








专利摘要
本发明提出一种航空器绿色巡航轨迹的动态记忆规划方法,所述方法包括:获取航空器巡航航路的位置信息及气象数据;航路离散化处理,定义各阶段决策变量、决策边界和状态值集合;创建记忆备忘录并进行初始化;动态记忆递推得出最优巡航轨迹。本发明综合考虑经济目标和环保目标,通过动态的递推流程和记忆备忘录的使用,解决了现有方法不能兼顾求解效率和优化质量的技术问题,为实际应用中的航空器绿色巡航轨迹规划提供更科学、更有效的工具。
权利要求
1.一种航空器巡航轨迹的绿色动态记忆规划方法,其特征在于,所述方法包括:
获取航空器巡航航路的位置信息及气象数据;
根据位置信息对航路进行离散化处理,将航路划分为多个航段;
获取各航段的决策变量、决策边界和状态值;
将决策变量、决策边界和状态值代入动态记忆递推算法,计算得到最优巡航轨迹;
所述动态记忆递推算法为:
a、创建状态累积值备忘录和中间点值备忘录;
b、对航段进行初始化,包括航段序号、巡航高度和速度的初始化;
c、从中间点值备忘录中查找航空器所在航段的中间点值,若存在则提取中间点值,转到步骤f,若不存在则转到步骤e;
e、计算航段对应的中间点值并存入中间点值备忘录;
f、递推到下一航段,重复步骤c,直至到达最大航段序号数J,其中间点值对应的各航段决策变量,即为绿色巡航轨迹航段决策序列;
g、获取绿色巡航轨迹所有航段决策序列对应的决策节点,得到航空器绿色巡航轨迹。
2.根据权利要求1所述的一种航空器巡航轨迹的绿色动态记忆规划方法,其特征在于,所述航空器巡航航路的气象数据,包括航路上各决策点对应各个高度层的气象数据,是以航路周边的高空探测站样本为基础,使用反距离加权的空间插值方法获得的,空间插值方法具体的计算公式为:
其中,Z
3.根据权利要求1所述的一种航空器巡航轨迹的绿色动态记忆规划方法,其特征在于,所述决策变量为航空器在各航段上的巡航策略,包括运行高度层和速度;所述决策边界包括高度决策边界、速度决策边界和变化率决策边界。
4.根据权利要求3所述的一种航空器巡航轨迹的绿色动态记忆规划方法,其特征在于,所述高度决策边界为航空器在各航段巡航时不得超过对应管制空域内巡航高度层边界,高度决策边界通过如下公式表示:
其中,h
所述速度决策边界为航空器在各航段飞行时不得超出对应管制空域内巡航速度范围,速度决策边界通过如下公式表示:
其中,v
所述变化率决策边界为航空器在每次爬升或下降时只能改变一个高度层、每次速度增加或者减少量不得超过5m/s,变化率决策边界通过如下公式表示:
|h
|v
5.根据权利要求3所述的一种航空器巡航轨迹的绿色动态记忆规划方法,其特征在于,所述状态值为航空器在各航段上进行巡航运行时对应产生的经济成本与外部效应补偿成本之和,状态值通过如下公式表示:
其中,s
6.根据权利要求5所述的一种航空器巡航轨迹的绿色动态记忆规划方法,其特征在于,所述经济成本的计算公式为:
其中,
所述外部效应补偿成本的计算公式为:
其中,
7.根据权利要求1所述的一种航空器巡航轨迹的绿色动态记忆规划方法,其特征在于,所述中间点值的计算方法包括:
步骤1:根据决策变量在状态累积值备忘录中查找航空器所在航段的状态累积值,若存在则提取状态累积值,转到步骤3,若不存在则转到步骤2;
