






专利摘要
本发明涉及一种海洋渔获物船载加工设备海浪补偿系统。本发明主要由数字油缸、下绞支、上绞支、工作平台、绝对值倾角传感器、基座、六轴姿态传感器组成。其中工作平台和基座之间通过下绞支,上绞支用三根数字油缸连接在一起;检测补偿系统位置变化用的绝对值倾角传感器、六轴姿态传感器安装在基座上;数字油缸通过液压供油系统提供液压油,平台控制系统控制整个补偿系统的运行。数字油缸主要由活塞杆、油缸缸筒、滚珠丝杆、丝杆阀芯联轴器、阀套、阀芯、阀套定位块、阀芯电机联轴器和驱动电机组成。本发明可实现沿垂直轴的移动和分别绕两根正交的水平轴转动,满足对水产品加工船上水产加工设备的横摇、纵摇和升沉运动三个自由度的补偿。
权利要求
1.海洋渔获物船载加工设备海浪补偿系统,主要由数字油缸、下绞支、上绞支、工作平台、液压供油系统、绝对值倾角传感器、平台控制系统、基座、六轴姿态传感器组成;
其中工作平台和基座之间通过下绞支,上绞支用三根数字油缸连接在一起;检测补偿系统位置变化用的绝对值倾角传感器、六轴姿态传感器安装在基座上;数字油缸通过液压供油系统提供液压油,平台控制系统控制整个补偿系统的运行,其特征在于:
所述的数字油缸主要由活塞杆、油缸缸筒、滚珠丝杆、丝杆阀芯联轴器、阀套、阀芯、阀套定位块、阀芯电机联轴器和驱动电机组成;
所述的数字油缸中的滚珠丝杆的螺母部分安装在中空的活塞杆处,阀套通过阀套定位块安装在油缸缸筒的尾端,其中阀芯和滚珠丝杆通过丝杆阀芯联轴器连接,驱动电机安装在联轴器罩上,驱动电机与阀芯通过阀芯电机联轴器连接;
所述的数字油缸由三通阀控制差动油缸动作;数字油缸的有杆腔和无杆腔常通高压液压油,在数字油缸的无杆腔端部有内置的三通阀,通过三通阀的阀口开闭动作控制数字油缸的伸出或缩回动作;
所述的阀芯电机联轴器为铍青铜片作为弹簧片的联轴器,阀芯电机联轴器用于传递驱动电机的扭矩,带动阀芯旋转,进而带动滚珠丝杆转动;还用于有效地补偿阀芯运动时的轴向位移,使驱动电机转动时,阀口可以灵敏的打开;在驱动电机停止转动时,阀口通过铍青铜弹簧片的弹性瞬间关闭;
