

IPC分类号 : B25J11/00,B25J9/10,B25J9/16,B25J15/04,B25J17/00,B22D43/00









专利摘要
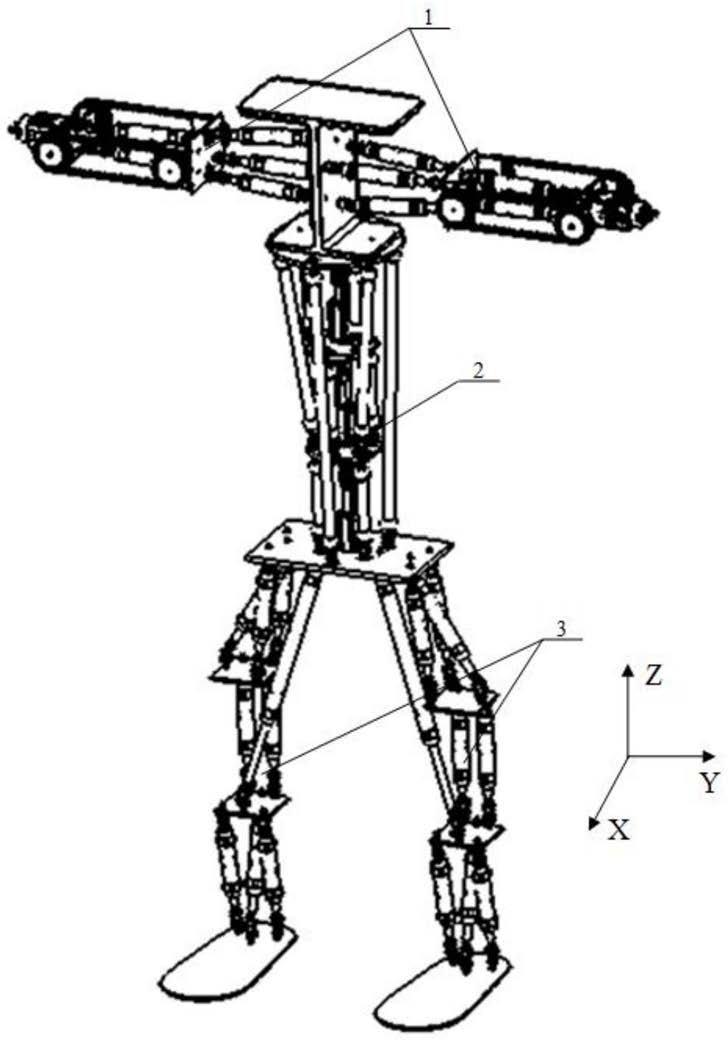
本发明公开了一种锌合金扒渣机器人及其工作方法,包括同步移动装置(1),同步移动装置(1)的顶部通过机械臂支架(2)连接有机械臂基座(3),机械臂基座(3)上安装有机械臂大臂装置(4),机械臂大臂装置(4)的顶端连接有机械臂小臂装置(5),机械臂小臂装置(5)的顶端安装有机械臂腕部(6),机械臂腕部(6)的前端设有扒渣板(7)。本发明能够进行自动扒渣,解放劳动力和节约了成本,并具有扒渣效果好的特点。
权利要求
1.一种锌合金扒渣机器人,其特征在于:包括同步移动装置(1),同步移动装置(1)的顶部通过机械臂支架(2)连接有机械臂基座(3),机械臂基座(3)上安装有机械臂大臂装置(4),机械臂大臂装置(4)的顶端连接有机械臂小臂装置(5),机械臂小臂装置(5)的顶端安装有机械臂腕部(6),机械臂腕部(6)的前端设有扒渣板(7);所述同步移动装置(1)包括同步移动壳体(11),同步移动壳体(11)上通过螺栓固定有同步移动盖板(12),同步移动盖板(12)上固定有第一电机(13);所述同步移动壳体(11)和同步移动盖板(12)之间安装有竖直的第一主动轴(16)和第一从动轴(17),第一电机(13)的输出轴与第一主动轴(16)的轴端传动连接,第一主动轴(16)自下而上安装有主动同步带轮(111)和第一不完全齿轮(18);所述第一从动轴(17)自下而上安装有从动同步带轮(112)和第二不完全齿轮(19);所述同步移动壳体(11)内固定有位于第一主动轴(16)和第一从动轴(17)之间的直线滑轨(114),直线滑轨(114)上设有沿着直线滑轨(114)滑动的直线滑块(115),所述直线滑块(115)的顶部固定有双面齿条(116),所述双面齿条(116)的一个侧面的上的齿条与第一不完全齿轮(18)配合,双面齿条(116)的另一个侧面的上的齿条与第二不完全齿轮(19)配合,所述双面齿条(116)与第一不完全齿轮(18)和第二不完全齿轮(19)不同时啮合;所述主动同步带轮(111)和从动同步带轮(112)之间套设有同步带(113),所述同步移动盖板(12)上设有与直线滑轨(114)平行的滑槽,所述机械臂支架(2)的底部穿过滑槽与双面齿条(116)的顶部固定连接;所述机械臂腕部(6)上设有方形滑槽(8),所述扒渣板(7)端部伸入到方形滑槽(8)内并可沿着方形滑槽(8)移动,方形滑槽(8)的内壁上装有用于固定扒渣板(7)的紧定螺钉;所述机械臂基座(3)包括固定安装在机械臂支架(2)顶部的基座壳体(31),基座壳体(31)的内腔底部安装有第二电机(32)以及减速器(33),减速器(33)的输出轴上安装有第一锥齿轮(34),所述基座壳体(31)在位于第一锥齿轮(34)的上方设有水平横向设置的第二主动轴(35),所述第二主动轴(35)上依次安装有第一直齿轮(37)和第二锥齿轮(311),第二锥齿轮(311)与第一锥齿轮(34)相啮合传动,所述基座壳体(31)在位于第二主动轴(35)的上方设有第二从动轴(313),第二从动轴(313)上依次安装有第二直齿轮(314)和第一法兰(315),第一法兰(315)的末端与机械臂大臂装置(4)的末端连接,用于控制机械臂大臂装置(4)的旋转;所述第一直齿轮(37)和第二直齿轮(314)啮合传动。
