







专利摘要
本发明涉及一种电动汽车的制动能量回馈控制方法,属于电动汽车设计技术领域。本方法调节前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm包括:收到来自制动主缸的压力信号如果ABS在工作,则电动机制动力Fm=0,前轴液压制动力Fhf与后轴液压制动力Fhr转交由ABS调节;如果ABS未工作,则根据实际制动力Fba是否满足驾驶员的制动要求的阈值F、驱动轮的滑移率阈值S,以及电动机转矩极限等因素进行调节,直到制动踏板被松开,制动结束。本方法针对单轴电驱动、电液复合制动的电动汽车,可不依赖于精确的路面状态辨识,主动避免车轮抱死的发生,能取得较高的能量回馈效率。
权利要求
1、一种电动汽车的制动能量回馈控制方法,用于前轴电驱动汽车,包括以下步骤:
1)收到来自制动主缸的压力信号,制动开始;
2)采集制动主缸压力、制动踏板行程、电动机转矩、车轮转速和车辆加速度信号,计算驾驶员的需求制动力Fbr、车辆的实际制动力Fba、前轴车轮滑移率Sf;
3)调节前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm;具体调节为:
(1)如果ABS在工作,则电动机制动力Fm=0,前轴液压制动力Fhf与后轴液压制动力Fhr转交由ABS调节;
(2)如果ABS未工作,判断实际制动力Fba是否满足驾驶员的制动要求的阈值F:
(21)如果Fba大于F,则:
(211)如果前轴车轮滑移率Sf小于或等于滑移率阈值S,则前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm均与上一时刻相同;
(212)如果前轴车轮滑移率Sf大于S,则减小电动机制动力Fm,增加后轴液压制动力Fhr,使前轴车轮滑移率Sf减小;
(22)如果Fba小于或等于F,则:
(221)如果前轴车轮滑移率Sf小于或等于S,计算电动机转矩极限,若电动机转矩小于转矩极限,则增加电动机制动力Fm;
(222)如果前轴车轮滑移率Sf小于或等于S,但是电动机转矩已达到计算出的转矩极限不可再增加,则调节前轴液压制动力Fhf与后轴液压制动力Fhr,使工作点与I曲线的距离最短;
(223)如果前轴车轮滑移率Sf大于S,则减小电动机制动力Fm,增加后轴液压制动力Fhr,使前轴车轮滑移率Sf减小;
4)重复执行步骤2)-3),直到制动踏板被松开,制动结束。
2、一种电动汽车的制动能量回馈控制方法,用于后轴电驱动汽车,包括以下步骤:
1)收到来自制动主缸的压力信号,制动开始;
2)采集制动主缸压力、制动踏板行程、电动机转矩、车轮转速和车辆加速度信号,计算驾驶员的需求制动力Fbr、车辆的实际制动力Fba、后轴车轮滑移率Sr;
3)调节前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm;具体调节为:
(1)如果ABS在工作,则电动机制动力Fm=0,前轴液压制动力Fhf与后轴液压制动力Fhr转交由ABS调节;
(2)如果ABS未工作,判断实际制动力Fba是否满足驾驶员的制动要求的阈值F;
(21)如果Fba大于F,则:
(211)如果后轴车轮滑移率Sr小于或等于滑移率阈值S,则前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm均与上一时刻相同;
(212)如果后轴车轮滑移率Sr大于S,则减小电动机制动力Fm,增加前轴液压制动力Fhf,使后轴车轮滑移率Sr减小;