所述的阀套设计有使阀芯受力平衡的油路,阀芯受向右的液压力受力面积S1和向左的液压力受力面积S2相等,阀芯受到的向左的液压力和向右的液压力完全相等,阀芯始终受力平衡;
所述的阀芯电机联轴器由驱动电机侧安装端、铍青铜弹簧片和阀芯侧安装端组成,驱动电机侧安装端周向设置弹簧片安装耳,阀芯侧安装端周向对应设置弹簧片安装耳,驱动电机侧安装端的弹簧片安装耳与对应的阀芯侧安装端的弹簧片安装耳之间通过环形铍青铜弹簧片连接;
所述的阀芯上设置有凸起台阶,凸起台阶的左侧通过阀套上的平衡油路通回油口,凸起台阶的右侧通过阀芯上小通油孔与压力腔相连。
说明书
技术领域
本发明属于水产品加工设备领域,具体涉及一种船载水产品加工设备风 浪补偿系统用的数字油缸。
背景技术
为了给国内外市场和消费者提供更多优质水产品的良好愿望,很多水产 加工企业开始建造海上水产品加工母船,作为移动的海上水产品加工车间, 加工船拥有强大的续航能力、先进的加工生产线、容量巨大的移动冷库、一 流的海水谈化设备和高效的除湿设备,提高了宝贵水产品资源的利用率,提 升了产品的质量安全,保障了渔民的安全生产,实现了渔民的增效增收。
漂浮在海上的船舶会随着波浪一起做升沉、横荡、纵荡、艏摇、横摇和 纵摇六个自由度运动,这些运动会对船舶上安装在工作平面上的设备产生影 响,由于船舶的横摇、纵摇和升沉运动都会使的工作设备各个零部件沿着重 力方向有位移,这三个运动对工作设备的影响最大。因此设计一个机械装置 补偿这三者的叠加运动就很有意义。
传统的主动式三自由度风浪补偿平台通常采用电动推杆、伺服油缸等作 为动作执行器,根据船舶摇摆姿态,实时进行补偿,以减小设备摇摆。如专 利CN 105253264 A,曾提出一种深水半潜式钻井平台的海浪补偿装置及其控 制方法。但是,无论电动推杆还是伺服油缸构成的补偿平台都存在一定弊端。 如电动推杆由于驱动电机需要单独安装,占用设备底部空间大,且由于功率 限制,补偿速度有限,且结构复杂;伺服油缸虽然可以节省布置空间,但是 价格昂贵,对油液污染度要求高,并不适用于船载设备环境。本发明提出一 种基于数字油缸的三自由度风浪补偿平台,数字油缸功率密度比高,结构简 单,成本低,且对油液污染度不敏感,可以很好的解决以上问题。