步骤2:计算决策节点的状态累积值并存入状态累积值备忘录;
步骤3:取航段各决策节点状态累积值中的最小值,作为航段的中间点值;
步骤4:将中间点值存入中间点值备忘录。
8.根据权利要求7所述的一种航空器巡航轨迹的绿色动态记忆规划方法,其特征在于,所述状态累积值的计算方法包括:
步骤1:对于决策节点的每个子节点,判断决策变量是否超出决策边界,若超出,记该子节点对应的状态累积值为Inf,转到步骤3:若不超出,转到步骤2;
步骤2:获取下一航段的中间点值,并与子节点的状态值相加,得出节点的状态累积值;
步骤3:将状态累积值存入状态累积值备忘录。
说明书
技术领域
本发明属于航空器轨迹规划领域,具体涉及一种航空器绿色巡航轨迹的动态记忆规划方法。
背景技术
近年来,航空运输业面临的机遇与挑战向整个行业提出了可持续运营的要求。随着全球生态环境治理进程的推进,在航空运输负外部性的显著体现下,绿色发展理念需要落实到民航实际生产运营中。针对航空器绿色巡航轨迹优化方法展开研究,有利于提高航空公司运行整体效益,提升现代民航可持续发展能力。
目前,针对航空器轨迹优化的研究,多是针对终端区进离场航迹展开,且经济性目标仍占主导。解决方法大体可以分为以非线性混合整数规划为代表的数学规划方法和以启发式算法为核心的仿生搜索方法两大类,主要是在求解效率与优化质量之间的权衡:非线性混合整数规划方法,在建模和求解过程中体现出明显的时间和空间复杂度,使得求解效率低,限制了其解决实际应用问题的能力;基于启发式算法的仿生搜索方法,得出的解往往不是全局最优,其质量依赖于算法参数的选择,且难以衡量其距最优解的偏离程度,使得优化质量难以评估和保证。
因此,现有成果的不足体现在:对飞行时间占比较长的巡航阶段关注较少,巡航轨迹优化目标中缺少对环境影响的全面考量,优化方法难以兼顾求解效率与优化质量。
发明内容
针对以上不足,本发明提供一种基于动态记忆规划的航空器绿色巡航轨迹规划方法,目的是解决现有巡航轨迹优化缺少对环境影响的全面考量,优化方法难以兼顾求解效率与优化质量的技术问题。
为达到上述目的,本发明采用的技术方案为:
一种航空器巡航轨迹的绿色动态记忆规划方法,所述方法包括:
获取航空器巡航航路的位置信息及气象数据;
根据位置信息对航路进行离散化处理,将航路划分为多个航段;
获取各航段的决策变量、决策边界和状态值;
将决策变量、决策边界和状态值代入动态记忆递推算法,计算得到最优巡航轨迹。
进一步的,所述航空器巡航航路的气象数据,包括航路上各决策点对应各个高度层的气象数据,是以航路周边的高空探测站样本为基础,使用反距离加权的空间插值方法获得的,空间插值方法具体的计算公式为:
其中,Z
进一步的,所述决策变量为航空器在各航段上的巡航策略,包括运行高度层和速度;所述决策边界包括高度决策边界、速度决策边界和变化率决策边界。
进一步的,所述高度决策边界为航空器在各航段巡航时不得超过对应管制空域内巡航高度层边界,高度决策边界通过如下公式表示:
其中,hj为航空器在第j航段巡航时的巡航高度, 为最低巡航高度, 为最高巡航高度;
所述速度决策边界为航空器在各航段飞行时不得超出对应管制空域内巡航速度范围,速度决策边界通过如下公式表示:
其中,vj为航空器在第j航段飞行时的巡航速度, 为最小巡航速度, 为最大巡航速度;
所述变化率决策边界为航空器在每次爬升或下降时只能改变一个高度层、每次速度增加或者减少量不得超过5m/s,变化率决策边界通过如下公式表示:
|hj+1-hj|≤600
|vj+1-vj|≤5。
进一步的,所述状态值为航空器在各航段上进行巡航运行时对应产生的经济成本与外部效应补偿成本之和,状态值通过如下公式表示:
其中,sj(hj,vj)为(hj,vj)决策下航段j的状态值, 和 分别为(hj,vj)决策下航空器在航段j上巡航产生的经济成本和外部效应补偿成本。
进一步的,所述经济成本的计算公式为:
其中, 为经济成本,CT为时间成本系数,lj为航段j的长度,CF为燃油成本系数,FCj为航空器在航段j的燃油消耗量;
所述外部效应补偿成本的计算公式为:
其中, 为外部效应补偿成本,SCC为国际社会碳排放成本; 和APGPcon(H)分别为CO2,NOx和凝结尾在时间水平H年下的绝对瞬时温变潜势; 为CO2排放指数; 为航空器在航段j上的NOx排放指数;β(hj)为航空器在航段j上航空器所在高度层hj的凝结尾生成系数。
进一步的,所述动态记忆递推算法为:
a、创建状态累积值备忘录和中间点值备忘录;
b、对航段进行初始化,包括航段序号、巡航高度和速度的初始化;
c、从中间点值备忘录中查找航空器所在航段的中间点值,若存在则提取中间点值,转到步骤f,若不存在则转到步骤e;
e、计算航段对应的中间点值并存入中间点值备忘录;
f、递推到下一航段,重复步骤c,直至到达最大航段序号数J,其中间点值对应的各航段决策变量,即为绿色巡航轨迹航段决策序列;g、获取绿色巡航轨迹所有航段决策序列对应的决策节点,得到航空器绿色巡航轨迹。
进一步的,所述中间点值的计算方法包括:
步骤1:根据决策变量在状态累积值备忘录中查找航空器所在航段的状态累积值,若存在则提取状态累积值,转到步骤3,若不存在则转到步骤2;
步骤2:计算决策节点的状态累积值并存入状态累积值备忘录;
步骤3:取航段各决策节点状态累积值中的最小值,作为航段的中间点值;
步骤4:将中间点值存入中间点值备忘录。
进一步的,所述状态累积值的计算方法包括:
步骤1:对于决策节点的每个子节点,判断决策变量是否超出决策边界,若超出,记该子节点对应的状态累积值为Inf,转到步骤3:若不超出,转到步骤2;
步骤2:获取下一航段的中间点值,并与子节点的状态值相加,得出节点的状态累积值;
步骤3:将状态累积值存入状态累积值备忘录。
一种航空器绿色巡航轨迹动态记忆规划系统,所述系统包括:
数据获取模块:用于获取航空器巡航航路位置及气象数据;
处理模块:用于根据位置信息对航路进行离散化处理,将航路划分为多个航段;
获取模块:用于获取各航段的决策变量、决策边界和状态值;
计算模块:用于将决策变量、决策边界和状态值代入动态记忆递推算法,计算得到最优巡航轨迹。
一种航空器绿色巡航轨迹动态记忆规划系统,所述系统包括处理器和存储介质;
所述存储介质用于存储指令;
所述处理器用于根据所述指令进行操作以执行上述所述方法的步骤。