(22)如果Fba小于或等于F,则:
(221)如果后轴车轮滑移率Sr小于或等于S,计算电动机转矩极限,若电动机转矩小于转矩极限,则增加电动机制动力Fm;
(222)如果前轴车轮滑移率Sf小于或等于S,但是电动机转矩已达到计算出的转矩极限不可再增加,则调节前轴液压制动力Fhf与后轴液压制动力Fhr,使工作点与I曲线的距离最短;
(223)如果后轴车轮滑移率Sr大于S,则减小电动机制动力Fm,增加前轴液压制动力Fhf,使后轴车轮滑移率Sr减小;
4)重复执行步骤2)-3),直到制动踏板被松开,制动结束。
说明书
技术领域技术领域
本发明属于电动汽车设计技术领域,特别涉及一种单轴电驱动、电液复合制动的电动汽车的制动能量回馈控制方法。
技术背景背景技术
电动汽车作为日益加剧的环境压力下发展的一种新型车辆,已成为汽车工业界的研究重点之一。制动能量回馈是电动汽车提高能量使用效率的手段之一。汽车制动时的动能通过电动机被转化成电能保存在能量存储装置中,而不是像传统车辆中那样通过摩擦耗散在空气中。对单轴电驱动车辆,现有的制动能量回馈控制方法为:
一、辨识当前路面附着系数。
二、计算前后轴在该路面附着系数下能获得的最大制动力。
三、以回馈能量最大化为原则,分配电动机制动力与液压制动力。
四、如果ABS开始工作,停止制动能量回馈。
上述方法存在以下缺点:
一、要求精确的路面状态辨识结果,在实际应用于难以获得满意的效果。
二、在ABS工作后被动地停止能量回馈,但不能在ABS工作前主动避免车轮抱死的发生。
发明内容发明内容
本发明的目的是克服已有控制方法的不足,提出一种电动汽车的制动能量回馈控制方法。本方法针对单轴电驱动、电液复合制动的电动汽车,可不依赖于精确的路面状态辨识,主动避免车轮抱死的发生,能取得较高的能量回馈效率。
本发明提出一种电动汽车的制动能量回馈控制方法,用于前轴电驱动汽车,包括以下步骤:
1)收到来自制动主缸的压力信号,制动开始;
2)采集制动主缸压力、制动踏板行程、电动机转矩、车轮转速和车辆加速度等信号,计算驾驶员的需求制动力Fbr、车辆的实际制动力Fba、前轴车轮滑移率Sf;
3)调节前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm;具体调节为:
(1)如果ABS在工作,则电动机制动力Fm=0,前轴液压制动力Fhf与后轴液压制动力Fhr转交由ABS调节;
(2)如果ABS未工作,判断实际制动力Fba是否满足驾驶员的制动要求的阈值F:
(21)如果Fba大于F,则:
(211)如果前轴车轮滑移率Sf小于或等于滑移率阈值S,则前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm均与上一时刻相同;
(212)如果前轴车轮滑移率Sf大于S,则减小电动机制动力Fm,增加后轴液压制动力Fhr,使前轴车轮滑移率Sf减小;
(22)如果Fba小于或等于F,则:
(221)如果前轴车轮滑移率Sf小于或等于S,计算电动机转矩极限,若电动机转矩小于转矩极限,则增加电动机制动力Fm;
(222)如果前轴车轮滑移率Sf小于或等于S,但是电动机转矩已达到计算出的转矩极限不可再增加,则调节前轴液压制动力Fhf与后轴液压制动力Fhr,使工作点与I曲线的距离最短;
(223)如果前轴车轮滑移率Sf大于S,则减小电动机制动力Fm,增加后轴液压制动力Fhr,使前轴车轮滑移率Sf减小;
4)重复执行步骤2)-3),直到制动踏板被松开,制动结束。
本发明提出的另一种电动汽车的制动能量回馈控制方法,用于后轴电驱动汽车,包括以下步骤:
1)收到来自制动主缸的压力信号,制动开始;
2)采集制动主缸压力、制动踏板行程、电动机转矩、车轮转速和车辆加速度等信号,计算驾驶员的需求制动力Fbr、车辆的实际制动力Fba、后轴车轮滑移率Sr;
3)调节前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm;具体调节为:
(1)如果ABS在工作,则电动机制动力Fm=0,前轴液压制动力Fhf与后轴液压制动力Fhr转交由ABS调节;
(2)如果ABS未工作,判断实际制动力Fba是否满足驾驶员的制动要求的阈值F;
(21)如果Fba大于F,则:
(211)如果后轴车轮滑移率Sr小于或等于滑移率阈值S,则前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm均与上一时刻相同;
(212)如果后轴车轮滑移率Sr大于S,则减小电动机制动力Fm,增加前轴液压制动力Fhf,使后轴车轮滑移率Sr减小;
(22)如果Fba小于或等于F,则:
(221)如果后轴车轮滑移率Sr小于或等于S,计算电动机转矩极限,若电动机转矩小于转矩极限,则增加电动机制动力Fm;
(222)如果前轴车轮滑移率Sf小于或等于S,但是电动机转矩已达到计算出的转矩极限不可再增加,则调节前轴液压制动力Fhf与后轴液压制动力Fhr,使工作点与I曲线的距离最短;
(223)如果后轴车轮滑移率Sr大于S,则减小电动机制动力Fm,增加前轴液压制动力Fhf,使后轴车轮滑移率Sr减小;
4)重复执行步骤2)-3),直到制动踏板被松开,制动结束。
本发明采用的技术方案的特点是:不对路面附着状态进行辨识,而是直接测量车轮滑移率,判断所加制动力是否超出了制动稳定性要求的范围,并在不超出范围的前提下,尽可能地利用电动机完成制动。如果电驱动轴轮胎的滑移率还很小,说明路面附着系数相对足够,可以继续增加该轴上的电动机回馈制动力,直到制动力满足驾驶员需求或该轴轮胎滑移率足够大。如果电驱动轴轮胎的滑移率已较大,继续增加回馈制动力会导致车轮抱死,则靠增加非电驱动轴的液压制动力来满足驾驶员要求。
本发明的有益效果是:避免路面状态辨识的复杂运算,主动避免车轮抱死的发生,实现较高的制动能量回馈效率。
附图说明附图说明
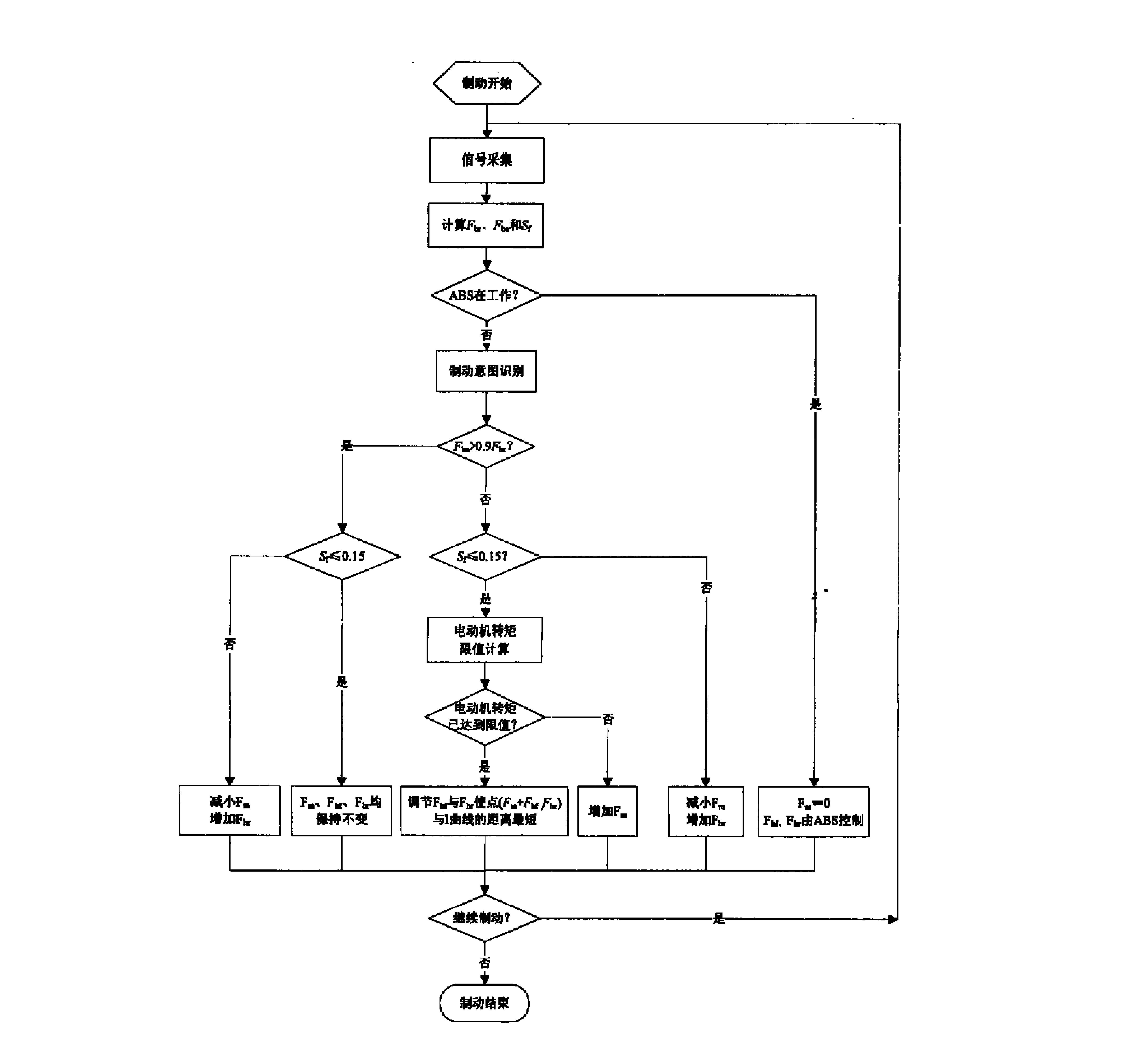
图1是用于前轴电驱动汽车的制动能量回馈控制流程图。
图2是用于后轴电驱动汽车的制动能量回馈控制流程图。
具体实施方式具体实施方式
下面结合图1、2对本发明进行进一步描述如下。
本发明用于前轴电驱动汽车的制动能量回馈控制方法实施例1如图1所示,包括以下步骤:
1)收到来自制动主缸的压力信号(当驾驶员踩下制动踏板时产生的压力信号),制动开始;
2)采集制动主缸压力、制动踏板行程、电动机转矩、车轮转速和车辆加速度等信号,计算驾驶员的需求制动力Fbr、车辆的实际制动力Fba、前轴车轮滑移率Sf(属于本领域常规技术);
3)调节前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm;具体调节为:
(1)如果ABS在工作(即发生车轮抱死),则电动机制动力Fm=0,前轴液压制动力Fhf与后轴液压制动力Fhr转交由ABS调节(常规技术);
(2)如果ABS未工作,判断实际制动力Fba是否满足驾驶员的制动要求的阈值F(一般该阈值设置为:实际制动力Fba接近需求制动力Fbr即认为满足驾驶员的制动要求,本实施例中,设定阈值F为需求制动力Fbr的90%,便认为其满足驾驶员的要求);