2.根据权利要求1所述的锌合金扒渣机器人,其特征在于,所述机械臂大臂装置(4)包括与第一法兰(315)连接的大臂壳体(41),大臂壳体(41)的内腔两端分别安装有第三从动轴(44)和第四从动轴(46),所述第三从动轴(44)上依次安装有第二从动链轮(43)和第一从动链轮(317),所述第四从动轴(46)上依次安装有第三从动链轮(47)和第二法兰(48),所述第二法兰(48)的末端与机械臂小臂装置(5)连接,用于控制机械臂小臂装置(5)的旋转;所述机械臂大臂装置(4)与机械臂基座(3)之间设有二级传动机构,二级转动机构包括设置在第二主动轴(35)上的第一主动链轮(312)和设置在基座壳体(31)内的第一张紧轮(316),所述第一主动链轮(312)、第一张紧轮(316)和第一从动链轮(317)之间设有第一链条(318);所述大臂壳体(41)内设有第二张紧轮(45),所述第二从动链轮(43)、第二张紧轮(45)和第三从动链轮(47)之间套设有第二链条(49)。
3.根据权利要求2所述的锌合金扒渣机器人,其特征在于,所述机械臂小臂装置(5)包括与第二法兰(48)固定连的小臂壳体(51),小臂壳体(51)的两端分别设有第三主动轴(52)和第五从动轴(54),所述第三主动轴(52)上设有第二主动链轮(53),所述第五从动轴(54)上设有第四从动链轮(56);所述小臂壳体(51)内设有第三张紧轮(57),所述第二主动链轮(53)、第三张紧轮(57)和第四从动链轮(56)之间设有第三链条(58);所述大臂壳体(41)的顶端设有第三电机(410),所述第三电机(410)的输出轴与第三主动轴(52)传动连接,所述机械臂腕部(6)安装在第五从动轴(54)的轴端。
4.根据权利要求3所述的锌合金扒渣机器人的工作方法,其特征在于,该锌合金扒渣机器人的工作流程是:初始状态下,同步移动装置固定安装在地面上,同步移动装置内部的直线滑块位于直线滑轨的一端,双面齿条与第一不完全齿轮啮合,与第二不完全齿轮脱离,机械臂大臂装置和机械臂小臂装置收回,近似竖直放置状态,扒渣板在机械臂腕部的控制下与机械臂小臂装置平行;工作时,第三电机启动,通过第二主动链轮和第四从动链轮的传动,控制机械臂腕部下放,直到扒渣板接触锌合金融液一端;随后,第一电机启动,驱动第一主动轴,第一不完全齿轮与双面齿条啮合传动,驱动双面齿条向直线滑轨另一端移动,带动扒渣板水平直线移动,配合锌合金生产线的移动速率;同时第二电机启动,通过第一锥齿轮和第二锥齿轮的传动,驱动第二主动轴转动,一方面经过第一直齿轮和第二直齿轮的传动驱动第二从动轴的转动,进而驱动机械臂大臂装置下放;另一方面经过第一主动链轮和第一从动链轮,以及第二从动链轮和第三从动链轮的二级传动,驱动第四从动轴的转动,从而驱动机械臂小臂装置上提;其中第三电机转动,保证机械臂腕部与合金生产线保持相对静止状态,直到扒渣板移动到合金融液的另一端,机械臂腕部快速上提,将锌渣抛出,完成扒渣工作;之后,第二电机反转,将机械臂大臂装置和机械臂小臂装置收回,在同步移动装置中,第一不完全齿轮与双面齿条脱离,第二不完全齿轮与双面齿条啮合,通过同步带传动驱动第一从动轴转动,从而带动双面齿条反向移动,恢复原位。