发明内容
本发明是一种采用数字液压缸为位移补偿的三自由度的并联平台,可实 现沿垂直轴的移动和分别绕两根正交的水平轴转动,满足对水产品加工船上 水产加工设备的横摇、纵摇和升沉运动三个自由度的补偿,降低安装在平台 上的水产加工设备由于波浪影响而产生的晃动,使各类的水产加工工设备可 以平稳的运行。
本发明的技术方案为:
本发明主要由数字油缸、下绞支、上绞支、工作平台、液压供油系统、 绝对值倾角传感器、平台控制系统、基座、六轴姿态传感器组成。
其中工作平台和基座之间通过下绞支,上绞支用三根数字油缸连接在一 起;检测补偿系统位置变化用的绝对值倾角传感器、六轴姿态传感器安装在 基座上;数字油缸通过液压供油系统提供液压油,平台控制系统控制整个补 偿系统的运行。
所述的数字油缸主要由活塞杆、油缸缸筒、滚珠丝杆、丝杆阀芯联轴器、 阀套、阀芯、阀套定位块、阀芯电机联轴器和驱动电机组成。
所述的数字油缸中的滚珠丝杆的螺母部分安装在中空的活塞杆处,阀套 通过阀套定位块安装在油缸缸筒的尾端,其中阀芯和滚珠丝杆通过丝杆阀芯 联轴器连接,驱动电机安装在联轴器罩上,驱动电机与阀芯通过阀芯电机联 轴器连接。
所述的数字油缸由三通阀控制差动油缸动作;数字油缸的有杆腔和无杆 腔常通高压液压油,在数字油缸的无杆腔端部有内置的三通阀,通过三通阀 的阀口开闭动作控制数字油缸的伸出或缩回动作。
所述的阀芯电机联轴器为铍青铜片作为弹簧片的联轴器,阀芯电机联轴 器用于传递驱动电机的扭矩,带动阀芯旋转,进而带动滚珠丝杆转动;还用 于有效地补偿阀芯运动时的轴向位移,使驱动电机转动时,阀口可以灵敏的 打开;在驱动电机停止转动时,阀口通过铍青铜弹簧片的弹性瞬间关闭。
所述的阀套设计有使阀芯受力平衡的油路,阀芯受向右的液压力受力面 积S1和向左的液压力受力面积S2相等,阀芯受到的向左的液压力和向右的 液压力完全相等,阀芯始终受力平衡。
进一步说,所述的阀芯电机联轴器由驱动电机侧安装端、铍青铜弹簧片 和阀芯侧安装端,驱动电机侧安装端周向设置弹簧片安装耳,阀芯侧安装端 周向对应设置弹簧片安装耳,驱动电机侧安装端的弹簧片安装耳与对应的阀 芯侧安装端的弹簧片安装耳之间通过环形铍青铜弹簧片连接。
