









专利摘要
本发明公开了一种高速铁路轨道不整平状态下测量轨道未知点的计算方法,包括步骤:一、自由架设全站仪;二、建立全站仪的仪器中心点与CPIII控制点之间的观测方程组;三、确定全站仪的仪器中心点与CPIII控制点之间的误差方程;四、计算全站仪的仪器中心点p在CPIII坐标系统中的三维坐标;五、计算高速铁路轨道上轨道未知点的坐标。本发明以CPIII控制点的国家坐标为基准,将全站仪的仪器中心点视为相位中心,通过构建空间距离的误差方程和权阵,利用最小二乘原理求出全站仪的仪器中心点的CPIII坐标,再通过极坐标法就可以得到轨道未知点的坐标。
权利要求
1.高速铁路轨道不整平状态下测量轨道未知点的计算方法,其特征在于,该方法包括以下步骤:
步骤一、自由架设全站仪:在高速铁路轨道(2)的两侧共选取I个CPIII控制点(1),在I个CPIII控制点(1)之间的区域自由架设全站仪,其中,I为不小于3的正整数;
步骤二、建立全站仪的仪器中心点与CPIII控制点之间的观测方程组:根据公式
步骤三、确定全站仪的仪器中心点与CPIII控制点之间的误差方程:根据全站仪的仪器中心点与CPIII控制点之间的观测方程组
全站仪的仪器中心点与CPIII控制点之间的误差方程的矩阵形式为
步骤四、计算全站仪的仪器中心点(p)在CPIII坐标系统中的三维坐标:利用最小二乘平差原理对全站仪的仪器中心点与CPIII控制点之间的误差方程进行解算,得全站仪的仪器中心点(p)在CPIII坐标系统中的三维坐标的中间参量
根据公式
步骤五、计算高速铁路轨道上轨道未知点的坐标:根据公式
2.按照权利要求1所述的高速铁路轨道不整平状态下测量轨道未知点的计算方法,其特征在于:步骤一中I的取值范围为3~10。
3.按照权利要求1所述的高速铁路轨道不整平状态下测量轨道未知点的计算方法,其特征在于:步骤一中I个CPIII控制点(1)分别设置在高速铁路轨道(2)的两侧护栏上。
说明书
技术领域
本发明属于轨道未知点计算技术领域,具体涉及一种高速铁路轨道不整平状态下测量轨道未知点的计算方法。
背景技术
在高速铁路轨道精调测量过程中,高速铁路轨道精调所属的坐标系统为国家坐标系,即为CPIII坐标系统,现有铁路轨道线路检测的测量过程中主要采用的是仪器整平情况下的自由设站法,而全站仪自由设站法得到的是站心球坐标系统,因此需要通过坐标转换方法将站心坐标系中的坐标转换为CPIII坐标系统。自由设站法测量中全站仪所获得点位坐标为站心坐标系,即以全站仪相位中心为原点,建立左手空间直角坐标系统,自由设站法中每次测站测量的范围较小,需要多次安置整平仪器,意味着测量需要多次进行仪器的整平,这样会严重影响轨道精调的进度和效率。因此,现如今缺少一种在不整平的情况下直接安置仪器进行测量工作的且作业效率高的高速铁路轨道不整平状态下测量轨道未知点的计算方法。
发明内容