计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述所述方法的步骤。
与现有技术相比,本发明所达到的有益效果是:
本发明通过动态记忆递推算法,利用离散动态系统的最优子结构性质,通过动态的递推流程,求得全局最优解,通过备忘录的存储功能,减少冗余和不必要的运算,解决了现有轨迹规划方法不能兼顾求解效率和优化质量的技术问题,体现出更强的实用性;本发明通过建立航空器巡航离散动态模型,综合考虑包括时间成本及燃油成本在内的经济目标,和包括CO2、NOx排放及凝结尾生成在内的环保目标,提出了一种航空器绿色巡航轨迹规划方法,实现资源节约和环境友好的民航可持续发展目标;本发明为实际应用中的航空器绿色巡航轨迹规划提供更科学、更有效的工具。
附图说明
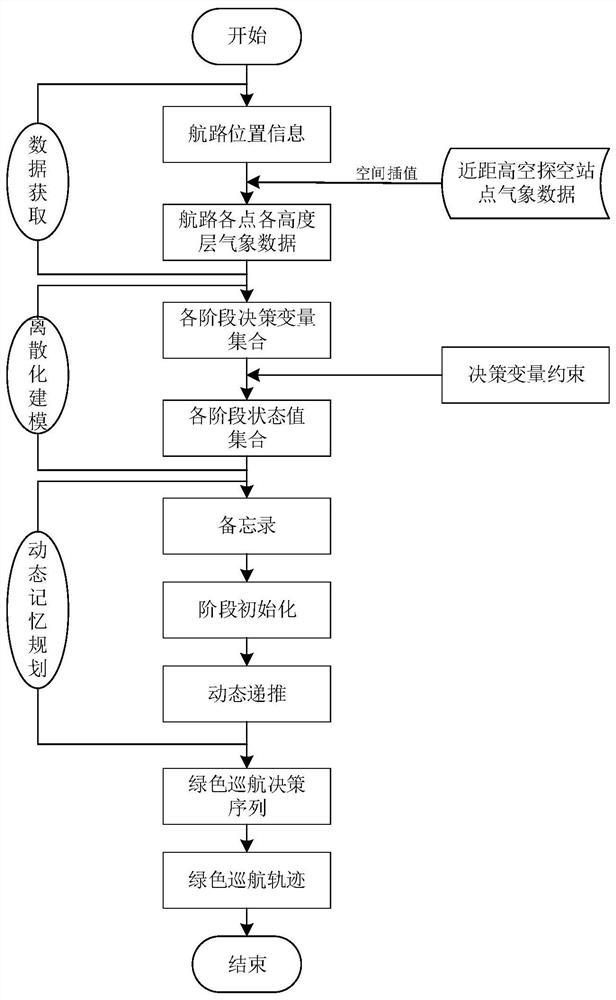
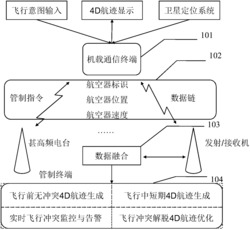
图1为本发明的总流程图;
图2为本发明提出的航空器巡航航程离散化示意图;
图3为本发明设计的航空器绿色巡航轨迹动态记忆规划流程图。
具体实施方式:
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
本发明基于经济和环保目标,建立航空器绿色巡航轨迹离散化模型,通过动态递推流程,求得全局最优解,引入备忘录,减小运算复杂度,为航空器绿色巡航轨迹规划提供模型和方法基础,为提升民航可持续发展能力提供有力支持。
如图1所示,一种航空器绿色巡航轨迹的动态记忆规划方法,所述方法包括:
步骤1:获取航空器巡航航路的位置信息及气象数据;
步骤1.1:获取航空器计划巡航航路上各航段起点、中间点和终点的经度和纬度;
步骤1.2:获取各航段中间点所在位置各个飞行高度层的大气压强、温度、相对湿度和饱和蒸气压,获取方法是:
步骤1.2.1:根据各航段中间点经度和纬度,选取距其最近的五个高空探测站点的气象数据为样本,从高空探空气象数据库中获取样本点的气象数据。
步骤1.1.2:对样本点的气象数据,使用反距离加权的空间插值法进行处理,获取航路上各点对应各个飞行高度层的气象数据,具体的计算公式为:
其中,Z
步骤2:航路离散化处理,如图2所示,定义各阶段决策变量、决策边界和状态值集合,具体的步骤是:
步骤2.1:根据航段起点和终点位置,将航空器巡航航程进行离散化分段,处理后,巡航航程由各个航段j组成,航段总数为J;
步骤2.2:定义各阶段决策变量(hj,vj),即航空器在航段j上的巡航策略,包括运行高度层hj和速度vj,体现为各阶段的决策节点选择,航段j上决策变量集合为
步骤2.3:定义各阶段决策边界,包括:
步骤2.3.1:定义高度决策边界,指航空器在航段j巡航时不得超过该管制空域内巡航高度层边界:
步骤2.3.2:定义速度决策边界,指航空器在航段j飞行时不得超出该管制空域内巡航速度范围:
步骤2.3.3:定义变化率决策边界,当航空器在每次飞行高度层转换时爬升或下降只能改变一个高度层、每次速度调整时增加或者减少量不得超过5m/s时,变化率决策边界表示为:
|hj+1-hj|≤600
|vj+1-vj|≤5