进一步说,所述的阀芯上设置有凸起台阶,凸起台阶的左侧通过阀套上 的平衡油路通回油口,凸起台阶的右侧通过阀芯上小通油孔与压力腔相连。
本发明的有益效果是:本发明提供了一种基于数字油缸的海浪补偿系 统,其能有效的补偿波浪产生的设备横摇、纵摇和升沉运动,解决现有加工 母船上由于加工设备横摇、纵摇和升沉产生的水产品在加工时掉落、设备内 单侧堆积、加工过程中水产品相互挤压等问题,满足海上水产品加工母船大 规模连续生产的需求。本发明采用数字油缸取代传统电动推杆或伺服油缸, 可以大幅度简化系统结构、降低制造成本,也有助于提高液压执行器的抗油 液污染能力。本发明中的数字油缸采用压力平衡油路设计,避免了阀芯不平衡力所引起的传动失效、寿命降低等问题,显著延长了数字油缸的使用寿命; 该数字油缸采用铍青铜片作为弹簧片的联轴器,从根本上削减了联轴器不同 部分间相对滑动的摩擦力,可以有效提高阀芯的传动精度,进而提高数字油 缸的传动精度。
附图说明
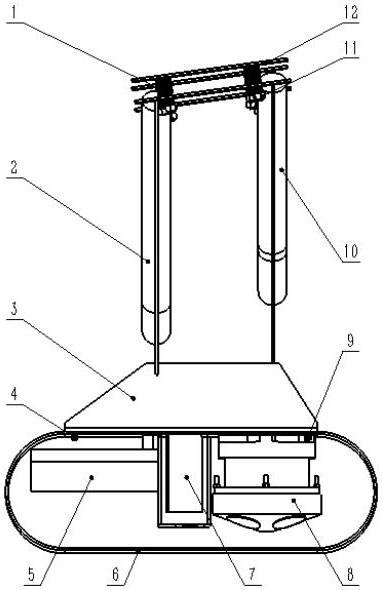
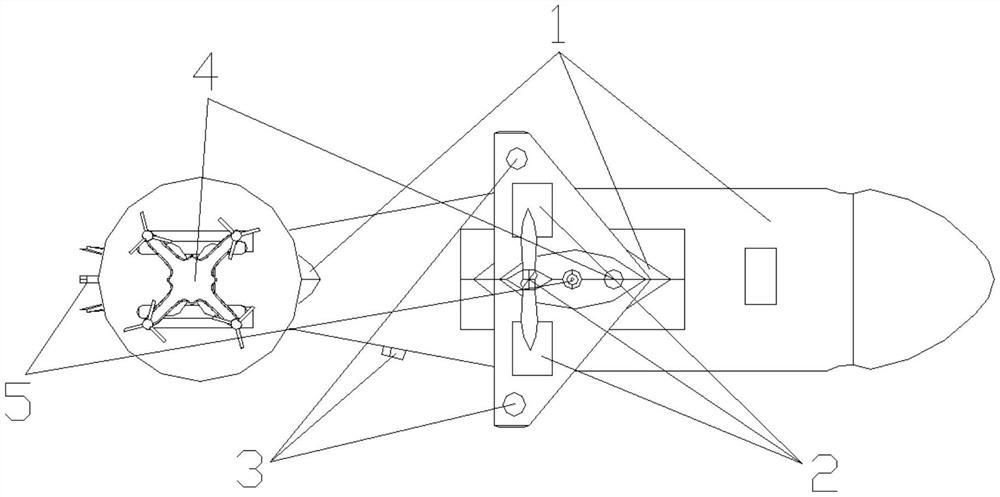
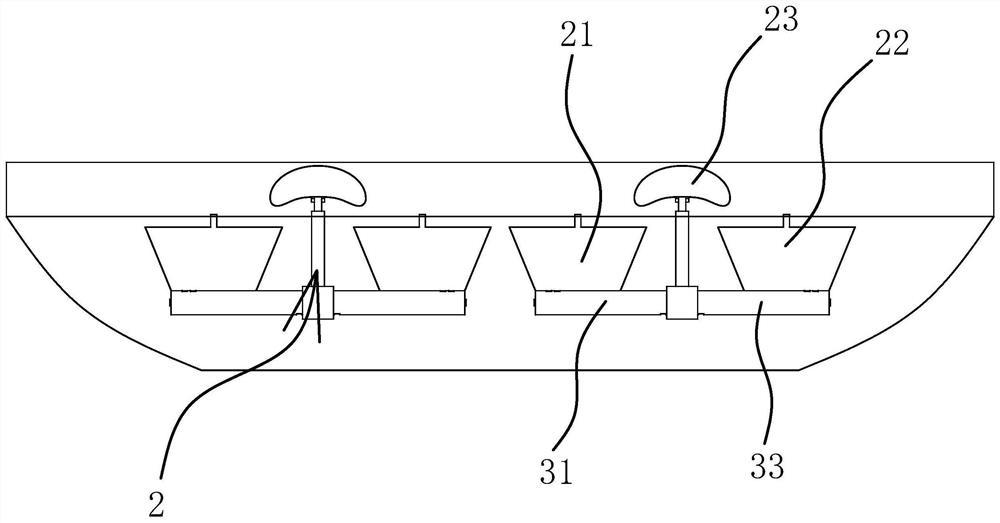
图1为三自由度的并联平台装置示意图;
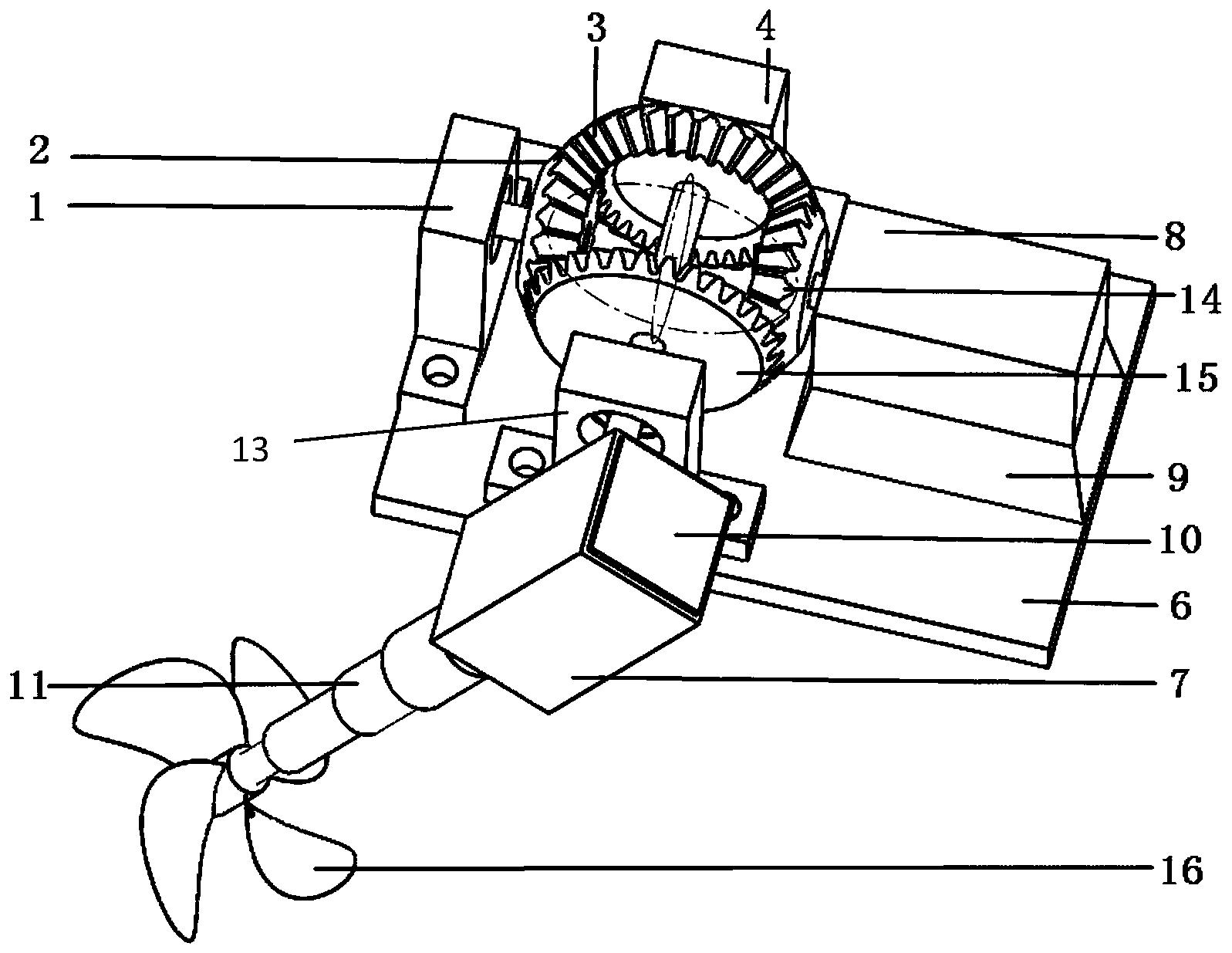
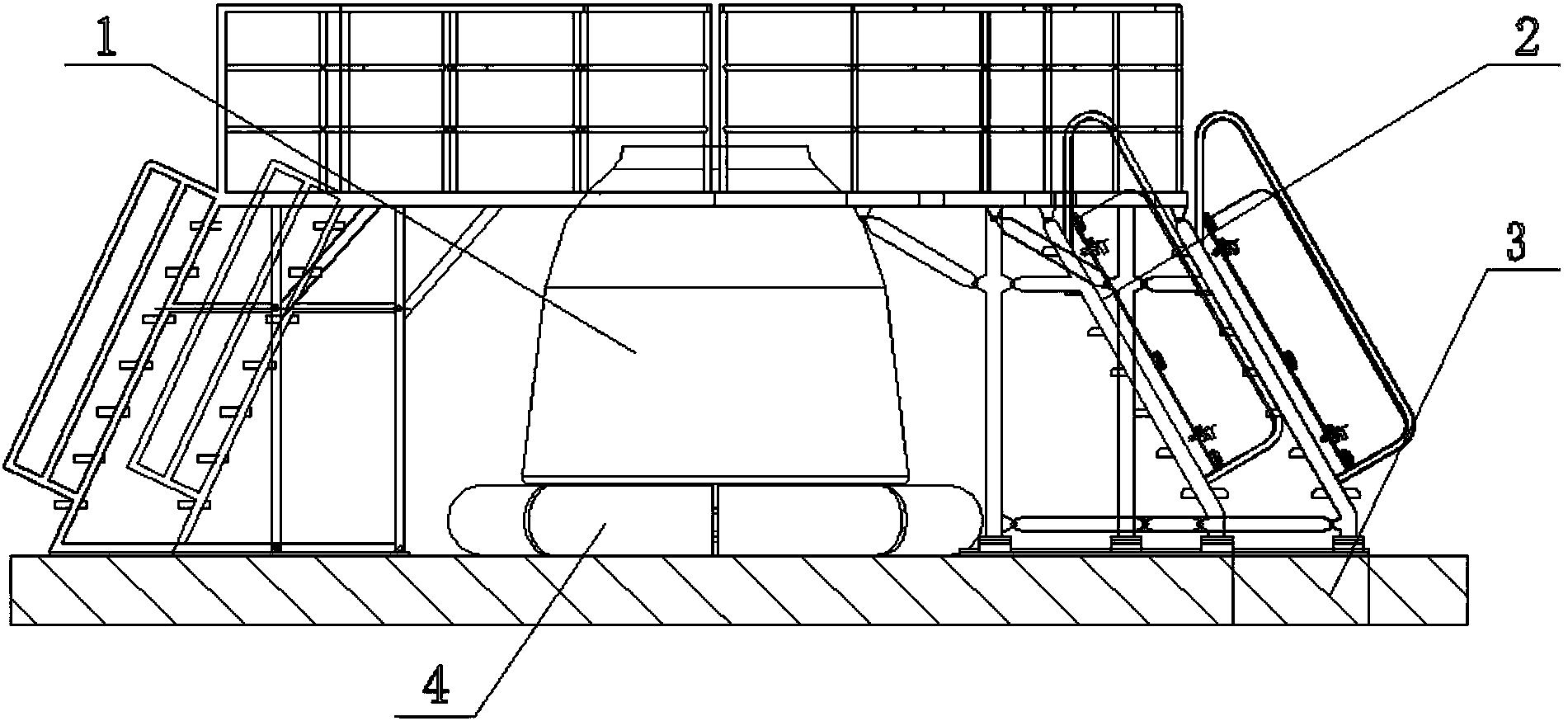
图2a为数字液压缸示意图;
图2b为数字液压缸纵向截面示意图;
图2c为数字液压缸横向向截面示意图;
图2d为图2b的F-F向视图;
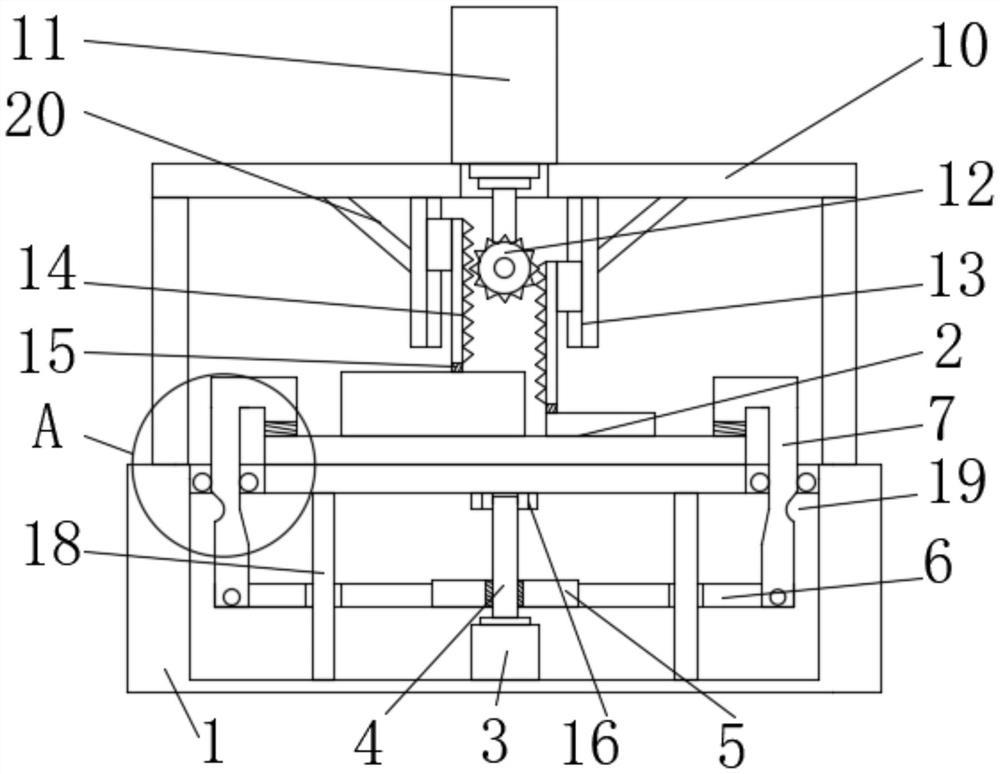
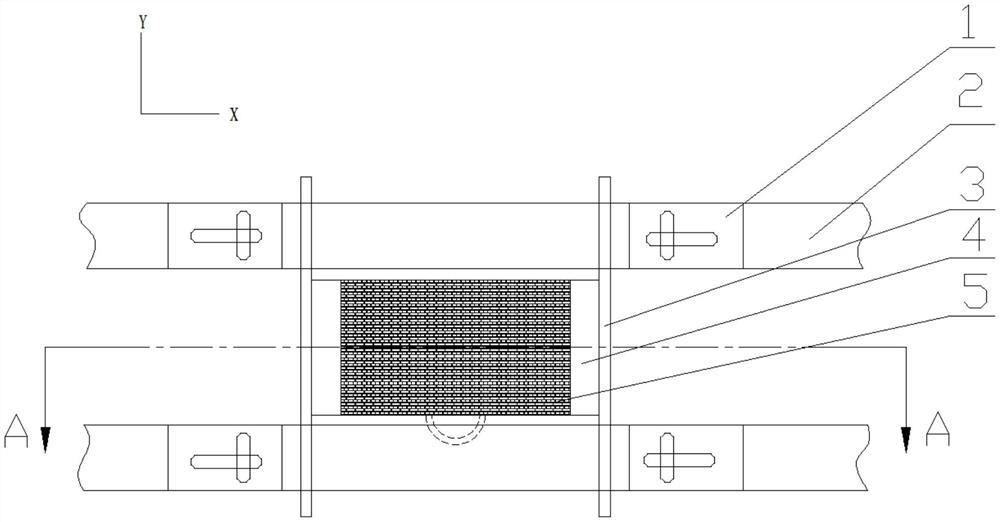
图3为数字液压缸内置控制阀示意图;
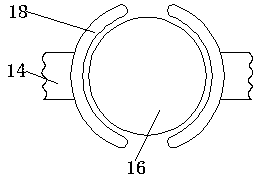
图4为阀芯电机联轴器示意图;
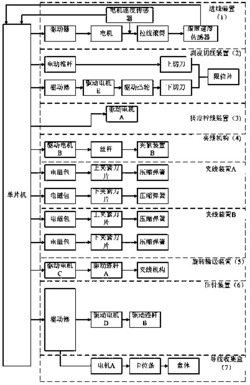