(21)如果Fba大于0.9Fbr,则:
(211)如果前轴车轮滑移率Sf小于或等于滑移率阈值S(一般滑移率阈值S的取值范围为0.15~0.2,本实施例中设为0.15),则前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm均与上一时刻相同;
(212)如果前轴车轮滑移率Sf大于0.15,则减小电动机制动力Fm,增加后轴液压制动力Fhr,使前轴车轮滑移率Sf减小;
(22)如果Fba小于或等于0.9Fbr,则:
(221)如果前轴车轮滑移率Sf小于或等于0.15,计算电动机转矩极限(根据电动机功率、车速、电池SOC等因素确定),若电动机转矩小于转矩极限,则增加电动机制动力Fm;
(222)如果前轴车轮滑移率Sf小于或等于0.15,但是电动机转矩已达到计算出的转矩极限不可再增加,则调节前轴液压制动力Fhf与后轴液压制动力Fhr,使工作点(Fm+Fhf,Fhr)与I曲线(为本领域熟知的理想的前、后制动力分配曲线)的距离最短;
(223)如果前轴车轮滑移率Sf大于0.15,则减小电动机制动力Fm,增加后轴液压制动力Fhr,使前轴车轮滑移率Sf减小;
4)重复执行步骤2)-3),直到制动踏板被松开,制动结束。
本发明用于后轴电驱动汽车的制动能量回馈控制方法实施例2如图2所示,包括以下步骤:
1)收到来自制动主缸的压力信号(当驾驶员踩下制动踏板时产生的压力信号),制动开始;
2)采集制动主缸压力、制动踏板行程、电动机转矩、车轮转速和车辆加速度等信号,计算驾驶员的需求制动力Fbr、车辆的实际制动力Fba、后轴车轮滑移率Sr(属于本领域常规技术);
3)调节前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm。具体调节为:
(1)如果ABS在工作(即发生车轮抱死),则电动机制动力Fm=0,前轴液压制动力Fhf与后轴液压制动力Fhr转交由ABS调节;
(2)如果ABS未工作,判断实际制动力Fba是否满足驾驶员的制动要求的阈值F(本实施例设定阈值F与实施例1相同);
(21)如果Fba大于0.9Fbr,则:
(211)如果后轴车轮滑移率Sr小于或等于滑移率阈值(本实施例的滑移率阈值S的取值范围为0.15~0.2,与实施例1相同),则前轴液压制动力Fhf、后轴液压制动力Fhr与电动机制动力Fm均与上一时刻相同;
(212)如果后轴车轮滑移率Sr大于0.15,则减小电动机制动力Fm,增加前轴液压制动力Fhf,使后轴车轮滑移率Sr减小;
(22)如果Fba小于或等于0.9Fbr,则:
(221)如果后轴车轮滑移率Sr小于或等于0.15,计算电动机转矩极限(根据电动机功率、车速、电池SOC等因素确定),若电动机转矩小于转矩极限,则增加电动机制动力Fm;
(222)如果前轴车轮滑移率Sf小于或等于0.15,但是电动机转矩已达到计算出的转矩极限不可再增加,则调节前轴液压制动力Fhf与后轴液压制动力Fhr,使工作点(Fhf,Fm+Fhr)与I曲线(为本领域熟知的理想的前、后制动力分配曲线)的距离最短;
(223)如果后轴车轮滑移率Sr大于0.15,则减小电动机制动力Fm,增加前轴液压制动力Fhf,使后轴车轮滑移率Sr减小;
4)重复执行步骤2)-3),直到制动踏板被松开,制动结束。
本发明的控制方法可通过在控制器中编程实现。
一种电动汽车的制动能量回馈控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0