步骤2.4:定义状态值,即航空器在航段j上采取一定高度和速度策略进行巡航运行时的经济成本与由环境影响产生的外部效应补偿成本之和,即:
其中,sj(hj,vj)为(hj,vj)决策下航段j的状态值, 和 分别为(hj,vj)决策下航空器在航段j上巡航产生的经济成本和外部效应补偿成本。
步骤2.4.1:计算经济成本,包括:
步骤2.4.1.1:计算航空器在航段j上的巡航时长,计算公式是:
其中,lj为航段j的长度。
步骤2.4.1.2:计算航空器在航段j上的燃油消耗量,计算公式是:
其中, 为航空器机型对应的第一推力指定燃油消耗系数, 为第二推力指定燃油消耗系数,Cfcr为巡航燃油流量消耗系数,P为大气压强,S为机翼面积,R为空气真实气体常数,m为航空器载重质量,T为大气温度, 和 分别为巡航附加阻力系数和巡航诱导阻力系数。
步骤2.4.1.3:计算航空器时间成本与燃油成本之和,得出经济成本,即:
其中,CT为时间成本系数,tj为航空器在航段j上的巡航时长,CF为燃油成本系数,FCj为航空器在航段j的燃油消耗量;
步骤2.4.2:计算外部效应补偿成本,具体步骤是:
步骤2.4.2.1:计算航段j上的NOx排放指数,计算方法是:
其中, 为一定巡航策略下航段j上的NOx排放指数, 为其基准值;FFRj(hj,vj)为航段j上燃油流量,FFRj
步骤2.4.2.2:获取航段j上航空器所在高度层的凝结尾生成系数,具体的方法是:
当hj处的外界大气条件满足①RHcritical≤RHw≤100%和②RHi≥100%两个条件时,有凝结尾生成,其中,RHcritical为临界相对湿度,RHw为水面相对湿度,RHi为冰面相对湿度。
步骤2.4.2.3:计算CO2,NOx和凝结尾的绝对瞬时全球温变潜势,计算公式为:
其中,APGPP(H)为污染物P在时间水平H年下的绝对瞬时温变潜势;AP为单位质量温室气体浓度改变的辐射强迫;EFcon为单位长度凝结尾总能量;a0为耦合系数、ak为第一系列计算系数、αk为第二系列计算系数、cj为第三系列计算系数、dj为第四系列计算系数,α为NOx寿命长度,e为自然常数.
步骤2.4.2.4:计算等效温变成本,得出外部效应补偿成本,即:
其中,SCC为国际社会碳排放成本; 和APGPcon(H)分别为CO2,NOx和凝结尾在时间水平H年下的绝对瞬时温变潜势; 为CO2排放指数,其取值恒定,与发动机类型有关; 为航空器在航段j上的NOx排放指数,随不同航段巡航条件的变化取值不同;β(hj)为航空器在航段j上航空器所在高度层hj的凝结尾生成系数。
步骤3:创建记忆备忘录并进行初始化,包括:
步骤3.3.1:创建状态累积值备忘录Memo1,存储各航段上各决策节点对应的状态累积值Cj(hj,vj),其初始值均设为“NULL”。
步骤3.3.2:创建中间点值备忘录Memo2,存储各航段中间点值Fj,其初始值均设为“NULL”。
步骤4:动态记忆递推得出最优巡航轨迹,如图3所示,具体的流程是:
步骤4.1:航段初始化,包括航段序号,巡航高度和速度的初始化,即:
j=0
vj=v0
hj=h0
