维空间任意指向。通过上位机3内的软件程序计算,在适当范围内改变磁场参数,使操控系统产生满足相应要求的三维可控旋转磁场,从而实现对磁性螺旋形游动微机器人的精准运动操控。通过改变磁场强度和旋转频率,从而改变磁性螺旋形游动微机器人的推进速度大小。通过改变磁场旋转轴向,从而改变磁性螺旋形游动微机器人的推进速度的方向。
图7为本发明磁性螺旋形游动微机器人的操控效果照片。
如图7所示,时刻分别为第0s、2s、3s、6s。通过本发明实施例提供的操控系统的控制,实现对磁性螺旋形游动微机器人的运动操控,使其以所需速度沿指定轨迹运动,完成微小尺度的任务要求。
图8为同一磁性螺旋形游动微机器人在不同强度和频率参数的旋转磁场中推进速度测试曲线。
如图8所示,本发明磁性螺旋形游动微机器人在不同强度和频率的旋转磁场中的推进速度不同,微机器人对象(HM-1,螺数为1.5,长度为105μm,螺旋宽度为30μm)在20Gs,30Gs,40Gs和70Gs强度下,推进速度随三维可控旋转磁场频率变化的曲线。
图9为不同结构参数的磁性螺旋形游动微机器人在30Gs强度和不同频率参数的旋转磁场中推进速度测试曲线。
采用结构参数不同的螺旋藻生物模板,可制备得到相应结构参数的磁性螺旋形游动微机器人,其在三维可控旋转磁场中的推进速度也有所不同。如图9所示,分别是三种结构参数的磁性螺旋形游动微机器人在30Gs强度的旋转磁场中,其推进速度随三维可控旋转磁场频率变化的关系曲线(HM-2,螺数为2,长度为154μm,螺旋宽度为42μm;HM-3,螺数为2.5,长度为270μm,螺旋宽度为37μm;HM-4,螺数为4,长度为216μm,螺旋宽度为28μm)。
本发明所述的一种磁性螺旋形游动微机器人,在外加适当参数的三维可控旋转磁场作用下,磁性螺旋形游动微机器人能够保持螺旋结构轴线与磁场旋转平面垂直,并在三维可控旋转磁场的作用下绕着螺旋结构的轴线旋转,通过与流体的相互作用,产生推进运动。磁性螺旋形游动微机器人的推进速度大小与三维可控旋转磁场的参数(磁场强度、磁场旋转频率等)有关,推进速度的方向与三维可控旋转磁场旋转方向有关。在适当范围内改变三维可控旋转磁场参数,实现对磁性螺旋形游动微机器人的精准运动操控。采用不同结构参数的螺旋藻生物模板制备得到不同的磁性螺旋形游动微机器人,其在三维可控旋转磁场中的推进速度也有所区别。
与现有技术相比,本发明的有益效果为:
(1)本发明所述的磁性螺旋形游动微机器人,仿照大肠杆菌等微生物通过鞭毛旋转产生推进的运动方式,在三维可控旋转磁场控制下能够在低雷诺数环境中进行有效推进运动。
(2)本发明所述的制备方法,采用具有天然微螺旋结构的螺旋藻细胞作为模板,采用优化的化学镀工艺进行表面磁性化修饰,表面镀层均匀致密,形状结构保持良好,制造工艺简单,能够实现不同结构参数的磁性螺旋形游动微机器人的可控化、批量化制备。
(3)本发明所述的操控系统,基于三维亥姆霍兹线圈,通过上位机的软件程序控制,采用数字量模拟量转换装置和驱动器进行电流输出,产生三维可控旋转磁场,整个操控系统结构简单紧凑,集成度高,操作便捷灵活,能够实现磁性螺旋形游动微机器人的精准操控。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
一种磁性螺旋形游动微机器人的制备方法及其操控系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0