说明书
技术领域
本发明涉及合金生产技术领域,特别涉及一种锌合金扒渣机器人及其工作方法。
背景技术
在锌合金原料的生产过程中,锌合金表面会被氧化而产生一定量的锌渣,为了保证锌合金的质量,在冷却成型之前都需要除去表面浮渣。现有的锌合金铸锭生产线已经实现了从融化反应、浇注到冷却成型、落料的自动化生产,但是扒渣工作依旧由人工完成,此工位不仅劳动强度大、工作环境差,而且人工产品质量难以提升。对于这种非技能型工位,使用工业自动化设备不仅能有效的提升制造业的生产效率和产品质量,更能在此类高危高劳动强度的作业中解放人力,节约成本。因此,设计一款能适合现有锌合金铸锭生产线的自动化扒渣机械设备,具有重大的意义。
发明内容
本发明的目的在于,提供一种锌合金扒渣机器人及其工作方法。本发明能够进行自动扒渣,解放劳动力和节约了成本,并具有扒渣效果好的特点。
本发明的技术方案:一种锌合金扒渣机器人,包括同步移动装置,同步移动装置的顶部通过机械臂支架连接有机械臂基座,机械臂基座上安装有机械臂大臂装置,机械臂大臂装置的顶端连接有机械臂小臂装置,机械臂小臂装置的顶端安装有机械臂腕部,机械臂腕部的前端设有扒渣板;所述同步移动装置包括同步移动壳体,同步移动壳体上通过螺栓固定有同步移动盖板,同步移动盖板上固定有第一电机;所述同步移动壳体和同步移动盖板之间安装有竖直的第一主动轴和第一从动轴,第一电机的输出轴与第一主动轴的轴端传动连接,第一主动轴上自下而上安装有主动同步带轮和第一不完全齿轮;所述第一从动轴自下而上安装有从动同步带轮和第二不完全齿轮;所述同步移动壳体内固定有位于第一主动轴和第一从动轴之间的直线滑轨,直线滑轨上设有沿着直线滑轨滑动的直线滑块,所述直线滑块的顶部固定有双面齿条,所述双面齿条的一个侧面的上的齿条与第一不完全齿轮配合,双面齿条的另一个侧面的上的齿条与第二不完全齿轮配合,所述双面齿条与第一不完全齿轮和第二不完全齿轮不同时啮合;所述主动同步带轮和从动同步带轮之间套设有同步带,所述同步移动盖板上设有与直线滑轨平行的滑槽,所述机械臂支架的底部穿过滑槽与双面齿条的顶部固定连接。
前述的锌合金扒渣机器人中,所述机械臂基座包括固定安装在机械臂支架顶部的基座壳体,基座壳体的内腔底部安装有第二电机以及减速器,减速器的输出轴上安装有第一锥齿轮,所述基座壳体在位于第一锥齿轮的上方设有水平横向设置的第二主动轴,所述第二主动轴上依次安装有第一直齿轮和第二锥齿轮,第二锥齿轮与第一锥齿轮相啮合传动,所述基座壳体在位于第二主动轴的上方设有第二从动轴,第二从动轴上依次安装有第二直齿轮和第一法兰,第一法兰的末端与机械臂大臂装置的末端连接,用于控制机械臂大臂装置的旋转;所述第一直齿轮和第二直齿轮啮合传动。