步骤4.2:在Memo2中按关键字j查找所在航段j的中间点值Fj,若不为“NULL”,直接提取,转到步骤4.4,若为“NULL”,转到步骤4.3。
步骤4.3:计算中间点值Fj并存入Memo2,具体的步骤是:
步骤4.3.1:在Memo1中按关键字j、hj和vj决策节点的状态累积值,若不为“NULL”,直接提取,转到步骤4.3.3,若为“NULL”,转到步骤4.3.2:
步骤4.3.2:计算决策节点的状态累积值Cj(hj,vj)并存入Memo1,步骤是:
步骤4.3.2.1:对于决策节点的每个子节点,判断决策变量是否超出决策边界,若超出,记该子节点对应的状态累积值Cj(hj,vj)为Inf,转到步骤4.3.2.3,若不超出,转到步骤4.3.2.2;
步骤4.3.2.2:获取下一航段的中间点值Fj+1,并与子节点的状态值sj(hj,vj)与相加,得出节点的状态累积值Cj(hj,vj),即:
Cj(hj,vj)=sj+1(hj,vj)+Fj+1
步骤4.3.2.3:将Cj(hj,vj)存入Memo1;
步骤4.3.3:取航段j各决策节点状态累积值Cj(hj,vj)的最小值,记为航段j的中间点值,即:
Fj=min{sj+1(hj,vj)+Fj+1}
步骤4.3.4:将中间点值Fj存入Memo2。
步骤4.4:递推到下一航段,重复步骤4.2,直至航段序列数到达J,获得各节点序列即为绿色巡航轨迹航段决策序列。
步骤4.5:获取各阶段决策节点,得出航空器绿色巡航轨迹。
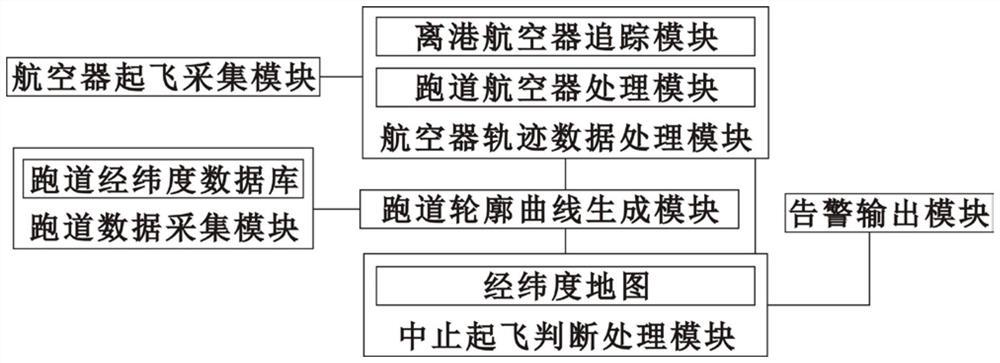
一种航空器绿色巡航轨迹动态记忆规划系统,所述系统包括:
数据获取模块:用于获取航空器巡航航路位置及气象数据;
处理模块:用于根据位置信息对航路进行离散化处理,将航路划分为多个航段;
获取模块:用于获取各航段的决策变量、决策边界和状态值;
计算模块:用于将决策变量、决策边界和状态值代入动态记忆递推算法,计算得到最优巡航轨迹。
一种航空器绿色巡航轨迹动态记忆规划系统,所述系统包括处理器和存储介质;
所述存储介质用于存储指令;
所述处理器用于根据所述指令进行操作以执行上述所述方法的步骤。
计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述所述方法的步骤。
本发明根据航段对巡航航程进行离散化处理,综合考虑经济目标,和环保目标,提出了一种航空器绿色巡航轨迹规划方法;设计一种新的动态记忆规划方法,通过动态的递推流程,求得全局最优解,引入备忘录,减少冗余和不必要的运算,解决了现有方法不能兼顾求解效率和优化质量的技术问题,具备更高的实用性;本发明为实际应用中的航空器绿色巡航轨迹规划提供更科学、更有效的工具。
本申请是参照根据本申请实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
以上仅为本发明的实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均包含在申请待批的本发明的权利要求范围之内。
一种航空器绿色巡航轨迹的动态记忆规划方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0