图5为海浪补偿系统控制原理图。
图1中1-数字油缸,2-下绞支,3-上绞支,4-数字液压缸耳环轴,5-数 字液压缸前耳环,6-工作平台,7-液压油管,8-液压供油系统,9-绝对值倾 角传感器,10-平台控制系统,11-基座,12-6轴姿态传感器。
图2a、图2b、图2c和图2中201-活塞杆,202-前缸盖防尘盖板,203- 导向铜套,204-前缸盖,205-前缸盖连接法兰,206-缸筒,207-滚珠丝杆, 208-丝杆阀芯联轴器,209-阀套,210-阀芯,211-后缸盖固定法兰,212-阀 套定位块,213-联轴器罩,214-阀芯电机联轴器,215-驱动电机,216-电机 护罩,217-防尘圈,218-紧固螺钉,219-斯特封,220-O型圈,221-UN封,222-O型圈,223-导向带,224-格莱圈,225-O型圈,226-O型圈,227-O型 圈,228-紧固螺钉。
图3中301-阀套回油口油槽,302-阀套压力口油槽,303-阀套上压力平 衡用油路,304-阀芯中空油路,305-阀芯内部大通油孔,306-阀芯上小通油 孔,S1-阀芯受向右的液压力受力面积,S2-向左的液压力受力面积,S1等于 S2。
图4中为阀芯电机联轴器214的组装示意图,401-驱动电机侧安装端, 402-铍青铜弹簧片,403-阀芯侧安装端。
具体实施方式
本发明主要是由数字液压缸根据控制系统计算的坐标点变化,三根数字 油缸做相应的伸长或缩短的行程变化,对安装在加工母船上的水产加工设备 的横摇、纵摇和升沉运动三个自由度进行补偿。
以下给出本发明的实施例:
如图1所示,本实施例所设计的海洋渔获物船载加工设备海浪补偿系统 主要数字油缸1,下绞支2,上绞支3,数字液压缸耳环轴4,数字液压缸前 耳环5,工作平台6,液压油管7,液压供油系统8,绝对值倾角传感器9, 平台控制系统10,基座11,六轴姿态传感器12组成;其中工作平台6和基 座11通过下绞支2,上绞支3用三根数字油缸连接在一起,检测补偿系统位 置变化用的绝对值倾角传感器9、六轴姿态传感器12安装在基座11上。数 字油缸通过液压供油系统提供液压油,平台控制系统控制整个补偿系统的运 行。