前述的锌合金扒渣机器人中,所述机械臂大臂装置包括与第一法兰连接的大臂壳体,大臂壳体的内腔两端分别安装有第三从动轴和第四从动轴,所述第三从动轴上依次安装有第二从动链轮和第一从动链轮,所述第四从动轴上依次安装有第三从动链轮和第二法兰,所述第二法兰的末端与机械臂小臂装置连接,用于控制机械臂小臂装置的旋转;所述机械臂大臂装置与机械臂基座之间设有二级传动机构,二级转动机构包括设置在第二主动轴上的第一主动链轮和设置在基座壳体内的第一张紧轮,所述第一主动链轮、第一张紧轮和第一从动链轮之间设有第一链条;所述大臂壳体内设有第二张紧轮,所述第二从动链轮、第二张紧轮和第三从动链轮之间套设有有第二链条。
前述的锌合金扒渣机器人中,所述机械臂小臂装置包括与第二法兰固定连的小臂壳体,小臂壳体的两端分别设有第三主动轴和第五从动轴,所述第三主动轴上设有第二主动链轮,所述第五从动轴上设有安装有第四从动链轮;所述小臂壳体内设有第三张紧轮,所述第二主动链轮、第三张紧轮和第四从动链轮之间设有第三链条;所述大臂壳体的顶端设有第三电机,所述第三电机的输出轴与第三主动轴传动连接,所述机械臂腕部安装在第五从动轴的轴端。
前述的锌合金扒渣机器人中,所述机械臂腕部上设有方形滑槽,所述扒渣板端部伸入到方形滑槽内并可沿着方形滑槽移动,方形滑槽的内壁上装有用于固定扒渣板的紧定螺钉。
前述的锌合金扒渣机器人的工作方法是:初始状态下,同步移动装置固定安装在地面上,同步移动装置内部的直线滑块位于直线滑轨的一端,双面齿条与第一不完全齿轮啮合,与第二不完全齿轮脱离,机械臂大臂装置和机械臂小臂装置收回,近似竖直放置状态,扒渣板在机械臂腕部的控制下与机械臂小臂装置平行;工作时,第三电机启动,通过第二主动链轮和第四从动链轮的传动,控制机械臂腕部下放,直到扒渣板接触锌合金融液一端;随后,第一电机启动,驱动第一主动轴,第一不完全齿轮与双面齿条啮合传动,驱动双面齿条向直线滑轨另一端移动,带动扒渣板水平直线移动,配合锌合金生产线的移动速率;同时第二电机启动,通过第一锥齿轮和第二锥齿轮的传动,驱动第二主动轴转动,一方面经过第一直齿轮和第二直齿轮的传动驱动第二从动轴的转动,进而驱动机械臂大臂装置下放;另一方面经过第一主动链轮和第一从动链轮,以及第二从动链轮和第三从动链轮的二级传动,驱动第四从动轴的转动,从而驱动机械臂小臂装置上提;其中第三电机转动,保证机械臂腕部与合金生产线保持相对静止状态,直到扒渣板移动到合金融液的另一端,机械臂腕部快速上提,将锌渣抛出,完成扒渣工作;之后,第二电机反转,将机械臂大臂装置和机械臂小臂装置收回,在同步移动装置中,第一不完全齿轮与双面齿条脱离,第二不完全齿轮与双面齿条啮合,通过同步带传动驱动第一从动轴转动,从而带动双面齿条反向移动,恢复原位。
与现有技术相比,本发明具有以下优点:
1、本发明通过同步移动装置,机械臂基座,机械臂大臂装置,机械臂小臂装置和机械臂腕部的配合,实现锌合金浇筑生产线上自动完成扒渣工作,无需人工辅助,具有体积小巧,扒渣效果好,成本低的特点。本发明通过同步移动装置带动机械臂基座,机械臂大臂装置,机械臂小臂装置和机械臂腕部,做往复的直线运动,保证在工作时,机械臂与锌合金浇筑生产线的水平移动方向相对静止,确保了扒渣的稳定性。