本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种高速铁路轨道不整平状态下测量轨道未知点的计算方法,以CPIII控制点的国家坐标为基准,将全站仪的仪器中心点视为相位中心,通过构建空间距离的误差方程和权阵,利用最小二乘原理求出全站仪的仪器中心点的CPIII坐标,再通过极坐标法就可以得到轨道未知点的坐标,便于推广使用。
为解决上述技术问题,本发明采用的技术方案是:高速铁路轨道不整平状态下测量轨道未知点的计算方法,其特征在于,该方法包括以下步骤:
步骤一、自由架设全站仪:在高速铁路轨道的两侧共选取I个CPIII控制点,在I个CPIII控制点之间的区域自由架设全站仪,其中,I为不小于3的正整数;
步骤二、建立全站仪的仪器中心点与CPIII控制点之间的观测方程组:根据公式 建立全站仪的仪器中心点与CPIII控制点之间的观测方程组,其中,Si为全站仪的仪器中心点p至第i个CPIII控制点的距离,即为观测量,i为CPIII控制点的编号且i=1,2,…,I;VSi为全站仪的仪器中心点p至第i个CPIII控制点的坐标改正数,(xp,yp,zp)为全站仪的仪器中心点p在CPIII坐标系统中的三维坐标,(x
步骤三、确定全站仪的仪器中心点与CPIII控制点之间的误差方程:根据全站仪的仪器中心点与CPIII控制点之间的观测方程组 确定全站仪的仪器中心点与CPIII控制点之间的误差方程 其中, 为全站仪的仪器中心点p在CPIII坐标系统中的三维坐标估计值; 为全站仪的仪器中心点p至第i个CPIII控制点的距离的初始值; 为全站仪的仪器中心点p在CPIII坐标系统中的三维坐标的中间参量;
全站仪的仪器中心点与CPIII控制点之间的误差方程的矩阵形式为 即
步骤四、计算全站仪的仪器中心点p在CPIII坐标系统中的三维坐标:利用最小二乘平差原理对全站仪的仪器中心点与CPIII控制点之间的误差方程进行解算,得全站仪的仪器中心点p在CPIII坐标系统中的三维坐标的中间参量 其中,H为观测量的权阵且 Hi为观测量的权阵中第i行第i列的元素且 a为全站仪的固定误差,b为全站仪的比例误差;
根据公式 计算全站仪的仪器中心点p在CPIII坐标系统中的三维坐标(xp,yp,zp);
步骤五、计算高速铁路轨道上轨道未知点的坐标:根据公式 计算高速铁路轨道上轨道未知点的坐标(xk,yk,zk),其中,Spk为全站仪的仪器中心点p与轨道未知点之间的距离,αpi为全站仪的仪器中心点p至第i个CPIII控制点的方位角,ξpi为全站仪的仪器中心点p和第i个CPIII控制点的连线与全站仪的仪器中心点p和轨道未知点的连线之间的夹角,βpk为全站仪的仪器中心点p和轨道未知点的连线与水平面的夹角,即为垂直角。
上述的高速铁路轨道不整平状态下测量轨道未知点的计算方法,其特征在于:步骤一中I的取值范围为3~10。