如图2a、图2b、图2c和图2d所示,数字油缸主要由活塞杆201,前缸 盖防尘盖板202,导向铜套203,前缸盖204,前缸盖连接法兰205,缸筒206, 滚珠丝杆207,丝杆阀芯联轴器208,阀套209,阀芯210,后缸盖固定法兰 211,阀套定位块212,联轴器罩213,阀芯电机联轴器214,驱动电机215, 电机护罩216,防尘圈217,紧固螺钉218,斯特封219,O型圈220,UN封 221,O型圈222,导向带223,格莱圈224,O型圈225,O型圈226,O型圈 227,紧固螺钉228等组成。其中滚珠丝杆207,丝杆阀芯联轴器208,阀套 209,阀芯210,后缸盖固定法兰211,阀套定位块212,联轴器罩213,阀 芯电机联轴器214,驱动电机215这几个零件为数字油缸的专有结构。
滚珠丝杆207的螺母部分安装在中空的活塞杆201处,阀套209通过阀 套定位块212安装在油缸缸筒206的尾端,其中阀芯210和滚珠丝杆207通 过丝杆阀芯联轴器208连接,驱动电机215安装在联轴器罩213上,驱动电 机215与阀芯210通过阀芯电机联轴器214。
所述的数字油缸是由三通阀控制差动油缸动作。数字油缸的有杆腔和无 杆腔常通高压液压油,在数字油缸的无杆腔端部有内置的三通阀结构,通过 三通阀的阀口开闭动作控制数字油缸的伸出缩回动作。三通阀的阀芯结构简 单,避免阀芯加工多级同心的困难,降低加工的难度和成本。
如图4所示,阀芯电机联轴器214为自制的用铍青铜片作为弹簧片的联 轴器,阀芯电机联轴器214不仅可以有效地传递驱动电机215的扭矩,带动 阀芯210旋转,进而带动滚珠丝杆207转动,还可以有效地补偿阀芯210运 动时的轴向位移补偿,驱动电机215转动时可以灵敏的打开阀口,在驱动电 机215停止转动时也可以瞬间通过铍青铜弹簧片402的弹性瞬间关闭阀口。 其中402铍青铜弹簧片为0.3mm的自制弹簧缓冲零件,可精确地补偿阀芯的 偏移量并保证阀口准确的闭合。