2、本发明通过设置特定的同步移动装置,来实现机械臂的自动往复直线运动,通过改变主动同步带轮与从动同步带轮的传动比可以调整往复移动的快慢,大大减少复位所需时间,从而延长工作时间,提高扒渣质量,主要是通过双面齿条与第一不完全齿轮和第二不完全齿轮不同时啮合,来对推动双面齿条带动直线滑块沿着直线滑轨进行往复移动,进而带动机械臂基座,机械臂大臂装置,机械臂小臂装置和机械臂腕部,做往复的直线运动。
3、本发明可通过第二电机同时驱动机械臂大臂装置和机械臂小臂装置,保证机械臂小臂装置头部做水平直线运动,同时减少驱动电机数量,降低成本和控制难度,第二电机启动,通过第一锥齿轮和第二锥齿轮的传动,驱动第二主动轴转动,一方面经过第一直齿轮和第二直齿轮的传动驱动第二从动轴的转动,进而驱动机械臂大臂装置下放;另一方面经过第一主动链轮和第一从动链轮,以及第二从动链轮和第三从动链轮的二级传动,驱动第四从动轴的转动,从而驱动机械臂小臂装置上提,实现对驱动机械臂大臂装置和机械臂小臂装置的同时驱动。
4、本发明通过机械臂腕部和扒渣板的配合,通过方形滑槽和紧定螺钉可以适度调节扒渣板距离生产线的距离,从而更具有通用性。
5、本发明中的该锌合金扒渣机器人的工作流程是,初始状态下,同步移动装置固定安装在地面上,同步移动装置内部的直线滑块位于直线滑轨的一端,双面齿条与第一不完全齿轮啮合,与第二不完全齿轮脱离,机械臂大臂装置和机械臂小臂装置收回,近似竖直放置状态,扒渣板在机械臂腕部的控制下与机械臂小臂装置平行;工作时,第三电机启动,通过第二主动链轮和第四从动链轮的传动,控制机械臂腕部下放,直到扒渣板接触锌合金融液一端;随后,第一电机启动,驱动第一主动轴,第一不完全齿轮与双面齿条啮合传动,驱动双面齿条向直线滑轨另一端移动,带动扒渣板水平直线移动,配合锌合金生产线的移动速率;同时第二电机启动,通过第一锥齿轮和第二锥齿轮的传动,驱动第二主动轴转动,一方面经过第一直齿轮和第二直齿轮的传动驱动第二从动轴的转动,进而驱动机械臂大臂装置下放;另一方面经过第一主动链轮和第一从动链轮,以及第二从动链轮和第三从动链轮的二级传动,驱动第四从动轴的转动,从而驱动机械臂小臂装置上提;其中第三电机转动,保证机械臂腕部与合金生产线保持相对静止状态,直到扒渣板移动到合金融液的另一端,机械臂腕部快速上提,将锌渣抛出,完成扒渣工作;之后,第二电机反转,将机械臂大臂装置和机械臂小臂装置收回,在同步移动装置中,第一不完全齿轮与双面齿条脱离,第二不完全齿轮与双面齿条啮合,通过同步带传动驱动第一从动轴转动,从而带动双面齿条反向移动,恢复原位。
附图说明
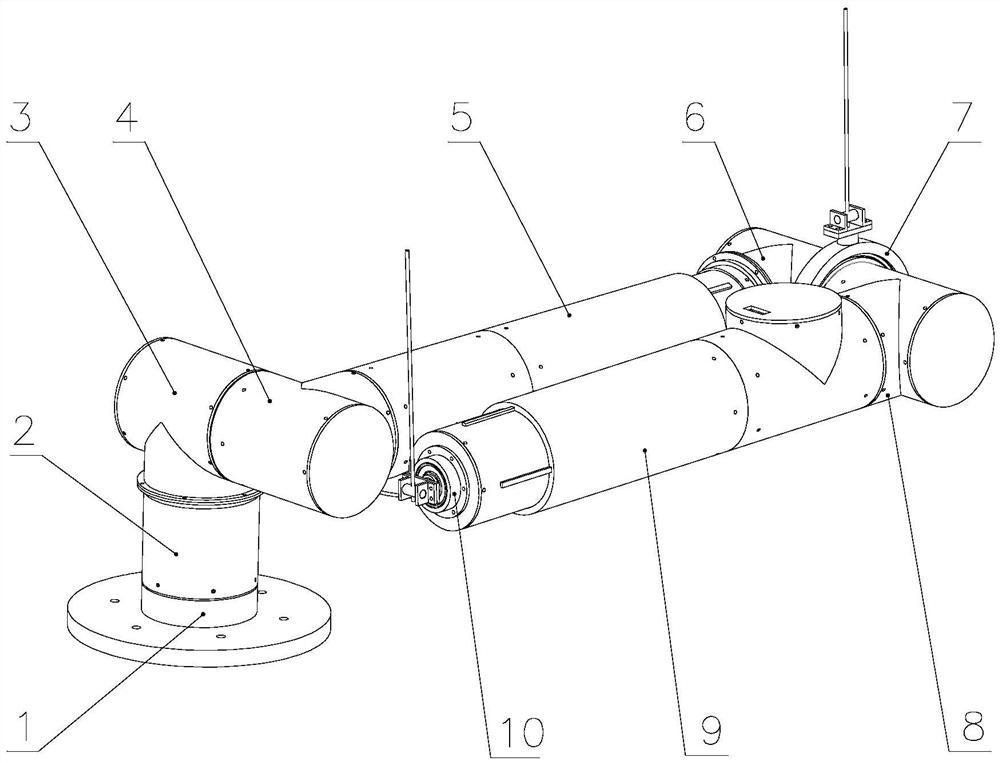
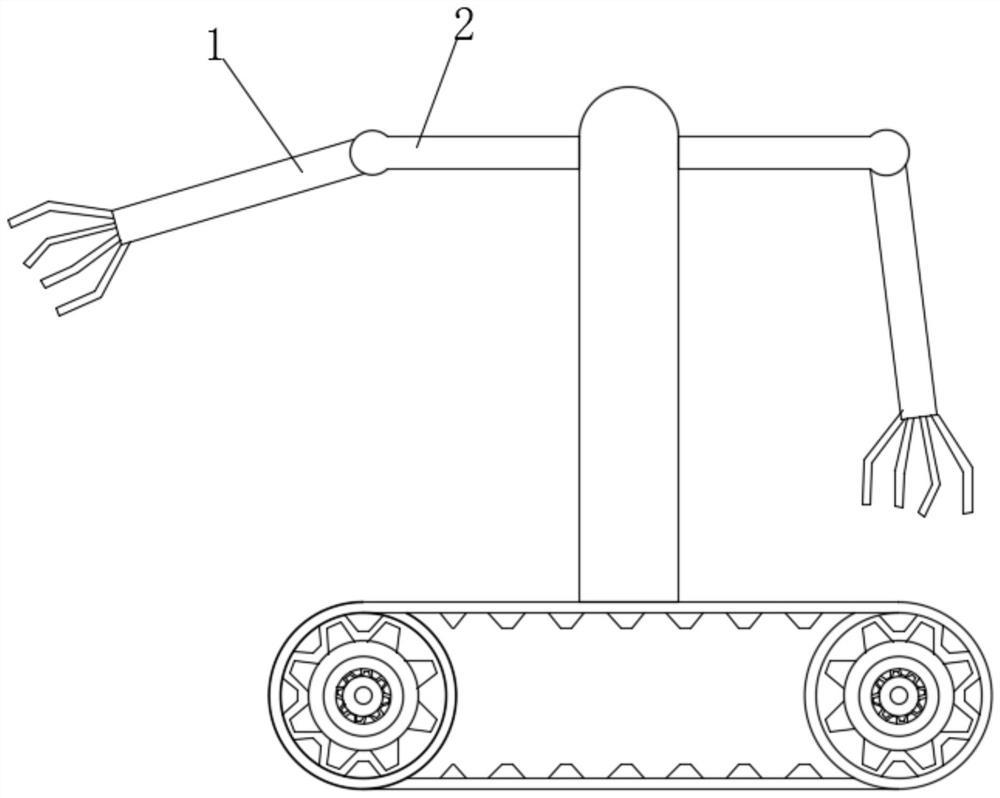
图1是本发明的结构示意图;
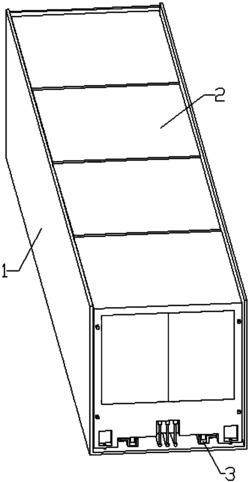
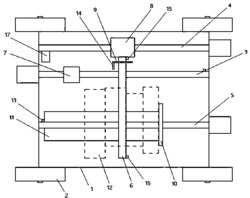
图2是同步移动装置的结构示意图;
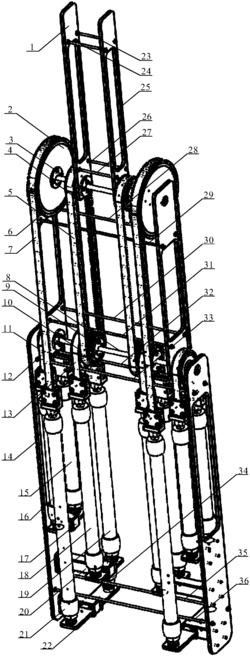
图3是机械臂基座的结构示意图;