上述的高速铁路轨道不整平状态下测量轨道未知点的计算方法,其特征在于:步骤一中I个CPIII控制点分别设置在高速铁路轨道的两侧护栏上。
本发明与现有技术相比具有以下优点:
1、本发明以CPIII控制点的国家坐标为基准,将全站仪的仪器中心点视为相位中心,通过构建空间距离的误差方程和权阵,误差方程的列数少且固定,仅有3列,其矩阵元素主要是单位矢量,误差方程易于建立,容易进行程序设计,因为只解算3个未知数,因此需要3个已知的CPIII控制点就能完成平差计算,便于推广使用。
2、本发明将全站仪的仪器中心点p视为测站点,以任意CPIII控制点视为后视点,轨道未知点为前视点,通过测量全站仪的仪器中心点p至第i个CPIII控制点的方位角、全站仪的仪器中心点p和第i个CPIII控制点的连线与全站仪的仪器中心点p和轨道未知点的连线之间的夹角、以及全站仪的仪器中心点p和轨道未知点的连线与水平面的夹角,利用极坐标法就可以得到轨道未知点的国家坐标,可靠稳定,使用效果好。
3、本发明方法步骤简单,不整平测量进行自由设站点CPIII坐标测量具有同样的精度和更高的作业效率,当高速铁路轨道的超高达到最大为17cm时,精度仍然能够达到mm级,提高了轨道精调的进度和效率,便于推广使用。
综上所述,本发明以CPIII控制点的国家坐标为基准,将全站仪的仪器中心点视为相位中心,通过构建空间距离的误差方程和权阵,利用最小二乘原理求出全站仪的仪器中心点的CPIII坐标,再通过极坐标法就可以得到轨道未知点的坐标,便于推广使用。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
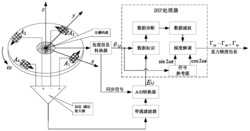
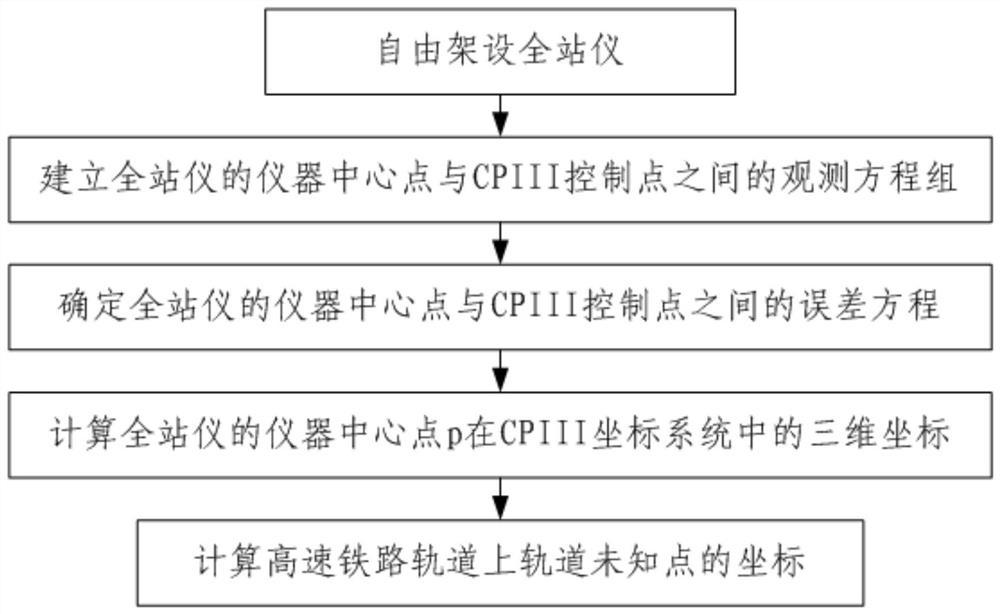
图1为本发明测量原理示意图。
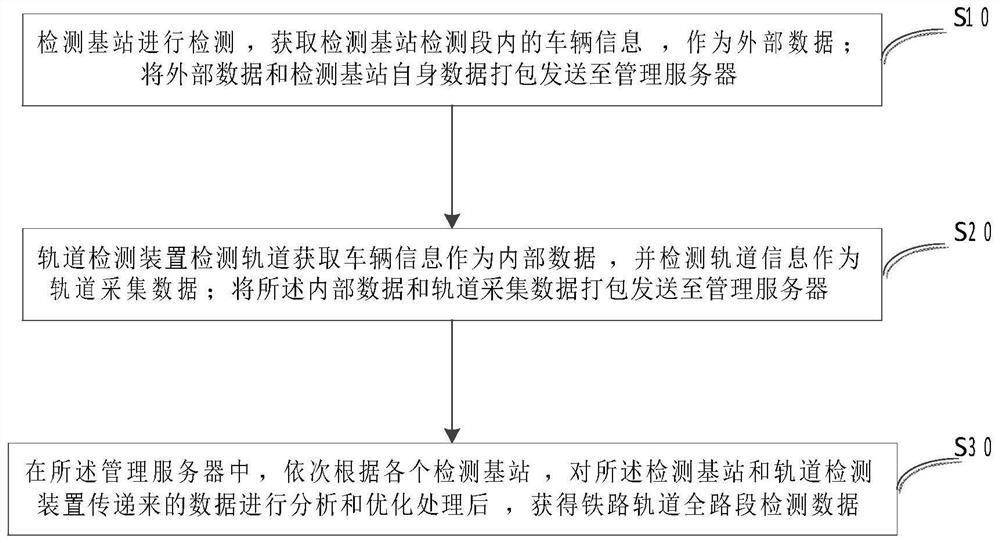
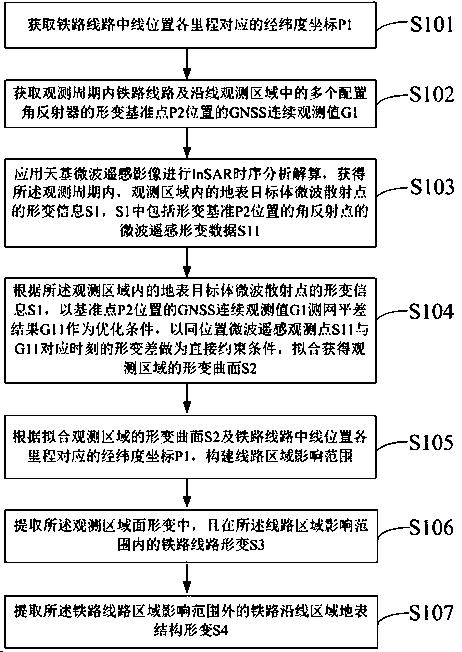
图2为本发明方法的方法流程框图。
附图标记说明:
1—CPIII控制点; 2—高速铁路轨道;3—轨道未知点。
具体实施方式
如图1和图2所示,本发明的高速铁路轨道不整平状态下测量轨道未知点的计算方法,包括以下步骤:
步骤一、自由架设全站仪:在高速铁路轨道2的两侧共选取I个CPIII控制点1,在I个CPIII控制点1之间的区域自由架设全站仪,其中,I为不小于3的正整数;
本实施例中,步骤一中I的取值范围为3~10。
本实施例中,步骤一中I个CPIII控制点1分别设置在高速铁路轨道2的两侧护栏上。
本实施例中,不整平测量进行自由设站点CPIII坐标测量具有同样的精度和更高的作业效率,当高速铁路轨道的超高达到最大为17cm时,精度仍然能够达到mm级,提高了轨道精调或检测的进度和效率。