数字油缸中滚珠丝杆207的导程为5mm,数字油缸的有杆腔在前端盖204 处常通压力油,在缸筒6处开有回油口和压力油口,分别与安装于数字油缸 内部的阀套9上的阀套回油口油槽301,阀套压力口油槽302对齐。
假设油缸1需要伸长15mm。首先,由平台控制系统10向驱动电机215 发送已调制好的能使滚珠丝杆转动15mm距离的脉冲信号,当驱动电机215 接收到脉冲信号后,就会按相应的规律输出一定的角速度和角位移,这里滚 珠丝杆207为右旋滚珠丝杆,驱动电机215逆旋顺时针转动,这一运动通过 阀芯电机联轴器214、丝杆阀芯联轴器208和阀芯209传到滚珠丝杆207上, 滚珠丝杆207的丝杆螺母在活塞的端部位置固定,只能移动,不能转动。在旋转作用下,滚珠丝杆207带动阀芯209产生轴向位移,带动滚珠丝杆207 向右移。因为阀芯210和阀套209采用的是没有死区的零开口形式,输入脉 冲信号后阀芯209移动,阀口打开,高压液压油通过阀套压力口油槽302、 阀芯内部大通油孔305、阀芯中空油路304流入液压缸无杆腔,进而带动油 缸活塞杆201向左移动,当驱动电机停转后,活塞杆也立刻停止移动,阀口 关闭,完成数字油缸的行程变化。
假设油缸1需要缩短15mm,首先由平台控制系统10向驱动电机215发 送已调制好的能使滚珠丝杆转动15mm距离的脉冲信号,当驱动电机215接 收到脉冲信号后,就会按相应的规律输出一定的角速度和角位移,这里滚珠 丝杆207为右旋滚珠丝杆,驱动电机215顺时针转动,这一运动通过阀芯电 机联轴器214、丝杆阀芯联轴器208和阀芯209传到滚珠丝杆207上,滚珠 丝杆207的丝杆螺母在活塞的端部位置固定,只能移动,不能转动。在旋转作用下,滚珠丝杆207带动阀芯209产生轴向左位移。因为阀芯210和阀套 209采用的是没有死区的零开口形式,输入脉冲信号后阀芯209向右移动, 阀口打开,数字油缸无杆腔的高压液压油通过阀套阀芯中空油路304、阀芯 内部大通油孔305、回油口油槽301流出数字油缸无杆腔,经过回油管回到 油箱,进而带动油缸活塞杆201向右移动,当驱动电机215停转后,活塞杆 201也立刻停止向右移动,阀口关闭,完成数字油缸的行程变化。