图4是机械臂基座与机械臂大臂装置连接处的结构示意图;
图5是机械臂大臂装置的结构示意图;
图6是机械臂小臂装置的结构示意图;
图7是机械臂腕部的结构示意图。
1、同步移动装置;11、同步移动壳体;12、同步移动盖板;13、第一电机;16、第一主动轴;17、第一从动轴;18、第一不完全齿轮;19、第二不完全齿轮;111、主动同步带轮;112、从动同步带轮;113、同步带;114、直线滑轨;115、直线滑块;116、双面齿条;2、机械臂支架;3、机械臂基座;31、基座壳体;32、第二电机;33、减速器;34、第一锥齿轮;35、第二主动轴;37、第一直齿轮;311、第二锥齿轮;312、第一主动链轮;313、第二从动轴;314、第二直齿轮;315、第一法兰;316、第一张紧轮;317、第一从动链轮;318、第一链条;4、机械臂大臂装置;41、大臂壳体;43、第二从动链轮;44、第三从动轴;45、第二张紧轮;46、第四从动轴;47、第三从动链轮;48、第二法兰;49、第二链条;410、第三电机;5、机械臂小臂装置;51、小臂壳体;52、第三主动轴;53、第二主动链轮;54、第五从动轴;56、第四从动链轮;57、第三张紧轮;58、第三链条;6、机械臂腕部;7、扒渣板;8、方形滑槽。
具体实施方式
下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
实施例:一种锌合金扒渣机器人,如图1-7所示,包括同步移动装置1,同步移动装置1的顶部通过机械臂支架2连接有机械臂基座3,机械臂基座3上安装有机械臂大臂装置4,机械臂大臂装置4的顶端连接有机械臂小臂装置5,机械臂小臂装置5的顶端安装有机械臂腕部6,机械臂腕部6的前端设有扒渣板7。本发明通过同步移动装置1,机械臂基座3,机械臂大臂装置4,机械臂小臂装置5和机械臂腕部6的配合,实现锌合金浇筑生产线上自动完成扒渣工作,无需人工辅助,具有体积小巧,扒渣效果好,成本低的特点。本发明通过同步移动装置1带动机械臂基座3,机械臂大臂装置4,机械臂小臂装置5和机械臂腕部6,做往复的直线运动,保证在工作时,机械臂与锌合金浇筑生产线的水平移动方向相对静止,确保了扒渣的稳定性;机械臂基座3中的驱动机构,可用于同时驱动机械臂大臂装置4和机械臂小臂装置5,通过配合机械传动,可以保证机械臂小臂装置5的头部始终在一条水平直线上运动;其中机械臂腕部6的第三电机410安装在机械臂大臂装置4的头部,减少了机械臂的负载,同时保证工作时,扒渣板7与融液液面的角度不变,确保扒渣质量,扒渣后,复位的同时,旋转机械臂腕部6将废渣抛出,节省工作时间。
如图2所示,所述同步移动装置1包括同步移动壳体11,同步移动壳体11上通过螺栓固定有同步移动盖板12,同步移动盖板12上固定有第一电机13;所述同步移动壳体11和同步移动盖板12之间安装有竖直的第一主动轴16和第一从动轴17,第一电机13的输出轴与第一主动轴16的轴端传动连接,第一主动轴16上自下而上安装有主动同步带轮111和第一不完全齿轮18;所述第一从动轴17自下而上安装有从动同步带轮112和第二不完全齿轮19;所述同步移动壳体11内固定有位于第一主动轴16和第一从动轴