步骤二、建立全站仪的仪器中心点与CPIII控制点之间的观测方程组:根据公式 建立全站仪的仪器中心点与CPIII控制点之间的观测方程组,其中,Si为全站仪的仪器中心点p至第i个CPIII控制点1的距离,即为观测量,i为CPIII控制点1的编号且i=1,2,…,I;VSi为全站仪的仪器中心点p至第i个CPIII控制点1的坐标改正数,(xp,yp,zp)为全站仪的仪器中心点p在CPIII坐标系统中的三维坐标,(x
步骤三、确定全站仪的仪器中心点与CPIII控制点之间的误差方程:根据全站仪的仪器中心点与CPIII控制点之间的观测方程组 确定全站仪的仪器中心点与CPIII控制点之间的误差方程 其中, 为全站仪的仪器中心点p在CPIII坐标系统中的三维坐标估计值; 为全站仪的仪器中心点p至第i个CPIII控制点1的距离的初始值; 为全站仪的仪器中心点p在CPIII坐标系统中的三维坐标的中间参量;
全站仪的仪器中心点与CPIII控制点之间的误差方程的矩阵形式为 即
步骤四、计算全站仪的仪器中心点p在CPIII坐标系统中的三维坐标:利用最小二乘平差原理对全站仪的仪器中心点与CPIII控制点之间的误差方程进行解算,得全站仪的仪器中心点p在CPIII坐标系统中的三维坐标的中间参量 其中,H为观测量的权阵且 Hi为观测量的权阵中第i行第i列的元素且 a为全站仪的固定误差,b为全站仪的比例误差;
根据公式 计算全站仪的仪器中心点p在CPIII坐标系统中的三维坐标(xp,yp,zp);
本实施例中,以CPIII控制点的国家坐标为基准,将全站仪的仪器中心点视为相位中心,通过构建空间距离的误差方程和权阵,误差方程的列数少且固定,仅有3列,其矩阵元素主要是单位矢量,误差方程易于建立,容易进行程序设计,因为只解算3个未知数,因此需要3个已知的CPIII控制点就能完成平差计算。
步骤五、计算高速铁路轨道上轨道未知点的坐标:根据公式 计算高速铁路轨道2上轨道未知点3的坐标(xk,yk,zk),其中,Spk为全站仪的仪器中心点p与轨道未知点3之间的距离,αpi为全站仪的仪器中心点p至第i个CPIII控制点1的方位角,ξpi为全站仪的仪器中心点p和第i个CPIII控制点1的连线与全站仪的仪器中心点p和轨道未知点3的连线之间的夹角,βpk为全站仪的仪器中心点p和轨道未知点3的连线与水平面的夹角,即为垂直角。
本实施例中,将全站仪的仪器中心点p视为测站点,以任意CPIII控制点视为后视点,轨道未知点为前视点,通过测量全站仪的仪器中心点p至第i个CPIII控制点的方位角、全站仪的仪器中心点p和第i个CPIII控制点的连线与全站仪的仪器中心点p和轨道未知点的连线之间的夹角、以及全站仪的仪器中心点p和轨道未知点的连线与水平面的夹角,利用极坐标法就可以得到轨道未知点的国家坐标,可靠稳定,使用效果好。