另外阀套209这里还设计有使阀芯210前后压力平衡油路303,平衡油 路303常通回油口,可以保持阀芯凸起台阶的圆环面左侧不受高压油作用。 当阀芯中空油路304中通压力油时,阀芯210整体受到一个向右的液压力, 阀芯向右受力面的直径为φB=15mm,受力面积为 为平衡这个向 右的液压力在阀芯的右侧设计了一个直径为φA=21.2mm的台阶,φA的面积 台阶的左侧通过阀套上压力平衡用油路303常通回油口, 台阶的右侧通过阀芯上小通油孔306与压力腔相连,所以阀芯也受到向左的 液压力,由于 所以阀芯受到向左的液压力的受力面积也为 阀 芯210右侧受压的环形面的面积和阀芯小直径φB对应的圆形面积 严格一 致,因为阀芯台阶左右两处的油液压力相同,所以阀芯210向左的液压力和 向右的液压力相等,阀芯始终受力平衡,见图3。
图5为海浪补偿系统的控制原理图,三个数字油缸通过液压泵提供液压 油,并通过溢流阀调定整个液压系统的压力。数字油缸的运动控制是通过232 模块实时读取绝对值姿态传感器和6轴倾角传感器的数据,并通过PLC进行 数据处理,将处理好的数字油缸运行数据发送到电机驱动器,电机驱动器驱 动三个电机各自运行系统需要的补偿量。具体控制方法如下:
以基座重心为(0,0,0)点,系统稳定时,重心到某个铰支为Y轴,X轴与 Y轴垂直,Z轴符合右手螺旋法则。只考虑横滚和俯仰运动,假设横滚角α, 俯仰角β,基座平面上某点(x,y,0)经过横滚和俯仰运动后,坐标为:(x·cosα,y·cosβ-x·sinα·sinβ,y·sinβ+x·sinα·cosβ) 基座为外接圆半径为R的正三角形,工作平台为外接圆半径为r的正三角形。初始状态,基座与工作平台平行、重心重合且数字液压缸延长线汇聚于同一 点。基座三个支点坐标为(0,R,0), 工作平台三个支点坐标为(0,r,h),
运动过程中,基座随船发生横滚和俯仰,横滚和俯仰后,基座坐标变为 (0,R cosβ,R sinβ),
为实现工作平台不发生俯仰和横滚运动,三个数字缸的长度需满足公式: L1
海洋渔获物船载加工设备海浪补偿系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0