17之间的直线滑轨114,直线滑轨114上设有沿着直线滑轨114滑动的直线滑块115,所述直线滑块115的顶部固定有双面齿条116,所述双面齿条116的一个侧面的上的齿条与第一不完全齿轮18配合,双面齿条116的另一个侧面的上的齿条与第二不完全齿轮19配合,所述双面齿条116与第一不完全齿轮18和第二不完全齿轮19不同时啮合;所述主动同步带轮111和从动同步带轮112之间套设有同步带113,所述同步移动盖板12上设有与直线滑轨114平行的滑槽,所述机械臂支架2的底部穿过滑槽与双面齿条116的顶部固定连接,通过设置特定的同步移动装置1,来实现机械臂的自动往复直线运动,通过改变主动同步带轮111与从动同步带轮112的传动比可以调整往复移动的快慢,大大减少复位所需时间,从而延长工作时间,提高扒渣质量,主要是通过双面齿条116与第一不完全齿轮18和第二不完全齿轮19不同时啮合,来对推动双面齿条116带动直线滑块115沿着直线滑轨114进行往复移动,进而带动机械臂基座3,机械臂大臂装置4,机械臂小臂装置5和机械臂腕部6做往复的直线运动。
如图3、图4和图5所示,所述机械臂基座3包括固定安装在机械臂支架2顶部的基座壳体31,基座壳体31的内腔底部安装有第二电机32以及减速器33,减速器33的输出轴上安装有第一锥齿轮34,所述基座壳体31在位于第一锥齿轮34的上方设有水平横向设置的第二主动轴35,所述第二主动轴35上依次安装有第一直齿轮37和第二锥齿轮311,第二锥齿轮311与第一锥齿轮34相啮合传动,所述基座壳体31在位于第二主动轴35的上方设有第二从动轴313,第二从动轴313上依次安装有第二直齿轮314和第一法兰315,第一法兰315的末端与机械臂大臂装置4的末端连接,用于控制机械臂大臂装置4的旋转;所述第一直齿轮37和第二直齿轮314啮合传动。所述机械臂大臂装置4包括与第一法兰315连接的大臂壳体41,大臂壳体41的内腔两端分别安装有第三从动轴44和第四从动轴46,所述第三从动轴44上依次安装有第二从动链轮43和第一从动链轮317,所述第四从动轴46上依次安装有第三从动链轮47和第二法兰48,所述第二法兰48的末端与机械臂小臂装置5连接,用于控制机械臂小臂装置5的旋转;所述机械臂大臂装置4与机械臂基座3之间设有二级传动机构,二级转动机构包括设置在第二主动轴35上的第一主动链轮312和设置在基座壳体31内的第一张紧轮316,所述第一主动链轮312、第一张紧轮316和第一从动链轮317之间设有第一链条318;所述大臂壳体41内设有第二张紧轮45,所述第二从动链轮43、第二张紧轮45和第三从动链轮47之间套设有有第二链条49。本发明可通过第二电机32同时驱动机械臂大臂装置4和机械臂小臂装置5,保证机械臂小臂装置5头部做水平直线运动,同时减少驱动电机数量,降低成本和控制难度,第二电机32启动,通过第一锥齿轮34和第二锥齿轮311的传动,驱动第二主动轴35转动,一方面经过第一直齿轮37和第二直齿轮314的传动驱动第二从动轴313的转动,进而驱动机械臂大臂装置4下放;另一方面经过第一主动链轮312和第一从动链轮317,以及第二从动链轮43和第三从动链轮47的二级传动,驱动第四从动轴46的转动,从而驱动机械臂小臂装置5上提,实现对驱动机械臂大臂装置4和机械臂小臂装置5的同时驱动。要求机械臂小臂装置5与机械臂大臂装置4有效长度相等,且机械臂小臂装置5的头部和机械臂大臂装置4的末端在同一水平面上,机械臂小臂装置5的转速是机械臂大臂装置4的两倍且转向相反。