本发明使用时,优选的,在高速铁路轨道2的两侧共选取7个CPIII控制点1,在7个CPIII控制点1之间的区域自由架设全站仪,第一次测量对全站仪进行整平处理,此时高速铁路轨道2无超高,利用全站仪测量出了7个CPIII控制点1在整平测量情况下的空间距离,以及全站仪的仪器中心点p至轨道未知点k的空间距离、夹角和垂直角,7个CPIII控制点具有国家坐标系中的坐标和高程,观测数据如表1所示。
表1
全站仪的仪器中心点p与轨道未知点3之间的距离为108.620582m,全站仪的仪器中心点p和第1个CPIII控制点1的连线与全站仪的仪器中心点p和轨道未知点3的连线之间的夹角为183.284507°,全站仪的仪器中心点p和轨道未知点3的连线与水平面的夹角为0.049220°;
第二次测量,不对全站仪进行整平处理,此时高速铁路轨道2存在倾斜,但不是最大倾斜,利用全站仪测量出了7个CPIII控制点1在不整平测量情况下的空间距离,以及全站仪的仪器中心点p至轨道未知点k的空间距离、夹角和垂直角,7个CPIII控制点具有国家坐标系中的坐标和高程,观测数据如表2所示。
表2
全站仪的仪器中心点p与轨道未知点3之间的距离为108.620989m,全站仪的仪器中心点p和第1个CPIII控制点1的连线与全站仪的仪器中心点p和轨道未知点3的连线之间的夹角为183.288425°,全站仪的仪器中心点p和轨道未知点3的连线与水平面的夹角为0.085364°;
第三次测量,不对全站仪进行整平处理,此时高速铁路轨道2存在倾斜且为最大倾斜,最大倾斜时,高速铁路轨道的超高达到最大17cm,利用全站仪测量出了7个CPIII控制点1在不整平测量情况下的空间距离,以及全站仪的仪器中心点p至轨道未知点k的空间距离、夹角和垂直角,7个CPIII控制点具有国家坐标系中的坐标和高程,观测数据如表3所示。
表3
全站仪的仪器中心点p与轨道未知点3之间的距离为108.627076m,全站仪的仪器中心点p和第1个CPIII控制点1的连线与全站仪的仪器中心点p和轨道未知点3的连线之间的夹角为183.227485°,全站仪的仪器中心点p和轨道未知点3的连线与水平面的夹角为0.068744°;统计三次测量中轨道未知点3的坐标,如表4所示。
表4
从表4可以看出,不整平状态和整平状态下坐标的差值最大为4.7mm,不超过限差5mm(平面和高程限差为5mm),不整平测量进行自由设站点CPIII坐标测量具有同样的精度和更高的作业效率,当高速铁路轨道的超高达到最大为17cm时,精度仍然能够达到mm级,提高了轨道精调的进度和效率,完全能够满足高速铁路轨道检测的要求。
以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。
高速铁路轨道不整平状态下测量轨道未知点的计算方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



动态评分
0.0