如图6所示,所述机械臂小臂装置5包括与第二法兰48固定连的小臂壳体51,小臂壳体51的两端分别设有第三主动轴52和第五从动轴54,所述第三主动轴52上设有第二主动链轮53,所述第五从动轴54上设有安装有第四从动链轮56;所述小臂壳体51内设有第三张紧轮57,所述第二主动链轮53、第三张紧轮57和第四从动链轮56之间设有第三链条58;所述大臂壳体41的顶端设有第三电机410,所述第三电机410的输出轴与第三主动轴52传动连接,所述机械臂腕部6安装在第五从动轴54的轴端,通过第三电机410驱动第三主动轴52,进而通过第三链条58带动第五从动轴54转动,进而带动机械臂腕部6转动,进行扒渣动作。
如图7所示,所述机械臂腕部6上设有方形滑槽8,所述扒渣板7端部伸入到方形滑槽8内并可沿着方形滑槽8移动,方形滑槽8的内壁上装有用于固定扒渣板7的紧定螺钉,通过机械臂腕部6和扒渣板7的配合,通过方形滑槽8和紧定螺钉可以适度调节扒渣板7距离生产线的距离,从而更具有通用性。
该锌合金扒渣机器人的工作方法是:初始状态下,同步移动装置1固定安装在地面上,同步移动装置1内部的直线滑块115位于直线滑轨114的一端,双面齿条116与第一不完全齿轮18啮合,与第二不完全齿轮19脱离,机械臂大臂装置4和机械臂小臂装置5收回,近似竖直放置状态,扒渣板7在机械臂腕部6的控制下与机械臂小臂装置5平行;工作时,第三电机410启动,通过第二主动链轮53和第四从动链轮56的传动,控制机械臂腕部6下放,直到扒渣板7接触锌合金融液一端;随后,第一电机13启动,驱动第一主动轴16,第一不完全齿轮18与双面齿条116啮合传动,驱动双面齿条116向直线滑轨114另一端移动,带动扒渣板7水平直线移动,配合锌合金生产线的移动速率;同时第二电机32启动,通过第一锥齿轮34和第二锥齿轮311的传动,驱动第二主动轴35转动,一方面经过第一直齿轮37和第二直齿轮314的传动驱动第二从动轴313的转动,进而驱动机械臂大臂装置4下放;另一方面经过第一主动链轮312和第一从动链轮317,以及第二从动链轮43和第三从动链轮47的二级传动,驱动第四从动轴46的转动,从而驱动机械臂小臂装置5上提;其中第三电机410转动,保证机械臂腕部6与合金生产线保持相对静止状态,直到扒渣板7移动到合金融液的另一端,机械臂腕部6快速上提,将锌渣抛出,完成扒渣工作;之后,第二电机32反转,将机械臂大臂装置4和机械臂小臂装置5收回,在同步移动装置1中,第一不完全齿轮18与双面齿条116脱离,第二不完全齿轮19与双面齿条116啮合,通过同步带113传动驱动第一从动轴17转动,从而带动双面齿条116反向移动,恢复原位。
一种锌合金扒渣机器人及其工作方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0